





Преобразование энергии и потери в АД наглядно иллюстрирует энергетическая диаграмма, которая изображается в виде потока энергии с ответвлениями, символизирующими те или иные потери (рис. 1).

Рис. 1 - Энергетическая диаграмма асинхронного двигателя
АД потребляет из сети мощность:

Часть этой мощности расходуется на покрытие магнитных потерь в сердечнике статора на гистерезис и вихревые токи:

Поскольку в рабочем режиме частота перемагничивания ротора мала, то потерями в стали ротора обычно пренебрегают. Кроме того, необходимо учитывать электрические потери в обмотке статора, которые равны:

Оставшаяся часть мощности передается через воздушный зазор в ротор электромагнитным путем и поэтому называется электромагнитной мощностью:

На основании схемы замещения приведенного АД электромагнитная мощность, передаваемая в ротор, может быть записана выражением:

или

Часть электромагнитной мощности расходуется в виде электрических потерь в обмотке ротора:

Исходя из формулы Pэм, эти потери могут быть записаны также через мощность Рэм и скольжение s:

т.е. электрические потери в обмотке ротора пропорциональны скольжению.
Оставшаяся часть электромагнитной мощности преобразуется в механическую мощность АД:

Полезная механическая мощность на валу АД меньше мощности Рмех на величину механических:

и добавочных

потерь:

Механические потери обусловлены трением в подшипниках и трением вращающихся частей о воздух. Добавочные потери вызваны наличием в двигателе магнитных полей рассеяния и полей высших гармоник.
Коэффициент полезного действия определяется отношением полезной мощности на валу к мощности, потребляемой им из сети, т.е.:

где

www.radioingener.ru
Энергетическая диаграмма позволяет судить о характере распределения мощности, потребляемой двигателем из сети. Ее можно получить с помощью векторной диаграммы (рис.4.9). При работе асинхронный двигатель потребляет из сети активную мощность
 .
.
Из векторной диаграммы можно получить следующие соотношения:
С учетом этих соотношений выражение для мощности  преобразуется к виду
преобразуется к виду
 .
.
Отсюда следует, что мощность расходуется в статоре на покрытие электрических потерь в обмотке статора,

и на покрытие потерь в стали,
 .
.
Остальная мощность поступает через воздушный зазор в ротор. Эта мощность определяет электромагнитный момент двигателя, поэтому ее называют электромагнитной мощностью
 .
.
Из векторной диаграммы можно получить следующее соотношение:
 ,
,
поэтому для электромагнитной мощности справедливо второе выражение:
 .
.
Часть электромагнитной мощности, как мы выяснили выше, теряется в виде электрических потерь в обмотке ротора,
 ,
,
а остальная часть мощности  преобразуется в механическую мощность
преобразуется в механическую мощность
 .
.
Часть механической мощности  теряется внутри самой машины в виде механических потерь
теряется внутри самой машины в виде механических потерь  , магнитных потерь
, магнитных потерь  и добавочных потерь
и добавочных потерь  . Механические потери включают потери на трение и на вентиляцию. Их расчет выполняется по эмпирическим формулам. Магнитные потери обычно малы и отдельно не определяются , а учитываются в
. Механические потери включают потери на трение и на вентиляцию. Их расчет выполняется по эмпирическим формулам. Магнитные потери обычно малы и отдельно не определяются , а учитываются в  вместе с потерями в стали статора. Добавочные потери вызваны в основном высшими гармониками магнитных полей. Они трудно поддаются расчету. Поэтому добавочные потери оценивают приближенно величиной 0,5% от номинальной мощности двигателя.
вместе с потерями в стали статора. Добавочные потери вызваны в основном высшими гармониками магнитных полей. Они трудно поддаются расчету. Поэтому добавочные потери оценивают приближенно величиной 0,5% от номинальной мощности двигателя.
Полезная мощность на валу двигателя
 .
.
 |
В соответствии с изложенным энергетическую диаграмму двигателя можно представить в виде, показанном на рис. 4.10. Сумма потерь  определяет КПД двигателя
определяет КПД двигателя
 .
.
КПД двигателей мощностью от 1 кВт до 1000 кВт лежит в пределах  .
.
poznayka.org
Векторная диаграмма асинхронного двигателя строится на основе схемы замещения с учётом магнитных потерь (рис 2. [10]). Она аналогична векторной диаграмме трансформатора и отличается от нее относительно большой величиной намагничивающего тока IM и тем, что электрическая нагрузка вторичной цепи, соответствующая механической мощности РМХ , является чисто активной. Ввиду малости скольжения сопротивление  значительно больше
значительно больше и угол
и угол поэтому мал.
поэтому мал.
Рис. 1
Рис. 2
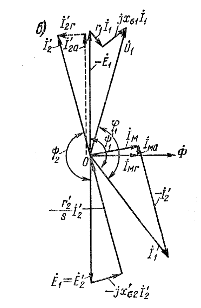

Для построения векторной диаграммы необходимо рассмотреть соотношение, величины вторичного тока I2 при вращающемся с любым скольжением роторе:

В генераторном режиме s<0 и, согласно выше написанному выражению, по-прежнему  , т.е.становится отрицательной и меняет свою фазу на 180. Физически это объясняется тем, что поле вращается относительно ротора по сравнению с двигательным режимом в обратною сторону, вследствие чего изменяются знаки эдс E2S и активной составляющей тока I2. В результате изменяется также знак вращающего момента, т.е. последний действует против направления вращения и становится тормозящим. На основании изложенного построена векторная диаграмма на рисунке 2.
, т.е.становится отрицательной и меняет свою фазу на 180. Физически это объясняется тем, что поле вращается относительно ротора по сравнению с двигательным режимом в обратною сторону, вследствие чего изменяются знаки эдс E2S и активной составляющей тока I2. В результате изменяется также знак вращающего момента, т.е. последний действует против направления вращения и становится тормозящим. На основании изложенного построена векторная диаграмма на рисунке 2.
По сравнению с двигательным и генераторным режимами работы в режиме противовключения сопротивление  мало. Поэтому на основании следующего равенства:
мало. Поэтому на основании следующего равенства:
 можно заключить, что ток I2 и угол
можно заключить, что ток I2 и угол  велики. Соответственно этому первичный токI1 и угол сдвига фаз
велики. Соответственно этому первичный токI1 и угол сдвига фаз  так же велики. Это также указывает на опасность режима в тепловом соотношении. Поэтому приU1=U1H рассматриваемый режим допускается лишь кратковременно. На основании выше изложенного построим векторную диаграмму режима противовключения.
так же велики. Это также указывает на опасность режима в тепловом соотношении. Поэтому приU1=U1H рассматриваемый режим допускается лишь кратковременно. На основании выше изложенного построим векторную диаграмму режима противовключения.

Рис. 3

Двигатель потребляет из сети активную мощность Р1=m1U1I1cosφ1. Часть этой мощности теряется в виде электрических потерь в активном сопротивлении обмотки статора рэл1= m1(I1)2 r1, другая часть теряется в виде магнитных потерь в сердечнике статора рмг =m1(Iм)2rм. Оставшаяся часть активной мощности представляет собой электромагнитную мощность Рэм (Рэм = Р1- рэл1- рмг), передаваемую магнитным полем со статора на ротор. Часть электромагнитной мощности теряется в виде электрических потерь в активном сопротивлении обмотки ротора  Остальная часть электромагнитной мощности превращается в механическую мощность, развиваемую на роторе Рмх = Рэм- рэл2. Часть механической мощности Рмх теряется внутри самой машины в виде механических потерь рмх (на вентиляцию, на трение в подшипниках и на щетках машин с фазным ротором, если эти щетки при работе не поднимаются) и добавочных потерь рд (от высших гармоник МДС обмоток и от зубчатости статора и ротора). Полезная механическая мощность на валу Р2= Рмх- рмх- рд.
Остальная часть электромагнитной мощности превращается в механическую мощность, развиваемую на роторе Рмх = Рэм- рэл2. Часть механической мощности Рмх теряется внутри самой машины в виде механических потерь рмх (на вентиляцию, на трение в подшипниках и на щетках машин с фазным ротором, если эти щетки при работе не поднимаются) и добавочных потерь рд (от высших гармоник МДС обмоток и от зубчатости статора и ротора). Полезная механическая мощность на валу Р2= Рмх- рмх- рд.
Для генераторного режима работы энергетическая диаграмма будет выглядеть симметрично.
Режим электромагнитного тормоза.
Скольжение s>l получается при вращении ротора против поля. При этом электрические потери в цепи ротора Рэ2 = sРэм будут больше мощности Pэм и, следовательно, только частично покрываются за счет Рэм, передаваемой полем со статора ротору. Другая часть электрических потерь в цепи ротора (s-1)Рэм покрывается за счет механической мощности, приложенной к ротору. Механическая мощность ротора будет отрицательной. Это значит, что она не отдается ротором, а подводится к нему и преобразуется в электрические потери в цепи ротора, т. е. поглощается в самой машине. Поэтому режим работы приs>l называется тормозным режимом.
будет отрицательной. Это значит, что она не отдается ротором, а подводится к нему и преобразуется в электрические потери в цепи ротора, т. е. поглощается в самой машине. Поэтому режим работы приs>l называется тормозным режимом.
Электромагнитный момент при этом действует на ротор в направлении вращения поля, т. е. против вращения ротора; следовательно, он является тормозящим по отношению к внешнему моменту, приложенному к валу машины.
Энергетическая диаграмма реактивной мощности
Энергетическая диаграмма реактивной мощности асинхронного двигателя может быть изображена следующим образом.
Двигатель потребляет из сети реактивную мощность



На создание потоков рассеяния обмоток статора и ротора расходуются реактивная мощность  .
.
Реактивная мощность  расходуется на создание основного магнитного поля машины.
расходуется на создание основного магнитного поля машины.
 - на создание вторичных полей рассеяния.
- на создание вторичных полей рассеяния.
И тогда:
 .
.

studfiles.net
Работе в двигательном режиме соответствует скольжение s в пределах от 1 до 0, причем рабочим режимом является диапазон скоростей, при которых скольжение не превышает sк. В диапазоне скольжений от sк до 1 потери в роторе двигателя существенно возрастают, поэтому этот участок механической характеристики двигатель проходит только во время пуска. Проведем анализ распределения потоков электрической энергии при различных значениях скольжения асинхронного двигателя.
На рис.3.12 представлена энергетическая диаграмма асинхронного двигателя.
Мощность Рпотр, забираемая двигателем, за исключением потерь в обмотках и стали статора  преобразуется в мощность вращающегося магнитного поля – в электромагнитную мощностьРэм. Поскольку асинхронный двигатель работает одновременно как двигатель и как трансформатор, то электромагнитная мощность разделяется на два канала. Одна часть электромагнитной мощности преобразуется в механическую мощность Рмех, создаваемую на валу асинхронного двигателя. Эта мощность возникает как результат взаимодействия вращающегося электромагнитного поля с активной составляющей тока ротора. Другая часть электромагнитной мощности трансформируется в виде электрической мощности в обмотку ротора, как во вторичную обмотку трансформатора.
преобразуется в мощность вращающегося магнитного поля – в электромагнитную мощностьРэм. Поскольку асинхронный двигатель работает одновременно как двигатель и как трансформатор, то электромагнитная мощность разделяется на два канала. Одна часть электромагнитной мощности преобразуется в механическую мощность Рмех, создаваемую на валу асинхронного двигателя. Эта мощность возникает как результат взаимодействия вращающегося электромагнитного поля с активной составляющей тока ротора. Другая часть электромагнитной мощности трансформируется в виде электрической мощности в обмотку ротора, как во вторичную обмотку трансформатора.
Электромагнитная мощность равна произведению скорости вращения поля статора  на моментМ, который развивается на валу асинхронного двигателя.
на моментМ, который развивается на валу асинхронного двигателя.
 . (3.32)
. (3.32)
Электромагнитная мощность разделяется на две составляющие:
 (3.33)
(3.33)
механическую мощность
 (3.34)
(3.34)
и электрическую мощность Ps, трансформируемую в обмотки ротора, которая, как следует из (3.32) и (3.34), будет равна:
 . (3.35)
. (3.35)
Отсюда следует, что Рs мощность скольжения, выделяемая в обмотках ротора, пропорциональна моменту на валу двигателя и его скольжению. Эта мощность рассеивается в виде потерь в обмотках ротора двигателя (для фазных двигателей во время пуска – также в пусковых сопротивлениях).
При проектировании и использовании асинхронных двигателей стремятся уменьшить мощность скольжения, чтобы уменьшить потери электроэнергии, снизить нагрев двигателя и повысить его кпд. Асинхронные двигатели конструируются таким образом, чтобы номинальное скольжение составляло всего несколько процентов. Для экономичной эксплуатации асинхронных электроприводов важным условием является работа с минимальным скольжением. Это правило должно выдерживаться и для регулируемых асинхронных электроприводов. Исключения составляют каскадные схемы включения асинхронного двигателя с фазным ротором, где мощность скольжения используется полезно.
Величина потока асинхронного двигателя пропорциональна напряжению питания U1, величина э.д.с. ротора, а, следовательно, и ток ротора I2 также пропорциональны напряжению статора. Поэтому момент асинхронного двигателя, в том числе максимальный момент, пропорциональны квадрату напряжения U1 (см. 3.19, 3.22). Это обстоятельство определяет недопустимость значительного снижения напряжения питания при пуске и работе асинхронного двигателя. Так, при снижении питающего напряжения на 30% его максимальный момент уменьшится примерно в два раза и при значительном статическом моменте двигатель может «опрокинуться», т.е. остановиться и оказаться под пусковым током. Этот режим является для двигателя аварийным. Такая же ситуация может сложиться, если напряжение питания снижено при пуске двигателя под нагрузкой. Указанные случаи имеют место в слабых электрических сетях, что обуславливает большую аварийность асинхронных короткозамкнутых двигателей. Во избежание этого должны предусматриваться необходимые защитные средства, предотвращающие длительное нахождение асинхронного двигателя под пусковым током.
В то же время преднамеренное снижение (регулирование) напряжения, подаваемого на статорные обмотки, иногда используется для регулирования скорости асинхронного двигателя и для обеспечения плавности пуска.
Регулирование скорости асинхронного двигателя путем изменения питающего напряжения сопряжено с возможностью перегрева его ротора и может производиться лишь при определенных условиях:
при малом диапазоне снижения скорости относительно номинальной;
при сниженном относительно номинального моменте сопротивления на валу двигателя;
использовании двигателя с повышенным скольжением.
Рассмотрим механические характеристики асинхронного короткозамкнутого двигателя с повышенным скольжением при регулировании напряжения статора (рис. 3.13). При снижении напряжения U1 критическое скольжение двигателя и скорость идеального холостого хода  остаются постоянными, а максимальный моментМк двигателя уменьшается примерно пропорционально квадрату снижения напряжения, соответственно снижается жесткость рабочей части механической характеристики двигателя. Регулирование скорости возможно в диапазоне
остаются постоянными, а максимальный моментМк двигателя уменьшается примерно пропорционально квадрату снижения напряжения, соответственно снижается жесткость рабочей части механической характеристики двигателя. Регулирование скорости возможно в диапазоне  .
.
Предположим, что момент сопротивления на валу двигателя остается постоянным и равным номинальному  . При снижении напряжения до величиныU12 двигатель будет работать со скоростью, равной
. При снижении напряжения до величиныU12 двигатель будет работать со скоростью, равной  со скольжениемsр. Как следует из энергетической диаграммы асинхронного двигателя (3.35), мощность скольжения Рs, выделяемая в виде потерь в роторе двигателя будет равна
со скольжениемsр. Как следует из энергетической диаграммы асинхронного двигателя (3.35), мощность скольжения Рs, выделяемая в виде потерь в роторе двигателя будет равна  и пропорциональна заштрихованной площади прямоугольникаОавsр. Электромагнитная мощность
и пропорциональна заштрихованной площади прямоугольникаОавsр. Электромагнитная мощность  пропорциональна площадиОаг1, полезная мощность на валу двигателя
пропорциональна площадиОаг1, полезная мощность на валу двигателя  будет пропорциональна площадиsрв,г1.
будет пропорциональна площадиsрв,г1.
Номинальная мощность скольжения, на рассеяние которой рассчитана конструкция двигателя, пропорциональна площади Оабsн. Сравним эту площадь с заштрихованной (Оавsр), которая отражает потери в роторе двигателя при работе в точке «в». Она примерно в 3 раза превосходит номинальные потери в роторе. Естественно, что при длительной работе в указанном режиме ротор двигателя будет перегреваться и двигатель выйдет из строя. Для того, чтобы можно было применить данный способ регулирования, нужно установленную мощность двигателя завысить в 3 раза или применить специальную конструкцию интенсивного теплоотвода.
2
Поэтому регулирование скорости изменением напряжения питания возможно в том случае, если момент сопротивления Мс при снижении скорости существенно меньше номинального. Такой способ регулирования применяется иногда для привода насосов и вентиляторов, у которых момент сопротивления на валу резко снижается при уменьшении скорости. Этот случай рассмотрен на рис.3.13,б. Поскольку со снижением скорости Мс уменьшается примерно в квадрате от величины снижения скорости, то мощность скольжения Рs со снижением скорости растет не столь существенно. Если нагрузка на валу двигателя носит вентиляторный характер, то максимальная величина мощности скольжения составляет 15% от мощности на валу при номинальной скорости. Поэтому для привода вентиляторов и насосов достаточно увеличение установленной мощности двигателя с повышенным скольжением в 1,5-2 раза.
Снижение напряжения на статоре асинхронного двигателя иногда используется для уменьшения пусковых токов двигателя. Это возможно, если момент сопротивления на валу двигателя при пуске не превышает 0,3-0,4Мн (насосы, вентиляторы или другие рабочие машины, пуск которых производится вхолостую). В этом случае посредством тиристорного регулятора напряжение, подводимое к обмотке статора, снижается, а затем по мере разгона двигателя увеличивается до номинального значения. Этим обеспечивается «плавный пуск» двигателя с уменьшенными пусковыми токами и сниженными динамическими нагрузками на рабочую машину.
studfiles.net
Асинхронный двигатель потребляет из сети активную мощность P1=m1U1I1cosφ1. часть этой мощности теряется в виде электрический потерь pэл1 в активном сопротивлении первичной обмотки: pэл1=m1I21r1, а другая часть – в виде магнитных потерь pмг1=m1 I2мrм в сердечнике статора. Оставшаяся часть мощности Pэм=P1- pэл1- pмг1 представляет собой электромагнитную мощность, передаваемую посредством магнитного поля со статора на ротор. На схеме замещения этой мощности соответствует мощность в активном сопротивлении вторичной цепи r’2/S. Pэм= m2I22r2/S. Часть этой мощности теряется в виде электрических потерь pэл2=m2I22r2 в активном сопротивлении вторичной обмотки r’2. Остальная часть мощности Pмх= Pэм-pэл2 превращается в механическую мощность развиваемую на роторе. Pмх= m2I22r2(1-S)/S Часть механической мощности теряется внутри самой машины в виде механических потерь pмх (на вентилятор, трение и т.д.), магнитных потерь сердечнике ротора pмг2 и добавочных потерь pд. Последние вызваны высшими гармониками магнитных полей, которые возникают ввиду наличия высших гармоник обмоток и зубчатого строения статора и ротора. Во-первых, высшие гармоники поля индуктируют э. д. с. и токи в обмотках, в связи с чем появляются добавочные электрические потери. Эти потери заметны по величине только в обмотках типа беличьей клетки. Во-вторых, эти гармоники поля обусловливают добавочные магнитные потери на поверхности (поверхностные потери) и в теле зубцов (пульсационные потери) статора и ротора. Вращение зубцов ротора относительно зубцов статора вызывает пульсации магнитного потока в зубцах, и поэтому соответствующая часть потерь называется пульсационными потерями. Магнитные потери в сердечнике ротора при нормальных рабочих режимах обычно очень малы и отдельно не учитываются. Добавочные потери трудно поддаются расчету и экспериментальному определению. Поэтому, согласно ГОСТ 183—66, их принимают равными 0,5% от подводимой мощности при номинальной нагрузке, а при других нагрузках эти потери пересчитывают пропорционально квадрату первичного тока. Отметим, что в обмотках возникают также добавочные потери от вихревых токов в связи с поверхностными эффектами. Однако эти потери в случае необходимости учитывают соответствующим увеличением сопротивлений r1 и r2 и поэтому в величину pд не включают.Сумма потерь двигателя p∑= pэл1+ pмг+ pэл2+ Pмх + pд
pмг1=m1 I2мrм в сердечнике статора. Оставшаяся часть мощности Pэм=P1- pэл1- pмг1 представляет собой электромагнитную мощность, передаваемую посредством магнитного поля со статора на ротор. На схеме замещения этой мощности соответствует мощность в активном сопротивлении вторичной цепи r’2/S. Pэм= m2I22r2/S. Часть этой мощности теряется в виде электрических потерь pэл2=m2I22r2 в активном сопротивлении вторичной обмотки r’2. Остальная часть мощности Pмх= Pэм-pэл2 превращается в механическую мощность развиваемую на роторе. Pмх= m2I22r2(1-S)/S Часть механической мощности теряется внутри самой машины в виде механических потерь pмх (на вентилятор, трение и т.д.), магнитных потерь сердечнике ротора pмг2 и добавочных потерь pд. Последние вызваны высшими гармониками магнитных полей, которые возникают ввиду наличия высших гармоник обмоток и зубчатого строения статора и ротора. Во-первых, высшие гармоники поля индуктируют э. д. с. и токи в обмотках, в связи с чем появляются добавочные электрические потери. Эти потери заметны по величине только в обмотках типа беличьей клетки. Во-вторых, эти гармоники поля обусловливают добавочные магнитные потери на поверхности (поверхностные потери) и в теле зубцов (пульсационные потери) статора и ротора. Вращение зубцов ротора относительно зубцов статора вызывает пульсации магнитного потока в зубцах, и поэтому соответствующая часть потерь называется пульсационными потерями. Магнитные потери в сердечнике ротора при нормальных рабочих режимах обычно очень малы и отдельно не учитываются. Добавочные потери трудно поддаются расчету и экспериментальному определению. Поэтому, согласно ГОСТ 183—66, их принимают равными 0,5% от подводимой мощности при номинальной нагрузке, а при других нагрузках эти потери пересчитывают пропорционально квадрату первичного тока. Отметим, что в обмотках возникают также добавочные потери от вихревых токов в связи с поверхностными эффектами. Однако эти потери в случае необходимости учитывают соответствующим увеличением сопротивлений r1 и r2 и поэтому в величину pд не включают.Сумма потерь двигателя p∑= pэл1+ pмг+ pэл2+ Pмх + pд
P2=P1- p∑К.П.Д. η=P2/P1=1- p∑/P1

асинхронного двигателя пропорционален его электромагнитной мощности, Н*м М=Рэм/w1, где w1=2пиf1/p—угловая синхронная частота. Электромагнитная мощность Pэм=Pэ2/s=m2*r2*I2^2/s, или Pэм=m1*I'2^2*r'2/s, где r'2-приведенное активное cопротивление обмотки ротора; r'2=r2*kz, kz=m1*w1^2*kоб1^2 /(m2*w2^2*kоб2^2) - коэффициент приведения сопротивлений обмотки ротора. Приведенный ток ротора прямо пропорционален на пряженик) сети, А: I2=U1/sqrt((r1+r'2/s)^2+(x1+x'2)^2), где x'2=x2*kz — приведенное индуктивное сопротивление рассеяния обмотки ротора. Запишем зависимость электромагнитного момента асинхронного двигателя от скольжения, Н*м:  T.к. r1, r'2, x1 u x'2 при работе Д с различными частотами вращения ротора (скольженьями s) остаются приблизительно одинаковыми, а также неизменными остаются и параметры питающей сети U1 и fi, то М=... дает возможность установить зависимость электромагнитного момента М от скольжения s. Графическая зависимость М=f(s) представляет собой механическую характеристику АД (рис. 3.7).
T.к. r1, r'2, x1 u x'2 при работе Д с различными частотами вращения ротора (скольженьями s) остаются приблизительно одинаковыми, а также неизменными остаются и параметры питающей сети U1 и fi, то М=... дает возможность установить зависимость электромагнитного момента М от скольжения s. Графическая зависимость М=f(s) представляет собой механическую характеристику АД (рис. 3.7).

Анализ механической характеристики показывает, что при включении двигателя в сеть, когда вращающееся поле имеет частоту вращения n1 , а ротор еще неподвижен (n2=0, s=1), на роторе создается начальный пусковой момент Мп, выражение для которого получим из при s=1:  Под действием момента Мп ротор двигателя приводится во вращение, при этом скольжение уменьшается, а вращающий момент увеличивается. При критическом скольжении sкр момент достигает максимального значения. Критическое скольжение sкр пропорционально активному сопротивлению обмотки ротора: sкр=r'2/(x1+x'2).
Под действием момента Мп ротор двигателя приводится во вращение, при этом скольжение уменьшается, а вращающий момент увеличивается. При критическом скольжении sкр момент достигает максимального значения. Критическое скольжение sкр пропорционально активному сопротивлению обмотки ротора: sкр=r'2/(x1+x'2).
Максимальный электромагнитный момент асинхронного двигателя, Нм,  После достижения моментом значения Мmax частота вращения ротора продолжает увеличиваться, а момент — уменьшаться. Так продолжается до тех пор, пока электромагнитный момент М не станет равным сумме противодействующих моментов: М=Мо+М2=Мст, где Мо — момент холостого хода, М2—полезный нагрузочный момент, создаваемый рабочей машиной, приводимой во вращение двигателем. Пусть M2 соответствует номинальной нагрузке двигателя, тогда установившийся режим работы двигателя определится точкой на механической характеристике с координатами М=Мном и s=sном, где Мном и sном—номинальные значения электромагнитного момента и скольжения. Из анализа механической характеристики следует, то устойчивая работа асинхронного двигателя будет при скольжениях s<sкр, т.е. на участке ОА механической характеристики, где изменения нагрузки на валу Д сопровождаются соответствующими изменениями эл-маг момента. Так если Д работал в режиме номинальной нагрузки, а затем нагрузочный момент М2 на валу увеличился до M'2 то равенство моментов нарушится (Мном<Мо+М'2) частота вращения ротора начнет убывать, скольжение s -увеличиваться. Это приведет к росту эл-маг момента до значения М', равного сумме противодействующих восстановится. Асинхронные двигатели общего назначения малой мощности имеют перегрузочную способность =2,0—2,2 .
После достижения моментом значения Мmax частота вращения ротора продолжает увеличиваться, а момент — уменьшаться. Так продолжается до тех пор, пока электромагнитный момент М не станет равным сумме противодействующих моментов: М=Мо+М2=Мст, где Мо — момент холостого хода, М2—полезный нагрузочный момент, создаваемый рабочей машиной, приводимой во вращение двигателем. Пусть M2 соответствует номинальной нагрузке двигателя, тогда установившийся режим работы двигателя определится точкой на механической характеристике с координатами М=Мном и s=sном, где Мном и sном—номинальные значения электромагнитного момента и скольжения. Из анализа механической характеристики следует, то устойчивая работа асинхронного двигателя будет при скольжениях s<sкр, т.е. на участке ОА механической характеристики, где изменения нагрузки на валу Д сопровождаются соответствующими изменениями эл-маг момента. Так если Д работал в режиме номинальной нагрузки, а затем нагрузочный момент М2 на валу увеличился до M'2 то равенство моментов нарушится (Мном<Мо+М'2) частота вращения ротора начнет убывать, скольжение s -увеличиваться. Это приведет к росту эл-маг момента до значения М', равного сумме противодействующих восстановится. Асинхронные двигатели общего назначения малой мощности имеют перегрузочную способность =2,0—2,2 .
studfiles.net
Векторная диаграмма асинхронного двигателя строится на основе схемы замещения с учётом магнитных потерь (рис 2. [10]). Она аналогична векторной диаграмме трансформатора и отличается от нее относительно большой величиной намагничивающего тока IM и тем, что электрическая нагрузка вторичной цепи, соответствующая механической мощности РМХ , является чисто активной. Ввиду малости скольжения сопротивление  значительно больше
значительно больше и угол
и угол поэтому мал.
поэтому мал.
Рис. 1
Рис. 2


Для построения векторной диаграммы необходимо рассмотреть соотношение, величины вторичного тока I2 при вращающемся с любым скольжением роторе:

В генераторном режиме s<0 и, согласно выше написанному выражению, по-прежнему  , т.е.становится отрицательной и меняет свою фазу на 180. Физически это объясняется тем, что поле вращается относительно ротора по сравнению с двигательным режимом в обратною сторону, вследствие чего изменяются знаки эдс E2S и активной составляющей тока I2. В результате изменяется также знак вращающего момента, т.е. последний действует против направления вращения и становится тормозящим. На основании изложенного построена векторная диаграмма на рисунке 2.
, т.е.становится отрицательной и меняет свою фазу на 180. Физически это объясняется тем, что поле вращается относительно ротора по сравнению с двигательным режимом в обратною сторону, вследствие чего изменяются знаки эдс E2S и активной составляющей тока I2. В результате изменяется также знак вращающего момента, т.е. последний действует против направления вращения и становится тормозящим. На основании изложенного построена векторная диаграмма на рисунке 2.
По сравнению с двигательным и генераторным режимами работы в режиме противовключения сопротивление  мало. Поэтому на основании следующего равенства:
мало. Поэтому на основании следующего равенства:
 можно заключить, что ток I2 и угол
можно заключить, что ток I2 и угол  велики. Соответственно этому первичный токI1 и угол сдвига фаз
велики. Соответственно этому первичный токI1 и угол сдвига фаз  так же велики. Это также указывает на опасность режима в тепловом соотношении. Поэтому приU1=U1H рассматриваемый режим допускается лишь кратковременно. На основании выше изложенного построим векторную диаграмму режима противовключения.
так же велики. Это также указывает на опасность режима в тепловом соотношении. Поэтому приU1=U1H рассматриваемый режим допускается лишь кратковременно. На основании выше изложенного построим векторную диаграмму режима противовключения.

Рис. 3

Двигатель потребляет из сети активную мощность Р1=m1U1I1cosφ1. Часть этой мощности теряется в виде электрических потерь в активном сопротивлении обмотки статора рэл1= m1(I1)2 r1, другая часть теряется в виде магнитных потерь в сердечнике статора рмг =m1(Iм)2rм. Оставшаяся часть активной мощности представляет собой электромагнитную мощность Рэм (Рэм = Р1- рэл1- рмг), передаваемую магнитным полем со статора на ротор. Часть электромагнитной мощности теряется в виде электрических потерь в активном сопротивлении обмотки ротора  Остальная часть электромагнитной мощности превращается в механическую мощность, развиваемую на роторе Рмх = Рэм- рэл2. Часть механической мощности Рмх теряется внутри самой машины в виде механических потерь рмх (на вентиляцию, на трение в подшипниках и на щетках машин с фазным ротором, если эти щетки при работе не поднимаются) и добавочных потерь рд (от высших гармоник МДС обмоток и от зубчатости статора и ротора). Полезная механическая мощность на валу Р2= Рмх- рмх- рд.
Остальная часть электромагнитной мощности превращается в механическую мощность, развиваемую на роторе Рмх = Рэм- рэл2. Часть механической мощности Рмх теряется внутри самой машины в виде механических потерь рмх (на вентиляцию, на трение в подшипниках и на щетках машин с фазным ротором, если эти щетки при работе не поднимаются) и добавочных потерь рд (от высших гармоник МДС обмоток и от зубчатости статора и ротора). Полезная механическая мощность на валу Р2= Рмх- рмх- рд.
Для генераторного режима работы энергетическая диаграмма будет выглядеть симметрично.
Режим электромагнитного тормоза.
Скольжение s>l получается при вращении ротора против поля. При этом электрические потери в цепи ротора Рэ2 = sРэм будут больше мощности Pэм и, следовательно, только частично покрываются за счет Рэм, передаваемой полем со статора ротору. Другая часть электрических потерь в цепи ротора (s-1)Рэм покрывается за счет механической мощности, приложенной к ротору. Механическая мощность ротора будет отрицательной. Это значит, что она не отдается ротором, а подводится к нему и преобразуется в электрические потери в цепи ротора, т. е. поглощается в самой машине. Поэтому режим работы приs>l называется тормозным режимом.
будет отрицательной. Это значит, что она не отдается ротором, а подводится к нему и преобразуется в электрические потери в цепи ротора, т. е. поглощается в самой машине. Поэтому режим работы приs>l называется тормозным режимом.
Электромагнитный момент при этом действует на ротор в направлении вращения поля, т. е. против вращения ротора; следовательно, он является тормозящим по отношению к внешнему моменту, приложенному к валу машины.
Энергетическая диаграмма реактивной мощности
Энергетическая диаграмма реактивной мощности асинхронного двигателя может быть изображена следующим образом.
Двигатель потребляет из сети реактивную мощность



На создание потоков рассеяния обмоток статора и ротора расходуются реактивная мощность  .
.
Реактивная мощность  расходуется на создание основного магнитного поля машины.
расходуется на создание основного магнитного поля машины.
 - на создание вторичных полей рассеяния.
- на создание вторичных полей рассеяния.
И тогда:
 .
.

studfiles.net
Асинхронный двигатель потребляет из сети активную мощность P1=m1U1I1cosφ1. часть этой мощности теряется в виде электрический потерь pэл1 в активном сопротивлении первичной обмотки: pэл1=m1I21r1, а другая часть – в виде магнитных потерь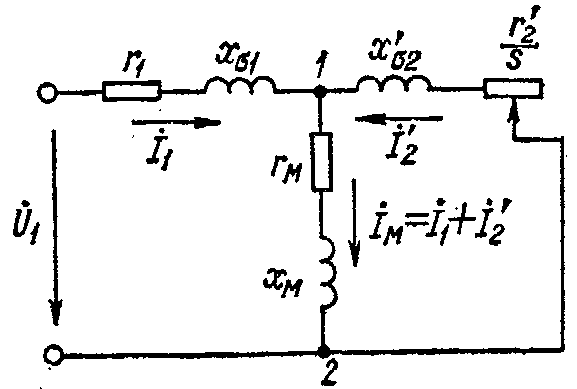 pмг1=m1 I2мrм в сердечнике статора. Оставшаяся часть мощности Pэм=P1- pэл1- pмг1 представляет собой электромагнитную мощность, передаваемую посредством магнитного поля со статора на ротор. На схеме замещения этой мощности соответствует мощность в активном сопротивлении вторичной цепи r’2/S. Pэм= m2I22r2/S. Часть этой мощности теряется в виде электрических потерь pэл2=m2I22r2 в активном сопротивлении вторичной обмотки r’2. Остальная часть мощности Pмх= Pэм-pэл2 превращается в механическую мощность развиваемую на роторе. Pмх= m2I22r2(1-S)/S Часть механической мощности теряется внутри самой машины в виде механических потерь pмх (на вентилятор, трение и т.д.), магнитных потерь сердечнике ротора pмг2 и добавочных потерь pд. Последние вызваны высшими гармониками магнитных полей, которые возникают ввиду наличия высших гармоник обмоток и зубчатого строения статора и ротора. Во-первых, высшие гармоники поля индуктируют э. д. с. и токи в обмотках, в связи с чем появляются добавочные электрические потери. Эти потери заметны по величине только в обмотках типа беличьей клетки. Во-вторых, эти гармоники поля обусловливают добавочные магнитные потери на поверхности (поверхностные потери) и в теле зубцов (пульсационные потери) статора и ротора. Вращение зубцов ротора относительно зубцов статора вызывает пульсации магнитного потока в зубцах, и поэтому соответствующая часть потерь называется пульсационными потерями. Магнитные потери в сердечнике ротора при нормальных рабочих режимах обычно очень малы и отдельно не учитываются. Добавочные потери трудно поддаются расчету и экспериментальному определению. Поэтому, согласно ГОСТ 183—66, их принимают равными 0,5% от подводимой мощности при номинальной нагрузке, а при других нагрузках эти потери пересчитывают пропорционально квадрату первичного тока. Отметим, что в обмотках возникают также добавочные потери от вихревых токов в связи с поверхностными эффектами. Однако эти потери в случае необходимости учитывают соответствующим увеличением сопротивлений r1 и r2 и поэтому в величину pд не включают.Сумма потерь двигателя p∑= pэл1+ pмг+ pэл2+ Pмх + pд
pмг1=m1 I2мrм в сердечнике статора. Оставшаяся часть мощности Pэм=P1- pэл1- pмг1 представляет собой электромагнитную мощность, передаваемую посредством магнитного поля со статора на ротор. На схеме замещения этой мощности соответствует мощность в активном сопротивлении вторичной цепи r’2/S. Pэм= m2I22r2/S. Часть этой мощности теряется в виде электрических потерь pэл2=m2I22r2 в активном сопротивлении вторичной обмотки r’2. Остальная часть мощности Pмх= Pэм-pэл2 превращается в механическую мощность развиваемую на роторе. Pмх= m2I22r2(1-S)/S Часть механической мощности теряется внутри самой машины в виде механических потерь pмх (на вентилятор, трение и т.д.), магнитных потерь сердечнике ротора pмг2 и добавочных потерь pд. Последние вызваны высшими гармониками магнитных полей, которые возникают ввиду наличия высших гармоник обмоток и зубчатого строения статора и ротора. Во-первых, высшие гармоники поля индуктируют э. д. с. и токи в обмотках, в связи с чем появляются добавочные электрические потери. Эти потери заметны по величине только в обмотках типа беличьей клетки. Во-вторых, эти гармоники поля обусловливают добавочные магнитные потери на поверхности (поверхностные потери) и в теле зубцов (пульсационные потери) статора и ротора. Вращение зубцов ротора относительно зубцов статора вызывает пульсации магнитного потока в зубцах, и поэтому соответствующая часть потерь называется пульсационными потерями. Магнитные потери в сердечнике ротора при нормальных рабочих режимах обычно очень малы и отдельно не учитываются. Добавочные потери трудно поддаются расчету и экспериментальному определению. Поэтому, согласно ГОСТ 183—66, их принимают равными 0,5% от подводимой мощности при номинальной нагрузке, а при других нагрузках эти потери пересчитывают пропорционально квадрату первичного тока. Отметим, что в обмотках возникают также добавочные потери от вихревых токов в связи с поверхностными эффектами. Однако эти потери в случае необходимости учитывают соответствующим увеличением сопротивлений r1 и r2 и поэтому в величину pд не включают.Сумма потерь двигателя p∑= pэл1+ pмг+ pэл2+ Pмх + pд
P2=P1- p∑К.П.Д. η=P2/P1=1- p∑/P1

асинхронного двигателя пропорционален его электромагнитной мощности, Н*м М=Рэм/w1, где w1=2пиf1/p—угловая синхронная частота. Электромагнитная мощность Pэм=Pэ2/s=m2*r2*I2^2/s, или Pэм=m1*I'2^2*r'2/s, где r'2-приведенное активное cопротивление обмотки ротора; r'2=r2*kz, kz=m1*w1^2*kоб1^2 /(m2*w2^2*kоб2^2) - коэффициент приведения сопротивлений обмотки ротора. Приведенный ток ротора прямо пропорционален на пряженик) сети, А: I2=U1/sqrt((r1+r'2/s)^2+(x1+x'2)^2), где x'2=x2*kz — приведенное индуктивное сопротивление рассеяния обмотки ротора. Запишем зависимость электромагнитного момента асинхронного двигателя от скольжения, Н*м:  T.к. r1, r'2, x1 u x'2 при работе Д с различными частотами вращения ротора (скольженьями s) остаются приблизительно одинаковыми, а также неизменными остаются и параметры питающей сети U1 и fi, то М=... дает возможность установить зависимость электромагнитного момента М от скольжения s. Графическая зависимость М=f(s) представляет собой механическую характеристику АД (рис. 3.7).
T.к. r1, r'2, x1 u x'2 при работе Д с различными частотами вращения ротора (скольженьями s) остаются приблизительно одинаковыми, а также неизменными остаются и параметры питающей сети U1 и fi, то М=... дает возможность установить зависимость электромагнитного момента М от скольжения s. Графическая зависимость М=f(s) представляет собой механическую характеристику АД (рис. 3.7).

Анализ механической характеристики показывает, что при включении двигателя в сеть, когда вращающееся поле имеет частоту вращения n1 , а ротор еще неподвижен (n2=0, s=1), на роторе создается начальный пусковой момент Мп, выражение для которого получим из при s=1:  Под действием момента Мп ротор двигателя приводится во вращение, при этом скольжение уменьшается, а вращающий момент увеличивается. При критическом скольжении sкр момент достигает максимального значения. Критическое скольжение sкр пропорционально активному сопротивлению обмотки ротора: sкр=r'2/(x1+x'2).
Под действием момента Мп ротор двигателя приводится во вращение, при этом скольжение уменьшается, а вращающий момент увеличивается. При критическом скольжении sкр момент достигает максимального значения. Критическое скольжение sкр пропорционально активному сопротивлению обмотки ротора: sкр=r'2/(x1+x'2).
Максимальный электромагнитный момент асинхронного двигателя, Нм,  После достижения моментом значения Мmax частота вращения ротора продолжает увеличиваться, а момент — уменьшаться. Так продолжается до тех пор, пока электромагнитный момент М не станет равным сумме противодействующих моментов: М=Мо+М2=Мст, где Мо — момент холостого хода, М2—полезный нагрузочный момент, создаваемый рабочей машиной, приводимой во вращение двигателем. Пусть M2 соответствует номинальной нагрузке двигателя, тогда установившийся режим работы двигателя определится точкой на механической характеристике с координатами М=Мном и s=sном, где Мном и sном—номинальные значения электромагнитного момента и скольжения. Из анализа механической характеристики следует, то устойчивая работа асинхронного двигателя будет при скольжениях s<sкр, т.е. на участке ОА механической характеристики, где изменения нагрузки на валу Д сопровождаются соответствующими изменениями эл-маг момента. Так если Д работал в режиме номинальной нагрузки, а затем нагрузочный момент М2 на валу увеличился до M'2 то равенство моментов нарушится (Мном<Мо+М'2) частота вращения ротора начнет убывать, скольжение s -увеличиваться. Это приведет к росту эл-маг момента до значения М', равного сумме противодействующих восстановится. Асинхронные двигатели общего назначения малой мощности имеют перегрузочную способность =2,0—2,2 .
После достижения моментом значения Мmax частота вращения ротора продолжает увеличиваться, а момент — уменьшаться. Так продолжается до тех пор, пока электромагнитный момент М не станет равным сумме противодействующих моментов: М=Мо+М2=Мст, где Мо — момент холостого хода, М2—полезный нагрузочный момент, создаваемый рабочей машиной, приводимой во вращение двигателем. Пусть M2 соответствует номинальной нагрузке двигателя, тогда установившийся режим работы двигателя определится точкой на механической характеристике с координатами М=Мном и s=sном, где Мном и sном—номинальные значения электромагнитного момента и скольжения. Из анализа механической характеристики следует, то устойчивая работа асинхронного двигателя будет при скольжениях s<sкр, т.е. на участке ОА механической характеристики, где изменения нагрузки на валу Д сопровождаются соответствующими изменениями эл-маг момента. Так если Д работал в режиме номинальной нагрузки, а затем нагрузочный момент М2 на валу увеличился до M'2 то равенство моментов нарушится (Мном<Мо+М'2) частота вращения ротора начнет убывать, скольжение s -увеличиваться. Это приведет к росту эл-маг момента до значения М', равного сумме противодействующих восстановится. Асинхронные двигатели общего назначения малой мощности имеют перегрузочную способность =2,0—2,2 .
studfiles.net










