Ответ9 : Для трехфазного АД возможности регулирования частоты ( в оборотах в минуту) определяются соотношением
n=60 f / p (1 - S), где
f-частота переменного тока;
S-скольжение;
p-число пар полюсов.
Следовательно частоту вращения асинхронного двигателя можно регулировать изменяя:
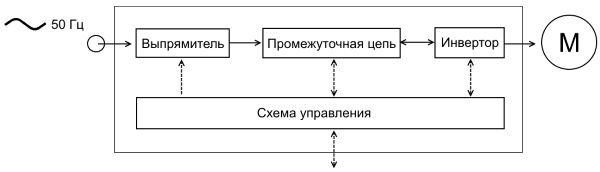
а) частоту f питающей сети. Для этого применяют машинные и полупроводниковые (тиристорные) преобразователи;
б) изменяя число пар полюсов(ступенчатое регулирование).
При p=1;2;3;… n1=3000, 1500, 1000 об / мин.
Габариты и стоимость двигателя возрастают.
в) скольжение можно изменять только в асинхронном двигателе с фазным ротором.
Ответ10 : При прямом пуске АД ток потребляемой из сети в 5-8 раз превышает номинальный ток, при этом пусковой момент мал.. Поэтому применяют различные способы уменьшения пускового тока .
1) Уменьшают напряжения питающей сети используя переключение с треугольника на звезду, используя автотрансформаторы.
2) Используют роторы в виде 2-го беличьего колеса. В момент пуска при больших токах суммарное индуктивное сопротивление ротора зависит от скольжения. С увеличением скольжения оно увеличивается, при уменьшении уменьшается. Это позволяет создавать хороший пусковой момент и уменьшать пусковой ток.
Ответ11: Пусковые свойства АД определяются следующими величинами:
Пусковым током, начальным пусковым вращающим моментом, плавностью и экономичностью пускового процесса, длительностью пуска.
Способы пуска асинхронного двигателя с короткозамкнутым ротором:
1) Прямой - непосредственное подключение к сети. При этом пусковой ток IП составляет 6÷8 Iном, пусковой момент 1÷2 Мном. Метод применим для двигателей малой и средней мощности <200квт. Частые прямые включения мощного двигателя могут привести к колебаниям энергии в силовой сети, что опасно для нее.
2) Уменьшают напряжение питающей сети используя переключение с треугольника на звезду, Метод применим для двигателей малой и средней мощности <200квт. Уменьшение напряжения на обмотках происходит в √3 раз, а пусковой ток в 3 раза.
**) Уменьшение напряжения на обмотках может уменьшать пусковой момент и он станет меньше требуемого т.е меньше момента нагрузки. Ротор просто не сможет вращаться !!!.
3) Используя регулируемые автотрансформаторы, при этом уменьшение напряжения в √2 раз вызывает уменьшение пускового тока и пускового момента в 2 раза.
4) Включают в каждую фазу по дросселю(реактору). Дроссель ограничивает пусковой ток, но одновременно уменьшается пусковой момент.
5) Используют роторы в виде двойного беличьего колеса. В таком роторе суммарное индуктивное сопротивление 2-х беличьих колес зависит от скольжения. С увеличением скольжения оно увеличивается, при уменьшении уменьшается. Это позволяет создавать хороший пусковой момент и уменьшать пусковой ток.
studfiles.net
 120о каждая. На поверхности регулятора 9 расположены неподвижная щетка 18 и подвижная щетка 19 с рукояткой 20 с возможностью перемещения на угол
120о каждая. На поверхности регулятора 9 расположены неподвижная щетка 18 и подвижная щетка 19 с рукояткой 20 с возможностью перемещения на угол  . Щетки 18 и 19 электрически соединены с цепью 5 управления тиристоров 4 выпрямителя 2. Рукоятка 20 с помощью обратной связи связана с переменной индуктивностью 21 регулятора 22 напряжения. Регулятор напряжения на выходе электрически соединен с двигателем 12 постоянного тока, а на входе - с выпрямителем 23 напряжения, выполненным по схеме Ларионова на диодах и соединенным с сетью переменного трехфазного тока. Регулятор может быть также выполнен только на полупроводниковых элементах. Все определяется технико-экономическим обоснованием. Способ регулирования осуществляется следующим образом. На выпрямители 2 и 23 подается переменный трехфазный ток, вследствие чего на регулятор 22 и двигатель 12 поступает постоянный ток и двигатель 12 начинает вращаться, сообщая вращение валу 11 электромеханического коммутатора 1, со скоростью
. Щетки 18 и 19 электрически соединены с цепью 5 управления тиристоров 4 выпрямителя 2. Рукоятка 20 с помощью обратной связи связана с переменной индуктивностью 21 регулятора 22 напряжения. Регулятор напряжения на выходе электрически соединен с двигателем 12 постоянного тока, а на входе - с выпрямителем 23 напряжения, выполненным по схеме Ларионова на диодах и соединенным с сетью переменного трехфазного тока. Регулятор может быть также выполнен только на полупроводниковых элементах. Все определяется технико-экономическим обоснованием. Способ регулирования осуществляется следующим образом. На выпрямители 2 и 23 подается переменный трехфазный ток, вследствие чего на регулятор 22 и двигатель 12 поступает постоянный ток и двигатель 12 начинает вращаться, сообщая вращение валу 11 электромеханического коммутатора 1, со скоростью  . Через выпрямитель 2 и ограничитель 6 напряжения постоянный ток поступает на щетки 2, а затем на коллектор 8, где он преобразуется в переменный трехфазный ток, и через щетки 24 поступает на клеммы 16, к которым подключается регулируемый асинхронный двигатель. При неизменной величине амплитуды переменного напряжения ток, подаваемый в статорную обмотку, формируется в виде импульсов, длительность которых регулируется обратно пропорционально изменению частоты. Согласно фиг.2
. Через выпрямитель 2 и ограничитель 6 напряжения постоянный ток поступает на щетки 2, а затем на коллектор 8, где он преобразуется в переменный трехфазный ток, и через щетки 24 поступает на клеммы 16, к которым подключается регулируемый асинхронный двигатель. При неизменной величине амплитуды переменного напряжения ток, подаваемый в статорную обмотку, формируется в виде импульсов, длительность которых регулируется обратно пропорционально изменению частоты. Согласно фиг.2  t1, t2, t3 - длительности сформированных импульсов тока, tр - промежуток времени между ними. Сумма этих величин равна периоду Т питающего тока, т.е. : Т = t1 + t2 + t3 + 2 tр. (1) При установившемся режиме имеютt1 = t2 = t3 = 3 t . (2) Чтобы поддерживать действующее значение тока в фазах статора постоянным по модулю для обеспечения постоянства магнитного потока, необходимо регулировать величину (длительность) импульса в зависимости от его частоты при нерегулируемом напряжении согласно зависимости 3I
t1, t2, t3 - длительности сформированных импульсов тока, tр - промежуток времени между ними. Сумма этих величин равна периоду Т питающего тока, т.е. : Т = t1 + t2 + t3 + 2 tр. (1) При установившемся режиме имеютt1 = t2 = t3 = 3 t . (2) Чтобы поддерживать действующее значение тока в фазах статора постоянным по модулю для обеспечения постоянства магнитного потока, необходимо регулировать величину (длительность) импульса в зависимости от его частоты при нерегулируемом напряжении согласно зависимости 3I t = I = сonst, (3) где I - действующее значение тока двигателя при = 50 Гц; I - действующее значение тока двигателя при частоте ; - частота тока в статорной обмотке;t - длительность импульса тока, подводимого к статорной обмотке. т.е. импульс тока 3It за период должен регулироваться обратно пропорционально изменению частоты тока. Регулируя длительность t импульса обратно пропорционально изменению частоты тока, изменяют и импульс тока, а следовательно, поддерживают магнитный поток постоянным. Частота преобразованного тока выражается следующей формулой: =
t = I = сonst, (3) где I - действующее значение тока двигателя при = 50 Гц; I - действующее значение тока двигателя при частоте ; - частота тока в статорной обмотке;t - длительность импульса тока, подводимого к статорной обмотке. т.е. импульс тока 3It за период должен регулироваться обратно пропорционально изменению частоты тока. Регулируя длительность t импульса обратно пропорционально изменению частоты тока, изменяют и импульс тока, а следовательно, поддерживают магнитный поток постоянным. Частота преобразованного тока выражается следующей формулой: =  (4) где - частота тока, поступившего в статорную обмотку двигателя;- скорость вращения вала 11. Длительность t импульса выражается следующей зависимостью:t =
(4) где - частота тока, поступившего в статорную обмотку двигателя;- скорость вращения вала 11. Длительность t импульса выражается следующей зависимостью:t =  (5) где
(5) где  = 120о - угол между кольцами 7;- угол между щетками 18 и 19. Тогда формула (3) для данной схемы регулятора имеет следующий вид: 3I
= 120о - угол между кольцами 7;- угол между щетками 18 и 19. Тогда формула (3) для данной схемы регулятора имеет следующий вид: 3I = I = const (6) Изменением угла от макс до 0о поворотом рукоятки 20 осуществляется перемещение штока 25 (фиг.3) обратной связи и изменение сопротивления регулятора 26, которое ведет к изменению тока в индуктивности 27. Одновременно с этим изменяется время включения цепи 5 (длительность импульса t) управления тиристоров 4 выпрямителя 2. Так как между ламелями 17 регулятора 9 длительности импульсов через 120о имеется электрический разрыв, то, когда он находится между щетками 18 и 19, цепь 5 обесточена и тиристоры 4 выключены. При изменении тока индуктивности 27 изменяется насыщенность магнитопровода и величина индуктивного элемента 28, а следоватеьно, изменяется частота включения и отключения регулятора 22 напряжения. Таким образом, регулируются напряжение и ток, поступающие на двигатель 12, вследствие чего и происходит изменение частоты вращения двигателя. В соответствии с конструкцией электромеханического коммутатора 1 и формулой (6) при изменении поворотом рукоятки 20 угла от макс до 0о частота двигателя 12 изменеятся в пределах мин - макс, а длительность импульса, а следовательно, и его величина импульса изменяется обратно пропорционально изменению частоты вращения, т.е. частоте . Таким образом, поворотом рукоятки регулируется частота вращения асинхронного двигателя при нерегулируемом напряжении.
= I = const (6) Изменением угла от макс до 0о поворотом рукоятки 20 осуществляется перемещение штока 25 (фиг.3) обратной связи и изменение сопротивления регулятора 26, которое ведет к изменению тока в индуктивности 27. Одновременно с этим изменяется время включения цепи 5 (длительность импульса t) управления тиристоров 4 выпрямителя 2. Так как между ламелями 17 регулятора 9 длительности импульсов через 120о имеется электрический разрыв, то, когда он находится между щетками 18 и 19, цепь 5 обесточена и тиристоры 4 выключены. При изменении тока индуктивности 27 изменяется насыщенность магнитопровода и величина индуктивного элемента 28, а следоватеьно, изменяется частота включения и отключения регулятора 22 напряжения. Таким образом, регулируются напряжение и ток, поступающие на двигатель 12, вследствие чего и происходит изменение частоты вращения двигателя. В соответствии с конструкцией электромеханического коммутатора 1 и формулой (6) при изменении поворотом рукоятки 20 угла от макс до 0о частота двигателя 12 изменеятся в пределах мин - макс, а длительность импульса, а следовательно, и его величина импульса изменяется обратно пропорционально изменению частоты вращения, т.е. частоте . Таким образом, поворотом рукоятки регулируется частота вращения асинхронного двигателя при нерегулируемом напряжении. www.freepatent.ru
Количество просмотров публикации Способы регулирования частоты вращения трехфазного асинхронного двигателя - 268
Регулирование частоты вращения электрических асинхронных двигателей является очень важной проблемой. Основным недостатком асинхронных двигателей является ограниченная возможность регулирования частоты вращения по сравнению с двигателями постоянного тока, которые позволяют изменять частоту вращения в очень широких пределах.
В настоящее время используются следующие основные методы регулирования частоты вращения асинхронных двигателей. Изменение частоты вращения достигается˸
а) изменением приложенного напряжения,
б) изменением числа пар полюсов,
в) изменением частоты питающей сети,
г) изменением сопротивления обмотки ротора,
д) введением в роторную цепь дополнительной ЭДС такой же частоты, как и частота обмотки ротора.
Последний способ достаточно сложен.
6.22.1. Изменение частоты вращения с помощью изменения числа пар полюсов
В соответствии с принципом действия асинхронных двигателей вращение магнитного поля статора определяется частотой питающей сети  и числом пар полюсов в соответствии с формулой
и числом пар полюсов в соответствии с формулой
 .
.
При неизменной частоте питающей сети частота вращения магнитного поля  зависит от числа пар полюсов. Частота же вращения магнитного поля определяет частоту вращения ротора.
зависит от числа пар полюсов. Частота же вращения магнитного поля определяет частоту вращения ротора.
Изменение числа пар полюсов машины можно осуществить следующим образом˸
а) изменением способа соединения статорной обмотки,
б) расположением на статоре двух или более независимых обмоток, обеспечивающих при их использовании различное число пар полюсов,
в) расположением на статоре обмоток, обеспечивающих возможность коммутации с целью получения различного числа пар полюсов.
Двигатели с изменяющимся числом пар полюсов изготавливаются с короткозамкнутым ротором, т. е. с обмоткой в форме беличьего колеса. Существует много методов изменения числа пар полюсов. Чаще всего используют метод коммутации статорной обмотки с целью изменения направления тока в различных частях каждой фазной обмотки.
Объяснить получение различного числа пар полюсов с помощью коммутации обмотки статора можно, продемонстрировав пример двух полуобмоток (рис. 6.51).

а б
Рис. 6.51
Если обмотка фазы  статора состоит из двух полуобмоток
статора состоит из двух полуобмоток  и
и  , то при их последовательном включении, когда конец полуобмотки соединен с началом полуобмотки , образуются две пары полюсов (направление токов проводников обмоток и магнитные силовые линии обмоток показаны на рис. 6.51, a). Если изменить направление тока в одной из обмоток (например в полуобмотке ), то в проводниках и
, то при их последовательном включении, когда конец полуобмотки соединен с началом полуобмотки , образуются две пары полюсов (направление токов проводников обмоток и магнитные силовые линии обмоток показаны на рис. 6.51, a). Если изменить направление тока в одной из обмоток (например в полуобмотке ), то в проводниках и  так же, как и в проводниках
так же, как и в проводниках  и
и  , токи будут протекать в одном направлении и суммарное магнитное поле будет иметь одну пару полюсов (рис. 6.51, б).
, токи будут протекать в одном направлении и суммарное магнитное поле будет иметь одну пару полюсов (рис. 6.51, б).
Примеры схем коммутации статорной обмотки с целью получения различного числа пар полюсов приведены на рис. 6.52, a, б. В первом случае обмотки статора соединены треугольником. При этом обмотки каждой фазы состоят из двух полуобмоток, расположенных в статоре со сдвигом в пространстве на 180 °. С помощью аппаратов управления полуобмотки каждой фазы включаются параллельно по схеме ʼʼзвездаʼʼ. Трехфазное напряжение при этом подводится к средней точке каждой обмотки, и направление тока в половинах каждой из фазных обмоток меняется на противоположное, обеспечивая большее количество пар полюсов.
referatwork.ru