





Поскольку синхронный двигатель имеет в синхронном режиме одну рабочую скорость, то пуск этих двигателей осуществляется в асинхронном режиме. Для этого в конструкции ротора предусмотрена короткозамкнутая обмотка, конструкция которой аналогична клетке ротора асинхронного короткозамкнутого двигателя. Поэтому при разгоне до подсинхронной скорости двигатель работает как асинхронный короткозамкнутый с механической характеристикой 2 (см.рис.4.24). По достижении подсинхронной скорости, которая должна быть не менее, чем 0,95 , в обмотку возбуждения подается постоянный ток, и двигатель втягивается в синхронизм, переходя на работу в точкеб, соответствующей синхронному режиму.
, в обмотку возбуждения подается постоянный ток, и двигатель втягивается в синхронизм, переходя на работу в точкеб, соответствующей синхронному режиму.
При работе в установившемся режиме с синхронной скоростью ток в пусковой клетке не протекает. Пусковая клетка ротора рассчитывается на кратковременный режим работы, и длительная (свыше 20-30с) работа в асинхронном режиме недопустима.
Кроме обеспечения режима пуска, пусковая клетка играет роль демпферной обмотки, стабилизируя переходные процессы при работе двигателя в синхронном режиме.
Синхронные двигатели промышленного назначения имеют электромагнитное возбуждение от независимого источника постоянного тока, в качестве которых используются: генераторы постоянного тока (возбудители), которые могут располагаться на одном валу с синхронным двигателем (рис.4.27а) или приводиться во вращение отдельным двигателем (рис.4.27б), тиристорные управляемые выпрямители, которые могут получать питание от промышленной сети (рис.4.27в), либо от специального генератора переменного тока, располагаемого на одном валу с синхронным двигателем. В последнем случае (рис.4.27г) полупроводниковые выпрямители располагаются на роторе синхронной машины (система с вращающимися выпрямителями), вследствие чего не требуются щетки и кольца для подвода тока к обмотке возбуждения, т.е. синхронная машина становится бесконтактной.
Во время разгона, когда двигатель работает в асинхронном режиме, возбудитель может быть подключен к обмотке ротора при снятом напряжении возбудителя (схема с глухоподключенным возбудителем), а может быть отключен от обмотки возбуждения контактором КМ (см., например, схемы рис.4.22 и 4.27). В последнем случае обмотка возбуждения замыкается на сопротивление или замыкается накоротко. Оставлять концы обмотки возбуждения во время разгона разомкнутыми нельзя, т.к. в обмотке при больших скольжениях наводится значительная э.д.с. скольжения.

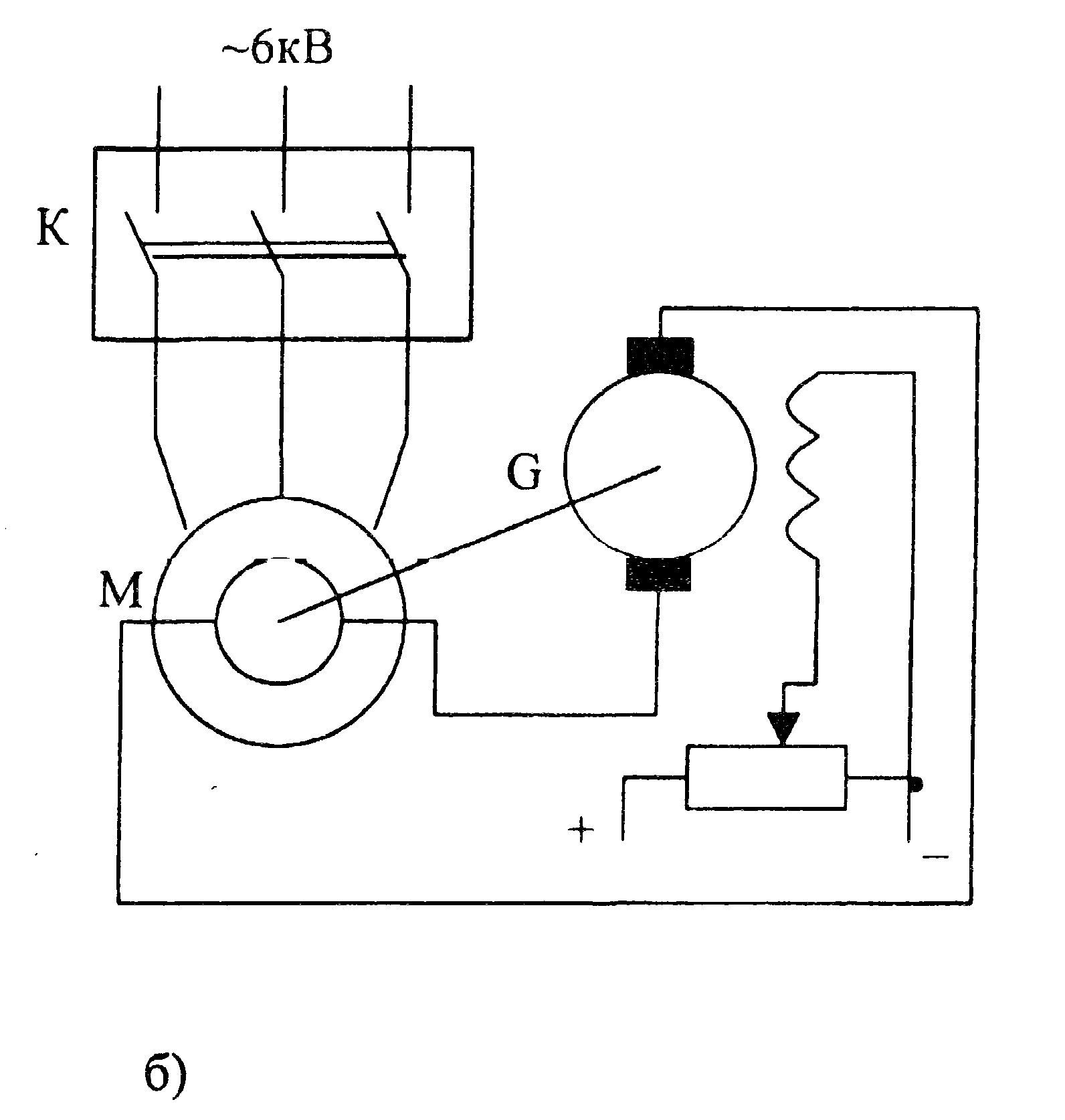


Рис.4.27. Схемы возбуждения синхронного двигателя
При использовании в качестве возбудителя тиристорного преобразователя или вращающихся выпрямителей во время пуска обмотка возбуждения закорачивается через шунтирующие тиристоры.
Рассмотрим схему 4.27в. При пуске двигателя в асинхронном режиме напряжение тиристорного преобразователя UD равно нулю. В обмотке возбуждения индуктируется переменная э.д.с. скольжения, под действием которой через стабилитроны VD открываются вспомогательные тиристоры VS, и обмотка возбуждения закорачивается на разрядное сопротивление R. Когда двигатель достигает подсинхронной скорости, э.д.с. скольжения становится малой, стабилитроны запираются и тиристоры VS отключают разрядное сопротивление, после чего в обмотку возбуждения подается постоянный ток от преобразователя UD.
В последние годы получили распространение возбудители, встроенные в конструкцию синхронной машины (рис.4.27г). Возбудитель состоит из синхронного генератора G, ротор которого расположен на валу синхронного двигателя М, неуправляемых выпрямителей, вспомогательных тиристоров и разрядных сопротивлений, также размещенных на валу синхронного двигателя. Регулирование тока возбуждения производится изменением тока возбуждения возбудителя G. По достижении подсинхронной скорости цепи, шунтирующие обмотку возбуждения, размыкаются и в обмотку подается постоянный ток, после чего двигатель втягивается в синхронизм, его скорость достигает синхронной, и в дальнейшем он работает в синхронном режиме.
studfiles.net
 Режимы работы и устройство асинхронной машины
Режимы работы и устройство асинхронной машины
 Магнитная цепь асинхронной машины
Магнитная цепь асинхронной машины
 Рабочий процесс трехфазного асинхронного двигателя
Рабочий процесс трехфазного асинхронного двигателя
 Электромагнитный момент и рабочие характеристики асинхронного двигателя
Электромагнитный момент и рабочие характеристики асинхронного двигателя
 Опытное определение параметров и расчет рабочих характеристик асинхронных двигателей
Опытное определение параметров и расчет рабочих характеристик асинхронных двигателей
 Пуск и регулирование частоты вращения трехфазных асинхронных двигателей
Пуск и регулирование частоты вращения трехфазных асинхронных двигателей
 Асинхронные машины специального назначения
Асинхронные машины специального назначения
 Основные типы серийно выпускаемых асинхронных двигателей
Основные типы серийно выпускаемых асинхронных двигателей
Асинхронные машины получили наиболее широкое применение в современных электрических установках и являются самым распространенным видом бесколлекторных электрических машин переменного тока. Как и любая электрическая машина, асинхронная машина обратима и может работать как в генераторном, так и в двигательном режимах. Однако преобладающее применение имеют асинхронные двигатели, составляющие основу современного электропривода. Области применения асинхронных двигателей весьма широкие — от привода устройств автоматики и бытовых электроприборов до привода крупного горного оборудования (экскаваторов, дробилок, мельниц и т. п.). В соответствии с этим мощность асинхронных двигателей, выпускаемых электромашиностроительной промышленностью, составляет диапазон от долей ватт до тысяч киловатт при напряжении питающей сети от десятков вольт до 10 кВ. Наибольшее применение имеют трехфазные асинхронные двигатели, рассчитанные на работу от сети промышленной частоты (50 Гц). Асинхронные двигатели специального применения изготовляются на повышенные частоты переменного тока (200, 400 Гц и более). Основное внимание в данном разделе уделено изучению трехфазных асинхронных двигателей общего применения. Но в конце раздела рассмотрены однофазные и конденсаторные (двухфазные) асинхронные двигатели, а также двигатели специального назначения — линейные, исполнительные и др.
• Режим работы и устройство асинхронной машины
В соответствии с принципом обратимости электрических машин (см. § В.2) асинхронные машины могут работать как в двигательном, так и в генераторном режимах. Кроме того, возможен еще и режим электромагнитного торможения противовключением.
Двигательный режим. Принцип действия трехфазного асинхронного двигателя рассмотрен в § 6.2. При включении обмотки статора в сеть трехфазного тока возникает вращающееся магнитное поле, которое, сцепляясь с короткозамкнутой обмоткой ротора, наводит в ней ЭДС. При этом в стержнях обмотки ротора появляются токи (см. рис. 6.4). В результате взаимодействия этих токов с вращающимся магнитным полем на роторе возникают электромагнитные силы. Совокупность этих сил создает электромагнитный вращающий момент, под действием которого ротор асинхронного двигателя приходит во вращение с частотой n2 < n1 в сторону вращения поля статора. Если вал асинхронного двигателя механически соединить с валом какого-либо исполнительного механизма ИМ (станка, подъемного крана и т. п.), то вращающий момент двигателя М, преодолев противодействующий (нагрузочный) момент Мнагр, исполнительного механизма, приведет механизм во вращение. Следовательно, электрическая мощность Р1, поступающая в двигатель из сети, в основной своей части преобразуется в механическую мощность Р1 и передается исполнительному механизму ИМ (рис. 10.1, б).
Весьма важным параметром асинхронной машины является скольжение — величина, характеризующая разность частот вращения ротора и вращающегося поля статора:
S = (n1 – n2)/ n1 (10.1)
Скольжение выражают в долях единицы либо в процентах. В последнем случае величину, полученную по (10.1), следует умножить на 100.
Вполне очевидно, что с увеличением нагрузочного момента на валу асинхронного двигателя частота вращения ротора n2уменьшается. Следовательно, скольжение асинхронного двигателя зависит от механической нагрузки на валу двигателя и может изменяться в диапазоне 0 <s ≤ 1.
При включении асинхронного двигателя в сеть в начальный момент времени ротор под влиянием сил инерции неподвижен (n2= 0). При этом скольжение s равно единице.

Рис. 10.1. Режимы работы асинхронной машины
В режиме работы двигателя без нагрузки на валу (режим холостого хода) ротор вращается с частотой лишь немного меньшей синхронной частоты вращения n1 и скольжение весьма мало отличается от нуля (s ≈ 0). Скольжение, соответствующее номинальной нагрузке двигателя, называют номинальным скольжением shom. Для асинхронных двигателей общего назначения shom = 1 8%, при этом для двигателей большой мощностиsном = 1%, а для двигателей малой мощности sном = 8%.
8%, при этом для двигателей большой мощностиsном = 1%, а для двигателей малой мощности sном = 8%.
Преобразовав выражение (10.1), получим формулу для определения асинхронной частоты вращения (об/мин):
n2 = n1(1-s). (10.2)
Пример 10.1. Трехфазный асинхронный двигатель с числом полюсов 2р = 4 работает от сети с частотой тока f1 = 50 Гц. Определить частоту вращения двигателя при номинальной нагрузке, если скольжение при этом составляет 6%.
Решение. Синхронная частота вращения по (6.3)
n1 = f1 60/ р = 50 • 60/4 = 1500 об/мин.
Номинальная частота вращения по (10.2)
nном = n1(1 - sном ) = 1500(1 - 0,06) = 1412 об/мин.
Генераторный режим. Если обмотку статора включить в сеть, а ротор асинхронной машины посредством приводного двигателя ПД (двигатель внутреннего сгорания, турбина и т. п.), являющегося источником механической энергии, вращать в направлении вращения магнитного поля статора с частотой n2 > n1, то направление движения ротора относительно поля статора изменится на обратное (по сравнению с двигательным режимом работы пой машины), так как ротор будет обгонять поле статора. При этом скольжение станет отрицательным, а ЭДС, наведенная в обмотке ротора, изменит свое направление. Электромагнитный момент на роторе М также изменит свое направление, т. е. будет направлен встречно вращающемуся магнитному полю статора и станет тормозящим по отношению к вращающемуся моменту приводного двигателя М1 (рис. 10.1, а). В этом случае механическая мощность приводного двигателя в основной своей части будет преобразована в электрическую активную мощность Р2 переменного тока. Особенность работы асинхронного генератора состоит в том, что вращающееся магнитное поле в нем создается реактивной мощностью Q трехфазной сети, в которую включен генератор и да он отдает вырабатываемую активную мощность Р2. Следовательно, для работы асинхронного генератора необходим источник переменного тока, при подключении к которому происходит возбуждение генератора, т. е. в нем возбуждается вращающееся магнитное поле.
Скольжение асинхронной машины в генераторном режиме может изменяться в диапазоне - ∞ < s < 0, т. е. оно может принимать любые отрицательные значения.
Режим торможения противовключением. Если у работающего трехфазного асинхронного двигателя поменять местами любую пару подходящих к статору из сети присоединительных проводов, то вращающееся поле статора изменит направление вращения на обратное. При этом ротор асинхронной машины под действием сил инерции будет продолжать вращение в прежнем правлении. Другими словами, ротор и поле статора асинхронной машины будут вращаться в противоположных направлениях. В этих условиях электромагнитный момент машины, направленный в сторону вращения поля статора, будет оказывать на ротор тормозящее действие (рис. 10.1, в). Этот режим работы асинхронной машиины называется электромагнитным торможением противовключением. Активная мощность, поступающая из сети в машину при этом режиме, частично затрачивается на компенсацию механической мощности вращающегося ротора, т. е. на его торможение.
В режиме электромагнитного торможения частота вращения ротора является отрицательной, а поэтому скольжение приобретает положительные значения больше единицы:
s = [n1 - (- n2)] / n1 = (n1 + n2) /n1 > 1. (10.3)
Скольжение асинхронной машины в режиме торможения противовключением может изменяться в диапазоне 1 < s < + ∞ , т. е. оно может принимать любые положительные значения больше единицы.
Обобщая изложенное о режимах работы асинхронной машины, можно сделать вывод: характерной особенностью работы асинхронной машины является неравенство частот вращения магнитного поля статора n1 и ротора n2, т. е. наличие скольжения, так как только в этом случае вращающееся магнитное поле наводит в обмотке ротора ЭДС и на роторе возникает электромагнитный момент. При этом каждому режиму работы асинхронной машины соответствует определенный диапазон изменений скольжения, а следовательно, и частоты вращения ротора.
Из рассмотренных режимов работы наибольшее практическое применение получил двигательный режим асинхронной машины, т. е. чаще используют асинхронные двигатели, которые составляют основу современного электропривода, выгодно отличаясь от других электродвигателей простотой конструкции и высокой надежностью. Поэтому теорию асинхронных машин принято излагать применительно к асинхронным двигателям.
studfiles.net
Исполнительный механизм (станок, вентилятор, транспортное средство и т. п.) приводится в движение посредством двигателя. Установившийся режим работы агрегата наступает при такой скорости (скольжении) двигателя, при которой его электромагнитный момент М уравновешивает момент статического сопротивления:
Мс=( М2 + М0)
М2 — тормозной момент исполнительного механизма; М0— тормозной момент, обусловленный механическими и магнитными потерями внутри двигателя.
В установившемся режиме скорость двигателя и механизма остается неизменной во времени. Если равенство М= Мс нарушается, то происходит изменение скорости в соответствии с известным из механики уравнением движения
М - Мс=Jdω/dt, (3.12)
где составляющая Jdω/dt называется динамическим моментом (J– момент инерции вращающихся частей двигателя и механизма).
Из (3.12) следует: 1) при М>МСбудет происходить разгон агрегата;
2) при М<МСбудет происходить замедление двигателя и сочленённого с ним производственного механизма.
Скорость, соответствующую установившемуся режиму, графически можно определить по точке пересечения механических характеристик ω = f(M) и ω = f(Мс).Если механические характеристики построены в функции скольжения M=f(s) и Мс=f(s), то точка их пересечения определит установившееся значение скольжения.
Точки, соответствующие установившимся значениям скорости или скольжения, могут соответствовать устойчивому или неустойчивому равновесию. Это будет зависетьот вида механических характеристик. Равновесие будет устойчивым, если после прекращения кратковременных возмущений (например, изменения нагрузки, напряжения и т. д.), выводящих систему из равновесия, она вновь возвращается в исходную точку. В противном случае равновесие будет неустойчивым.
Для примера на рис. 3.4 изображены характеристики M=f(s) и Мс=f(s).
Рис. 3.4. Определение устойчивого равновесия
Равенство моментов здесь наступает при трех значениях скольжения. Точка при скольжении s' является точкой неустойчивого равновесия. Действительно, если случайно скольжение увеличится (s> s'), то разность моментов М — Мс<0, что приведет к еще большему увеличению скольжения и привод перейдет на работу при скольжении s''. При случайном уменьшении скольжения возникает положительная разность моментов, стремящаяся еще больше уменьшить скольжение, и привод будет работать со скольжением s. Таким образом, при нарушении равновесия привод не будет возвращаться в исходную точку, а будет все больше и больше удаляться от нее.
Аналогичным путем можно показать, что точки со скольжением s и s" являются точками устойчивого равновесия, так как при случайных отклонениях возникает избыточный момент, стремящийся вернуть систему в исходную точку.
Работа при скольжениях s", близких к 1, будет протекать с большими токами и низким КПД, поэтому чаще всего механические характеристики двигателя и исполнительного механизма выбирают так, чтобы единственная устойчивого их равновесия располагалась на линейной части характеристики M=f(s) при небольших скольжениях.
В общем случае критерием устойчивости является выполнение неравенств

или 
poznayka.org
В соответствии с принципом обратимости электрических машин (см. § В.2) асинхронные машины могут работать как в двигательном, так и в генераторном режимах. Кроме того, возможен еще и режим электромагнитного торможения противовключением.
Двигательный режим.Принцип действия трехфазного асинхронного двигателя рассмотрен в § 6.2. При включении обмотки статора в сеть трехфазного тока возникает вращающееся магнитное поле, которое, сцепляясь с короткозамкнутой обмоткой ротора, наводит в ней ЭДС. При этом в стержнях обмотки ротора появляются токи (см. рис. 6.4). В результате взаимодействия этих токов с вращающимся магнитным полем на роторе возникают электромагнитные силы. Совокупность этих сил создает электромагнитный вращающий момент, под действием которого ротор асинхронного двигателя приходит во вращение с частотой n2 < n1 в сторону вращения поля статора. Если вал асинхронного двигателя механически соединить с валом какого-либо исполнительного механизма ИМ (станка, подъемного крана и т. п.), то вращающий момент двигателя М, преодолев противодействующий (нагрузочный) момент Мнагр, исполнительного механизма, приведет механизм во вращение. Следовательно, электрическая мощность Р1, поступающая в двигатель из сети, в основной своей части преобразуется в механическую мощность Р1 и передается исполнительному механизму ИМ (рис. 10.1, б).
Весьма важным параметром асинхронной машины является скольжение — величина, характеризующая разность частот вращения ротора и вращающегося поля статора:
S = (n1 – n2)/ n1(10.1)
Скольжение выражают в долях единицы либо в процентах. В последнем случае величину, полученную по (10.1), следует умножить на 100.
Вполне очевидно, что с увеличением нагрузочного момента на валу асинхронного двигателя частота вращения ротора n2 уменьшается. Следовательно, скольжение асинхронного двигателя зависит от механической нагрузки на валу двигателя и может изменяться в диапазоне 0 < s≤1.
При включении асинхронного двигателя в сеть в начальный момент времени ротор под влиянием сил инерции неподвижен (n2= 0). При этом скольжение sравно единице.

Рис. 10.1. Режимы работы асинхронной машины
В режиме работы двигателя без нагрузки на валу (режим холостого хода) ротор вращается с частотой лишь немного меньшей синхронной частоты вращения n1и скольжение весьма мало отличается от нуля (s ≈ 0). Скольжение, соответствующее номинальной нагрузке двигателя, называют номинальным скольжениемshom.Для асинхронных двигателей общего назначенияshom= 1  8%, при этом для двигателей большой мощности sном = 1%, а для двигателей малой мощности sном=8%.
8%, при этом для двигателей большой мощности sном = 1%, а для двигателей малой мощности sном=8%.
Преобразовав выражение (10.1), получим формулу для определения асинхронной частоты вращения (об/мин):
n2 = n1(1-s). (10.2)
Генераторный режим.Если обмотку статора включить в сеть, а ротор асинхронной машины посредством приводного двигателя ПД (двигатель внутреннего сгорания, турбина и т. п.), являющегося источником механической энергии, вращать в направлении вращения магнитного поля статора с частотой n2 > n1, то направление движения ротора относительно поля статора изменится на обратное (по сравнению с двигательным режимом работы пой машины), так как ротор будет обгонять поле статора. При этом скольжение станет отрицательным, а ЭДС, наведенная в обмотке ротора, изменит свое направление. Электромагнитный момент на роторе М также изменит свое направление, т. е. будет направлен встречно вращающемуся магнитному полю статора и станет тормозящим по отношению к вращающемуся моменту приводного двигателя М1 (рис. 10.1, а). В этом случае механическая мощность приводного двигателя в основной своей части будет преобразована в электрическую активную мощность Р2 переменного тока. Особенность работы асинхронного генератора состоит в том, что вращающееся магнитное поле в нем создается реактивной мощностью Q трехфазной сети, в которую включен генератор и да он отдает вырабатываемую активную мощность Р2. Следовательно, для работы асинхронного генератора необходим источник переменного тока, при подключении к которому происходит возбуждение генератора, т. е. в нем возбуждается вращающееся магнитное поле.
Скольжение асинхронной машины в генераторном режиме может изменяться в диапазоне - ∞ < s < 0, т. е. оно может принимать любые отрицательные значения.
Режим торможения противовключением.Если у работающего трехфазного асинхронного двигателя поменять местами любую пару подходящих к статору из сети присоединительных проводов, то вращающееся поле статора изменит направление вращения на обратное. При этом ротор асинхронной машины под действием сил инерции будет продолжать вращение в прежнем правлении. Другими словами, ротор и поле статора асинхронной машины будут вращаться в противоположных направлениях. В этих условиях электромагнитный момент машины, направленный в сторону вращения поля статора, будет оказывать на ротор тормозящее действие (рис. 10.1, в). Этот режим работы асинхронной машиины называется электромагнитным торможением противовключением. Активная мощность, поступающая из сети в машину при этом режиме, частично затрачивается на компенсацию механической мощности вращающегося ротора, т. е. на его торможение.
В режиме электромагнитного торможения частота вращения ротора является отрицательной, а поэтому скольжение приобретает положительные значения больше единицы:
s = [n1 - (- n2)] / n1 = (n1 + n2) /n1 > 1. (10.3)
Скольжение асинхронной машины в режиме торможения противовключением может изменяться в диапазоне 1 < s<+ ∞ , т. е. оно может принимать любые положительные значения больше единицы.
Обобщая изложенное о режимах работы асинхронной машины, можно сделать вывод: характерной особенностью работы асинхронной машины является неравенство частот вращения магнитного поля статора n1и ротора n2, т. е. наличие скольжения, так как только в этом случае вращающееся магнитное поле наводит в обмотке ротора ЭДС и на роторе возникает электромагнитный момент. При этом каждому режиму работы асинхронной машины соответствует определенный диапазон изменений скольжения, а следовательно, и частоты вращения ротора.
Из рассмотренных режимов работы наибольшее практическое применение получил двигательный режим асинхронной машины, т. е. чаще используют асинхронные двигатели, которые составляют основу современного электропривода, выгодно отличаясь от других электродвигателей простотой конструкции и высокой надежностью. Поэтому теорию асинхронных машин принято излагать применительно к асинхронным двигателям.
mykonspekts.ru










