





Схема пуска двигателя постоянного тока с независимым возбуждением по принципу времени
Эта схема представлена на рис. 1.1, а. Она содержит кнопки управления SB1 (пуск) и SB2 (останов) двигателя, линейный контактор КМ1, обеспечивающий подключение двигателя к сети, и контактор ускорения КМ2 для шунтирования пускового резистора Rд. В качестве датчика времени в схеме используется электромагнитное реле времени КТ. При подключении схемы к источнику напряжения U происходит возбуждение двигателя и срабатывает реле КТ, размыкая свой размыкающий контакт в цепи катушки контактора КМ2 и подготавливая двигатель к пуску.
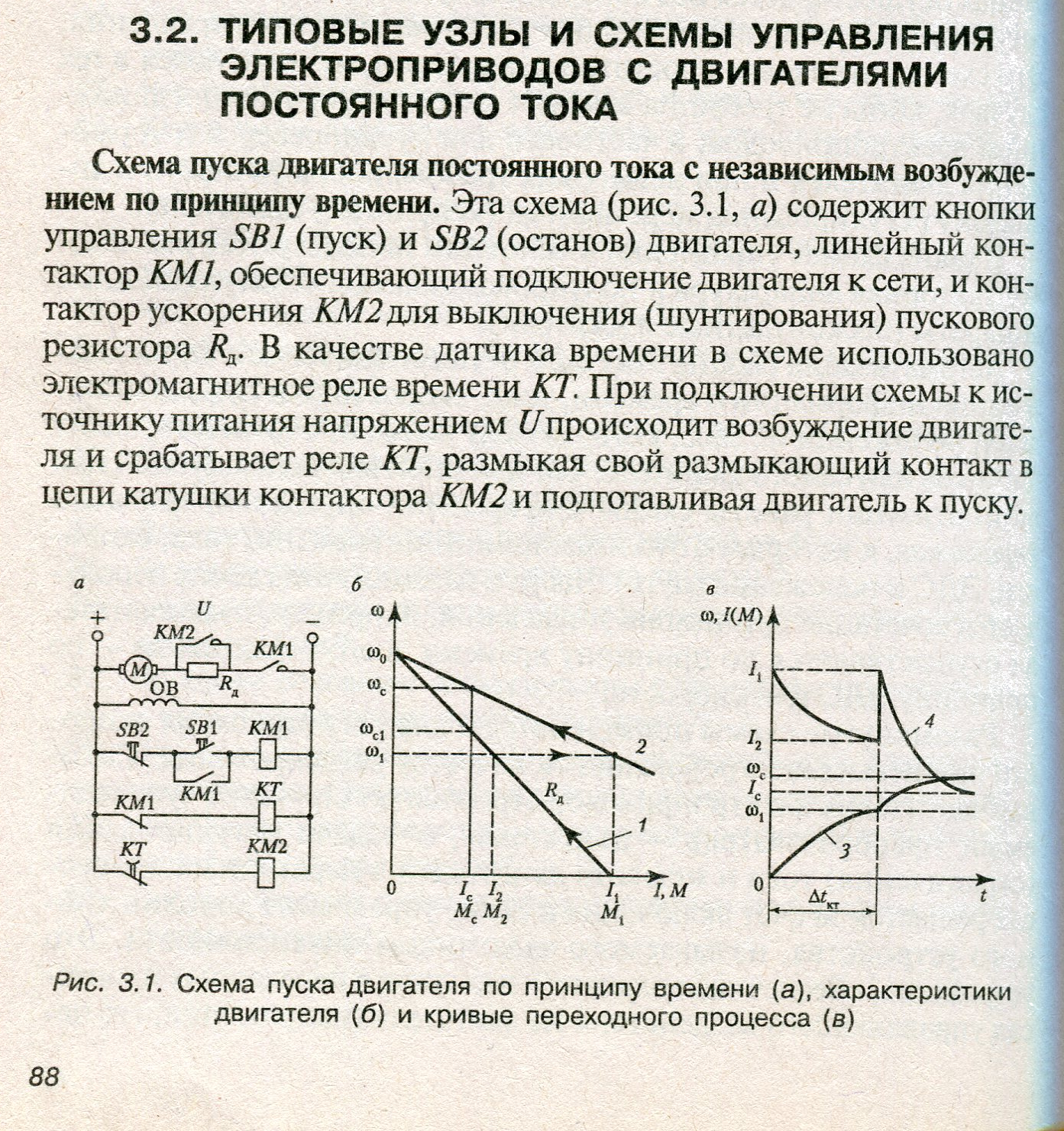
Рис. 1.1. Схема пуска двигателя по принципу времени (а), характеристики двигателя (б) и кривые переходного процесса (в)
Пуск двигателя начинается после нажатия кнопки SВ1, в результате чего получает питание контактор КМ1, который своим главным силовым контактом подключает двигатель к источнику питания. Двигатель начинает разбег с резистором Rд в цепи якоря, с помощью которого ограничивается пусковой ток двигателя. Одновременно замыкающий блок-контакт контактора КМ1 шунтирует кнопку SВ1, и она может быть отпущена, а размыкающий блок-контакт КМ1 разрывает цепь питания катушки реле времени КТ. Через интервал времени Δtк.т после прекращения питания катушки реле времени, называемый выдержкой времени, размыкающий контакт КТ замкнется в цепи катушки контактора КМ2, последний включится и главным контактом закоротит пусковой резистор Rд в цепи якоря. Таким образом, при пуске двигатель в течение времени Δtк.т разгоняется по искусственной характеристике 1 (рис. 1.1, б), а после шунтирования резистора Rд – по естественной 2. Значение сопротивления резистора Rд выбирается таким образом, чтобы в момент включения двигателя ток I1 в цепи и соответственно момент М1, не превосходили бы допустимого уровня.
За время Δtк.т после начала пуска частота вращения двигателя достигает значения ω1, а ток в цепи якоря снижается до уровня I2 (рис. 1, в). После шунтирования Rд, происходит бросок тока в цепи якоря от I2 до I1 который не превышает допустимого уровня. Изменение частоты вращения, тока и момента во времени происходит по экспоненте.
Останов двигателя осуществляется нажатием кнопки SВ2, что приведет к отключению якоря двигателя от источника питания и его торможению под действием момента сопротивления на валу. Такой способ останова двигателя получил название «торможение выбегом».
Схема пуска двигателя в две ступени по принципу ЭДС и динамического торможения по принципу времени.
В этой схеме (рис. 1.2, а) в качестве датчика ЭДС использован якорь двигателя, к которому подключены катушки контакторов ускорения КМ1 и КМ2, обеспечивающих шунтирование пусковых резисторов Rд1 и Rд2. С помощью регулировочных резисторов Rу1, и Rу2 , которые могут быть настроены на срабатывание при определенных частотах вращения двигателя.

Рис. 1.2. Схема пуска двигателя по принципу ЭДС и динамического торможения по принципу времени (а) и характеристики двигателя (б)
Для осуществления торможения в схеме предусмотрен резистор R3, подключение и отключение которого осуществляется контактором торможения КМЗ. Для обеспечения выдержки времени используется электромагнитное реле времени КТ, размыкающий контакт которого включен в цепь катушки контактора торможения КМ2.
После подключения схемы к источнику питания происходит возбуждение двигателя, а аппараты схемы остаются в исходном положении. Пуск двигателя осуществляется нажатием кнопки SВ1, что приводит к срабатыванию линейного контактора КМ и подключению двигателя к источнику питания. Двигатель начинает разбег с включенными резисторами Rд1 + Rд2 в цепи якоря по характеристике 1 (рис. 1.2, б). По мере увеличения частоты вращения двигателя растет его ЭДС и соответственно напряжение на катушках контакторов КМ1 и КМ2. При частоте вращения ω1 срабатывает контактор КМ1, закорачивая своим контактом первую ступень пускового резистора Rд1, и двигатель переходит на характеристику 2. При частоте вращения ω2 срабатывает контактор КМ2,шунтируя своим контактом вторую ступень пускового резистора Rд2. Двигатель переходит на естественную характеристику 3 и заканчивает свой разбег в точке установившегося режима с координатами ωс – Мс, определяемой пересечением естественной характеристики 3 двигателя и характеристики нагрузки.
Для перехода к режиму торможения нажимается кнопка SB2. Катушка контактора КМ теряет питание, размыкается замыкающий силовой контакт КМ в цепи якоря двигателя, и он отключается от источника питания. Размыкающий блок-контакт КМ3 замыкается, последний срабатывает и своим главным контактом подключает резистор Rд3 к якорю М, переводя двигатель в режим динамического торможения по характеристике 4 (рис. 1.2, б). Одновременно размыкается замыкающий контакт контактора КМ в цепи реле времени КТ, оно теряет питание и начинает отсчет времени. Через интервал времени, который соответствует снижению частоты вращения двигателя до нуля, реле времени отключается и своим контактом разрывает цепь питания контактора КМЗ. Резистор Rд3 отключается от якоря М двигателя, торможение заканчивается, и схема возвращается в свое исходное положение.
Применение динамического торможения обеспечивает более быстрый останов двигателя и тем самым быстрое прекращение движения исполнительного органа рабочей машины.
Схема пуска двигателя в одну ступень по принципу времени и динамического торможения по принципу ЭДС.
Управление двигателем при пуске происходит по аналогии со схемой рис. 1.1. При включении двигателя в этой схеме (рис. 1.3) и работе от источника питания размыкающий контакт линейного контактора КМ в цепи контактора торможения КМ2 разомкнут, что предотвращает перевод двигателя в режим торможения.

Рис. 1.3. Схема пуска двигателя по принципу времени и динамического торможения по принципу ЭДС
Торможение осуществляется нажатием кнопки SВ2. Контактор КМ, потеряв питание, отключает якорь двигателя от источника питания и замыкает своим контактом цепь питания катушки контактора КМ2. Последний от действия наведенной в якоре ЭДС срабатывает и замыкает якорь М на резистор торможения Rд1. Процесс динамического торможения происходит до тех пор, пока при небольшой частоте вращения двигателя его ЭДС не станет меньше напряжения отпускания контактора КМ2, который отключится, и схема вернется в исходное положение.
Схема управления пуском двигателя по принципу времени, реверсом и торможением противовключением по принципу ЭДС
В этой схеме (рис. 1.4, а) предусмотрено два линейных контактора КМ1 и КМ2, обеспечивающих его вращение соответственно в условных направлениях «Вперед» и «Назад». Главные контакты этих аппаратов образуют реверсивный контактный мостик, с помощью которого можно изменить полярность напряжения на якоре М и тем самым осуществлять торможение противовключением и реверс (изменение направления вращения) двигателя. В якорной цепи помимо пускового резистора Rд1 включен резистор противовключения Rд2, который управляется контактором противовключения КМЗ.

Рис. 1.4. Схема управления пуском и реверсом двигателя (а) и характеристики двигателя (б)
Управление двигателем при торможении противовключением и реверсе осуществляется с помощью двух реле противовключения КV1 и КV2. Их назначение в том, чтобы в режиме противовключения для ограничения тока в якоре до допустимого уровня обеспечить ввод в цепь якоря в дополнение к пусковому резистору Rд1, резистор противовключения Rд2, что достигается выбором точки присоединения катушек реле КV1 и КV2 к резистору (Rд1 + Rд2).
Пуск двигателя в любом направлении осуществляется в одну ступень в функции времени. При нажатии, например, кнопки SВ1 срабатывает контактор КМ1 и подключает якорь М к источнику питания. За счет падения напряжения на резисторе Rд1, от пускового тока срабатывает реле времени КТ, размыкающее свой контакт в цепи контактора КМ.
Включение КМ1 приведет также к срабатыванию реле КV1, которое замкнет свой замыкающий контакт в цепи контактора противовключения КМЗ. Это вызовет включение КМЗ, что приведет к закорачиванию ненужного при пуске резистора противовключения Rд2 и одновременно катушки реле времени КТ. Двигатель начнет разбег по характеристике 2 (рис. 1.4, б), а реле времени КТ – отсчет выдержки времени.
По истечении выдержки времени реле КТ замкнет свой контакт в цепи катушки контактора КМ, он включится, закоротит пусковой резистор Rд1 и двигатель выйдет на свою естественную характеристику 1.
Для осуществления торможения нажимается кнопка SВ2, в результате чего отключаются контактор КМ1, реле КV1, контакторы КМЗ и КМ4 и включается контактор КМ2. Напряжение на якоре двигателя изменяет свою полярность, и двигатель переходит в режим торможения противовключением с двумя резисторами в цепи якоря Rд1 и Rд2. Несмотря на замыкание контакта КМ2 в цепи реле КV2, оно в результате оговоренной выше настройки не включается и тем самым не дает включиться аппаратам КМЗ и КМ4 и зашунтировать резисторы Rд1 и Rд2.
Перевод двигателя в режим противовключения соответствует его переходу с естественной характеристики 1 на искусственную характеристику 4 (рис. 1.4, б). Во всем диапазоне частот вращения 0 < ω < ω0 на этой характеристике двигатель работает в режиме противовключения.
По мере снижения частоты вращения двигателя растет напряжение на катушке реле КV2, и при частоте вращения, близкой к нулю, оно достигнет напряжения срабатывания. Если к этому моменту времени кнопка SВ2 будет отпущена, то отключается контактор КМ2, схема возвращается в исходное положение и на этом процесс торможения заканчивается.
Если же при достижении малой частоты вращения кнопка SВ2 остается нажатой, то включается реле КV2 и процесс пуска двигателя повторяется, но уже в противоположную сторону. Таким образом, реверсирование двигателя включает в себя два этапа: торможение противовключением и пуск в противоположном направлении. Второй этап реверса изображен на рис. 1.4, б переходом двигателя с характеристики 4 на характеристику 3, соответствующую обратной полярности напряжения на якоре двигателя и наличию в якоре добавочного резистора Rд1.
Схема пуска двигателя постоянного тока с последовательным возбуждением по принципу тока
В этой схеме (рис. 1.5) используется реле тока КА, катушка которого включена в цепь якоря М, а размыкающий контакт – в цепь питания контактора ускорения КМ2. Реле тока настраивается таким образом, чтобы его ток отпускания соответствовал току I2 (см. рис. 1.1, б). В схеме используется также дополнительное блокировочное реле КV с временем срабатывания большим, чем у реле КА.

Рис. 1.5. Схема пуска двигателя по принципу тока
Работа схемы при пуске происходит следующим образом. После нажатия на кнопку SВ1 срабатывает контактор КМ1, двигатель подключается к источнику питания и начинает свой разбег. Бросок тока в якорной цепи после замыкания главного контакта контактора КМ1 вызовет срабатывание реле тока КА, которое разомкнет свой размыкающий контакт в цепи контактора КМ2. Через некоторое время после этого срабатывает КV и замыкает свой замыкающий контакт в цепи контактора КМ2, подготавливая его к включению.
По мере разбега двигателя ток якоря снижается до значения тока переключения I2. При этом токе отключается реле тока и замыкает свой размыкающий контакт в цепи катушки контактора КМ2. Последний срабатывает, его главный контакт закорачивает пусковой резистор Rд, в цепи якоря, а вспомогательный контакт шунтирует контакт реле тока КА. Поэтому вторичное включение реле тока КА после закорачивания Rд и броска тока не вызовет отключения контактора КМ2 и двигатель продолжит разбег по своей естественной характеристике.
Схема типовой панели управления двигателем, обеспечивающая пуск, динамическое торможение и регулирование частоты вращения ослаблением магнитного потока
Типовые релейно-контакторные схемы управления ЭП содержат элементы блокировок, защит, сигнализации, а также связи с технологическим оборудованием. Для унификации схемных решений электротехническая промышленность выпускает стандартные станции, блоки и панели управления, специализированные по видам ЭП рабочих механизмов, функциональным возможностям, условиям эксплуатации, роду тока и т.д. Ниже в качестве примера рассмотрена схема одного из таких типовых устройств (рис. 1.6).

Рис. 1.6. Схема типовой панели управления двигателем
Органом управления в этой схеме является командоконтроллер SА, имеющий четыре положения рукоятки: одно нулевое (начальное) и три рабочих (см. рис. 1.6). Пуск двигателя осуществляется в три ступени по принципу времени, торможение – динамическое по принципу ЭДС.
Перед пуском командоконтроллер устанавливается в нулевое положение, затем включаются автоматические выключатели QF1 и QF2 и ЭП подключается к источнику питания. По обмотке ОВ возбуждения начинает протекать ток возбуждения, и, кроме того, срабатывает реле времени КТ1, шунтируя в цепи реле контроля напряжения своим контактом контакт реле КА обрыва цепи обмотки возбуждения. Если при этом реле максимального тока КА1 и КА2 находятся в нормальном (отключенном) положении, то срабатывает реле КV4, подготавливая питание схемы управления через свой замыкающий контакт. Если в процессе работы произойдет недопустимое снижение напряжения питания или тока возбуждения двигателя или ток в якоре превысит допустимый уровень, то произойдет отключение реле КV4, схема управления лишится питания и двигатель будет отключен от сети. Таким образом, реле выполняет роль исполнительного элемента трех защит.
Для пуска двигателя до максимальной частоты вращения рукоятка командоконтроллера SА перемещается в крайнее третье положение. Это приведет к срабатыванию контактора КМ и подключению якоря М двигателя к источнику питания, после чего он начнет свой разбег с полным сопротивлением пускового резистора в цепи якоря. Реле времени КТ1, потеряв питание вследствие размыкания контакта КМ, начнет отсчет выдержки времени работы на первой ступени, а реле времени КТ2 и КТЗ, сработав от падения напряжения на резисторах Rд1 и Rд2, разомкнут свои контакты в цепях контакторов ускорения КМ2 и КМ3. Одновременно с этим включаются «экономический» контактор КМ6 и контактор управления возбуждением КМЗ, в результате чего шунтируется резистор Rв и пуск двигателя происходит при полном магнитном потоке.
Через определенное время замкнется размыкающий контакт КТ1, контактор КМ1 включится, зашунтирует первую ступень пускового резистора Rд1 и одновременно катушку реле времени КТ2. Последнее, отсчитав свою выдержку времени, включит контактор КМ2, который зашунтирует вторую ступень пускового резистора Rд2 и катушку реле КТЗ. Это реле, также отсчитав свою выдержку времени, вызовет срабатывание контактора КМЗ и шунтирование последней ступени пускового резистора, после чего двигатель выходит на свою естественную характеристику.
После шунтирования третьей ступени пускового резистора начинается ослабление магнитного потока, которое подготавливается включением реле КVЗ срабатывания КМЗ. В процессе ослабления тока возбуждения с помощью реле управления КV1 обеспечивается контроль за током якоря. При бросках тока реле КV1 обеспечивает включение или отключение контактора КМЗ, усиливая или ослабляя ток возбуждения, в результате чего ток в якорной цепи не выходит за допустимые пределы. При размыкании контакта КМ5 часть тока возбуждения замыкается через диод VD и разрядный резистор Rр.
Торможение двигателя осуществляется перестановкой рукоятки командоконтроллера SА в нулевое положение. Это приводит к выключению контактора КМ и отключению якоря М от источника питания. Поскольку в процессе пуска двигателя реле динамического торможения КV2 включилось, замыкание размыкающего контакта КМ в цепи контактора торможения КМ4 вызовет его включение. Резистор Rдт окажется подключенным к якорю М двигателя, который перейдет в режим динамического торможения. При малых частотах вращения двигателя, когда его ЭДС станет ниже напряжения отпускания (удержания) реле КV2, оно отключится, выключит контактор КМ4 и процесс торможения закончится. Отметим, что динамическое торможение происходит при полном магнитном потоке.
Для снижения частоты вращения двигателя рукоятка командоконтроллера SА переводится в положения 1 или 2. В положении 1 двигатель работает на искусственной характеристике, соответствующей наличию в цепи якоря резисторов Rд2 + Rд3, а в положении 2 —на характеристике, обусловленной резистором Rд3.
studfiles.net
МИНИСТЕРСТВО ОБРАЗОВАНИЯ УКРАИНЫ
СЕВАСТОПОЛЬСКОЕ ВЫСШЕЕ ПРОФЕССИОНАЛЬНОЕ УЧИЛИЩЕ № 3
ВЫПУСКНАЯ ПИСЬМЕННАЯ
ЭКЗАМЕНАЦИОННАЯ РАБОТА
Тема:
«Монтаж электрической схемы управления электродвигателем»
Учащегося группы 7/8:
Левицкого Павла Владимировича
По профессии:
электромонтажник судовой.
Руководитель:
Е.И.Коршунова
Севастополь.
2006 год.
Содержание
1 Введение. Роль Электротехники в развитии судостроения
2 Основная часть
2.1 Схема управления электродвигателем
2.2 Основные элементы схемы и их назначение.
2.3 Принцип работы электрической схемы вентилятора
2.4 Технология монтажа электрической схемы
3. Материалы, используемые для монтажа схемы
4. Инструменты
5. Техника безопасности
Литература
1. Введение. Роль электротехники в развитии судостроения
Электротехника в судостроении имеет очень большое значение. Эта отрасль науки и техники, связанная с получением, преобразованием и использованием электрической энергии.
В судостроении применяются электрические и магнитные явления. На судах прокладываются многокилометровые артерии электропроводок, монтируются многочисленные электроприводы судовых механизмов, устанавливаются и настраиваются современные автоматические устройства, навигационная и радиотехническая аппаратура.
От надёжности электротехнических устройств зависит надёжность и долговечность спущенного на воду судна.
В 1832 году Фарадей открыл закон электромагнитной индукции и тем самым положил начало электромашиностроению. Годом рождения судового электропривода можно по праву считать 1838 год, когда русский учёный Б.С.Якоби создал первую в мире гребную электрическую установку. Изготовленный им электродвигатель постоянного тока был установлен на небольшом катере и испытан на Неве. Питание двигатель получал от гальванической батареи. Очень слабая энергетическая база в первой половине 19 века тормозила развитие электропривода, и электроэнергия на судах применялась только для освещения.
Первые серьёзные работы по становлению судового электропривода на российских судах были предприняты во второй половине 19 века. Так в 1886 году на крейсерах «Адмирал Нахимов», «Адмирал Корнилов», «Лейтенант Ильин» были использованы электрические вентиляторы, а в 1892 году на броненосном крейсере «Двенадцать апостолов» впервые в мировой практике был установлен электропривод рулевого устройства. Использование электродвигателей для привода грузоподъёмных устройств было начато в 1897 году установкой электрической лебёдки на транспортном судне «Европа». В последующие годы производится электрификация рулевых и якорных устройств на крейсерах «Громобой», «Паллада» и других.
Подлинным переворотом в развитии судовой энергетики явились работы русского изобретателя трёхфазного тока М.О. Доливо-Добровольского. Созданные им синхронные генераторы, трёхфазный трансформатор и асинхронные двигатели преобразили судовую энергетическую установку. С 1908 года на судах стал внедряться переменный ток, что давало большие технические и экономические преимущества. На крейсере «Баян» и минном заградителе «Амур» были установлены водоотливные насосы с приводом от асинхронных двигателей. Построенные по проекту академика А.Н. Крылова линейные корабли типа «Севастополь» имели судовую электростанцию трёхфазного тока. [2]
Россией и Украиной создано огромное количество судов, оснащённых комплексными системами автоматизации с большой степенью электрификации судовых механизмов и систем. Значительно возросла мощность генераторных агрегатов судовых электростанций.
Электротехника очень важна на судах. Для обеспечения нормальных условий работы и обитаемости необходимо электрическое освещение. Нагревательные приборы предназначены для тепловыделения, необходимого для приготовления пищи, повышению температуры окружающего воздуха, жидкости, отдельных элементов, склонных к обмерзанию, а также удовлетворения бытовых нужд пассажиров и экипажа. От многих электроустройств зависит безопасность плавания груза, жизнь людей и сохранность груза, например, рулевое устройство, пожарный и осушительный насосы, радиостанция, навигационные приборы, сеть аварийного освещения и т.д. Электрификация механизмов, обслуживающих якорные, швартовые, грузовые и спасательные устройства позволяет автоматизировать эти трудоёмкие процессы.
2.Основная часть
2.1 Схема управления электродвигателем
Функциональная cхема управления асинхронным двигателем с короткозамкнутым ротором изображена на рисунке 1.

Рис.1.Функциональная схема управления асинхронным двигателем.
Трёхфазный переменный ток подаётся на автоматический выключатель, который применяется для подключения трёхфазного асинхронного двигателя. В автоматическом выключателе помимо системы контактов, имеются комбинированные расцепители (тепловой и электромагнитный), что обеспечивает автоматическое отключение при длительной перегрузке и коротком замыкании. От автоматического выключателя питание подаётся на магнитный пускатель. Магнитный пускатель - аппарат для дистанционного управления двигателем. Он осуществляет пуск, остановку и защиту двигателя от перегрева и сильного снижения напряжения. Основная часть магнитного пускателя - трёхполюсный электромагнитный контактор. От магнитного пускателя управление передаётся трёхфазному асинхронному электродвигателю переменного тока. Асинхронный двигатель отличается простотой конструкции и несложностью обслуживания. Он состоит из двух основных частей - статора – неподвижной части и ротора - вращающейся части. Статор имеет пазы, в которые укладывается трёхфазная статорная обмотка, подключаемая к сети переменного тока. Эта обмотка предназначена для создания вращающего кругового магнитного поля. Вращение кругового магнитного поля обеспечивается сдвигом по фазе друг относительно друга каждой из трёх систем трёхфазного тока на угол, равный 120 градусам.
Обмотки статора для подключения к напряжению сети 220В соединены треугольником (Рис.8). В зависимости от типа обмотки ротора, машины могут быть с фазным и короткозамкнутым ротором. Несмотря на то, что двигатель с фазным ротором обладает лучшими пусковыми и регулировочными свойствами, двигатель с короткозамкнутым ротором проще и надёжнее в эксплуатации, а также дешевле. Я выбрал двигатель с короткозамкнутым ротором, так как в настоящее время большинство изготовляемых промышленностью двигателей являются двигателями с короткозамкнутым ротором. Обмотка ротора выполняется по типу беличьего колеса, в пазы ротора заливают под давлением горячий алюминий. Проводники обмотки ротора соединены, образуя трёхфазную систему. Двигатель приводит в движение вентилятор. Вентиляторы, применяемые на судах, различают в зависимости от создаваемого ими напора. Смонтированный в схеме вентилятор является вентилятором низкого давления. Обычно вентиляторы не регулируются и не реверсируются, поэтому их привод имеет простейшую схему управления, которая сводится к пуску, остановке и защите.[2]
Принципиальная электрическая схема нереверсивного управления трёхфазным асинхронным электродвигателем с короткозамкнутым ротором посредством автоматического выключателя и магнитного пускателя с двухполюсным тепловым реле представлена на рисунке 2.[4]
От силового щита питание подаётся на автоматический выключатель с тепловыми и электромагнитными расцепителями максимального тока. Схема магнитного пускателя составлена с соблюдением рекомендуемых условных графических обозначений элементов схем автоматического управления двигателем. Здесь все элементы одного и того же аппарата обозначены одинаковыми буквами.
Рис.2.Схема управления асинхронным двигателем с короткозамкнутой обмоткой ротора.
Так, главные замыкающие контакты линейного трёхполюсного контактора, находящиеся в силовой цепи, его катушка и вспомогательные замыкающие контакты, находящиеся в цепи управления, обозначены буквами КЛ. Нагревательные элементы теплового реле, включённые в силовую цепь, и остающиеся размыкающие контакты с ручным возвратом этого же реле в исходное положение, которые находятся в цепи управления, обозначены буквами РТ. При включенном трёхполюсном выключателе после нажатия пусковой кнопки КнП включается катушка линейного трёхполюсного контактора КЛ и его главные замыкающие контакты КЛ присоединяют обмотку статора трёхфазного асинхронного двигателя АД к питающей сети в результате чего ротор приходит во вращение. Одновременно замыкаются вспомогательные замыкающие контакты КЛ, шунтирующие пусковую кнопку КнП, что позволяет её отпустить. Нажатие остановочной кнопки КнС отключает цепь питания катушки КЛ, вследствие чего якорь контактора выпадает, главные замыкающие контакты КЛ размыкаются и обмотка статора двигателя отключается от питающей сети.
2.2 Основные элементы схемы и их назначение
mirznanii.com
Для синхронных двигателей всегда применяют асинхронный пуск.
Отсюда, в отношении операций переключения, осуществляемых и цепи статора двигателя, пуск синхронных двигателей аналогичен пуску короткозамкнутых асинхронных двигателей: либо прямой пуск (включением статорной обмотки сразу на полное напряжение сети), либо пуск при пониженном напряжении (через резисторы, реакторы и автотрансформатор) с последующим переключением в функции времени на полное напряжение.
Специфической особенностью пуска синхронного двигателя является управление подачей в его обмотку возбуждения постоянного тока от возбудителя. В качестве последних обычно используют генераторы постоянного тока. Для быстроходных двигателей вал возбудителя непосредственно соединяется с валом двигателя. Для тихоходных двигателей применяют возбудитель с отдельным приводным короткозамкнутым асинхронным двигателем. Разработаны также системы тиристорного возбуждения.
Если позволяют питающая сеть и двигатель, то применяют прямой пуск с наглухо (постоянно) подключенным возбудителем (обычно при статическом моменте Мс на валу двигателя, не превышающем 0,4 Мном) и с принудительным подключением возбудителя при подсинхронной скорости (при (Мс > 0,4 Mном). В случаях, когда сеть и двигатель не допускают прямою пуска и он производится при пониженном напряжении, различают: «легкий» пуск, при котором возбуждение подается до включения обмотки статора на полное напряжение (при небольшом Мс), и «тяжелый» пуск — если подача возбуждения происходит при полном напряжении на обмотке статора (при значительном Мс). Реакторный и автотрансформаторный пуск применяют преимущественно для двигателей высокого напряжения (выше 1000 В). Пуск с резисторами используют только для двигателей низкого напряжения (до 1000 В) мощностью до 400 кВт.
На рис. 2.13 приведены типичные схемы включения обмотки возбуждения синхронного двигателя. Схема на рис. 2.13, а отвечает прямому пуску с наглухо подключенным возбудителем В. Здесь операции управления пуском сводятся только к включению линейного выключателя ВЛ , присоединяющего статорную обмотку двигателя к сети. По мере разгона двигателя напряжение возбудителя увеличивается, соответственно растет и ток возбуждения, который при подсинхронной скорости оказывается достаточным для вхождения двигателя в синхронизм.
Схемы на рис. 2.13, б, в применяют при более тяжелых условиях пуска. Начинается пуск здесь также с включения выключателя ВЛ. Катушка контактора возбуждения КВ при этом обесточена (цепь ее включения на схемах не показана), обмотка возбуждения двигателя LM либо замкнута на разрядное сопротивление Rв I (рис. 2.13, б), либо подключена к возбудителю последовательно с сопротивлением Rв (рис. 2.13, в). Назначение показанных на схемах реле РПВ будет рассмотрено ниже. По достижении двигателем подсинхронной скорости включается контактор KB и присоединяет обмотку LM непосредственно к якорю возбудителя В. Двигатель входит в синхронизм. Поскольку синхронные двигатели работают обычно в длительном режиме, целесообразно применять в качестве контактора KB контактор с механической защелкой, удерживающей его якорь в притянутом положении. Тогда после включения контактора KB можно снять напряжение с его катушки. Тем самым достигается не только устранение лишних потерь энергии в катушке KB, но и сохранение возбуждения двигателя даже при исчезновении напряжения в цепи управления. Подачей возбуждения можно управлять в функции скорости (скольжения) или тока статора двигателя. Первый способ реализуют при помощи электромагнитного реле постоянного тока РПВ, катушка которого включена
через диод Д на часть разрядного сопротивления Rв (рис. 2.13, б). При подключении обмотки статора двигателя к сети в обмотке возбуждения LM наводится переменная, однофазная ЭДС. По катушке реле РПВ начнет протекать выпрямленный диодом Д ток в виде импульсов, амплитуда и частота которых пропорциональны скольжению двигателя s. В самом начале пуска, когда s = 1, импульсы тока достаточно велики и реле РПВ включится. По мере разгона двигателя амплитуда импульсов уменьшается, а интервалы между ними увеличиваются. При подсинхронной скорости эти интервалы станут равными времени отпускания якоря реле, и его контакт замкнется, включая контактор KB однако такой способ управления подачей возбуждения не обеспечивает четкого вхож дения двигателя в синхронизм из-за разброса выдержек времени реле РПВ.
дения двигателя в синхронизм из-за разброса выдержек времени реле РПВ.
В настоящее время применяют, как правило, второй способ управление в функции тока статора двигателя. Токовое реле РПВ получает питание от трансформатора тока TT, включенного в фазу статорной цепи (рис. 2.13, в). Как известно, при асинхронном пуске ток статора резко уменьшается в зоне подсинхронных скоростей. Это обстоятельство и используют для фиксации момента подачи возбуждения.

Рис. 2.14. Узел схемы управления
После нажатия на кнопку КнП и включения контактора ВЛ (рис. 2.14) реле РПВ срабатывает от начального броска пускового тока. Оно открывает свой размыкающий контакт в цепи катушки контактора KB, а замыкающим контактом включает блокировочное реле РБ. Это реле замыкает свои контакты, становится на самопитание и подготавливает к последующему включению цепь катушки контактора КВ. Когда двигатель достигнет подсинхронной скорости, ток статора снизится настолько, что реле РПВ отпустит свой якорь. Это приведет к включению контактора КВ. Его контакты закоротят
соответственно разрядное сопротивление Rв и катушку реле РПВ (рис. 2.13, в), и последнее не сработает от броска тока статора при вхождении двигателя в синхронизм.
electrono.ru










