Дата публикации: 16 июля 2013.
 Рассмотрены вопросы применения микроконтроллеров для управления электроприводом; устройство, принципы действия и системы управления электродвигателей постоянного и переменного тока, набор периферийных устройств. Приведено описание и системы команд микроконтроллеров, используемых для управления электроприводом.
Рассмотрены вопросы применения микроконтроллеров для управления электроприводом; устройство, принципы действия и системы управления электродвигателей постоянного и переменного тока, набор периферийных устройств. Приведено описание и системы команд микроконтроллеров, используемых для управления электроприводом.
Название: Микроконтроллерное управление электроприводомАвторы: Алексеев К.Б., Палагута К.А.Издательство: МГИУГод издания: 2008Страниц: 298ISBN: 978-5-2760-1414-2Формат: DJVUРазмер: 10,4 МбЯзык: русский
Оглавление
Введение
Глава 1. Тенденции развития систем управления электроприводом1.1- Назначение и виды электроприводов1.2. Основные тенденции развития встроенных систем управления двигателем1.3. Типовые структуры перспективных систем управления приводами переменного тока1.4. Преимущества цифровых электроприводов1.5. Требования к микроконтроллеру в зависимости от круга решаемых задач
Глава 2. Система управления электроприводом на базе асинхронного электродвигателя с помощью микроконтроллера2.1. Вращающееся магнитное поле машины переменного тока2.2. Конструкция и принцип действия трехфазных асинхронных машин2.2.1. Конструкция трехфазных асинхронных машин2.2.2. Распределенная обмотка статора трехфазных асинхронных машин2.2.3. Принцип действия трехфазных асинхронных машин2.3. Схема включения, статические характеристики и режимы работы асинхронного двигателя2.3.1. Схема включения асинхронного двигателя2.3.2. Электромеханическая характеристика асинхронного двигателя2.3.3. Механическая характеристика асинхронного двигателя2.4. Асинхронный электропривод с прямым цифровым управлением и развитыми интеллектуальными свойствами2.5. Управление асинхронным электродвигателем переменного тока по принципу постоянства V/f и ШИМ-управления2.5.1. Ключевые особенности AT90PWM32.5.2. Принцип действия
Глава 3. Система управления электроприводом на базе синхронного и вентильного электродвигателей с помощью микроконтроллера3.1. Синхронная машина с электромагнитным возбуждением3.1.1. Конструкция синхронной машины с электромагнитным возбуждением3.1.2. Принцип действия синхронного генератора3.1.3. Принцип действия синхронного двигателя3.1.4. Схема включения, статические характеристики и режимы работы синхронного двигателя3.1.5. Пуск синхронного двигателя3.1.6. Синхронный двигатель как компенсатор реактивной мощности3.1.7. Особенности переходных процессов электропривода с синхронным приводом3.2. Электропривод с вентильным двигателем3.3. Вентильно-индукторный электропривод3.4. Многофункциональный векторный электропривод переменного тока с общим микроконтроллерным ядром
Глава 4. Обзор системы ЭП на базе двигателя постоянного тока4.1. Краткое описание электропривода с двигателем постоянного тока4.1.1. Конструкция коллекторных машин4.1.2. Принцип действия ДПТ4.2. Бесконтактные двигатели постоянного тока4.3. Замкнутые схемы управления электропривода с ДПТ с использованием микроконтроллера 4.4. Управление двухфазным бесколлекторным электродвигателем постоянного тока без датчиков4.4.1. Принцип действия4.4.2. Управление БКЭПТ без датчиков4.5. Методы устранения помех от ходового двигателя и контроллера
Глава 5. Электропривод на основе линейного двигателя5.1. Конструкция и принцип действия линейного двигателя5.2. Электропривод с линейным асинхронным двигателем5.3. Система управления линейным прецизионным электроприводом на базе сигнального процессора5.4. Информационное обеспечение систем управления ЛД
Глава 6. Микроконтроллерные системы управления электроприводами6.1. Микроконтроллеры для встраиваемых систем управления электроприводом. Семейство «Motor Control» фирмы Analog Devices6.1.1. Общая характеристика семейства «Motor Control»6.1.2. Модуль ШИМ-генератора6.1.3. Модуль АЦП6.1.4. Дополнительные периферийные модули6.1.5. Перспективы развития6.2. Микроконтроллеры для встраиваемых систем управления электроприводом. Серии «DashDSP»и «Mixed Signal DSP» фирмы Analog Devices6.2.1. Общая характеристика семейства «DashDSP»6.2.2. Модуль ШИМ-генератора6.2.3. Модуль АЦП6.2.4. Дополнительные периферийные устройства6.2.5. Серия «Mixed Signal DSP»6.2.6. Отличительные особенности DSP-микроконтроллеров фирмы Analog Devices6.3. Применение DSP микроконтроллеровв управлении вентильными двигателямибез датчика положения ротора6.4. Управление 3-фазными бесщеточными электродвигателями при помощи микроконтроллеров семейства ST7MC компании STMicroelectronics
Глава 7. Специализированные микроконтроллеры фирм Atmel и Infineon для управления электроприводами7.1. Семейство 8-разрядных микроконтроллеров AVR7.1.1. Характеристики AVR-микроконтроллеров7.2. Микроконтроллер серии С166 фирмы Infenion AG для управления электроприводами
Глава 8. Использование интегрированных схем программируемой логики для управления шаговым двигателем8.1. Основы устройства и работы шагового двигателя: Принцип действия шагового двигателя8.2. Сведения о двигателях серии ДБМ8.3. Управление двигателем ДБМ8.4. Составление алгоритма работы блока управления8.5. Разработка внутренней структуры цифрового блока управления8.6. Разработка внутренней структуры программно-логической интегральной схемы
Заключение
Список литературы
Скачать с Depositfiles
radioparty.ru
МИКРОКОНТРОЛЛЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ТРЕХФАЗНЫМ ДВИГАТЕЛЕМ
Абрамов Сергей г.Оренбург

В настоящее время практически 60 % всей вырабатываемой электроэнергии потребляется электродвигателями. Поэтому достаточно остро стоит задача экономии электроэнергии и уменьшения стоимости электродвигателей. Трехфазные асинхронные двигатели считаются достаточно универсальными и наиболее дешевыми, но в то же самое время подключать их к однофазной сети и управлять частотой вращения достаточно сложно. Заманчива перспектива, увеличения номинальной частоты вращения двигателя, в двое и более раз или использование малогабаритных двигателей рассчитанных на частоту питающей сети 400-1000 Гц и имеющие меньшую массу и стоимость. В данной радиолюбительской конструкции предпринята попытка решения проблемы. Предлагаемая система управления работает от однофазной сети 220вольт и позволяет плавно менять обороты двигателя и отображать частоту инвертора на двухразрядном цифровом индикаторе. Дискретность изменения частоты инвертора составляет 1 Гц и регулируется в пределах от 1 до 99 Гц. В предлагаемой схеме используется число-импульсный метод управления асинхронным двигателем с частотой модуляции 10 кГц Рис1. позволяющий получать синусоидальный ток на обмотках двигателя. Существует также более перспективный, ШИРОТНО ИМПУЛЬСНЫЙ МЕТОД (ШИМ, PWM – англ.) использующий управление с обратными связями и без них. С частотами модуляции от 3 до 20 кГц и всевозможные методы коммутации, позволяющие увеличить выходное напряжение инвертора на 15-27% по сравнению с питающей сетью т.е. до 354-390 вольт.
 Рис1.
Рис1.
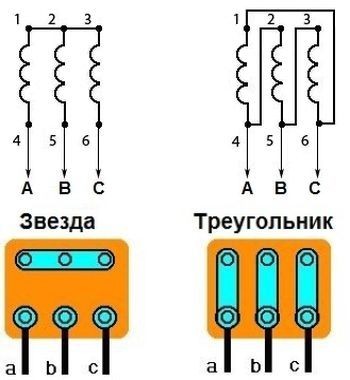
Схема, изображённая на рис2, состоит из управляющего устройства D2, применен микроконтроллер PIC16F628-20/P работающий на частоте 20 мГц, кнопок управления Пуск (SA1), Стоп (SA2), кнопки увеличения и уменьшения частоты соответственно SA3.SA4. Двоично-семисегментного дешифратора D1, светодиодных матриц HG1,HG2. Узла торможения VT9,VT10,K1. В силовой цепи используется трехфазный мостовой драйвер D4 IR2130 фирмы INTERNATIONAL RECTIFIER имеющий три выхода для управления нижними ключами моста и три выхода для ключей с плавающим потенциалом управления. Данная микросхема имеет систему защиты по току которая в случае перегрузки выключает все ключи а также предотвращает одновременное открывание верхних и нижних транзисторов и тем самым предотвращает протекание сквозных токов. Для сброса защиты необходимо установить все единицы на входах HNx, LNx. В качестве силовых ключей применены МОП транзисторы IRF740. Цепь перегрузки состоит из датчика тока R10 делителя напряжения R7-R9 позволяющего точно установить ток срабатывания защиты, и интегрирующей цепочки R6-C3 которая предотвращает ложное срабатывание токовой защиты в моменты коммутаций. Напряжение срабатывания защиты составляет 0,5 вольт по входу ITRP (D4). После срабатывания защиты на выходе FAULT (открытый коллектор) появляется логический ноль, зажигается светодиод HL1, и закрываются все силовые ключи. Для более быстрой разрядки емкостей затворов силовых транзисторов можно установить параллельно резисторам, включенным в цепь затвора, диодов в обратном направлении. Двигатель необходимо включить по схеме звезды. Источник питания состоит из мощных диодов VD11-VD14, токоограничительного резистора R20, фильтрующей емкости C10, емкость C11 предотвращает всплески, которые будут возникать при коммутациях на паразитных индуктивностях схемы. А также маломощного трансформатора T1, стабилизатора напряжения 15 вольт D5 для питания схемы драйвера, и стабилизатора напряжения 5 вольт D3 для питания микроконтроллера и схемы индикации.
 рис2.
рис2.
При использовании более мощного двигателя вместо транзисторов IRF740 можно использовать IGBT транзисторы типа IRGBC20KD2-S, IRGBC30KD2-S при этом диоды VD7-VD10, VD15,VD16 следует выпаять. Конденсатор C11 должен быть типа К78-2 на 600-1000 Вольт. Вместо VD1-VD6 желательно применить сверх быстрые диоды типа 10DF6, а емкости С15-С17 уменьшить до 2,2-4,7 микрофарад, которые должны быть рассчитаны на напряжение 50 вольт. Трансформатор T1 мощностью 0,5-2 Вт от калькулятора с перемотанной вторичной обмоткой. Обмотка намотана проводом диаметром 0,2 и должна выдавать 19-20 вольт. Печатная плата Рис3. выполнена на одностороннем стеклотекстолите, для того чтобы можно было воспользоваться утюго-лазерной технологией изготовления. Светодиод HL1, матрицы HG1,HG2, кнопки SA1-SA4 установлены со стороны дорожек. По вашим просьбам печатная плата в формате PCAD2000 -здесь
 Рис3.
Рис3.
HEX формат программы находится в таблице 1. В момент записи в нулевую ячейку ОЗУ необходимо поместить шестнадцатеричное число от 1 до 63, начальная частота инвертора. Программа выполнена таким образом что двигатель стартует с плавным набором скорости от 0 до установленной частоты примерно за 2 секунды, эта константа находится в ячейках 0207 и 0158 таблицы. Если необходимо увеличить скорость нарастания в два раза то вместо кодов 3005 необходимо записать 300A.
Табл1. :020000040000FA :02000000EA29EB :08000800C200030EC3000B1936 :100010000E28430E8300C20E420E09000B308100F1 :100020000B116400230800258A01A1002308002683 :100030008A01A200331842282108A607031C37288A :100040000630A607A70A2708FA3C03193228220817 :10005000A707031832282708FA3C031C3228031983 :1000600032287228FA30A700A60133147228260815 :10007000FA3C031C3F28031D2728A6012228FA303A :10008000A6022228A708031960282108A60203183F :100090004F280630A602A703A708031955282208EF :1000A000A70203185928A7016428A6080319652880 :1000B0004F28A708031D7228A6080319652872286F :1000C0002108A60203184F28A60133100030A8000B :1000D000AA00A730A900AB00AF01B21A7128B2166E :1000E0007228B212B3189A282108A807031C8F2877 :1000F0000630A807A90A2908FA3C03198A28220809 :10010000A90703188A282908FA3C031C8A2803191E :100110008A28CA28FA30A900A801B314CA282808D6 :10012000FA3C031C9728031D7F28A8017A28FA307F :10013000A8027A28A9080319B8282108A8020318D8 :10014000A7280630A802A903A9080319AD28220888 :10015000A9020318B128A901BC28A8080319BD28C1 :10016000A728A908031DCA28A8080319BD28CA285A :100170002108A8020318A728A801B3100030A60080 :10018000AA00A730A700AB00B001321BC928321764 :10019000CA2832133319F2282108AA07031CE728BA :1001A0000630AA07AB0A2B08FA3C0319E2282208FA :1001B000AB070318E2282B08FA3C031CE2280319BA :1001C000E2282229FA30AB00AA01331522292A0895 :1001D000FA3C031CEF28031DD728AA01D228FA30C5 :1001E000AA02D228AB08031910292108AA02031871 :1001F000FF280630AA02AB03AB0803190529220821 :10020000AB0203180929AB011429AA0803191529FF :10021000FF28AB08031D2229AA0803191529222942 :100220002108AA020318FF28AA0133110030A600F2 :10023000A800A730A700A900B101B21B2129B2175D :100240002229B213B21C3529851E922906083F388F :100250008600B21A9621B21EA421321BB221321F8F :10026000C021B21BCE21B21FDC21B70B7A2964302A :10027000B700321A75290613850105140000000025 :1002800000000000051AB21485018514000000006A :1002900000000000051A7B29B908031D5B2923080B :1002A000200203195C29031C5729A30A5829A30318 :1002B0000530B9005C29B903B80B70293230B80099 :1002C000850105150000000000000000051A321528 :1002D000850185150000000000000000051AB21518 :1002E00034088500861732167A298613350885006A :1002F0000617321209283F308604B2100130A300DD :1003000006178617FF30BB00FF30BA003C30BC0038 :100310006400BB0B8C29BA0B8829BC0B88290613F7 :1003200086134C29B2103F30860435292708F03C4B :10033000031CA029270800248A01AF07031CA22957 :1003400006100800061408002708F03C031CAE291C :10035000270800248A01AF07031CB0298611080072 :10036000861508002908F03C031CBC292908002434 :100370008A01B007031CBE298610080086140800F5 :100380002908F03C031CCA29290800248A01B00767 :10039000031CCC2906120800061608002B08F03CA6 :1003A000031CD8292B0800248A01B107031CDA2971 :1003B00006110800061508002B08F03C031CE6296E :1003C0002B0800248A01B107031CE82986120800C3 :1003D0008616080083120313850107309F003F3003 :1003E00086000B308100831603139F138030810039 :1003F0003030850000308600A0308B00831203135C :10040000A0144F30840080018403A018032A053013 :10041000B9000130A3002030B2000230B300003038 :10042000A600A800A730A700A9006430B7003230AA :10043000B80000305622A000362264003219232270 :10044000B2192A221D2A63302002031DA00A362277 :100450003211302A01302002031DA0033622B211CE :100460002008C100003042226400080020088B13DD :1004700000238A018B17B6000F39B400360E0F39EE :10048000B50008008B13831603139B00831203131C :100490004108831603139A001C1555309D00AA309D :1004A0009D009C14831203138B1708008B13831673 :1004B00003139B001C141A08831203138B170800E4 :100600000A148A1482070034013402340334043497 :1006100005340634073408340934103411341234E4 :100620001334143415341634173418341934203470 :1006300021342234233424342534263427342834F6 :10064000293430343134323433343434353436347C :100650003734383439344034413442344334443408 :100660004534463447344834493450345134523494 :100670005334543455345634573458345934603420 :1006800061346234633464346534663467346834A6 :10069000693470347134723473347434753476342C :1006A00077347834793480348134823483348434B8 :1006B0008534863487348834893490349134923444 :0E06C0009334943495349634973498349934A6 :100800000A158207003402340334053406340834F0 :100810000A340B340D340E341034123413341534BE :10082000163418341A341B341D341E342034223448 :1008300023342534263428342A342B342D342E34D2 :1008400030343234333435343634383439343B345C :100850003D343E34403441344334443446344734E8 :1008600049344B344C344E344F3451345234543474 :100870005534573458345A345B345D345E34603404 :100880006134633464346634673469346A346C3494 :100890006D346E3470347134733474347634773428 :1008A00079347A347B347D347E34803481348234BC :1008B000843485348634883489348B348C348D3454 :1008C0008F349034913493349434953496349834EE :1008D00099349A349C349D349E349F34A134A2348C :1008E000A334A434A634A734A834A934AA34AC342D :1008F000AD34AE34AF34B034B234B334B434B534D0 :10090000B634B734B834BA34BB34BC34BD34BE3476 :10091000BF34C034C134C234C334C434C534C63423 :10092000C734C834C934CA34CB34CC34CD34CE34D3 :10093000CF34D034D134D234D334D434D534D63483 :10094000D634D734D834D934DA34DB34DC34DC343C :10095000DD34DE34DF34E034E034E134E234E334F7 :10096000E334E434E534E634E634E734E834E834B8 :10097000E934EA34EA34EB34EC34EC34ED34ED347D :10098000EE34EF34EF34F034F034F134F134F23447 :10099000F234F334F334F434F434F534F534F63417 :1009A000F634F734F734F834F834F834F934F934E9 :1009B000F934FA34FA34FB34FB34FB34FB34FC34C2 :1009C000FC34FC34FD34FD34FD34FD34FE34FE349F :1009D000FE34FE34FE34FF34FF34FF34FF34FF3482 :0609E000FF34FF34FF3478 :100A00000A140A1582070034193432344B34643422 :100A10007D349634AF34C834E13400341934323480 :100A20004B3464347D349634AF34C834E13400340C :100A3000193432344B3464347D349634AF34C83492 :100A4000E1340034193432344B3464347D34963418 :100A5000AF34C834E1340034193432344B346434A4 :100A60007D349634AF34C834E13400341934323430 :100A70004B3464347D349634AF34C834E1340034BC :100A8000193432344B3464347D349634AF34C83442 :100A9000E1340034193432344B3464347D349634C8 :100AA000AF34C834E1340034193432344B34643454 :100AB0007D349634AF34C834E134003419343234E0 :0E0AC0004B3464347D349634AF34C834E134A2 :100C00008A140A158207003400340034003400349A :100C10000034003400340034003401340134013431 :100C2000013401340134013401340134013402341B :100C30000234023402340234023402340234023404 :100C400002340334033403340334033403340334ED :100C500003340334033404340434043404340434D7 :100C600004340434043404340434053405340534C1 :100C700005340534053405340534053405340634AB :100C80000634063406340634063406340634063494 :100C9000063407340734073407340734073407347D :100CA0000734073407340834083408340834083467 :100CB0000834083408340834083409340934093451 :0E0CC00009340934093409340934093409347B :02400E00463F2B :00000001FF
Если Вы решили повторить конструкцию, то повторяю для устойчивой работы двигателя настоятельно рекомендую переписать программу. С прошивкой которая приведена в статье двигатель крутиться будет но мощность на валу будет маленькая. (Посмотреть демонстрационный ролик-1,9мв) Необходимо написать новую программу не с число-импульсной, а с ШИМ-модуляцией. И для этого желательно использовать более мощный процессор с 6-ШИМ модулями, что нибудь из разряда PIC18Fxxxx и хорошо подумать над программой.
Наверное все же придется выложить исходник на сайт так как слишком много просьб поступило. Хотя я писал что как рабочая эта программа не подойдет, ее надо переделывать. Эта работа достаточно сложная и так просто ее не сделать, необходимо учитывать массу факторов, ну например в зависимости от нагрузки на валу в процессе вращения менять ширину импульсов, то есть необходим достаточно мощный процессор, или сразу делать двухпроцессорную систему один обсчитывает второй управляет. Мою схему можно без проблем использовать в управлении 3х фазным двигателем который может работать от прямоугольных импульсов. Текс программы на ассемблере для MPLAB
ЛИТЕРАТУРА: В. Козаченко, Основные тенденции развития встроенных систем управления двигателями и требования к микроконтроллерам, CipNews №1-99г. Д. Обухов, С. Стенин, Д. Струнин, А. Фрадкин, Модуль управления электроприводом на микроконтроллере PIC16C62 и драйвере IR2131 , CipNews №6-99г.
Скачать файлы
radio-konst.narod.ru
Согласно последним данным статистики примерно 70% всей выработанной электроэнергии в мире потребляет электропривод. И с каждым годом этот процент растет.
При правильно подобранном способе управления электродвигателем возможно получение максимального КПД, максимального крутящего момента на валу электромашины, и при этом повысится общая производительность механизма. Эффективно работающие электродвигатели потребляют минимум электроэнергии и обеспечивают максимальную экономичность.
Для электродвигателей, работающих от преобразователя частоты ПЧ, эффективность во многом будет зависеть от выбранного способа управления электрической машиной. Только поняв достоинства каждого способа, инженеры и проектировщики систем электроприводов смогут получить максимальную производительность от каждого способа управления.Содержание:
Многие люди, работающие в сфере автоматизации, но не сталкивающиеся вплотную с процессами разработки и внедрения систем электроприводов полагают, что управление электродвигателем состоит из последовательности команд, вводимых с помощью интерфейса от пульта управления или ПК. Да, с точки зрения общей иерархии управления автоматизированной системой это правильно, однако есть еще способы управления самим электродвигателем. Именно эти способы и будут оказывать максимальное влияние на производительность всей системы.
Для асинхронных электродвигателей, подключенных к преобразователю частоты, существует четыре основных способа управления:
Все четыре метода используют широтно-импульсную модуляцию ШИМ, которая изменяет ширину фиксированного сигнала путем изменения длительности импульсов для создания аналогового сигнала.
Широтно-импульсная модуляция применяется к преобразователю частоты путем использования фиксированного напряжения шины постоянного тока. Транзисторы с изолированным затвором (IGBT) путем быстрого открытия и закрытия (правильней сказать коммутации) генерируют выходные импульсы. Варьируя ширину этих импульсов на выходе получают «синусоиду» нужной частоты. Даже если форма выходного напряжения транзисторов импульсная, то ток все равно получается в виде синусоиды, так как электродвигатель имеет индуктивность, которая влияет на форму тока. Все методы управления основываются на ШИМ модуляции. Разница между методами управления заключается лишь в методе вычисления подаваемого напряжения на электродвигатель.

В данном случае несущая частота (показана красным) представляет собой максимальную частоту коммутации транзисторов. Несущая частота для инверторов, как правило, лежит в пределах 2 кГц – 15 кГц. Опорная частота (показана синим) представляет собой сигнал задания выходной частоты. Для инверторов применимых в обычных системах электроприводов, как правило, лежит в пределах 0 Гц – 60 Гц. При накладывании сигналов двух частот друг на друга, будет выдаваться сигнал открывания транзистора (обозначен черным цветом), который подводит силовое напряжение к электродвигателю.
Управление вольт-на-герц, наиболее часто называемое как U/F, пожалуй, самый простой способ регулирования. Он часто используется в несложных системах электропривода из-за своей простоты и минимального количества необходимых для работы параметров. Такой способ управления не требует обязательной установки энкодера и обязательных настроек для частотно-регулируемого электропривода (но рекомендовано). Это приводит к меньшим затратам на вспомогательное оборудование (датчики, провода обратных связей, реле и так далее). Управление U/F довольно часто применяют в высокочастотном оборудовании, например, его часто используют в станках с ЧПУ для привода вращения шпинделя.

Модель с постоянным моментом вращения имеет постоянный вращающий момент во всем диапазоне скоростей при одинаковом соотношении U/F. Модель с переменным соотношением вращающего момента имеет более низкое напряжение питания на низких скоростях. Это необходимо для предотвращения насыщения электрической машины.
U/F — это единственный способ регулирования скорости асинхронного электродвигателя, который позволяет регулирование нескольких электроприводов от одного преобразователя частоты. Соответственно все машины запускаются и останавливаются одновременно и работают с одной частотой.
Но данный способ управления имеет несколько ограничений. Например, при использовании способа регулирования U/F без энкодера нет абсолютно никакой уверенности, что вал асинхронной машины вращается. Кроме того, пусковой момент электрической машины при частоте 3 Гц ограничивается 150%. Да, ограниченного крутящего момента более чем достаточно для применения в большинстве существующего оборудования. Например, практически все вентиляторы и насосы используют способ регулирования U/F.
Данный метод относительно прост из-за его более «свободной» спецификации. Регулирование скорости, как правило, лежит в диапазоне 2% — 3% максимальной выходной частоты. Отклик по скорости рассчитывается на частоту свыше 3 Гц. Скорость реагирования частотного преобразователя определяется быстротой его реакции на изменение опорной частоты. Чем выше скорость реагирования – тем быстрее будет реакция электропривода на изменение задания скорости.
Диапазон регулирования скорости при использовании способа U/F составляет 1:40. Умножив это соотношение на максимальную рабочую частоту электропривода, получим значение минимальной частоты, на которой сможет работать электрическая машина. Например, если максимальное значение частоты 60 Гц, а диапазон составляет 1:40, то минимальное значение частоты составит 1,5 Гц.
Паттерн U/F определяет соотношение частоты и напряжения в процессе работы частотно-регулируемого электропривода. Согласно ему, кривая задания скорости вращения (частота электродвигателя) будет определять помимо значения частоты еще и значения напряжения, подводимого к клеммам электрической машины.
Операторы и технические специалисты могут выбрать необходимый шаблон регулирования U/F одним параметром в современном частотном преобразователе. Предустановленные шаблоны уже оптимизированы под конкретные применения. Также существуют возможности создания своих шаблонов, которые будут оптимизироваться под конкретную систему частотно-регулируемого электропривода или электродвигателя.
Такие устройства как вентиляторы или насосы имеют момент нагрузки, который зависит от скорости их вращения. Переменный крутящий момент (рисунок выше) шаблона U/F предотвращает ошибки регулирования и повышает эффективность. Эта модель регулирования уменьшает токи намагничивания на низких частотах за счет снижения напряжения на электрической машине.
Механизмы с постоянным крутящим моментом, такие как конвейеры, экструдеры и другое оборудование используют способ регулирования с постоянным моментом. При постоянной нагрузке необходим полный ток намагничивания на всех скоростях. Соответственно характеристика имеет прямой наклон во всем диапазоне скоростей.

Если необходимо повысить точность регулирования скорости вращения в систему управления добавляют энкодер. Введение обратной связи по скорости с помощью энкодера позволяет повысить точность регулирования до 0,03%. Выходное напряжение по-прежнему будет определятся заданным шаблоном U/F.
Данный способ управления не получил широкого применения, так как представляемые им преимущества по сравнению со стандартными функциями U/F минимальны. Пусковой момент, скорость отклика и диапазон регулирования скорости – все идентично со стандартным U/F. Кроме того, при повышении рабочих частот могут возникнуть проблемы с работой энкодера, так как он имеет ограниченное количество оборотов.
Векторное управление (ВУ) без обратной связи используется для более широкого и динамичного регулирования скорости электрической машины. При пуске от преобразователя частоты электродвигатели могут развивать пусковой момент в 200% от номинального при частоте всего 0,3 Гц. Это значительно расширяет перечень механизмов, где может быть применен асинхронный электропривод с векторным управлением. Этот метод также позволяет управлять моментом машины во всех четырех квадрантах.

Ограничение вращающего момента осуществляется двигателем. Это необходимо для предотвращения повреждения оборудования, машин или продукции. Значение моментов разбивают на четыре различных квадранта, в зависимости направления вращения электрической машины (вперед или назад) и в зависимости от того, реализует ли электродвигатель режим рекуперативного торможения. Ограничения могут устанавливаться для каждого квадранта отдельно или же пользователь может задать общий вращающий момент в преобразователе частоты.
Двигательный режим асинхронной машины будет при условии, что магнитное поле ротора отстает от магнитного поля статора. Если магнитное поле ротора начнет опережать магнитное поле статора, то тогда машина войдет в режим рекуперативного торможения с отдачей энергии, проще говоря – асинхронный двигатель перейдет в генераторный режим.
Например, машина по закупорке бутылок может использовать ограничение момента в квадранте 1 (направление вперед с положительным моментом) для предотвращения чрезмерного затягивания крышки бутылки. Механизм производит движение вперед и использует положительный момент для того, чтобы закрутить крышку бутылки. А вот устройство, такое как лифт, с противовесом тяжелее, чем пустая кабина, будет использовать квадрант 2 (обратное вращение и положительный момент). Если кабина подымается на верхний этаж, то крутящий момент будет противоположен скорости. Это необходимо для ограничения скорости подъема и недопущения свободного падения противовеса, так как он тяжелее, чем кабина.
Обратная связь по току в данных преобразователях частоты ПЧ позволяет устанавливать ограничения по моменту и току электродвигателя, поскольку при увеличении тока растет и момент. Выходное напряжение ПЧ может изменятся в сторону увеличения, если механизм требует приложения большего крутящего момента, или уменьшатся, если достигнуто его предельно допустимое значение. Это делает принцип векторного управления асинхронной машиной более гибким и динамичным по сравнению с принципом U/F.
Также частотные преобразователи с векторным управлением и разомкнутым контуром имеют более быстрый отклик по скорости – 10 Гц, что делает возможным его применение в механизмах с ударными нагрузками. Например, в дробилках горной породы нагрузка постоянно меняется и зависит от объема и габаритов обрабатываемой породы.
В отличии от шаблона управления U/F векторное управление использует векторный алгоритм, для определения максимально эффективного напряжения работы электродвигателя.

Векторное управления ВУ решает данную задачу благодаря наличию обратной связи по току двигателя. Как правило, обратная связь по току формируется внутренними трансформаторами тока самого преобразователя частоты ПЧ. Благодаря полученному значению тока преобразователь частоты проводит вычисления вращающего момента и потока электрической машины. Базовый вектор тока двигателя математически расщепляется на вектор тока намагничивания (Id) и крутящего момента (Iq).
Используя данные и параметры электрической машины ПЧ вычисляет векторы тока намагничивания (Id) и крутящего момента (Iq). Для достижения максимальной производительности, преобразователь частоты должен держать Id и Iq разведенными на угол 900. Это существенно, так как sin 900 = 1, а значение 1 представляет собой максимальное значение крутящего момента.

В целом векторное управление асинхронным электродвигателем осуществляет более жесткий контроль. Регулирование скорости составляет примерно ±0,2% от максимальной частоты, а диапазон регулирования достигает 1:200, что позволяет сохранять вращающий момент при работе на низких скоростях.
Векторное управление с обратной связью использует тот же алгоритм управления, что и ВУ без обратной связи. Основное различие заключается в наличии энкодера, что дает возможность частотно-регулируемому электроприводу развивать 200% пусковой момент при скорости 0 об/мин. Этот пункт просто необходим для создания начального момента при трогании с места лифтов, кранов и других подъемных машин, чтоб не допустить просадки груза.
Наличие датчика обратной связи по скорости позволяет увеличить время отклика системы более 50 Гц, а также расширить диапазон регулирования скорости до 1:1500. Также наличие обратной связи позволяет управлять не скоростью электрической машиной, а моментом. В некоторых механизмах именно значение момента имеет большую важность. Например, мотальная машина, механизмы закупорки и другие. В таких устройствах необходимо регулировать момент машины.

elenergi.ru
Дата публикации: 16 июля 2013.
Рассмотрены вопросы применения микроконтроллеров для управления электроприводом; устройство, принципы действия и системы управления электродвигателей постоянного и переменного тока, набор периферийных устройств. Приведено описание и системы команд микроконтроллеров, используемых для управления электроприводом.
Название: Микроконтроллерное управление электроприводомАвторы: Алексеев К.Б., Палагута К.А.Издательство: МГИУГод издания: 2008Страниц: 298ISBN: 978-5-2760-1414-2Формат: DJVUРазмер: 10,4 МбЯзык: русский
Оглавление
Введение
Глава 1. Тенденции развития систем управления электроприводом1.1- Назначение и виды электроприводов1.2. Основные тенденции развития встроенных систем управления двигателем1.3. Типовые структуры перспективных систем управления приводами переменного тока1.4. Преимущества цифровых электроприводов1.5. Требования к микроконтроллеру в зависимости от круга решаемых задач
Глава 2. Система управления электроприводом на базе асинхронного электродвигателя с помощью микроконтроллера2.1. Вращающееся магнитное поле машины переменного тока2.2. Конструкция и принцип действия трехфазных асинхронных машин2.2.1. Конструкция трехфазных асинхронных машин2.2.2. Распределенная обмотка статора трехфазных асинхронных машин2.2.3. Принцип действия трехфазных асинхронных машин2.3. Схема включения, статические характеристики и режимы работы асинхронного двигателя2.3.1. Схема включения асинхронного двигателя2.3.2. Электромеханическая характеристика асинхронного двигателя2.3.3. Механическая характеристика асинхронного двигателя2.4. Асинхронный электропривод с прямым цифровым управлением и развитыми интеллектуальными свойствами2.5. Управление асинхронным электродвигателем переменного тока по принципу постоянства V/f и ШИМ-управления2.5.1. Ключевые особенности AT90PWM32.5.2. Принцип действия
Глава 3. Система управления электроприводом на базе синхронного и вентильного электродвигателей с помощью микроконтроллера3.1. Синхронная машина с электромагнитным возбуждением3.1.1. Конструкция синхронной машины с электромагнитным возбуждением3.1.2. Принцип действия синхронного генератора3.1.3. Принцип действия синхронного двигателя3.1.4. Схема включения, статические характеристики и режимы работы синхронного двигателя3.1.5. Пуск синхронного двигателя3.1.6. Синхронный двигатель как компенсатор реактивной мощности3.1.7. Особенности переходных процессов электропривода с синхронным приводом3.2. Электропривод с вентильным двигателем3.3. Вентильно-индукторный электропривод3.4. Многофункциональный векторный электропривод переменного тока с общим микроконтроллерным ядром
Глава 4. Обзор системы ЭП на базе двигателя постоянного тока4.1. Краткое описание электропривода с двигателем постоянного тока4.1.1. Конструкция коллекторных машин4.1.2. Принцип действия ДПТ4.2. Бесконтактные двигатели постоянного тока4.3. Замкнутые схемы управления электропривода с ДПТ с использованием микроконтроллера 4.4. Управление двухфазным бесколлекторным электродвигателем постоянного тока без датчиков4.4.1. Принцип действия4.4.2. Управление БКЭПТ без датчиков4.5. Методы устранения помех от ходового двигателя и контроллера
Глава 5. Электропривод на основе линейного двигателя5.1. Конструкция и принцип действия линейного двигателя5.2. Электропривод с линейным асинхронным двигателем5.3. Система управления линейным прецизионным электроприводом на базе сигнального процессора5.4. Информационное обеспечение систем управления ЛД
Глава 6. Микроконтроллерные системы управления электроприводами6.1. Микроконтроллеры для встраиваемых систем управления электроприводом. Семейство «Motor Control» фирмы Analog Devices6.1.1. Общая характеристика семейства «Motor Control»6.1.2. Модуль ШИМ-генератора6.1.3. Модуль АЦП6.1.4. Дополнительные периферийные модули6.1.5. Перспективы развития6.2. Микроконтроллеры для встраиваемых систем управления электроприводом. Серии «DashDSP»и «Mixed Signal DSP» фирмы Analog Devices6.2.1. Общая характеристика семейства «DashDSP»6.2.2. Модуль ШИМ-генератора6.2.3. Модуль АЦП6.2.4. Дополнительные периферийные устройства6.2.5. Серия «Mixed Signal DSP»6.2.6. Отличительные особенности DSP-микроконтроллеров фирмы Analog Devices6.3. Применение DSP микроконтроллеровв управлении вентильными двигателямибез датчика положения ротора6.4. Управление 3-фазными бесщеточными электродвигателями при помощи микроконтроллеров семейства ST7MC компании STMicroelectronics
Глава 7. Специализированные микроконтроллеры фирм Atmel и Infineon для управления электроприводами7.1. Семейство 8-разрядных микроконтроллеров AVR7.1.1. Характеристики AVR-микроконтроллеров7.2. Микроконтроллер серии С166 фирмы Infenion AG для управления электроприводами
Глава 8. Использование интегрированных схем программируемой логики для управления шаговым двигателем8.1. Основы устройства и работы шагового двигателя: Принцип действия шагового двигателя8.2. Сведения о двигателях серии ДБМ8.3. Управление двигателем ДБМ8.4. Составление алгоритма работы блока управления8.5. Разработка внутренней структуры цифрового блока управления8.6. Разработка внутренней структуры программно-логической интегральной схемы
Заключение
Список литературы
Скачать с Depositfiles
radioparty.ru
Дата публикации: 16 июля 2013.
Рассмотрены вопросы применения микроконтроллеров для управления электроприводом; устройство, принципы действия и системы управления электродвигателей постоянного и переменного тока, набор периферийных устройств. Приведено описание и системы команд микроконтроллеров, используемых для управления электроприводом.
Название: Микроконтроллерное управление электроприводомАвторы: Алексеев К.Б., Палагута К.А.Издательство: МГИУГод издания: 2008Страниц: 298ISBN: 978-5-2760-1414-2Формат: DJVUРазмер: 10,4 МбЯзык: русский
Оглавление
Введение
Глава 1. Тенденции развития систем управления электроприводом1.1- Назначение и виды электроприводов1.2. Основные тенденции развития встроенных систем управления двигателем1.3. Типовые структуры перспективных систем управления приводами переменного тока1.4. Преимущества цифровых электроприводов1.5. Требования к микроконтроллеру в зависимости от круга решаемых задач
Глава 2. Система управления электроприводом на базе асинхронного электродвигателя с помощью микроконтроллера2.1. Вращающееся магнитное поле машины переменного тока2.2. Конструкция и принцип действия трехфазных асинхронных машин2.2.1. Конструкция трехфазных асинхронных машин2.2.2. Распределенная обмотка статора трехфазных асинхронных машин2.2.3. Принцип действия трехфазных асинхронных машин2.3. Схема включения, статические характеристики и режимы работы асинхронного двигателя2.3.1. Схема включения асинхронного двигателя2.3.2. Электромеханическая характеристика асинхронного двигателя2.3.3. Механическая характеристика асинхронного двигателя2.4. Асинхронный электропривод с прямым цифровым управлением и развитыми интеллектуальными свойствами2.5. Управление асинхронным электродвигателем переменного тока по принципу постоянства V/f и ШИМ-управления2.5.1. Ключевые особенности AT90PWM32.5.2. Принцип действия
Глава 3. Система управления электроприводом на базе синхронного и вентильного электродвигателей с помощью микроконтроллера3.1. Синхронная машина с электромагнитным возбуждением3.1.1. Конструкция синхронной машины с электромагнитным возбуждением3.1.2. Принцип действия синхронного генератора3.1.3. Принцип действия синхронного двигателя3.1.4. Схема включения, статические характеристики и режимы работы синхронного двигателя3.1.5. Пуск синхронного двигателя3.1.6. Синхронный двигатель как компенсатор реактивной мощности3.1.7. Особенности переходных процессов электропривода с синхронным приводом3.2. Электропривод с вентильным двигателем3.3. Вентильно-индукторный электропривод3.4. Многофункциональный векторный электропривод переменного тока с общим микроконтроллерным ядром
Глава 4. Обзор системы ЭП на базе двигателя постоянного тока4.1. Краткое описание электропривода с двигателем постоянного тока4.1.1. Конструкция коллекторных машин4.1.2. Принцип действия ДПТ4.2. Бесконтактные двигатели постоянного тока4.3. Замкнутые схемы управления электропривода с ДПТ с использованием микроконтроллера 4.4. Управление двухфазным бесколлекторным электродвигателем постоянного тока без датчиков4.4.1. Принцип действия4.4.2. Управление БКЭПТ без датчиков4.5. Методы устранения помех от ходового двигателя и контроллера
Глава 5. Электропривод на основе линейного двигателя5.1. Конструкция и принцип действия линейного двигателя5.2. Электропривод с линейным асинхронным двигателем5.3. Система управления линейным прецизионным электроприводом на базе сигнального процессора5.4. Информационное обеспечение систем управления ЛД
Глава 6. Микроконтроллерные системы управления электроприводами6.1. Микроконтроллеры для встраиваемых систем управления электроприводом. Семейство «Motor Control» фирмы Analog Devices6.1.1. Общая характеристика семейства «Motor Control»6.1.2. Модуль ШИМ-генератора6.1.3. Модуль АЦП6.1.4. Дополнительные периферийные модули6.1.5. Перспективы развития6.2. Микроконтроллеры для встраиваемых систем управления электроприводом. Серии «DashDSP»и «Mixed Signal DSP» фирмы Analog Devices6.2.1. Общая характеристика семейства «DashDSP»6.2.2. Модуль ШИМ-генератора6.2.3. Модуль АЦП6.2.4. Дополнительные периферийные устройства6.2.5. Серия «Mixed Signal DSP»6.2.6. Отличительные особенности DSP-микроконтроллеров фирмы Analog Devices6.3. Применение DSP микроконтроллеровв управлении вентильными двигателямибез датчика положения ротора6.4. Управление 3-фазными бесщеточными электродвигателями при помощи микроконтроллеров семейства ST7MC компании STMicroelectronics
Глава 7. Специализированные микроконтроллеры фирм Atmel и Infineon для управления электроприводами7.1. Семейство 8-разрядных микроконтроллеров AVR7.1.1. Характеристики AVR-микроконтроллеров7.2. Микроконтроллер серии С166 фирмы Infenion AG для управления электроприводами
Глава 8. Использование интегрированных схем программируемой логики для управления шаговым двигателем8.1. Основы устройства и работы шагового двигателя: Принцип действия шагового двигателя8.2. Сведения о двигателях серии ДБМ8.3. Управление двигателем ДБМ8.4. Составление алгоритма работы блока управления8.5. Разработка внутренней структуры цифрового блока управления8.6. Разработка внутренней структуры программно-логической интегральной схемы
Заключение
Список литературы
Скачать с Depositfiles
radioparty.ru
Дата публикации: 16 июля 2013.
Рассмотрены вопросы применения микроконтроллеров для управления электроприводом; устройство, принципы действия и системы управления электродвигателей постоянного и переменного тока, набор периферийных устройств. Приведено описание и системы команд микроконтроллеров, используемых для управления электроприводом.
Название: Микроконтроллерное управление электроприводомАвторы: Алексеев К.Б., Палагута К.А.Издательство: МГИУГод издания: 2008Страниц: 298ISBN: 978-5-2760-1414-2Формат: DJVUРазмер: 10,4 МбЯзык: русский
Оглавление
Введение
Глава 1. Тенденции развития систем управления электроприводом1.1- Назначение и виды электроприводов1.2. Основные тенденции развития встроенных систем управления двигателем1.3. Типовые структуры перспективных систем управления приводами переменного тока1.4. Преимущества цифровых электроприводов1.5. Требования к микроконтроллеру в зависимости от круга решаемых задач
Глава 2. Система управления электроприводом на базе асинхронного электродвигателя с помощью микроконтроллера2.1. Вращающееся магнитное поле машины переменного тока2.2. Конструкция и принцип действия трехфазных асинхронных машин2.2.1. Конструкция трехфазных асинхронных машин2.2.2. Распределенная обмотка статора трехфазных асинхронных машин2.2.3. Принцип действия трехфазных асинхронных машин2.3. Схема включения, статические характеристики и режимы работы асинхронного двигателя2.3.1. Схема включения асинхронного двигателя2.3.2. Электромеханическая характеристика асинхронного двигателя2.3.3. Механическая характеристика асинхронного двигателя2.4. Асинхронный электропривод с прямым цифровым управлением и развитыми интеллектуальными свойствами2.5. Управление асинхронным электродвигателем переменного тока по принципу постоянства V/f и ШИМ-управления2.5.1. Ключевые особенности AT90PWM32.5.2. Принцип действия
Глава 3. Система управления электроприводом на базе синхронного и вентильного электродвигателей с помощью микроконтроллера3.1. Синхронная машина с электромагнитным возбуждением3.1.1. Конструкция синхронной машины с электромагнитным возбуждением3.1.2. Принцип действия синхронного генератора3.1.3. Принцип действия синхронного двигателя3.1.4. Схема включения, статические характеристики и режимы работы синхронного двигателя3.1.5. Пуск синхронного двигателя3.1.6. Синхронный двигатель как компенсатор реактивной мощности3.1.7. Особенности переходных процессов электропривода с синхронным приводом3.2. Электропривод с вентильным двигателем3.3. Вентильно-индукторный электропривод3.4. Многофункциональный векторный электропривод переменного тока с общим микроконтроллерным ядром
Глава 4. Обзор системы ЭП на базе двигателя постоянного тока4.1. Краткое описание электропривода с двигателем постоянного тока4.1.1. Конструкция коллекторных машин4.1.2. Принцип действия ДПТ4.2. Бесконтактные двигатели постоянного тока4.3. Замкнутые схемы управления электропривода с ДПТ с использованием микроконтроллера 4.4. Управление двухфазным бесколлекторным электродвигателем постоянного тока без датчиков4.4.1. Принцип действия4.4.2. Управление БКЭПТ без датчиков4.5. Методы устранения помех от ходового двигателя и контроллера
Глава 5. Электропривод на основе линейного двигателя5.1. Конструкция и принцип действия линейного двигателя5.2. Электропривод с линейным асинхронным двигателем5.3. Система управления линейным прецизионным электроприводом на базе сигнального процессора5.4. Информационное обеспечение систем управления ЛД
Глава 6. Микроконтроллерные системы управления электроприводами6.1. Микроконтроллеры для встраиваемых систем управления электроприводом. Семейство «Motor Control» фирмы Analog Devices6.1.1. Общая характеристика семейства «Motor Control»6.1.2. Модуль ШИМ-генератора6.1.3. Модуль АЦП6.1.4. Дополнительные периферийные модули6.1.5. Перспективы развития6.2. Микроконтроллеры для встраиваемых систем управления электроприводом. Серии «DashDSP»и «Mixed Signal DSP» фирмы Analog Devices6.2.1. Общая характеристика семейства «DashDSP»6.2.2. Модуль ШИМ-генератора6.2.3. Модуль АЦП6.2.4. Дополнительные периферийные устройства6.2.5. Серия «Mixed Signal DSP»6.2.6. Отличительные особенности DSP-микроконтроллеров фирмы Analog Devices6.3. Применение DSP микроконтроллеровв управлении вентильными двигателямибез датчика положения ротора6.4. Управление 3-фазными бесщеточными электродвигателями при помощи микроконтроллеров семейства ST7MC компании STMicroelectronics
Глава 7. Специализированные микроконтроллеры фирм Atmel и Infineon для управления электроприводами7.1. Семейство 8-разрядных микроконтроллеров AVR7.1.1. Характеристики AVR-микроконтроллеров7.2. Микроконтроллер серии С166 фирмы Infenion AG для управления электроприводами
Глава 8. Использование интегрированных схем программируемой логики для управления шаговым двигателем8.1. Основы устройства и работы шагового двигателя: Принцип действия шагового двигателя8.2. Сведения о двигателях серии ДБМ8.3. Управление двигателем ДБМ8.4. Составление алгоритма работы блока управления8.5. Разработка внутренней структуры цифрового блока управления8.6. Разработка внутренней структуры программно-логической интегральной схемы
Заключение
Список литературы
Скачать с Depositfiles
radioparty.ru