Под потерей фазы понимают однофазный режим работы электродвигателя в результате отключения питания по одному из проводов трехфазной системы.
Причинами потери фазы электродвигателем могут быть: обрыв одного из проводов, сгорание одного из предохранителей; нарушение контакта в одной из фаз.
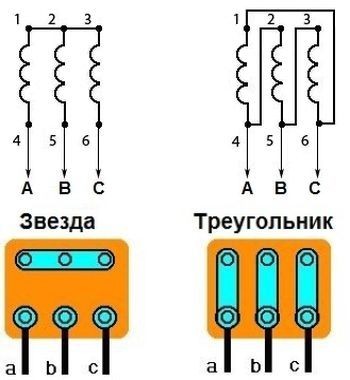
В зависимости от обстоятельств, при которых произошла потеря фазы, могут быть разные режимы работы электродвигателя и последствия, сопутствующие этим режимам. При этом следует принимать во внимание следующие факторы: схему соединения обмоток электродвигателя ("звезда" или "треугольник"), рабочее состояние двигателя в момент потери фазы (потеря фазы может произойти до или после включения двигателя, во время работы под нагрузкой), степень загрузки двигателя и механическую характеристику рабочей машины, число электродвигателей, работающих при потере фазы, и их взаимное влияние.
Здесь следует обратить внимание на особенность рассматриваемого режима. В трехфазном режиме каждая фаза обмотки обтекается током, сдвинутым во времени на одну треть периода. При потере фазы две обмотки обтекаются одним и тем же током, в третьей фазе ток отсутствует. Несмотря на то, что концы обмоток присоединены к двумя фазным проводам трехфазной системы, токи в обеих обмотках совпадают по времени. Такой режим работы называется однофазным.
Магнитное поле, образованное однофазным током, в отличие от вращающегося поля, образованного трехфазной системой токов, является пульсирующим. Оно изменяется во времени, но не перемещается по окружности статора. На рисунке 1, а показан вектор магнитного потока, создаваемого в двигателе при однофазном режиме. Этот вектор не вращается, а лишь изменяется по величине и знаку. Круговое поле сплющивается до прямой линии.

Рисунок 1. Характеристики асинхронного двигателя в однофазном режиме: а — графическое изображение пульсирующего магнитного поля; б — разложение пульсирующего поля на два вращающихся; в — механические характеристики асинхронного двигателя в трехфазном (1) и однофазном (2) режимах работы.
Пульсирующее магнитное поле можно рассматривать состоящим из двух вращающихся навстречу друг другу равных по величине полей (рис. 1, б). Каждое поле взаимодействует с обмоткой ротора и образует вращающий момент. Их суммарное действие создает вращающий момент на валу двигателя.
В том случае, когда потеря фазы произошла до включения двигателя в сеть, на неподвижный ротор действуют два магнитных поля, которые образуют два противоположных по знаку, но равных по величине момента. Их сумма будет равна нулю. Поэтому при пуске двигателя в однофазном режиме он не может развернуться даже при отсутствии нагрузки на валу.
Если потеря фазы произошла в то время, когда ротор двигателя вращался, то на его валу образуется вращающий момент. Это можно объяснить следующим образом. Вращающийся ротор по разному взаимодействует с вращающимися навстречу друг другу полями. Одно из них, вращение которого совпадает с вращением ротора, образует положительный (совпадающий по направлению) момент, другое — отрицательный. В отличие от случая с неподвижным ротором эти моменты будут разными по величине. Их разность будет равна моменту на валу двигателя.
На рисунке 1, в показана механическая характеристика двигателя в однофазном и трехфазном режимах работы. При нулевой скорости момент равен нулю, при появлении вращения в любую сторону на валу двигателя возникает момент.
Если отключение одной из фаз произошло во время работы двигателя, когда его скорость была близка к номинальному значению, вращающий момент часто бывает достаточным для продолжения работы с небольшим снижением скорости. В отличие от трехфазного симметричного режима появляется характерное гудение. В остальном внешние проявления аварийного режима не наблюдаются. Человек, не имеющий опыта работы с асинхронными двигателями, может не заметить изменения характера работы электродвигателя.
Переход электродвигателя в однофазный режим сопровождается перераспределением токов и напряжений между фазами. Если обмотки двигателя соединены по схеме "звезда", то после потери фазы образуется схема, показанная на рисунке 2. Две последовательно соединенные обмотки двигателя оказываются включенными на линейное напряжение Uаb, двигатель при этом оказывается в однофазном режиме работы.
Сделаем небольшой расчет, определим токи, протекающие по обмоткам двигателя и сравним их с токами при трехфазном питании.

Рисунок 2. Соединение обмоток двигателя по схеме "звезда" после потерн фазы
Так как сопротивления Zа и Zв соединены последовательно, напряжения на фазах А и В будут равны половине линейного:

Приближенно величину тока можно определить исходя из следующих соображений.
Пусковой ток фазы А при потере фазы

Пусковой ток фазы А при трехфазном режиме

где Uao — фазовое напряжение сети.
Отношение пусковых токов:

Из соотношения следует, что при потере фазы пусковой ток составляет 86% от величины пускового тока при трехфазном питании. Если учесть, что пусковой ток короткозамкнутого асинхронного двигателя в 6 - 7 раз больше номинального, то получается, что по обмоткам двигателя протекает ток Iiф = 0,86 х 6 = 5,16 Iн, т. е. в пять с лишним раз превышающий номинальный. За короткий промежуток времени такой ток перегреет обмотку.
Из приведенного расчета видно, что рассматриваемый режим работы весьма опасен для двигателя и в случае его возникновения защита должна отключить с незначительной выдержкой времени.
Потеря фазы может произойти и после включения двигателя, когда его ротор будет иметь скорость вращения, соответствующую рабочему режиму. Рассмотрим токи и напряжения обмоток в случае перехода в однофазный режим при вращающемся роторе.
Величина Za зависит от скорости вращения. При пуске, когда скорость вращения ротора равна нулю, она одинакова как для трехфазного, так и для однофазного режима. В рабочем режиме в зависимости от нагрузки и механической характеристики двигателя скорость вращения может быть разной. Поэтому для анализа токовых нагрузок необходим другой подход.
Будем считать, что как в трехфазном, так и в однофазном режиме двигатель развивает. одинаковую мощность. Независимо от схемы включения электродвигателя рабочая машина требует ту же самую мощность, которая необходима для выполнения технологического процесса.
Полагая мощности на валу двигателя равными для обоих режимов, будем иметь:
при трехфазном режиме

при однофазном режиме

где Ua — фазовое напряжение сети; Uao — напряжение на фазе А в однофазном режиме, cos φ3 и cos φ1 — коэффициенты мощности при трехфазном и однофазном режимах соответственно.
Опыты с асинхронным двигателем показывают, что фактически ток возрастает почти вдвое. С некоторым запасом можно считать I1a / I2a = 2.
Для того чтобы судить о степени опасности однофазного режима работы, нужно также знать загрузку двигателя.
В первом приближении будем считать ток электродвигателя в трехфазном режиме пропорциональным его нагрузке на валу. Такое допущение справедливо при нагрузках более 50% от номинального значения. Тогда можно написать Iф = Kз х Iн, где Kз — коэффициент загрузки двигателя, Iн — номинальный ток двигателя.
Ток при однофазном режиме I1ф = 2Kзх Iн, т. е. ток при однофазном режиме будет зависеть от загрузки двигателя. При номинальной нагрузке он равен двойному номинальному току. При нагрузке менее 50% потеря фазы при соединении обмоток двигателя в "звезду" не создает опасного для обмоток превышения тока. В большинстве случаев коэффициент загрузки двигателя меньше единицы. При его значениях порядка 0,6 - 0,75 следует ожидать небольшого превышения тока (на 20— 50%) по сравнению с номинальным. Это существенно для работы защиты, так как именно в этой области перегрузок она действует недостаточно четко.
Для анализа некоторых способов защиты необходимо знать напряжение на фазах двигателя. При заторможенном роторе напряжение на фазах А и В будет равно половине линейного напряжения Uab, а напряжение на фазе С будет равно нулю.
Иначе распределяется напряжение при вращающемся роторе. Дело в том, что его вращение сопровождается образованием вращающегося магнитного поля, которое, действуя на обмотки статора, наводит в них электродвижущую силу. Величина и фаза этой электродвижущей силы таковы, что при скорости вращения, близкой к синхронной, на обмотках восстанавливается симметричная система трехфазного напряжения, а напряжение нейтрали звезды (точка 0) становится равным нулю. Таким образом, при изменении скорости вращения ротора от нуля до синхронной в однофазном режиме работы напряжение на фазах А и В изменяется от значения, равного половине линейного, до значения, равного фазовому напряжению сети. Например, в системе напряжения 380/220 В напряжение на фазах А и В изменяется в пределах 190 - 220 В. Напряжение Uco изменяется от нуля при заторможенном роторе до фазового напряжения 220 В при синхронной скорости. Что же касается напряжения в точке 0, то оно изменяется от значения Uab/2 - до нуля при синхронной скорости.
Если обмотки двигателя соединены по схеме "треугольник", то после потери фазы мы будем иметь схему соединений, показанную на рисунке 3. В этом случае обмотка двигателя с сопротивлением Zab оказывается включенной на линейное напряжение Uab, а обмотка с сопротивлениями Zfc и Zbc — соединенной последовательно и включенной на то же самое линейное напряжение.

Рисунок 3. Соединение обмоток электродвигателя по схеме "треугольник" после потери фазы
В пусковом режиме по обмоткам АВ будет протекать такой же ток, как и при трехфазном варианте, а по обмоткам АС и ВС будет протекать ток в два раза меньший, так как эти обмотки соединены последовательно.
Токи в линейных проводах I'a=I'b будут равны сумме токов в параллельных ветвях: I'А = I'ab + I'bc = 1,5 Iab
Таким образом, в рассматриваемом случае при потере фазы пусковой ток в одной из фаз будет равен пусковому току при трехфазном питании, а линейный ток возрастает менее интенсивно.
Для расчета токов в случае потери фазы после включения двигателя в работу применим тот же метод, что и для схемы "звезда". Будем считать, что как в трехфазном, так и в однофазном режимах двигатель развивает одинаковую мощность.
В этом режиме работы ток в наиболее нагруженной фазе при потере фазы увеличивается вдвое по сравнению с током при трехфазном питании. Ток в линейном проводе будет равен I'А = 3Iab, а при трехфазном питании Ia = 1,73 Iab.
Здесь важно отметить, что в то время как фазовый ток возрастает в 2 раза, линейный ток увеличивается только в 1,73 раза. Это существенно, так как токовая защита реагирует на линейные токи. Расчеты и выводы относительно влияния коэффициента загрузки на ток однофазного режима при соединении "звезда" остаются в силе и для случая схемы "треугольник".
Напряжения на фазах АС и ВС будут зависеть от скорости вращения ротора. При заторможенном роторе Uac' = Ubc' = Uab/2
При скорости вращения, равной синхронной, восстанавливается симметричная система напряжений, т. е. Uac' = Ubc' = Uab.
Таким образом, напряжения на фазах АС и ВС при изменениях скорости вращения от нуля до синхронной будут меняться от значения, равного половине линейного, до значения, равного линейному напряжению.
Токи и напряжения на фазах двигателя при однофазном режиме зависят также и от числа двигателей.
Часто обрыв фазы происходит из-за перегорания одного из предохранителей на питающем фидере подстанции или распределительного устройства. В результате в однофазном режиме оказывается группа потребителей, взаимно влияющих друг на друга. Распределение токов и напряжений зависит от мощности отдельных двигателей и их нагрузки. Здесь возможны различные варианты. Если мощности электродвигателей равны, а их нагрузка одинакова (например, группа вытяжных вентиляторов), то всю группу двигателей можно заменить одним эквивалентным.
studfiles.net
Рабочие характеристики асинхронного двигателя (рис. 13.7) представляют собой графически выраженные зависимости частоты
вращения n2, КПД η, полезного момента (момента на валу) М2, коэффициента мощности cos φ, и тока статора I1от полезной мощности Р2при U1= constf1= const.
Скоростная характеристикаn2=f(P2). Частота вращения ротора асинхронного двигателя
n2 = n1(1 - s).
Скольжение по (13.5)
s = Pэ2/ Pэм, (13.24)
т. е. скольжение двигателя, а следовательно, и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности Рэм. Пренебрегая электрическими потерями в роторе в режиме холостого хода, можно принять Рэ2= 0, а поэтому s ≈ 0 и n20≈ n1. По мере увеличения нагрузки на валу

Рис. 13.7. Рабочие характеристики асинхронного двигателя
двигателя отношение (13.24) растет, достигая значений 0,01—0,08 при номинальной нагрузке. В соответствии с этим зависимость n2=f(P2) представляет собой кривую, слабо наклоненную к оси абсцисс. Однако при увеличении активного сопротивления ротора r2' угол наклона этой кривой увеличивается. В этом случае изменения частоты вращения n2при колебаниях нагрузки Р2возрастают. Объясняется это тем, что с увеличением r2' возрастают электрические потери в роторе [см. (13.3)].
Зависимость М2=f(P2). Зависимость полезного момента на валу двигателя М2от полезной мощности Р2определяется выражением
M2 = Р2/ ω2 = 60 P2/ (2πn2) = 9,55Р2/ n2, (13.25)
где Р2— полезная мощность, Вт; ω2= 2πf 2/ 60 — угловая частота вращения ротора.
Из этого выражения следует, что если n2= const, то график М2=f2(Р2) представляет собой прямую линию. Но в асинхронном двигателе с увеличением нагрузки Р2 частота вращения ротора уменьшается, а поэтому полезный момент на валу М2с увеличением нагрузки возрастает не сколько быстрее нагрузки, а следовательно, график М2=f(P2) имеет криволинейный вид.

Рис. 13.8. Векторная диаграмма асинхронного
двигателя при небольшой нагрузке
Зависимость cos φ1 = f (P2).В связи с тем что ток статора I1имеет реактивную (индуктивную) составляющую, необходимую для создания магнитного поля в статоре, коэффициент мощности асинхронных двигателей меньше единицы. Наименьшее значение коэффициента мощности соответствует режиму х.х. Объясняется это тем, что ток х.х. I0при любой нагрузке остается практически неизменным. Поэтому при малых нагрузках двигателя ток статора невелик и в значительной части является реактивным (I1≈ I0). В результате сдвиг по фазе тока статора , относительно напряжения
, относительно напряжения , получается значительным (φ1≈ φ0), лишь немногим меньше 90° (рис. 13.8). Коэффициент мощности асинхронных двигателей в режиме х.х. обычно не превышает 0,2. При увеличении нагрузки на валу двигателя растет активная составляющая тока I1и
, получается значительным (φ1≈ φ0), лишь немногим меньше 90° (рис. 13.8). Коэффициент мощности асинхронных двигателей в режиме х.х. обычно не превышает 0,2. При увеличении нагрузки на валу двигателя растет активная составляющая тока I1и

Рис. 13.9. Зависимость cos φ1,от нагрузки при
соединении обмотки статора звездой (1) и треугольником (2)
коэффициент мощности возрастает, достигая наибольшего значения (0,80—0,90) при нагрузке, близкой к номинальной. Дальнейшее увелиичение нагрузки сопровождается уменьшением cos φ1что объясняется возрастанием индуктивного сопротивления ротора (x2s) за счет увеличения скольжения, а следовательно, и частоты тока в роторе. В целях повышения коэффициента мощности асинхронных двигателей чрезвычайно важно, чтобы двигатель работал всегда или по крайней мере значительную часть времени с нагрузкой, близкой к номинальной. Это можно обеспечить лишь при правильном выборе мощности двигателя. Если же двигатель работает значительную часть времени недогруженным, то для повышения cos φ1, целесообразно подводимое к двигателю напряжение U1уменьшить. Например, в двигателях, работающих при соединении обмотки статора треугольником, это можно сделать пересоединив обмотки статора в звезду, что вызовет уменьшение фазного напряжения в раз. При этом магнитный поток статора, а следовательно, и намагничивающий ток уменьшаются примерно в
раз. При этом магнитный поток статора, а следовательно, и намагничивающий ток уменьшаются примерно в раз. Кроме того, активная составляющая тока статора несколько увеличивается. Все это способствует повышению коэффициента мощности двигателя. На рис. 13.9
раз. Кроме того, активная составляющая тока статора несколько увеличивается. Все это способствует повышению коэффициента мощности двигателя. На рис. 13.9
представлены графики зависимости cos φ1, асинхронного двигателя от нагрузки при соединении обмоток статора звездой (кривая 1) и треугольником (кривая 2).
22. Пуск асинхронного двигателя с фазным ротором. Регулирование частоты вращения асинхронных двигателей. Асинхронный преобразователь частоты.
studfiles.net
Рабочими характеристиками называют графические зависимости частоты вращения п2 (или скольжения s),момента на валу М2 , тока статора I1 , коэффициента полезного действия η и cos φ1 от полезной мощности Р2 при U1 = const и f1 = const. Их определяют экспериментально или путем расчета по схеме замещения или круговой диаграмме.
Примерный вид рабочих характеристик асинхронного двигателя показан на рис. 4.25. Частота вращения, ток статора, момент на валу, потребляемая и полезная мощности приведены на графике в относительных единицах. Рабочие характеристики строят только для зоны практически устойчивой работы двигателя, т. е. до скольжения (1,1 ÷ l,2)sном .
 Рис. 4.25. Рабочие характеристики асинхронного двигателя(а)и типичная кривая КПД электрической машины и ее потерь (б).
Рис. 4.25. Рабочие характеристики асинхронного двигателя(а)и типичная кривая КПД электрической машины и ее потерь (б).
Частота вращения ротора. При переходе от режима холостого хода к режиму полной нагрузки частота вращения n2 изменяется незначительно, так как при проектировании двигателей для уменьшения потерь мощности в роторе ΔРэл2 необходимо, чтобы скольжение при номинальном режиме не превышало 0,02—0,06. Следовательно, скоростная характеристика асинхронного двигателя является «жесткой».
Вращающий момент на валу двигателя. Зависимость между моментом М2 и полезной мощностью Р2 определяется соотношением
Р2 = М2 ω2 ,
где ω2 — угловая скорость ротора.
Ток статора. Ток I1 получают по круговой диаграмме непосредственным измерением отрезков, соединяющих начало координат с точками А1 , А2 , А3 и другими на окружности токов. Активная составляющая тока пропорциональна полезной мощности. Реактивная составляющая в диапазоне рабочих нагрузок изменяется мало, так как она определяется главным образом током холостого хода, который составляет 20—40% от номинального тока.
Коэффициент мощности. При переходе от режима холостого хода к режиму номинальной нагрузки коэффициент мощности возрастает от значения cos φ1 = 0,09 ÷ 0,18 до некоторой максимальной величины: для двигателей малой и средней мощности (1 -–100 кВт) cos φ1 = 0,7 ÷ 0,9, а для двигателей большой мощности (свыше 100 кВт) cos φ1 =0,90 ÷ 0,95.
Коэффициент полезного действия. Зависимость η от полезной мощности Р2 имеет такой же характер, как и для трансформатора. Эта зависимость имеет общий характер для большинства электрических машин.
 Экспериментальное исследование асинхронных двигателей проводится с целью определения параметров схемы замещения (рис. 4.8). Программа исследований включает два опыта: опыт холостого хода и опыт короткого замыкания. Эти опыты легко реализуются, для их проведения требуется минимальная мощность установленного оборудования. Экспериментальные исследования асинхронных двигателей в рабочих режимах, как правило, не проводятся в виду их большой трудоемкости и стоимости. Характеристики асинхронных двигателей в рабочих режимах получают расчетным путем по схеме замещения.
Экспериментальное исследование асинхронных двигателей проводится с целью определения параметров схемы замещения (рис. 4.8). Программа исследований включает два опыта: опыт холостого хода и опыт короткого замыкания. Эти опыты легко реализуются, для их проведения требуется минимальная мощность установленного оборудования. Экспериментальные исследования асинхронных двигателей в рабочих режимах, как правило, не проводятся в виду их большой трудоемкости и стоимости. Характеристики асинхронных двигателей в рабочих режимах получают расчетным путем по схеме замещения.
Опыт холостого хода.
Схема экспериментальной установки представлена на рис. 4.14. Схема включает кроме испытуемого двигателя (АД) индукционный регулятор (ИР) для регулирования напряжения статора АД, измерительный комплект (ИК) для регистрации тока, активной мощности и напряжения статора, тахогенератор (ТГ) для измерения частоты вращения n и машину постоянного тока (МПТ) для затормаживания ротора.

Опыт холостого хода проводится без нагрузки на валу (ключ К разомкнут) для нескольких значений напряжения  в диапазоне
в диапазоне  . Измеряются фазные токи
. Измеряются фазные токи  и активная мощность
и активная мощность  , подводимая к обмотке статора. По данным опыта строят зависимости
, подводимая к обмотке статора. По данным опыта строят зависимости  ,
,  ,
,  . Вид этих зависимостей представлен на рис. 4.15.
. Вид этих зависимостей представлен на рис. 4.15.
Опыт короткого замыкания.

В опыте короткого замыкания ротор асинхронного двигателя должен быть заторможен ( ). Это достигается с помощью машины постоянного тока (рис. 4.14). Ключ К замыкается, а в обмотку возбуждения подается постоянный ток. Опыт проводится при различных значениях подводимого напряжения
). Это достигается с помощью машины постоянного тока (рис. 4.14). Ключ К замыкается, а в обмотку возбуждения подается постоянный ток. Опыт проводится при различных значениях подводимого напряжения  , так чтобы ток статора
, так чтобы ток статора  находился в пределах
находился в пределах  . По данным опыта короткого замыкания строят зависимости
. По данным опыта короткого замыкания строят зависимости  ,
,  . В рассматриваемом диапазоне токов
. В рассматриваемом диапазоне токов  характеристика
характеристика  носит прямолинейный характер (рис. 4.17).
носит прямолинейный характер (рис. 4.17).
studfiles.net
Рабочими характеристиками называются зависимости частоты вращения n (или скольжения s), момента на валу М, тока статора  , КПД и
, КПД и  от полезной мощности
от полезной мощности  при
при  и
и  .
.
Рабочие характеристики можно получить опытным либо расчетным путем. Ниже приводится алгоритм расчета рабочих характеристик по схеме замещения. Задается скольжение s в рабочем диапазоне  . Для каждого значения s внутри этого диапазона рассчитываются следующие величины.
. Для каждого значения s внутри этого диапазона рассчитываются следующие величины.
1. Ток обмотки ротора и его фаза
 ;
;
 .
.
2. Ток намагничивания и его фаза
 ;
;
 .
.
3. Ток обмотки статора
 .
.
4. Потери
 .
.
Потери  принимаются постоянными, а потери
принимаются постоянными, а потери  зависят от тока нагрузки.
зависят от тока нагрузки.
 |
5. Электромагнитный момент
 .
.
6. Полезная мощность на валу
 .
.
Потери  определяются из опыта холостого хода, а добавочные рассчитываются приближенно
определяются из опыта холостого хода, а добавочные рассчитываются приближенно  .
.
7. Потребляемая двигателем мощность
 .
.
8. Коэффициент мощности
 .
.
9. Коэффициент полезного действия
 .
.
Примерный вид рабочих характеристик показан на рис. 4.18. Асинхронные двигатели обладают достаточно жесткой скоростной характеристикой  . При переходе от холостого хода к режиму номинальной нагрузки скольжение возрастает незначительно (до 2-5%). С ростом нагрузки монотонно увеличиваются ток статора, потребляемая мощность и электромагнитный момент . КПД имеет максимум в зоне
. При переходе от холостого хода к режиму номинальной нагрузки скольжение возрастает незначительно (до 2-5%). С ростом нагрузки монотонно увеличиваются ток статора, потребляемая мощность и электромагнитный момент . КПД имеет максимум в зоне  , где потери постоянные
, где потери постоянные  равны потерям переменным
равны потерям переменным  . Коэффициент мощности в режиме холостого хода мал, обычно не более 0,2. С увеличением нагрузки
. Коэффициент мощности в режиме холостого хода мал, обычно не более 0,2. С увеличением нагрузки  потребляемая реактивная мощность меняется незначительно, поэтому
потребляемая реактивная мощность меняется незначительно, поэтому  растет, достигая значений
растет, достигая значений  для двигателей средней и большой мощности.
для двигателей средней и большой мощности.
4.9. Асинхронные короткозамкнутые двигатели сулучшенными пусковыми свойствами
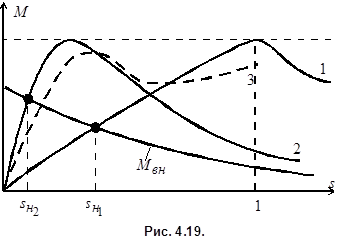 |
Многие электроприводы для достижения высокого быстродействия и надежности запуска требуют повышенного пускового момента, близкого к максимальному. Этой цели можно достичь, выполнив обмотку ротора с повышенным активным сопротивлением (кривая 1 рис. 4.19). Однако рабочая ветвь механической характеристики такого двигателя оказывается весьма «мягкой», поэтому в номинальном режиме двигатель будет работать с большим скольжением, что связано со значительными потерями и низкими энергетическими показателями. Для достижения высоких энергетических показателей желательно иметь «жесткую» механическую характеристику (кривая 2 рис. 4.19). Получить механическую характеристику, сочетающую положительные свойства характеристик 1 и 2, можно, если использовать поверхностный эффект в стержнях роторной обмотки для повышения активного сопротивления обмотки в начале пуска, когда частота тока в роторе  близка к частоте сети. По мере разгона двигателя частота тока в роторе падает, поверхностный эффект ослабляется и сопротивление ротора снижается. Вид механической характеристики такого двигателя представлен кривой 3 на рис. 4.19. Существует несколько конструктивных решений, обеспечивающих использование поверхностного эффекта.
близка к частоте сети. По мере разгона двигателя частота тока в роторе падает, поверхностный эффект ослабляется и сопротивление ротора снижается. Вид механической характеристики такого двигателя представлен кривой 3 на рис. 4.19. Существует несколько конструктивных решений, обеспечивающих использование поверхностного эффекта.
poznayka.org
РАБОТА ПО ЭЛЕКТРОТЕХНИКЕ
"Рабочие характеристики асинхронного двигателя"
Введение
Асинхронная электрическая машина – это электрическая машина переменного тока, у которой частота вращения ротора не равна частоте вращения магнитного поля статора и зависит от нагрузки. Используется в основном как двигатель и как генератор. Статор имеет пазы, в которые укладывается одно- или многофазная (чаще трёхфазная) обмотка, подключаемая к сети переменного тока. Эта обмотка предназначена для создания подвижного магнитного поля, вращающегося кругового- у трёхфазных и пульсирующего или вращающегося эллиптического-у однофазных машин. Ротор – вращающаяся часть электрической машины, предназначен также для создания магнитного поля, которое, взаимодействуя с полем статора, ведёт к созданию электромагнитного вращающего момента, определяющего направление преобразования энергии. У генераторов этот момент носит тормозной характер, противодействуя вращающему моменту первичного двигателя, приводящего в движение ротор. У двигателей, наоборот, этот момент является движущим, преодолевающим сопротивление приводимого во вращение ротором механизма.
Асинхронный генератор-это асинхронная электрическая машина, работающая в генераторном режиме. Вспомогательный источник электрического тока небольшой мощности и тормозное устройство (в электроприводе).
Асинхронный электродвигатель – это асинхронная электрическая машина, работающая в двигательном режиме. Наиболее распространен трехфазный асинхронный электродвигатель (изобретен в 1889 М.О. Доливо-Добровольским). Асинхронные электродвигатели отличаются относительной простотой конструкции и надежностью в эксплуатации, однако имеют ограниченный диапазон частоты вращения и низкий коэффициент мощности при малых нагрузках. Мощность от долей Вт до десятков МВт.
1. Асинхронный двигатель
1.1 Частота вращения магнитного поля и ротора
Пусть n1 – частота вращения магнитного поля. Многофазная система переменного тока создаёт вращающееся магнитное поле, частота вращения которого в минуту n1=60f1/p, где f1 – частота тока, p – число пар полюсов, образуемых каждой фазой статорной обмотки.
n2 – частота вращения ротора. Если ротор вращается с частотой не равной частоте вращения магнитного поля (n2≠n1), то такая частота называется асинхронной. В асинхронном двигателе рабочий процесс может протекать только при асинхронной частоте.
При работе частота вращения ротора всегда меньше частоты вращения поля.
(n2n1)
1.2 Принцип действия асинхронного двигателя
В асинхронных двигателях вращающееся магнитное поле создаётся трёхфазной системой при включении её в сеть переменного тока. Вращающееся магнитное поле статора пересекает проводники обмотки ротора и индуцирует в них э.д.с. Если обмотка ротора замкнута на какое-либо сопротивление или накоротко, то в ней под действием индуцируемой э.д.с. проходит ток. В результате взаимодействия тока в обмотке ротора с вращающимся магнитным полем обмотки статора создаётся вращающий момент, под действием которого ротор начинает вращаться по направлению вращения магнитного поля. Для изменения направления вращения ротора необходимо поменять местами по отношению к зажимам сети любые два из трёх проводов, соединяющих обмотку статора с сетью.
1.3 Устройство асинхронного двигателя
Сердечник статора набирается из стальных пластин, толщиной 0,35 или 0,5 мм. Пластины штампуют с пазами и крепят в станине двигателя. Станину устанавливают на фундаменте. В продольные пазы статора укладывают проводники его обмотки, которые соединяют между собой так, что образуется трёхфазная система. Для подключения обмоток статора к трёхфазной сети они могут быть соединены звездой или треугольником. Это даёт возможность включить двигатель в сеть с разным напряжением. Для более низких напряжений (220/127 В) обмотка статора соединяется треугольником, для более высоких (380/220 В) – звездой. Сердечник ротора также набирают из стальных пластин толщиной 0,5 мм. Пластины штампуют с пазами и собирают в пакеты, которые крепят на валу машины. Из пакетов образуется цилиндр с продольными пазами, в которых укладывают проводники обмотки ротора. В зависимости от типа обмотки ротора асинхронные машины могут быть с фазным и короткозамкнутым ротором. В короткозамкнутую обмотку нельзя включить сопротивление. В Фазной обмотке проводники соединены между собой, образуя трёхфазную систему. Обмотки трёх фаз соединены звездой. Обмотку ротора можно замкнуть на сопротивление или накоротко. Двигатели с короткозамкнутым ротором проще и дешевле, однако двигатели с фазным ротором обладают лучшими пусковыми и регулировочными свойствами (они используется при больших мощностях). Мощность асинхронных двигателей колеблется от нескольких десятков Ватт до 15000 кВт при напряжении обмотки статора до 6 кВ. Недостаток асинхронных двигателей – низкий коэффициент мощности.
1.4 Работа асинхронного двигателя под нагрузкой
n1 – частота вращения магнитного поля статора. n2 – частота вращения ротора.
n1 >n2
Магнитное поле статора вращается в том же направлении, что и ротор и скользит относительно ротора с частотой ns= n1 – n2
Отставание ротора от вращающегося магнитного поля статора характеризуется скольжением S= ns / n1, => S =(n1 – n2) / n1
Если ротор неподвижен, то n2=0, S=(n1 – n2) / n1, => S = n1 / n1=1
Если ротор вращается синхронно с магнитным полем, то скольжение S= 0.
При холостом ходе, то есть при отсутствии нагрузки на валу двигателя скольжение ничтожно мало и его можно принять равным 0. Нагрузкой на валу ротора может служить, например резец токарного станка. Он создаёт тормозной момент. При равенстве вращающего и тормозного момента двигатель будет работать устойчиво. Если нагрузка на валу увеличилась, то тормозной момент станет больше вращающего и частота вращения ротора n2 уменьшится. Согласно формуле S =(n1 – n2) / n1 скольжение увеличится. Так как магнитное поле статора скользит относительно ротора с частотой ns= n1 – n2, то оно будет пересекать проводники ротора чаще, в них увеличится ток и двигательный вращающий момент, который вскоре станет равным тормозному. При уменьшении нагрузки, тормозной момент становится меньше вращающего, увеличивается n2 и уменьшается S. Уменьшается Э.Д.С и ток ротора и вращающий момент вновь равен тормозному. Магнитный поток в воздушном зазоре машины при любом изменении нагрузки остаётся примерно постоянным.
2. Рабочие характеристики асинхронного двигателя
Рабочие характеристики асинхронного двигателя есть зависимость
S – скольжения
n2 – частоты вращения ротора
М – развиваемого момента
I1-потребляемого тока
Р1-расходуемой мощности
СОSφ-коэффициента мощности
КПДη
От полезной мощности Р2 на валу машины.
Эти характеристики снимаются при естественных условиях. Частота тока f1 и напряжение U1 остаются постоянными. Изменяется только нагрузка на валу двигателя.
При увеличении нагрузки на валу двигателя S увеличивается. При холостом ходе двигателя n2≈n1, и S≈0. При номинальной нагрузке скольжение обычно составляет от 3 до 5%.
При увеличении нагрузки на валу двигателя частота вращения n2 уменьшается. Однако, изменение частоты вращения при увеличении нагрузки от 0 до номинальной очень незначительны и не превышают 5%. Поэтому, скоростная характеристика асинхронного двигателя является жёсткой. Кривая имеет очень малый наклон к горизонтальной оси.
Вращающий момент М, развиваемый двигателем, уравновешен тормозным моментом на валу Мт и моментом М0, идущим на преодоление механических потерь, то есть М= Мт + М0 =Р2/Ω2+ М0, где Р2 – полезная мощность двигателя, Ω2-угловая скорость ротора. При холостом ходе М= М0. С увеличением нагрузки вращающий момент также увеличивается, причём за счёт некоторого уменьшения частоты вращения ротора увеличение вращающего момента происходит быстрее, чем полезной мощности на валу.
Ток I1, потребляемый двигателем из сети неравномерно изменяется с увеличением нагрузки на валу двигателя. При холостом ходе СОSφ-коэффициента мощности – мал. И ток имеет большую реактивную составляющую. При малых нагрузках на валу двигателя активная составляющая тока статора меньше реактивной составляющей, поэтому активная составляющая тока незначительно влияет на ток I1. При больших нагрузках активная составляющая тока статора становится больше реактивной и изменение нагрузки вызывает значительное изменение тока I1.
Графическая зависимость потребляемой двигателем мощности Р1 изображается почти прямой линией, незначительно отклоняющейся вверх при больших нагрузках, что объясняется увеличением потерь в обмотках статора и ротора с возрастанием нагрузки.
Зависимость СОSφ-коэффициента мощности – от нагрузки на валу двигателя следующая. При холостом ходе СОSφ мал, порядка 0,2. Так как активная составляющая тока статора, обусловленная потерями мощности в машине, мала по сравнению с реактивной составляющей этого тока, создающей магнитный поток. При увеличении нагрузки на валу СОSφ возрастает, достигая наибольшего значения 0,8–0,9, в результате увеличения активной составляющей тока статора. При очень больших нагрузках происходит некоторое уменьшение СОSφ, так как в следствие значительного увеличения скольжения и частоты тока в роторе возрастает реактивное сопротивление обмотки ротора.
Кривая КПДη имеет такой же вид как в любой машине или трансформаторе. При холостом ходе КПД=0. С увеличением нагрузки на валу двигателя КПД резко увеличивается, а затем уменьшается. Наибольшего значения КПД достигает при такой нагрузке, когда потери мощности в стали и механические потери, не зависящие от нагрузки, равны потери мощности в обмотках статора и ротора, зависящим от нагрузки.
globuss24.ru
Рабочие характеристики асинхронного двигателя представляют собой графически выраженные зависимости частоты вращения  , КПД
, КПД  , полезного момента (момента на валу)
, полезного момента (момента на валу)  , коэффициента мощности
, коэффициента мощности  и тока статора
и тока статора  от полезной мощности
от полезной мощности  при
при  и
и  .
.
Скоростная характеристика  . Частота вращения ротора асинхронного двигателя
. Частота вращения ротора асинхронного двигателя

Рис. 62. Рабочие характеристики асинхронного двигателя

Скольжение по (13.5)  , (13.24) т. е. скольжение двигателя, а следовательно, и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности
, (13.24) т. е. скольжение двигателя, а следовательно, и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности  . Пренебрегая электрическими потерями в роторе в режиме холостого хода, можно принять
. Пренебрегая электрическими потерями в роторе в режиме холостого хода, можно принять  , а поэтому
, а поэтому  и
и  . По мере увеличения нагрузки на валу двигателя отношение (13.24) растет, достигая значений 0,01-0,08 при номинальной нагрузке. В соответствии с этим зависимость представляет собой кривую, слабо наклоненную к оси абсцисс. Однако при увеличении активного сопротивления ротора
. По мере увеличения нагрузки на валу двигателя отношение (13.24) растет, достигая значений 0,01-0,08 при номинальной нагрузке. В соответствии с этим зависимость представляет собой кривую, слабо наклоненную к оси абсцисс. Однако при увеличении активного сопротивления ротора  угол наклона этой кривой увеличивается. В этом случае изменения частоты вращения при колебаниях нагрузки возрастают. Объясняется это тем, что с увеличением возрастают электрические потери в роторе [см. (13.3)].
угол наклона этой кривой увеличивается. В этом случае изменения частоты вращения при колебаниях нагрузки возрастают. Объясняется это тем, что с увеличением возрастают электрические потери в роторе [см. (13.3)].
Зависимость  . Зависимость полезного момента на валу двигателя от полезной мощности Р2 определяется выражением
. Зависимость полезного момента на валу двигателя от полезной мощности Р2 определяется выражением
 , (13.25)
, (13.25)
где: – полезная мощность, Вт;  – угловая частота вращения ротора.
– угловая частота вращения ротора.

Рис. 63. Векторная диаграмма асинхронного двигателя при большой нагрузке
Из этого выражения следует, что если  , то график
, то график  представляет собой прямую линию. Но в асинхронном двигателе с увеличением нагрузки частота вращения ротора уменьшается, а поэтому полезный момент на валу с увеличением нагрузки возрастает несколько быстрее нагрузки, а следовательно, график имеет криволинейный вид.
представляет собой прямую линию. Но в асинхронном двигателе с увеличением нагрузки частота вращения ротора уменьшается, а поэтому полезный момент на валу с увеличением нагрузки возрастает несколько быстрее нагрузки, а следовательно, график имеет криволинейный вид.
Зависимость  . В связи с тем что ток статора имеет реактивную (индуктивную) составляющую, необходимую для создания магнитного поля в статоре, коэффициент мощности асинхронных двигателей меньше единицы. Наименьшее значение коэффициента мощности соответствует режиму х.х. Объясняется это тем, что ток х.х.
. В связи с тем что ток статора имеет реактивную (индуктивную) составляющую, необходимую для создания магнитного поля в статоре, коэффициент мощности асинхронных двигателей меньше единицы. Наименьшее значение коэффициента мощности соответствует режиму х.х. Объясняется это тем, что ток х.х.  при любой нагрузке остается практически неизменным. Поэтому при малых нагрузках двигателя ток статора невелик и в значительной части является реактивным
при любой нагрузке остается практически неизменным. Поэтому при малых нагрузках двигателя ток статора невелик и в значительной части является реактивным  . В результате сдвиг по фазе тока статора
. В результате сдвиг по фазе тока статора  относительно напряжения
относительно напряжения  получается значительным
получается значительным  , лишь немногим меньше 90° (рис. 63). Коэффициент мощности асинхронных двигателей в режиме х.х. обычно не превышает 0,2.
, лишь немногим меньше 90° (рис. 63). Коэффициент мощности асинхронных двигателей в режиме х.х. обычно не превышает 0,2.

Рис. 64. Зависимость , от нагрузки при соединении обмотки статора
звездой (1) и треугольником (2)
При увеличении нагрузки на валу двигателя растет активная составляющая тока и коэффициент мощности возрастает, достигая наибольшего значения (0,80—0,90) при нагрузке, близкой к номинальной. Дальнейшее увеличение нагрузки сопровождается уменьшением , что объясняется возрастанием индуктивного сопротивления ротора  за счет увеличения скольжения, а следовательно, и частоты тока в роторе. В целях повышения коэффициента мощности асинхронных двигателей чрезвычайно важно, чтобы двигатель работал всегда или по крайней мере значительную часть времени с нагрузкой, близкой к номинальной. Это можно обеспечить лишь при правильном выборе мощности двигателя. Если же двигатель работает значительную часть времени недогруженным, то для повышения целесообразно подводимое к двигателю напряжение
за счет увеличения скольжения, а следовательно, и частоты тока в роторе. В целях повышения коэффициента мощности асинхронных двигателей чрезвычайно важно, чтобы двигатель работал всегда или по крайней мере значительную часть времени с нагрузкой, близкой к номинальной. Это можно обеспечить лишь при правильном выборе мощности двигателя. Если же двигатель работает значительную часть времени недогруженным, то для повышения целесообразно подводимое к двигателю напряжение  уменьшить. Например, в двигателях, работающих при соединении обмотки статора треугольником, это можно сделать пересоединив обмотки статора в звезду, что вызовет уменьшение фазного напряжения в
уменьшить. Например, в двигателях, работающих при соединении обмотки статора треугольником, это можно сделать пересоединив обмотки статора в звезду, что вызовет уменьшение фазного напряжения в  раз. При этом магнитный поток статора, а следовательно, и намагничивающий ток уменьшаются примерное раз. Кроме того, активная составляющая тока статора несколько увеличивается. Все это способствует повышению коэффициента мощности двигателя. На рис. 64 представлены графики зависимости асинхронного двигателя от нагрузки при соединении обмоток статора звездой (кривая 1) и треугольником (кривая 2).
раз. При этом магнитный поток статора, а следовательно, и намагничивающий ток уменьшаются примерное раз. Кроме того, активная составляющая тока статора несколько увеличивается. Все это способствует повышению коэффициента мощности двигателя. На рис. 64 представлены графики зависимости асинхронного двигателя от нагрузки при соединении обмоток статора звездой (кривая 1) и треугольником (кривая 2).
www.poznayka.org
Рабочими характеристиками называются зависимости частоты вращения n (или скольжения s), момента на валу М, тока статора , КПД и от полезной мощности при и .
Рабочие характеристики можно получить опытным либо расчетным путем. Ниже приводится алгоритм расчета рабочих характеристик по схеме замещения. Задается скольжение s в рабочем диапазоне . Для каждого значения s внутри этого диапазона рассчитываются следующие величины.
1. Ток обмотки ротора и его фаза
;
.
2. Ток намагничивания и его фаза
;
.
3. Ток обмотки статора
.
4. Потери
.
Потери принимаются постоянными, а потери зависят от тока нагрузки.
| |
5. Электромагнитный момент
.
6. Полезная мощность на валу
.
Потери определяются из опыта холостого хода, а добавочные рассчитываются приближенно .
7. Потребляемая двигателем мощность
.
8. Коэффициент мощности
.
9. Коэффициент полезного действия
.
Примерный вид рабочих характеристик показан на рис. 4.18. Асинхронные двигатели обладают достаточно жесткой скоростной характеристикой . При переходе от холостого хода к режиму номинальной нагрузки скольжение возрастает незначительно (до 2-5%). С ростом нагрузки монотонно увеличиваются ток статора, потребляемая мощность и электромагнитный момент . КПД имеет максимум в зоне , где потери постоянные равны потерям переменным . Коэффициент мощности в режиме холостого хода мал, обычно не более 0,2. С увеличением нагрузки потребляемая реактивная мощность меняется незначительно, поэтому растет, достигая значений для двигателей средней и большой мощности.
4.9. Асинхронные короткозамкнутые двигатели сулучшенными пусковыми свойствами
| |
Многие электроприводы для достижения высокого быстродействия и надежности запуска требуют повышенного пускового момента, близкого к максимальному. Этой цели можно достичь, выполнив обмотку ротора с повышенным активным сопротивлением (кривая 1 рис. 4.19). Однако рабочая ветвь механической характеристики такого двигателя оказывается весьма «мягкой», поэтому в номинальном режиме двигатель будет работать с большим скольжением, что связано со значительными потерями и низкими энергетическими показателями. Для достижения высоких энергетических показателей желательно иметь «жесткую» механическую характеристику (кривая 2 рис. 4.19). Получить механическую характеристику, сочетающую положительные свойства характеристик 1 и 2, можно, если использовать поверхностный эффект в стержнях роторной обмотки для повышения активного сопротивления обмотки в начале пуска, когда частота тока в роторе близка к частоте сети. По мере разгона двигателя частота тока в роторе падает, поверхностный эффект ослабляется и сопротивление ротора снижается. Вид механической характеристики такого двигателя представлен кривой 3 на рис. 4.19. Существует несколько конструктивных решений, обеспечивающих использование поверхностного эффекта.
www.poznayka.org