Вот это совершенно неожиданный поворот, для нашего блога. Но пора писать не только про розетки, светильники и другие электротехнические изделия. Пора поговорить о том, без чего наша жизнь не возможна, но это тоже имеет огромное отношение к электрике. Я бы даже сказал, что такие двигатели это очень большие подмастерья нашей жизни. Посудите сами, они используются настолько широко, что голова идет кругом. Вы можете встретить их почти в любой сфере жизни — от газонокосилок и лифтов, до гидроэнергетики. Сегодня я предлагаю начать разговор про асинхронные и синхронные двигатели. Плюс, нам с вами нужно разобраться в том, что такое магнитные поля, что такое статор и ротор, и еще много чего интересного.

На картинке выше изображено электромагнитное поле. Это фундаментальное физическое поле, на котором основана масса физических процессов, включая движущую силу синхронных и асинхронных двигателей. Оно взаимодействует с электрически заряженными частицами, а так же с телами имеющими собственные магнитные поля. Такое поле представляет собой смесь электрического и магнитного полей, которые являются одной сущностью, но в то же время могут порождать друг друга. Изучение физических свойств электромагнитного поля, это удел электродинамики. Нам с вами сейчас нужно знать лишь то, что это поток фотонов, который двигается в определенных пределах. И именно это поле, в конечном итоге заставляет крутиться двигатель.
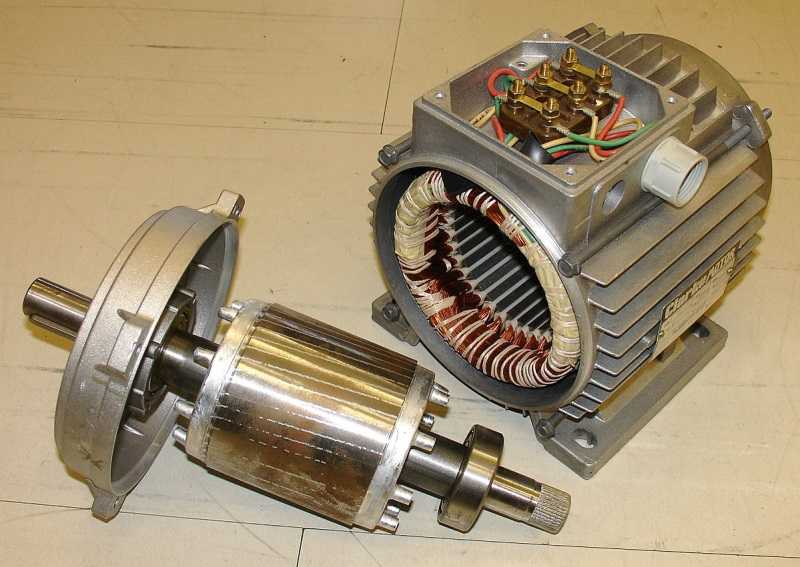
Асинхронная машина — это двигатель, частота вращения ротора которого, медленнее нежели движение электромагнитного поля создаваемого статором. Это двигатель берет питание от электричества, и может быть как двигателем как и генератором. Но о режимах работы такой машины мы поговори позже, а пока перейдем к конструктиву. Асинхронная машина имеет в своей конструкции две основные части — статор и ротор. Статор — как правило неподвижная, внешняя часть двигателя. Ротор — внутренняя часть машины, которая вращается. Между статором и ротором всегда должен быть воздушный зазор, поэтому в двигателе есть много вспомогательных деталей. С помощью этих деталей обеспечивается возможность кручения ротора, жесткость конструкции, и так далее. Так как двигатели имеют либо одну, либо три фазы, обмотки статора, всегда соответствуют их числу. Очень редко асинхронные двигатели имеют многофазную обмотку, иногда число фаз доходит до десяти. Но такие двигатели имеют невероятно низкий коэффициент полезного действия, их используют только в тех местах, где нужны двигатели с легко управляемой, низкой частотой вращения. Число оборотов однофазной асинхронной машины может доходить до 3000 оборотов, трехфазной до 1000. Обмотка статора асинхронного двигателя, согласно количеству фаз, равномерно намотана на него. Так же статор имеет магнитопровод, который чаще всего собирается из очень тонких пластин, который сделаны из электрической стали. Магнитопровод по такому же принципу делается и в роторе, он максимально снижает потери электричества. Теперь о роторах, они бывают двух основных типов — фазный и короткозамкнутый. Разница непосредственно в обмотке ротора. Фазный ротор имеет трехфазную обмотку, выведенную на контактные кольца. Такой метод обмотки позволяет плавно регулировать скорость вращения. При короткозамкнутом методе обмотки, она выполняется из алюминиевых, медных или латунных стержней. Такой метод является более грубым в управлении.

Теперь о том, зачем же нужно было говорить про магнитное поле. Постараюсь рассказать то, что происходит в асинхронном двигателе в момент его работы. На обмотку статора подается напряжение. Это напряжение, как мы помним из статьи про трансформаторы,создает ток в обмотках ротора, и возникают два магнитных поля. Из-за того, что статор держится статичным начинает вращаться ротор, и вот двигатель работает. Стоит отметить, что для лучшего, направленного вращения, обмотки сдвинуты относительно друг друга на 120ᵒ. Мы с вами говорили, про то, что у асинхронной машины есть два режима работы — двигательный и генераторный. С двигателем все понятно, в этот момент просто вращается ротор, выполняя далее ту или иную работу. Двигателем машина считается, если скорость вращения ротора меньше скорости вращения электромагнитного поля. Если же благодаря помощи из вне разогнать ротор быстрее скорости вращения электромагнитного поля, то такая машина начнет генерировать энергию. Вот так работают асинхронные машины.

Сегодня мы с вами обсудили очень сложную тему простыми словами. Что мы имеем в итоге? Асинхронная машина— повсеместно используемый электрический двигатель, работающий за счет создания внутри электромагнитного поля. Теперь, конда вы будете на даче, косить газон с помощью электрического триммера, вы будете знать, что происходит в момент ее включения в ее двигателе. Но тогда возникает логичный вопрос: Если коса заведена, и ротор вращается, почему пока не нажмешь на кнопку, леска не начнет крутиться? Потому, что когда вы нажимаете на кнопку, происходит сцепление ротора двигателя и вала, который вращает леску. Так что кнопка — своего рода сцепление.
До новых встреч.
fixup.ru
Двигатели переменного тока (а.с. motor), как правило, применяются в тяжелых эксплуатационных условиях, однако они находят все большее распространение в системах промышленного управления, например в качестве сервомоторов. Некоторые преимущества двигателей переменного тока перечислены ниже:
экономичность;
надежная и простая конструкция;
высокая эксплуатационная надежность;
простое энергопитание;
отсутствие коммутатора;
практическое отсутствие дуговых явлений (поскольку нет коммутаторов).
Отрицательными чертами двигателей переменного тока являются более низкий момент начала движения, чем у двигателей постоянного тока, и более сложные цепи управления. Однако преимущества систем привода переменного тока таковы, что они успешно конкурируют с двигателями постоянного тока в роботах, манипуляторах и других промышленных системах силового привода.
Широкое применение двигателей переменного тока в качестве сервомоторов стало возможным по мере развития силовой электроники в сочетании с новыми методами управления. Применение микроэлектроники обеспечивает вполне приемлемое управление частотой питающего напряжения. Вращающий момент двигателя нельзя измерить так же просто, как у двигателей постоянного тока, однако существуют способы его оперативной (on-line) оценки. Из-за жестких временных требований для управления должны использоваться микропроцессоры со специальной архитектурой, обеспечивающей очень высокую скорость вычислений, - цифровые сигнальные процессоры (Digital Signal Processors — DSP).
У асинхронного (индукционного) двигателя магнитное поле статора не постоянно, в отличие от двигателя постоянного тока. В простейшей (двухполюсной) машине имеются три статорные обмотки, расположенные вокруг статора под углом 120° друг относительно друга. Когда по ним подается трехфазное переменное напряжение, результирующий магнитный поток статора вращается с частотой приложенного наложения. Поскольку к обмотке ротора не подводится никакого внешнего питания (она короткозамкнута), то нет необходимости в щеточных коммутирующих устройствах.
Вращающееся поле статора пересекает обмотки ротора и индуцирует в них ток. Результирующий поток ротора взаимодействует с вращающимся потоком статора и создает вращающий момент в направлении вращения поля статора. Этот момент и есть рабочий момент двигателя. Из-за потерь на трение ротор не может даже на холостом ходу достичь так называемой синхронной частоты вращения, т. е. точного значения частоты вращения поля статора. Вращающий момент образуется именно из-за разности частот вращения ротора и поля статора. Относительная разность частот вращения называется скольжением ротора (slip)

где ωs - частота вращения поля статора (синхронная частота), а ωm — частота вращеия ротора. Очевидно, что при s= 0 вращающий момент равен нулю.
Ротор синхронного двигателя движется синхронно с вращающимся магнитным полем, создаваемым обмотками статора (статор синхронного двигателя в принципе такой как у асинхронного). В отличие от асинхронного, обмотки ротора синхронного двигателя возбуждаются от внешнего источника постоянного тока. Полюса возникающего магнитного поля ротора занимают фиксированное положение относительно вращающегося поля статора и вращаются вместе с ним; следовательно, скорости вращения ноля статора и ротора идентичны и скольжение равно нулю. Синхронные двигатели часто используются в тех случаях, когда необходима постоянная скорость вращения при переменной нагрузке. В сочетании с современными преобразователями частоты синхронные двигатели могут работать с переменной скоростью вращения. Большое распространение приобретают синхронные двигатели с постоянными магнитами. Шаговые двигатели можно рассматривать как специальный тип синхронного двигателя.
Управляющие клапаны
Управляющий клапан (control valve) состоит из тела клиновидной или цилиндрической формы (иногда называется тарелкой), закрепленного на стержне (штоке), который движется вверх и вниз относительно цилиндрического седла. Стержень обычно перемещается под давлением сжатого воздуха на поршень или диафрагму с пружиной. Пружина может либо открывать, либо закрывать клапан в зависимости от того, какое положение требуется в случае прекращения подачи сжатого воздуха. Иногда для управления потоком используется электрический или гидравлический привод. Конструкции тела и седла клапана различаются в зависимости от требований к соотношению между производительностью и потерями напора на клапане, типа жидкости и расхода при разных положениях штока.
Размер клапана обычно выбирают в соответствии с параметрами трубопровода, в котором он устанавливается. Выбор формы клапана и сочетания размеров седла и тела (тарелки) требует оценки следующих факторов.
Потери напора (pressure drop). Большие потери напора на клапане могут затруднить движение штока. Специальная конструкция клапана заставляет поток двигаться в противоположных направлениях через два запирающих элемента, тем самым уравновешивая силы. Необходимость снижения потерь напора может потребовать применения различных типов клапанов, например типа "бабочка" (butterfly valve).
Максимальный расход (maximum flowrate). Это требование сводится к сочетанию максимального расчетного расхода с максимальной зоной управления. Последняя должна в идеале составлять 30-50 % от расчетного расхода. Иногда неопытные специалисты задают эту величину на уровне 10 %, что заметно ухудшает рабочие характеристики.
Управляемость (rangeability). Это отношение расходов при двух различных положениях штока. Оно в основном связано с конструкцией тела и седла и зависимости от потерь напора от расходных характеристик, которые, в свою очередь, связаны характеристиками нагнетающего насоса. Управляемость должна обеспечивать номинальный диапазон расходов с соответствующими зонами управления (желательно 30-50 %) по обе стороны диапазона.
Чувствительность (sensitivity) связана с управляемостью и величиной управляющего воздействия, необходимого для управления с заданной точностью. Иногда большой клапан обеспечивает номинальный расход, а малый, установленный параллельно, обеспечивает необходимую чувствительность.
Линейность (linearity). Желательно, чтобы в контуре управления существовала линейная зависимость между выходами регулятора и датчика, т. е. в цепочке «клапан - процесс - датчик". Если контур управления не обладает линейной зависимостью выходных и входных величин, ее можно обеспечить выбором характеристик клапана, а иногда и датчика. Качество управления при отсутствии линейности и может оказаться низким, или потребуется реализация специальных способов управления.
Гистерезис (hysteresis). Это обычная проблема управляющих клапанов, возникающая из-за процессов сухого трения (прилипания) в месте прилегания запорного элемента клапана к седлу, а также потерь напора на клапане. Как правило, гистерезис является причиной небольших постоянных колебаний в контуре управления, для борьбы с которыми можно применять устройства точного позиционирования клапана. Это специальное устройство управления с большим коэффициентом усиления, которое обеспечивает нужное положение штока клапана. В этом случае управляющий компьютер не осуществляет точного контроля за открытием клапана, а только вырабатывает опорные значения для устройства позиционирования клапана.
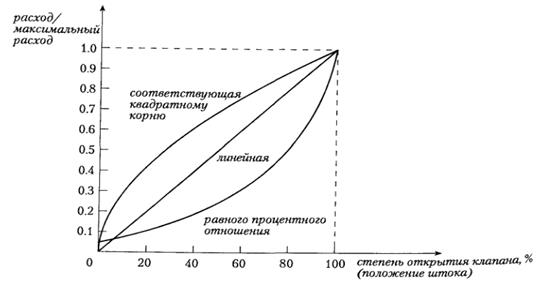
Рис. 9.2. Характеристики клапанов
Управляемость клапана можно определить на основании расчета двух расходов, равных, например, 15 и 85 % от максимального расхода. В этом случае необходим знать функцию f(х), которая характеризует клапан. Клапаны поставляются со следующими характеристиками:
f(х) = х - линейная,
f(х) = sqrt (x) - соответствующая квадратному корню,
f(x) - А↑(х-1) - равного процентного отношения (где конструктивная постоянная А обычно лежит в пределах от 20 до 50).
Эти зависимости показаны на рис. 9.2. Следует отметить, что идеальный клапан равного процентного отношения не закрывается полностью. На практике их проектируют таким образом, чтобы получить линейную характеристику при очень малых открытиях и следовательно, они закрываются полностью.
ОБЪЕКТЫ УПРАВЛЕНИЯ
Читайте также:
lektsia.com
Трехфазные асинхронные двигатели составляют основу современного электропривода. От ДПТ их отличает простота конструкции, надежность, высокие технико-экономические показатели. В настоящее время частотные преобразователи позволили сделать регулировочные свойства АД более лучшими, чем у ДПТ с НВ.
По конструкции ротора АД разделяются на двигатели и короткозамкнутым ротором (КЗР) и двигатели с фазным ротором (ФР). Наиболее простая конструкция у АД с КЗР. Ротор такого двигателя не имеет выводов, так как его обмотка выполнена в виде короткозамкнутой клетки (беличья клетка). Его обмотка выполнена в виде ряда медных или алюминиевых стержней, расположенных по периметру сердечника ротора, замкнутые в двух сторон короткозамыкающими кольцами. Простота конструкции обеспечивает им высокую надежность, простоту обслуживания и невысокую стоимость. Схема включения АД СС КЗР представлена на рис. 4.1, а.
Фазный ротор имеет трехфазную обмотку, выполненную по типу обмотки статора (рис. 4.1, б). Одни концы катушек соединены в нулевую точку («звезда»), а другие – подключены к контактным кольцам. На кольца наложены щетки, осуществляющие скользящий контакт с обмоткой ротора. При такой конструкции возможно подсоединение к обмотке ротора пускового или регулировочного реостата, позволяющего менять электрическое сопротивление в цепи ротора. Такие двигатели более сложны в изготовлении и эксплуатации, поэтому применяются только там, где применение АД с КЗР не обеспечит требованиям в приводу механизма.
Ротор АД отстаёт от вращающегося магнитного поля статора, которое создается обмоткой статора, то есть вращение происходит асинхронно. В этих условиях вращающееся поле статора индуцирует ЭДС в обмотке роторе, под действием которого в роторе протекает ток, который взаимодействует с вращающимся магнитным полем (ВМП), создавая вращающий момент двигателя. В рабочих режимах разница частот вращения статора и ротора не велика и составляет несколько процентов. При рассмотрение рабочих процессов АД обычно используют понятие скольжения 
 .
.
Скорость асинхронного двигателя в рабочих режимах
 ,
,
где синхронная частота вращения магнитного поля  ;
;  – частота питающего напряжения
– частота питающего напряжения  ;
;  – число пар полюсов.
– число пар полюсов.
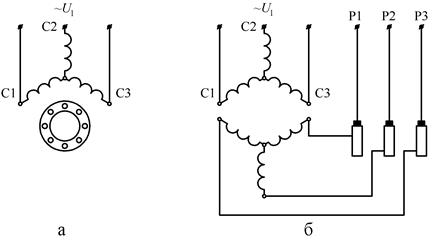 |
| Рис. 4.1. Схема включения асинхронных двигателей с КЗР (а) и ФР (б) |
Статор синхронного двигателя (СД) конструктивно не отличается от статора АД. Ротор СД имеет явнополюсную конструкцию, на полюсах которого расположена обмотка возбуждения. При включении обмотки к источнику постоянного тока в двигателе создается дополнительное магнитное поле. Таким образом, для работы синхронного двигателя кроме 3х-фазного переменного напряжения требуется также постоянное. Исключение составляют двигатели, возбуждаемые постоянными магнитами. Такие двигатели обладают абсолютно жесткой механической характеристикой: ротор двигателя вращается синхронно с вращающимся магнитным полем с частотой  .
.
 |
| Рис. 4.2. Схема включения СД |
В отличие от АД, синхронные не создают пускового момента, так как ротор двигателя по причине инерционности не может мгновенно разогнаться до синхронной скорости. Для пуска СД необходимо предварительно привести его во вращение до скорости, близкой к синхронной (  . С этой целью применяют асинхронный пуск, для чего на роторе двигателя располагается пусковая обмотка, конструктивно похожая на беличью клетку.
. С этой целью применяют асинхронный пуск, для чего на роторе двигателя располагается пусковая обмотка, конструктивно похожая на беличью клетку.
Процесс асинхронного пуска СД протекает следующим образом (рис. 4.2).
При включении обмотки статора СД в сеть СД запускается как асинхронный. При этом обмотку возбуждения замыкают на сопротивление для ограничения величины ЭДС, которая наводится в ОВ при пуске двигателя. При достижении скорости вращения близкой к номинальной, обмотку возбуждения подключают к постоянному напряжению, и двигатель втягивается в синхронизм, то есть скорость вращения двигателя становится равной синхронной скорости.
Синхронные двигатели изготавливаются на большие мощности: от сотен до тысяч киловатт. Объясняется это тем, что при меньших мощностях их применение нецелесообразно по технико-экономическим показателям.
СД обычно имеют целевое назначение, то есть каждая серия разработана для конкретных механизмов (для шаровых мельниц - СДМЗ, для привода компрессоров – СДК, для привода насосов – ВДС и др.).
Синхронные двигатели имеют перегрузочную способность  .
.
Еще одной особенностью СД является возможность работать с величиной  , более того, при перевозбуждении синхронный двигатель начинает генерировать емкостную нагрузку. Для повышении
, более того, при перевозбуждении синхронный двигатель начинает генерировать емкостную нагрузку. Для повышении  в сети используют синхронные компенсаторы, представляющие собой перевозбужденные СД специальной конструкции, работающие без нагрузки на валу.
в сети используют синхронные компенсаторы, представляющие собой перевозбужденные СД специальной конструкции, работающие без нагрузки на валу.
Механические характеристики синхронного двигателя представлены на рис. 4.3 (прямая 1).
Для синхронных двигателей важное значение имеет угловая характеристика, то есть зависимость момента синхронной машины от угла  . Угол - это угол между напряжением на статоре и ЭДС двигателя. При значениях, больших 90 градусов, как видно из рис. 4.4, двигатель выпадает из синхронизма, так как участок угловой характеристики при
. Угол - это угол между напряжением на статоре и ЭДС двигателя. При значениях, больших 90 градусов, как видно из рис. 4.4, двигатель выпадает из синхронизма, так как участок угловой характеристики при  является неустойчивым.
является неустойчивым.
 |  |
| Рис. 4.3. Механические характеристики асинхронного и синхронного двигателей | Рис. 4.4. Угловая характеристика СД |
poznayka.org
 Электродвигатели — машины, превращающие энергию электричества в механическую. Преобразованная энергия приводит во вращательное движение ротор двигателя, передающий вращение через трансмиссию непосредственно на вал исполнительного механизма. Основными типами электродвигателей являются синхронный и асинхронный двигатели. Различия между ними определяют возможности использования в различных устройствах и технологических процессах.
Электродвигатели — машины, превращающие энергию электричества в механическую. Преобразованная энергия приводит во вращательное движение ротор двигателя, передающий вращение через трансмиссию непосредственно на вал исполнительного механизма. Основными типами электродвигателей являются синхронный и асинхронный двигатели. Различия между ними определяют возможности использования в различных устройствах и технологических процессах.
Все электродвигатели имеют неподвижный статор и вращающийся ротор. Разница между асинхронным и синхронным двигателями состоит в принципах создания полюсов. В асинхронном электродвигателе они создаются явлением индукции. Во всех других электродвигателях используются постоянные магниты или катушки с током, создающие магнитное поле.
 Ведущие агрегаты синхронной машины — якорь и индуктор. Якорем является статор, а индуктор располагается на роторе. Под действием переменного тока в якоре образуется вращающееся магнитное поле. Оно сцепляется с магнитным полем индуктора, образованным полюсами постоянных магнитов или катушек с постоянным током. В результате этого взаимодействия энергия электричества преобразуется в кинетическую энергию вращения.
Ведущие агрегаты синхронной машины — якорь и индуктор. Якорем является статор, а индуктор располагается на роторе. Под действием переменного тока в якоре образуется вращающееся магнитное поле. Оно сцепляется с магнитным полем индуктора, образованным полюсами постоянных магнитов или катушек с постоянным током. В результате этого взаимодействия энергия электричества преобразуется в кинетическую энергию вращения.
Ротор синхронной машины имеет частоту вращения такую же, как у поля статора. Достоинства синхронных электродвигателей:
Синхронные машины широко используются как электродвигатели большой мощности для небольшой скорости вращения и постоянной нагрузки. Генераторы применяются там, где требуется автономный источник питания.
Имеются у синхронной машины и недостатки:
Современные синхронные агрегаты содержат в индукторе дополнительно к обмотке, питаемой постоянным током, ещё и пусковую короткозамкнутую обмотку, которая предназначена для пуска в асинхронном режиме.
 Вращающееся магнитное поле статора асинхронного двигателя наводит индукционные токи в роторе, которые образуют собственное магнитное поле. Взаимодействие полей приводит ротор во вращение. Частота вращения ротора при этом отстаёт от частоты вращения магнитного поля. Именно это свойство отражено в названии двигателя.
Вращающееся магнитное поле статора асинхронного двигателя наводит индукционные токи в роторе, которые образуют собственное магнитное поле. Взаимодействие полей приводит ротор во вращение. Частота вращения ротора при этом отстаёт от частоты вращения магнитного поля. Именно это свойство отражено в названии двигателя.
Асинхронные электродвигатели бывают двух типов: с короткозамкнутым и с фазным ротором.
Бытовые приборы, такие как вентилятор или пылесос, обычно снабжены двигателями с короткозамкнутым ротором, который представляет собой «беличье колесо». Все стержни замыкаются приваренными с обеих сторон дисками. Взаимодействие магнитного поля статора с наведёнными токами в роторе образовывает электромагнитную силу, которая действует на ротор в направлении вращения поля статора. Крутящий момент на валу электродвигателя создаётся всеми электромагнитными силами от каждого проводника.
В электродвигателе с фазным ротором применяется тот же статор, что и для мотора с короткозамкнутым ротором. А в ротор добавляются обмотки трёх фаз, соединённые в «звезду». К ним можно при пуске двигателя подключать реостаты, регулирующие пусковые токи. С помощью реостатов можно регулировать и частоту вращения двигателя.
Достоинствами асинхронных двигателей можно назвать:
Серьёзные недостатки — сложная регулировка частоты вращения и большие теплопотери. Для предотвращения перегрева корпус агрегата делается ребристым, и на вал электродвигателя устанавливается крыльчатка для охлаждения.
Конструктивные особенности и рабочие характеристики электродвигателей имеют решающее значение при выборе агрегатов. От этого зависит проектирование трансмиссий и всех силовых узлов механизмов. При выборе двигателя нужно опираться на общность и главные отличия в свойствах машин:
 Главное отличие синхронного от асинхронного двигателя заключается в конструкции ротора. Он представляет собой постоянный или электрический магнит. У асинхронника магнитные поля в роторе наводятся с помощью электромагнитной индукции.
Главное отличие синхронного от асинхронного двигателя заключается в конструкции ротора. Он представляет собой постоянный или электрический магнит. У асинхронника магнитные поля в роторе наводятся с помощью электромагнитной индукции.Синхронный и асинхронный электродвигатели находят каждый своё применение. Синхронные двигатели рекомендуется использовать везде при высоких мощностях, где присутствует непрерывный производственный процесс и не нужно часто перезапускать агрегаты или регулировать частоту вращения. Они используются в конвейерах, прокатных станах, компрессорах, камнедробилках и т. д. Современный синхронный электродвигатель имеет такой же быстрый запуск, как и асинхронный, но он меньше и экономичнее, чем асинхронный, равный по мощности.
Асинхронные электродвигатели с фазным ротором применяются там, где нужен большой пусковой момент и частые остановки агрегатов. Например, в лифтах и башенных кранах. Асинхронные электродвигатели с короткозамкнутым ротором получили широкое применение из-за простоты устройства и удобства в эксплуатации.
Используя достоинства разных агрегатов и то, чем отличается синхронный двигатель от асинхронного, можно делать обоснованный выбор того или иного мотора при проектировании машин, станков и другого оборудования.
220v.guru
Синхронные электродвигатели отличаются от асинхронных гораздо большей мощностью и полезной нагрузкой. Изменения тока возбуждения позволяет регулировать в них нагрузку. В отличие от асинхронных двигателей в синхронных при ударных нагрузках сохраняется постоянство частоты вращения, что позволяет их использовать в различных механизмах в металлургической и металлообрабатывающей промышленности.
Двигатели с синхронным типом действия способны развивать мощность до 20 тысяч кВт, что очень важно для приведения в действие исполнительных механизмов мощных обрабатывающих станков в машиностроении и других отраслях производства. Например, в высокопроизводительных гильотинных ножницах, где имеются большие ударные нагрузки на ротор электродвигателя.
Синхронные электрические двигатели с успехом используются в качестве источников реактивной мощности в узлах нагрузки для поддержания стабильного уровня напряжения. Довольно часто двигатели с синхронным принципом действия используются в качестве силовых машин в компрессорных установках большой производительности.
Мощные двигатели выполняются с использованием системы встречной вентиляции, при которой лопасти вентилятора расположены на роторе. Экономичный и надежный синхронный двигатель обеспечивает производительную и экономичную работу насосного оборудования.
Важной характеристикой синхронных электрических машин является сохранение постоянной скорости вращения, что важно для вращения приводов в виде насосов, компрессоров, вентиляторов, и различных генераторов переменного тока. Ценным также является возможность регулирования реактивного тока за счет вариаций тока возбуждения обмоток якоря. Благодаря этому увеличивается показатель косинуса φ при всех диапазонах работы, что увеличивает кпд двигателей и снижает потери в электрических сетях.
Сами двигатели с синхронным принципом действия устойчивы к колебаниям напряжения в сети, и обеспечивают постоянство скорости вращения при их возникновении. Синхронные электродвигатели при понижении питающего напряжения сохраняют большую перегрузочную способность, по сравнению с асинхронными. Способность к форсированию тока возбуждения при понижениях напряжения повышает надежность их работы при аварийных снижениях питающего напряжения в электрической сети.
Синхронные электрические машины рентабельны при мощностях свыше 100 кВт и основное применение находят для вращения мощных вентиляторов, компрессоров и других силовых установок. В качестве недостатков синхронных машин можно отметить их конструктивную сложность, наличие внешнего возбуждения обмоток ротора, сложность запуска и довольно высокие стоимостные характеристики.
Принцип действия синхронного электродвигателя основывается на взаимодействии вращения магнитного поля якоря с магнитными полями полюсов индуктора. Якорь обычно располагается на статоре, а индуктор на подвижном роторе. При больших мощностях полюсами служат электромагниты, при этом постоянный ток подается на ротор через скользящие кольцевые контакты.
В маломощных двигателях используются постоянные магниты, расположенные на роторе. Существуют также синхронные машины с обращенным принципом работы, когда якорь размещен на роторе, а индуктор на статоре. Однако такая конструкция применяется в двигателях старых конструкций.
Синхронные электрические машины могут работать в генераторном режиме, когда якорь расположен на статоре для удобства отбора генерируемого электричества. На этом принципе основаны мощные генераторы, работающие на гидроэлектростанциях.
| Следующая > |
www.tehnology-pro.ru