Большие пусковые токи двигателей создают скачки напряжения в электросети. Возможность избежать этого переключением асинхронного двигателя со звезды на треугольник я описывал. Есть еще способ снижения пускового тока — асинхронный двигатель с фазным ротором. Преимущества такого способа весьма ощутимы:
Из минусов я бы назвал громоздкость электрооборудования и повышенная сложность обслуживания. Схема асинхронного двигателя с фазным ротором значительно сложнее схемы асинхронного двигателя с короткозамкнутым ротором.Асинхронный двигатель с фазным ротором широко применяется в грузоподъемной технике (мостовые, козловые, башенные краны).Обмотки фазного ротора соединены в звезду, и через токосъемные кольца с графитовыми или медно-графитовыми щетками к обмоткам подключаются сопротивления номиналом ниже 1 Ом (десятые и сотые доли). Так как в фазном роторе наводится ток, превосходящий статорный, сопротивления очень большого сечения. Сделанные из нихрома, они собираются секциями в ящике, размером больше самого двигателя. Подключается от 3 до 5 ступеней разгона двигателя.При пуске работает вся батарея сопротивлений. Постепенно закорачивая части сопротивлений силовыми контактами пускателей, командоконтроллеров или контакторов, повышают скорость вращения ротора. В схемах асинхронного двигателя с фазным ротором я преднамеренно исключил многие элементы управления, чтобы не отвлекали от описания работы фазного ротора и сопротивлений. На легких мостовых кранах сопротивления переключаются непосредственно силовыми контактами командоконтроллера (Рис.1). Сначала включаются в работу все сопротивления, двигатель работает на малой скорости, затем закорачивается верхняя часть сопротивлений, и поэтапно выводится из работы вся батарея, обеспечивая максимальную скорость вращения ротора. Крановщик может включить самую высокую скорость, мгновенно проходя все ступени разгона.На башенном кране такая вольность чревата. Плавность разгона там регулирует реле времени .Помню, на башенном кране сгорела катушка реле, а начальство требует срочно разгрузить машины на стройке. Пришлось идти на преступление — закорачивать контакты реле времени. Жуткое зрелище, скажу вам, когда под тяжелым грузом дергало и раскачивало башню крана!
На легких мостовых кранах сопротивления переключаются непосредственно силовыми контактами командоконтроллера (Рис.1). Сначала включаются в работу все сопротивления, двигатель работает на малой скорости, затем закорачивается верхняя часть сопротивлений, и поэтапно выводится из работы вся батарея, обеспечивая максимальную скорость вращения ротора. Крановщик может включить самую высокую скорость, мгновенно проходя все ступени разгона.На башенном кране такая вольность чревата. Плавность разгона там регулирует реле времени .Помню, на башенном кране сгорела катушка реле, а начальство требует срочно разгрузить машины на стройке. Пришлось идти на преступление — закорачивать контакты реле времени. Жуткое зрелище, скажу вам, когда под тяжелым грузом дергало и раскачивало башню крана! Разберем примерную схему асинхронного двигателя с фазным ротором (Рис.2). Не обращая внимания на статорные цепи, вкратце разберем работу фазного ротора.В нейтральном положении контроллера включено реле времени РУ1, остальные катушки обесточены.На первой ступени пуска контактом контроллера включается контактор подъема или спуска (КМП или КМС), ротор вращается на минимальных оборотах при полном сопротивлении. Замыкается цепь реле РУ2. С задержкой времени включается нормально разомкнутый контакт РУ2, обеспечивая цепь включения контактора КУ1.На второй ступени пуска следующим контактом контроллера включается контактор КУ1, контакты которого выводят часть сопротивлений из работы. Скорость вращения увеличивается. В это время вспомогательный контакт включенного контактора КУ1 разрывает цепь реле времени РУ1. Нормально замкнутый контакт реле РУ1 возвращается с задержкой в исходное положение — цепь катушки КУ2 готова к работе.Третья ступень контроллера включает контактор КУ2, и выходит из работы еще одна часть сопротивлений. Вспомогательный контакт КУ2 отключает катушку реле времени РУ2, нормально разомкнутый контакт РУ2 без помощи контроллера с задержкой включает катушку контактора КУ3. Все сопротивления закорочены, двигатель работает на максимальных оборотах.Режим динамического торможения асинхронного двигателя основан на совместной работе фазного ротора, блока сопротивлений и трехфазного выпрямителя. Разберем саму суть динамического торможения с самовозбуждением. Если разбираться основательно во всех схемах режима, понадобится целая заумная статья, что для начинающего электрика будет сложновато.Торможение асинхронного двигателя с фазным ротором можно осуществить подачей на статор постоянного тока. Если постоянный ток получить через выпрямитель из питающей линии и подать на статор, получится динамическое торможение с подпиткой. Режим с самовозбуждением не использует внешнюю подпитку.Известно, что при снятии напряжения со статора в «железе» остается остаточное магнитное поле. Это явление и используется в нашей простенькой схеме (Рис.3).
Разберем примерную схему асинхронного двигателя с фазным ротором (Рис.2). Не обращая внимания на статорные цепи, вкратце разберем работу фазного ротора.В нейтральном положении контроллера включено реле времени РУ1, остальные катушки обесточены.На первой ступени пуска контактом контроллера включается контактор подъема или спуска (КМП или КМС), ротор вращается на минимальных оборотах при полном сопротивлении. Замыкается цепь реле РУ2. С задержкой времени включается нормально разомкнутый контакт РУ2, обеспечивая цепь включения контактора КУ1.На второй ступени пуска следующим контактом контроллера включается контактор КУ1, контакты которого выводят часть сопротивлений из работы. Скорость вращения увеличивается. В это время вспомогательный контакт включенного контактора КУ1 разрывает цепь реле времени РУ1. Нормально замкнутый контакт реле РУ1 возвращается с задержкой в исходное положение — цепь катушки КУ2 готова к работе.Третья ступень контроллера включает контактор КУ2, и выходит из работы еще одна часть сопротивлений. Вспомогательный контакт КУ2 отключает катушку реле времени РУ2, нормально разомкнутый контакт РУ2 без помощи контроллера с задержкой включает катушку контактора КУ3. Все сопротивления закорочены, двигатель работает на максимальных оборотах.Режим динамического торможения асинхронного двигателя основан на совместной работе фазного ротора, блока сопротивлений и трехфазного выпрямителя. Разберем саму суть динамического торможения с самовозбуждением. Если разбираться основательно во всех схемах режима, понадобится целая заумная статья, что для начинающего электрика будет сложновато.Торможение асинхронного двигателя с фазным ротором можно осуществить подачей на статор постоянного тока. Если постоянный ток получить через выпрямитель из питающей линии и подать на статор, получится динамическое торможение с подпиткой. Режим с самовозбуждением не использует внешнюю подпитку.Известно, что при снятии напряжения со статора в «железе» остается остаточное магнитное поле. Это явление и используется в нашей простенькой схеме (Рис.3). Ротор, вращаясь в остаточном магнитном поле, вырабатывает трехфазный переменный ток, который выпрямляется трехфазным диодным мостом. Полученное таким образом постоянное напряжение через контакты контактора КД подается на обмотки статора.Динамическое торможение эффективно применяется на башенных кранах в режиме опускания груза. Двигатель в этом режиме расторможен, и груз раскручивает лебедку. Ротор вырабатывает переменный ток, который, выпрямляясь диодным мостом, притормаживает двигатель. Если груз ускоряется, ток увеличивается, создавая большее торможение. Груз приостанавливается, ток уменьшается, торможение ослабевает. Получается что-то вроде отрицательной обратной связи (знаете электронику?). Плавность посадки груза самого высокого уровня. Единственное, что плохо, — груз должен быть не легким. Легкий груз может не разогнать лебедку.
Ротор, вращаясь в остаточном магнитном поле, вырабатывает трехфазный переменный ток, который выпрямляется трехфазным диодным мостом. Полученное таким образом постоянное напряжение через контакты контактора КД подается на обмотки статора.Динамическое торможение эффективно применяется на башенных кранах в режиме опускания груза. Двигатель в этом режиме расторможен, и груз раскручивает лебедку. Ротор вырабатывает переменный ток, который, выпрямляясь диодным мостом, притормаживает двигатель. Если груз ускоряется, ток увеличивается, создавая большее торможение. Груз приостанавливается, ток уменьшается, торможение ослабевает. Получается что-то вроде отрицательной обратной связи (знаете электронику?). Плавность посадки груза самого высокого уровня. Единственное, что плохо, — груз должен быть не легким. Легкий груз может не разогнать лебедку.
В настоящее время, на долю асинхронных двигателей приходится не менее 80% всех электродвигателей, выпускаемых промышленностью. К ним относятся и трехфазные асинхронные двигатели.
Трехфазные асинхронные электродвигатели широко используются в устройствах автоматики и телемеханики, бытовых и медицинских приборах, устройствах звукозаписи и т.п.
Достоинства асинхронных электродвигателей
Широкое распространение трехфазных асинхронных двигателей объясняется простотой их конструкции, надежностью в работе, хорошими эксплуатационными свойствами, невысокой стоимостью и простотой в обслуживании.
Устройство асинхронных электродвигателей с фазным ротором
 Основными частями любого асинхронного двигателя является неподвижная часть – статор и вращающая часть, называемая ротором.
Основными частями любого асинхронного двигателя является неподвижная часть – статор и вращающая часть, называемая ротором.
Статор трехфазного асинхронного двигателя состоит из шихтованного магнитопровода, запрессованного в литую станину. На внутренней поверхности магнитопровода имеются пазы для укладки проводников обмотки. Эти проводники являются сторонами многовитковых мягких катушек, образующих три фазы обмотки статора. Геометрические оси катушек сдвинуты в пространстве друг относительно друга на 120 градусов.
Фазы обмотки можно соединить по схеме »звезда» или «треугольник» в зависимости от напряжения сети. Например, если в паспорте двигателя указаны напряжения 220/380 В, то при напряжении сети 380 В фазы соединяют «звездой». Если же напряжение сети 220 В, то обмотки соединяют в «треугольник». В обоих случаях фазное напряжение двигателя равно 220 В.
Ротор трехфазного асинхронного двигателя представляет собой цилиндр, набранный из штампованных листов электротехнической стали и насаженный на вал. В зависимости от типа обмотки роторы трехфазных асинхронных двигателей делятся на короткозамкнутые и фазные.

В асинхронных электродвигателях большей мощности и специальных машинах малой мощности для улучшения пусковых и регулировочных свойств применяются фазные роторы. В этих случаях на роторе укладывается трехфазная обмотка с геометрическими осями фазных катушек (1), сдвинутыми в пространстве друг относительно друга на 120 градусов.
Фазы обмотки соединяются звездой и концы их присоединяются к трем контактным кольцам (3), насаженным на вал (2) и электрически изолированным как от вала, так и друг от друга. С помощью щеток (4), находящихся в скользящем контакте с кольцами (3), имеется возможность включать в цепи фазных обмоток регулировочные реостаты (5).

Асинхронный двигатель с фазным ротором имеет лучшие пусковые и регулировочные свойства, однако ему присущи большие масса, размеры и стоимость, чем асинхронному двигателю с короткозамкнутым ротором.
Принцип работы асинхронных электродвигателей
Принцип работы асинхронной машины основан на использовании вращающегося магнитного поля. При подключении к сети трехфазной обмотки статора создается вращающееся магнитное поле. угловая скорость которого определяется частотой сети f и числом пар полюсов обмотки p, т. е. ω1=2πf/p
Пересекая проводники обмотки статора и ротора, это поле индуктирует в обмотках ЭДС (согласно закону электромагнитной индукции). При замкнутой обмотке ротора ее ЭДС наводит в цепи ротора ток. В результате взаимодействия тока с результирующим малнитным полем создается электромагнитный момент. Если этот момент превышает момент сопротивления на валу двигателя, вал начинает вращаться и приводить в движение рабочий механизм. Обычно угловая скорость ротора ω2 не равна угловой скорости магнитного поля ω1, называемой синхронной. Отсюда и название двигателя асинхронный, т. е. несинхронный.
Работа асинхронной машины характеризуется скольжением s, которое представляет собой относительную разность угловых скоростей поля ω1 и ротора ω2: s=(ω1-ω2)/ω1

Значение и знак скольжения, зависящие от угловой скорости ротора относительно магнитного поля, определяют режим работы асинхронной машины. Так, в режиме идеального холостого хода ротор и магнитное поле вращаются с одинаковой частотой в одном направлении, скольжение s=0, ротор неподвижен относительно вращающегося магнитного пол, ЭДС в его обмотке не индуктируется, ток ротора и электромагнитный момент машины равны нулю. При пуске ротор в первый момент времени неподвижен: ω2=0, s=1. В общем случае скольжение в двигательном режиме изменяется от s=1 при пуске до s=0 в режиме идеального холостого хода.
При вращении ротора со скоростью ω2>ω1 в направлении вращения магнитного поля скольжение становится отрицательным. Машина переходит в генераторный режим и развивает тормозной момент. При вращении ротора в направлении, противоположном направлению вращения магнитного поли (s>1), асинхронная машина переходит в режим противовключения и также развивает тормозной момент. Таким образом, в зависимости от скольжения различают двигательный (s=1÷0), генераторный (s=0÷-∞) режимы и режим противовключення (s=1÷+∞). Режимы генераторный и противовключения используют для торможения асинхронных двигателей.
Принцип работы любого асинхронного двигателя основан на физическом взаимодействии магнитного поля, возникающего в статоре, с током, который это же поле наводит в обмотке ротора. Электрическое напряжение прикладывается к обмотке статора, которая выполнена как три группы катушек. Под действием напряжения в обмотке возникает переменный трехфазный ток, который и наводит вращающееся магнитное поле. При пересечении замкнутой обмотки ротора, это поле, в соответствии с законом об электромагнитной индукции, создает в ней ток. Взаимодействие вращающегося магнитного поля (статор) и тока (ротор) создает вращающий электромагнитный момент, который и приводит ротор в движение. Благодаря совокупности моментов, создаваемых отдельными проводниками, возникает результирующий момент, электромагнитная пара сил, заставляющая вращаться ротор в направлении, в котором движется электромагнитное поле в статоре. Ротор и магнитное поле при этом вращаются с различными скоростями, т.е. асинхронно (отсюда и основное название двигателей). У асинхронных двигателей скорость, с которой будет вращаться ротор, всегда будет меньше скорости, с которой вращается магнитное поле в статоре.
С момента начала вращения ротор может выполнить механическую работу – с помощью подсоединенного вала приводить в движение технологическую машину (насос, вентилятор, транспортер и т.д.).
Принцип работы асинхронного двигателя показан на видео.
Асинхронный двигатель с фазным ротором необходим в приводах, которые сразу требуют большого пускового момента – лифты, краны, мельницы и т.д. В таких механизмах необходимее уже при запуске двигателя получить максимальный момент, но при этом ограничив значение пускового тока.
Основные элементы асинхронного двигателя – ротор и статор, разделяемые воздушным зазором. Активные части двигателя – магнитопровод и обмотки, остальные составляющие – конструктивные, призванные обеспечить необходимую жесткость, прочность, возможность вращения и его стабильность, охлаждение и т.д.
Cтатор – неподвижная часть, на внутренней стороне сердечника которого размещаются обмотки. Обмотка статора — это трехфазная (для общего случая — многофазная) обмотка, в которой проводники равномерно распределяются по окружности статора и уложены пофазно в пазах, соблюдая угловое расстояние равное 120 эл.град. Статорные фазы обмотки соединены стандартно – «звезда» или «треугольник» — и подключены к трехфазной сети электротока. В процессе вращения (изменения) магнитного потока в обмотках возбуждения, происходит перемагничивание магнитопровода статора, поэтому он изготовлен шихтованным (набирается из пластин) из особой электротехнической стали – таким способом удается минимизировать магнитные потери.

Рис. 1. Схема асинхронного двигателя
На асинхронный двигатель с фазным ротором установлен ротор, на котором размещают три, как и на статоре, фазные обмотки, соединяемые между собой по схеме «звезда» («треугольник» встречается очень редко). К медным кольцам (их количество равно количеству обмоток), которые закреплены на валу рота и полностью изолированы как сердечника ротора, так и между собой, присоединены концы фазных обмоток. Благодаря этому соединению асинхронный двигатель с фазным ротором имеет и другое название – двигатель с контактными кольцами.
Асинхронные двигатели сегодня – это доля в 80% от всего количества разнообразных электродвигателей, выпускаемых мировой промышленностью. Все это – благодаря простоте конструкции, в эксплуатации и обслуживании, низкой себестоимости и высокой надежности. Но есть один существенный недостаток – из сети асинхронные двигатели потребляют реактивную составляющую мощности. Поэтому их предельная мощность напрямую зависит от мощности системы энергоснабжения. Кроме того, такой электропривод имеет значения пускового тока, которые в втрое больше рабочих. При малой мощности системы энергоснабжения, это может вызвать значительное падение напряжение в сети и отключение других приборов. Асинхронные двигатели с фазным ротором, благодаря введению в цепь ротора пусковых реостатов, могут запускаться с небольшим пусковым током.

Рис. 2. Асинхронные двигатели
Резисторы, стоящие в цепи ротора, помогают ограничить ток не только в течении запуска, но так же и при торможении, реверсе и при снижении скорости. По мере того, как двигатель набирает скорость – разгоняется, чтобы поддерживать необходимое ускорение, резисторы выводятся. При окончании разгона и выхода на паспортную частоту, все резисторы шунтируются, двигатель переходит на работу со своей естественной механической характеристикой.
Рассмотрим пример запуска асинхронного двигателя с фазным ротором.

Рис. 3. Схема запуска асинхронного двигателя с фазным ротором
Используя схему асинхронного двигателя (рис. ) рассмотрим запуск в две ступени который проводится с использованием релейно-контакторной аппаратуры. Одновременно напряжение подается как на силовые цепи, так и на управляющие – замыкается выключатель QF.
При подаче напряжения реле времени (обозначены КТ1 и КТ2) в цепи управления срабатывают, размыкая свои контакты. После нажатия кнопки запуска (SB1) срабатывает контактор КМ3 и запускается двигатель с резисторами, которые введены в цепь ротора – в этот момент на контакторах КМ1 и КМ2 питания нет. При подключении контактора КМЗ, из-за потери питания, в цепи контактора КМ1 реле КТ1 замыкает контакт через интервал времени, заданный задержкой времени в реле КТ1. По истечению времени (двигатель разгоняется, ток ротора начинает падать) происходит включение контактора КМ1 – происходит шунтирование первой пусковой ступени резисторов. Ток снова возрастает. но по мере разгона его значение начинает уменьшаться. Одновременно с этим в цепи происходит размыкание реле КТ2, оно теряет питание и с выставленной выдержкой происходит замыкание контакта в цепи контактора КМ2. Происходит шунтирование второй ступени резисторов, включенных в цепь ротора. Двигатель работает в штатном режиме.
Благодаря ограничению пускового тока, асинхронный двигатель с фазовым ротором можно устанавливать в слабых сетях.
Порядок подключения асинхронного двигателя приведен на видео.
Как уже указывалось выше, если сравнивать его с двигателем с короткозамкнутым ротором, имеет два основных преимущества:
Кроме того, следует отметить и другие достоинства:
Отметим и недостатки:
На практике асинхронные двигатели с фазным ротором оптимально подходят для случаев, когда нет необходимости в широкой и плавной регулировке скорости и требуется очень большая (особенно на первоначальном этапе) мощность двигателя.
Для правильного подключения асинхронного двигателя важно правильно определить начала и концы фазных обмоток. Как это сделать – подробно рассмотрено на видео.
Источники: http://electriku.ru/rotor, http://electricalschool.info/main/osnovy/259-asinkhronnye-jelektrodvigateli-s-faznym.html, http://44kw.com/blogs/school/2296-video-asinkhronnyi-dvigatel-printsip-raboty-kharakteristiki
electricremont.ru
Асинхронный двигатель с фазным ротором – это двигатель, который можно регулировать с помощью добавления в цепь ротора добавочных сопротивлений. Обычно такие двигатели применяются при пуске с нагрузкой на валу, так как увеличение сопротивления в цепи ротора, позволяет повысить пусковой момент и уменьшить пусковые токи.
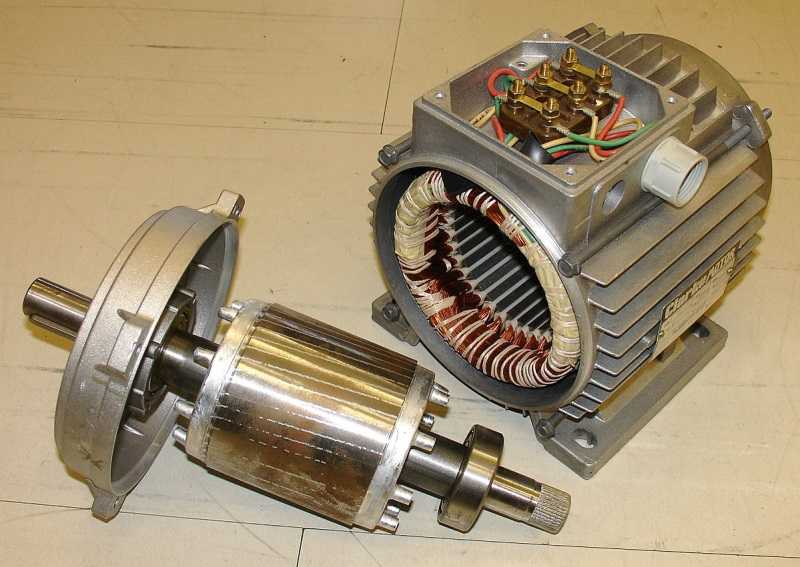
Другая разновидность трехфазных асинхронных двигателей - двигатели с фазным ротором - конструктивно отличается от рассмотренного двигателя главным образом устройством ротора (рис.5). Статор этого двигателя также состоит из корпуса 3 и сердечника 4 с трехфазной обмоткой. У него имеются подшипниковые щиты 2 и 6 с подшипниками качения 1 и 7. К корпусу 3 прикреплены лапы 10 и коробка выводов 9. Однако ротор имеет более сложную конструкцию. На валу 8 закреплен шихтованный сердечник 5с трехфазной обмоткой, выполненной аналогично обмотке статора. Эту обмотку соединяют звездой, а ее концы присоединяют к трем контактным кольцам 11, расположенным на валу и изолированным друг от друга и от вала. Для осуществления электрического контакта с обмоткой вращающегося ротора на каждое контактное кольцо 1 (рис.6) накладывают обычно две щетки 2, располагаемые в щеткодержателях 3. Каждый щеткодержатель снабжен пружинами, обеспечивающими прижатие щеток к контактному кольцу с определенным усилием.
Асинхронные двигатели с фазным ротором имеют более сложную конструкцию и менее надежны, но они обладают лучшими регулировочными и пусковыми свойствами, чем двигатели с короткозамкнутым ротором. Принципиальная схема включения в трехфазную сеть асинхронного двигателя с фазным ротором показана на рис.4, б. Обмотка ротора этого двигателя соединена с пусковым реостатомПР, создающим в цепи ротора добавочное сопротивление Rдоб.
Рис.5. Устройство трехфазного асинхронного двигателя с фазным ротором:
1, 7 - подшипники; 2, 6 – подшипниковые щиты; 3 - корпус; 4 – сердечник статора с обмоткой; 5 – сердечник ротора; 8 - вал; 9 – коробка выводов; 10 - лапы; 11 – контактные кольца

Рис.6 Расположение щеткодержателей
Конструктивно фазный ротор представляет из себя трехфазную обмотку (аналогичную обмотки статора) уложенную в пазы сердечника фазного ротора. Концы фаз такой обмотки ротора обычно соединяются в "звезду", а начала подключают к контактным кольцам, изолированным друг от друга и от вала. Через щетки к контактным кольцам обычно присоединяется трехфазный пусковой или регулировочный реостат. Асинхронные двигатели с фазным ротором имеют более сложную конструкцию, чем у двигателей с короткозамкнутым ротором, однако обладают лучшими пусковыми и регулировочными свойствами.
3) Начертить графики механических характеристик при пуске АД при наличии в цепи ротора пускового реостата rд=var. Пояснить пуск АД в данном случае.

Наличие контактных колец у двигателей с фазным ротором позволяет подключить к обмотке ротора пусковой реостат (ПР). При этом активное сопротивление цепи ротора увеличивается до значения R2 = r2' + rд', где rд' — электрическое сопротивление пускового реостата,
Рис. 15.1. Зависимость пускового момента от
активного сопротивления цепи ротора приведенное к обмотке статора.
Влияние возросшего значения активного сопротивления на пусковой момент двигателя Мп следует из 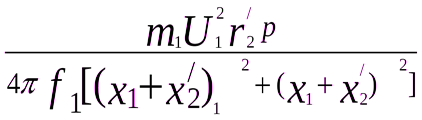 . Это влияние графически показано на рис. 15.1, из которого видно, что если при отсутствии ПР, т. е. при активном сопротивлении цепи ротора R2 = r2, пусковой момент Мп = Мпо, то при введении в цепь ротора добавочного активного сопротивления rдоб , когда R/2 = r2' + rдоб' , пусковой момент возрастает и при R//2 = r2' + rдоб' = х1 + х'2 достигает наибольшего значения Мп.наиб. При R/2 > х1 + х'2 пусковой момент уменьшается.
. Это влияние графически показано на рис. 15.1, из которого видно, что если при отсутствии ПР, т. е. при активном сопротивлении цепи ротора R2 = r2, пусковой момент Мп = Мпо, то при введении в цепь ротора добавочного активного сопротивления rдоб , когда R/2 = r2' + rдоб' , пусковой момент возрастает и при R//2 = r2' + rдоб' = х1 + х'2 достигает наибольшего значения Мп.наиб. При R/2 > х1 + х'2 пусковой момент уменьшается.
Введение добавочного активного сопротивления увеличивает полное сопротивление роторной цепи, в результате чего уменьшается пусковой ток и увеличивается роторной цепи, вследствие чего увеличивается активная составляющая тока ротора и, следовательно, пусковой момент двигателя.
На рис. 15.2, а показана схема включения ПР в цепь фазного ротора. В процессе пуска двигателя ступени ПР переключают таким образом, чтобы ток ротора оставался приблизительно неизменным, а среднее значение пускового момента было близко к наибольшему. На рис. 15.2, б представлен график изменения пускового момента асинхронного двигателя при четырех ступенях пускового реостата. Так, в начальный момент пуска (первая ступень реостата) пусковой момент равен Мп.maх. По мере разгона двигателя его момент уменьшается по кривой 1. Как только значение момента уменьшится до значения Мп.min рычаг реостата переводят на вторую ступень и сопротивление реостата

Рис. 15.2. Схема включения пускового реостата (а) и построение графика пускового момента (б) асинхронного двигателя с фазным ротором
уменьшается. Теперь зависимость М = f(s) выражается кривой 2 и пусковой момент двигателя вновь достигает Мп.mах. Затем ПР переключают на третью и на четвертую ступени (кривые 3 и 4).После того как электромагнитный момент двигателя уменьшится до значения, равного значению противодействующего момента на валу двигателя, частота вращения ротора достигнет установившегося значения и процесс пуска двигателя будет закончен. Таким образом, в течение всего процесса пуска значение пускового момента остается приблизительно постоянным, равным Мп.ср. Следует иметь в виду, что при слишком быстром переключении ступеней реостата пусковой ток может достигнуть недопустимо больших значений.
Рис. 262. Механические характеристики асинхронного двигателя: а — естественная; б — при включении пускового реостата
При включении в цепь обмоток ротора пускового реостата получаем семейство механических характеристик (рис. 262,б). Характеристика 1 при работе двигателя без пускового реостата называется естественной. Характеристики 2, 3 и 4, получаемые при подключении к обмотке ротора двигателя реостата с сопротивлениями R1п (кривая 2), R2п (кривая 3) и R3п (кривая 4), называют реостатными механическими характеристиками. При включении пускового реостата механическая характеристика становится более мягкой (более крутопадающей), так как увеличивается активное сопротивление цепи ротора R2 и возрастает sкp. При этом уменьшается пусковой ток. Пусковой момент Мп также зависит от R2. Можно так подобрать сопротивление реостата, чтобы пусковой момент Мп был равен наибольшему Мmax.
studfiles.net
Недостатком асинхронного двигателя с короткозамкнутым ротором является большой пусковой ток, который превышает номинальный ток в 5-7 раз.
Желая улучшить пусковые характеристики асинхронного двигателя, М. О. Доливо-Добровольский разработал двигатель с фазным ротором.
Асинхронный двигатель с фазным ротором имеет обычный для асинхронных двигателей статор с трехфазной сетевой обмоткой, но на поверхности ротора также находится трехфазная обмотка. Три фазные обмотки ротора соединяются на самом роторе звездой, а свободные их концы соединяются с тремя изолированными друг от друга контактными кольцами, укрепленными на валу машины и изолированными от него (рис. 8.6). Поэтому асинхронный двигатель с фазным ротором называют также асинхронным двигателем с контактными кольцами.
Контактные кольца соприкасаются со щетками, установленными в неподвижных щеткодержателях. Через кольца и щетки обмотка ротора замыкается на пусковой трехфазный реостат, который изменяет активное сопротивление обмотки ротора в момент пуска. Обмотка статора такого двигателя включается непосредственно в трехфазную сеть (рис. 8.7).

Эта система используется либо для пуска (для уменьшения пускового тока при одновременном сохранении вращающего момента), либо для регулирования скорости вращения ротора двигателя. После разгона ротора пусковой реостат выключается, и обмотка закорачивается с помощью специального центробежного автоматического замыкателя. Для уменьшения потерь на трение в некоторых двигателях с фазным ротором имеются приспособления для отвода щеток от контактных колец после их замыкания.
Одним из важнейших достоинств асинхронного двигателя с фазным ротором является то, что в момент пуска создается большой вращающий момент при значительно меньших, чем у короткозамкнутых двигателей, пусковых токах. Объясняется это тем, что асинхронный двигатель при пуске развивает максимальный вращающий момент тогда, когда активное сопротивление ротора будет равно индуктивному сопротивлению двигателя. А так как у двигателей с фазным ротором активное сопротивление ротора можно изменять с помощью пускового реостата, то и пусковые характеристики их значительно лучше, чем у двигателей с короткозамкнутым ротором.
Пуск асинхронного двигателя с фазным ротором производится следующим образом. Пусковой реостат устанавливается на холостую клемму (цепь ротора разомкнута), а на статор подается сетевое напряжение. Затем включается пусковой реостат, и его сопротивление постепенно уменьшают и делают равным нулю, когда двигатель приобретет номинальную скорость. Пусковой ток двигателя с фазным ротором превышает номинальный всего в 1,5-2 раза. Кроме того, включение в цепь ротора пускового реостата значительно увеличивает вращающий момент.
Сущность процесса регулирования скорости асинхронного двигателя с фазным ротором при помощи регулировочного реостата сводится к следующему. Ротор двигателя обладает определенной инерцией, и поэтому сразу после введения
реостата его скорость и индуцируемая в роторе ЭДС Е2 в
начальный момент остаются неизменными. Увеличение сопротивления пускового реостата в цепи ротора вызывает
уменьшение тока ротора 12, что приводит к уменьшению вращающего момента (см. формулу (8.3)). Вследствие этого скорость вращения ротора п2 начнет уменьшаться. Уменыпение скорости п2 аналогично увеличению скольжениям, вследствие чего индуцируемая в роторе ЭДС Е2, пропорциональная s, также начнет расти, вызывая увеличение тока ротора I2. Рост тока I2 и уменьшение скорости вращения ротора п2
будет продолжаться до тех пор, пока ток I2 не достигнет своего прежнего значения. В этом случае вращающий момент снова станет равным статическому, и двигатель начнет вращаться с постоянной скоростью, величина которой будет уже несколько меньше, чем до введения реостата. Регулировка скорости асинхронного двигателя с фазным ротором может осуществляться только в сторону уменьшения оборотов.
studfiles.net
 Одной из разновидностей асинхронного двигателя является двигатель с фазным ротором. На практике данный двигатель довольно часто применяется, благодаря улучшенным пусковым свойствам и характеристикам.
Одной из разновидностей асинхронного двигателя является двигатель с фазным ротором. На практике данный двигатель довольно часто применяется, благодаря улучшенным пусковым свойствам и характеристикам.
Устройство асинхронного двигателя с фазным ротором
Как и у АД с короткозамкнутым ротором, сердечник его статора набирается из листов электротехнической стали, а затем спрессовывается. В пазы сердечника укладываются фазные обмотки, концы которых затем выводятся в коробку, расположенную на корпусе двигателя.
Отличие заключается в роторе двигателя. Он также как и статор набирается из листов стали, спрессовывается и в него набирается фазная обмотка. Причем число фаз ротора равно числу фаз статора, в то время как у короткозамкнутого, каждый стержень “беличьей клетки” образует отдельную фазу. Отсюда название – фазный ротор.
Концы фаз фазного ротора соединяются с контактными кольцами, которые расположены на валу ротора. В свою очередь, контактные кольца соприкасаются с графитовыми щетками, которые имеют выводы в коробку на корпусе, для возможности подключения дополнительного сопротивления. Это сопротивление в цепи ротора оказывает влияние на токи, протекающие в нем, а как следствие на его характеристики. При увеличении сопротивления цепи ротора, механическая характеристика становится более мягкой.
Влияние сопротивления сказывается и на пуске двигателя, а именно добавочное сопротивление позволяет осуществить более мягкий пуск, снизить пусковые токи и моменты и как следствие, снизить удары в механической части привода в момент пуска.
Как правило, используют переменное сопротивление, которое уменьшают с увеличением оборотов двигателя. Так как зачастую оно представляет из себя ступенчатый реостат, то и пуск двигателя осуществляется тоже ступенчато.
Для увеличения КПД двигателя и сохранения целостности щеток в конструкции двигателя предусматривается специальное щеткоснимательное устройство, которое убирает щетки после пуска. КПД повышается за счет того что, на щетках падает часть напряжения.
Таким образом, преимуществом асинхронного двигателя с фазным ротором является возможность пуска под нагрузкой, но недостатком является более сложная конструкция, а также его дороговизна по сравнению с двигателем с короткозамкнутым ротором. Короткозамкнытый кроме того, является более простым и надежным, не требует дополнительных устройств.
| Следующая >Устроиство и принцип действия синхронного электродвигателя |
xn----8sbnaarbiedfksmiphlmncm1d9b0i.xn--p1ai
Асинхронный двигатель с фазным ротором (рис. 258 и 259) применяют для привода таких машин и механизмов, которые пускаются в ход под нагрузкой (краны, лифты и пр.). В подобных приводах двигатель должен развивать при пуске максимальный момент, что достигается с помощью пускового реостата (см. § 80).
В двигателе с фазным ротором статор выполнен так же, как и в двигателе с короткозамкнутым ротором. На роторе же расположена трехфазная обмотка, состоящая из трех, шести, девяти и т. д. катушек (в зависимости от числа полюсов машины), сдвинутых одна относительно другой на 120° (в двухполюсной машине), 60° (в четырехполюсной) и т. д. Числа полюсов обмоток статора и ротора берутся одинаковыми.
 Рис. 258. Электрическая схема асинхронного двигателя с фазным ротором (а) и его условное графическое изображение (б): 1 — статор; 2 — ротор; 3 — контактные кольца со щетками; 4 — пусковой реостат
Рис. 258. Электрическая схема асинхронного двигателя с фазным ротором (а) и его условное графическое изображение (б): 1 — статор; 2 — ротор; 3 — контактные кольца со щетками; 4 — пусковой реостат

 Рис. 259. Основные конструктивные узлы асинхронного двигателя с фазным ротором: 1 — приспособление для подъема щеток; 2, 12 —- подшипниковые щиты; 3 — щеткодержатели; 4 — траверса; 5 — обмотка статора; 6 — остов; 7 — сердечник статора; 8 — коробка с выводами; 9 — сердечник ротора; 10 — обмотка ротора; 11 — контактные кольца
Рис. 259. Основные конструктивные узлы асинхронного двигателя с фазным ротором: 1 — приспособление для подъема щеток; 2, 12 —- подшипниковые щиты; 3 — щеткодержатели; 4 — траверса; 5 — обмотка статора; 6 — остов; 7 — сердечник статора; 8 — коробка с выводами; 9 — сердечник ротора; 10 — обмотка ротора; 11 — контактные кольца
Обмотку фазного ротора обычно соединяют «звездой». Концы ее присоединяют к трем контактным кольцам, к которым посредством щеток подключают трехфазный пусковой реостат, т. е. в каждую фазу ротора в момент пуска вводят дополнительное активное сопротивление.
Для уменьшения износа контактных колец и щеток двигатели с фазным ротором иногда снабжают приспособлениями 1 (см. рис. 259) для подъема щеток и замыкания колец накоротко после выключения реостата.
electrono.ru