Во многих случаях трехфазные асинхронные двигатели применяются для приводов, не требующих регулирования частоты вращения. Но асинхронные двигатели обладают ценными преимуществами: надежностью, дешевизной, простотой конструкции, высоким КПД и относительно малой массой. По этим причинам естественно стремление применять их и для приводов с регулируемой частотой вращения.
Для регулирования частоты вращения асинхронных двигателей с короткозамкнутым ротором обычно используются метод частотного регулирования, представляющий собой плавное регулирование частоты вращения магнитного поля путем регулирования частоты тока в обмотках статора, и метод изменения числа пар полюсов вращающегося магнитного поля, при котором частота вращения магнитного поля изменяется скачком.
Для регулирования частоты вращения асинхронных двигателей с фазным ротором используется метод реостатного регулирования, представляющий собой плавное регулирование скольжения ротора путем изменения активного сопротивления его фазных обмоток.
Частотное регулирование.Наиболее перспективным методом управления частотой вращения асинхронного двигателя являетсярегулирование частоты переменного тока статора двигателя. Угловая скорость вращающегося поля . Следовательно, при изменении частоты токаf пропорционально изменяется угловая скорость поля. Однако при осуществлении регулирования частоты тока нужно учесть, что необходимо одновременное регулирование напряжения. ЭДС фазы, а следовательно, и питающее напряжение пропорциональны частоте тока и потоку. Так как поток должен сохраняться во всех режимах одним и тем же, то напряжение должно быть (без. учета падений напряжения в машине) пропорциональным частоте. Кроме того, это нужно для того, чтобы при изменении частоты вращения двигателя не изменялся его вращающий момент.
. Следовательно, при изменении частоты токаf пропорционально изменяется угловая скорость поля. Однако при осуществлении регулирования частоты тока нужно учесть, что необходимо одновременное регулирование напряжения. ЭДС фазы, а следовательно, и питающее напряжение пропорциональны частоте тока и потоку. Так как поток должен сохраняться во всех режимах одним и тем же, то напряжение должно быть (без. учета падений напряжения в машине) пропорциональным частоте. Кроме того, это нужно для того, чтобы при изменении частоты вращения двигателя не изменялся его вращающий момент.
Чтобы оценить характер зависимости вращающего момента от частоты тока в обмотках статора и от напряжения на нем, пренебрежем в уравнении  активным сопротивлением обмотки статора
активным сопротивлением обмотки статора и индуктивными сопротивлениями рассеяния обмоток статора
и индуктивными сопротивлениями рассеяния обмоток статора и ротора
и ротора и воспользуемся выражением для частоты скольжения (
и воспользуемся выражением для частоты скольжения ( ):
):
где А =const.
Следовательно, при изменении частоты тока для поддержания вращающего момента постоянным необходимо пропорционально изменять напряжение на статоре; иными словами, условием поддержания постоянства вращающего момента двигателя при регулировании частоты будет  . Если регулировать частоту тока и напряжение, соблюдая указанное условие, то механические характеристики двигателя будут оставаться жесткими, а максимальный момент почти независимым от частоты (он существенно уменьшается лишь при относительно низких частотах). В то же время мощность будет изменяться пропорционально частоте тока, так как
. Если регулировать частоту тока и напряжение, соблюдая указанное условие, то механические характеристики двигателя будут оставаться жесткими, а максимальный момент почти независимым от частоты (он существенно уменьшается лишь при относительно низких частотах). В то же время мощность будет изменяться пропорционально частоте тока, так как . Например, при уменьшении частоты тока в 2 раза вдвое уменьшается и мощность двигателя на валу.
. Например, при уменьшении частоты тока в 2 раза вдвое уменьшается и мощность двигателя на валу.
Регулирование изменением числа пар полюсов. Ступенчатое изменение угловой скорости асинхронного двигателя в широких пределах осуществимо ценой усложнения и удорожания конструкции асинхронного двигателя — это регулирование переключением числа пар полюсов двигателя.
При постоянной частоте сети угловая скорость вращающегося поля зависит только от числа пар полюсов этого поля, определяемого обмоткой статора. Если на статоре поместить две отдельные обмотки — одну, образующую р пар, а другую, образующуюр' пар полюсов, то, включив в сеть первую или вторую обмотку, мы получим частоту вращения поля: или
или
следовательно,  , соответственным образом будут различаться и частоты вращения ротора двигателя. При этом обмотка ротора двигателя должна быть выполнена, как беличье колесо.
, соответственным образом будут различаться и частоты вращения ротора двигателя. При этом обмотка ротора двигателя должна быть выполнена, как беличье колесо.
Числа полюсов обмоток статора в этом случае взаимно ничем не связаны и могут быть выбраны любыми в зависимости от условий работы двигателя. Само регулирование сводится к скачкообразному изменению частоты вращения поля двигателя. Но частота вращения ротора не может изменяться скачкообразно из-за инерции всей системы электропривода. Лишь после переключения начинается соответствующее изменение частоты вращения ротора.
Ч тобы показать нагляднее этот переходный процесс, построим две механические характеристики асинхронной машины с изменяемым числом пар полюсов: одну характеристику, соответствующуюр парам полюсов, а вторуюр' =2р парам полюсов (соответственно рис. 14.31,а и б). Предположим, что момент на валу двигателя остается постоянным при изменении частоты вращения поля. При увеличении последней, т. е. при переходе отр' кр парами полюсов, двигатель сначала оказывается в условиях, близких к пусковым, и имеет место скачок тока.
тобы показать нагляднее этот переходный процесс, построим две механические характеристики асинхронной машины с изменяемым числом пар полюсов: одну характеристику, соответствующуюр парам полюсов, а вторуюр' =2р парам полюсов (соответственно рис. 14.31,а и б). Предположим, что момент на валу двигателя остается постоянным при изменении частоты вращения поля. При увеличении последней, т. е. при переходе отр' кр парами полюсов, двигатель сначала оказывается в условиях, близких к пусковым, и имеет место скачок тока.
Но при переходе от р кр', т. е. при уменьшении частоты вращения поля, машина оказывается сначала в условиях генераторного режима и работает, отдавая
энергию в сеть. Такой режим иногда используется для быстрого и экономичного торможения электропривода.
Двумя отдельными обмотками снабжаются статоры лишь у двигателей небольшой мощности; у двигателей большой мощности более целесообразным является переключение катушек одной и той же обмотки для получения различного числа пар полюсов.
Н а рис. 14.32 показана схема переключения трехфазной обмотки с двух на четыре полюса. Переключение обмотки в ином отношении, чем 1 : 2, требует более сложного изменения схемы и применяется реже.
а рис. 14.32 показана схема переключения трехфазной обмотки с двух на четыре полюса. Переключение обмотки в ином отношении, чем 1 : 2, требует более сложного изменения схемы и применяется реже.
В большинстве случаев статор асинхронной машины снабжается двумя независимыми обмотками, из которых каждая переключается в отношении 1 : 2 или ином. Таким образом, двигатель имеет четыре ступени частоты вращения, например 3000; 1500, 1000 и 500 об/мин.
Реостатное регулирование. В трехфазных асинхронных двигателях с фазным ротором используется реостатный способ регулирования частоты вращения ротора. Это достигается введением в цепь фазных обмоток ротора регулируемого трехфазного реостата, как при пуске двигателя (рис. 14.24). Но этот реостат должен быть рассчитан на длительную нагрузку током ротора, а не на кратковременную, как пусковой реостат. Увеличение активного сопротивления цепи ротора изменяет характеристикуМ (s) — делает ее более мягкой (см. рис. 14.25). Если при постоянном моменте на валу двигателя увеличивать активное сопротивление цепи ротора путем постепенного увеличения сопротивления реостата( ), то рабочая точка будет смещаться с одной кривойМ (s) на следующую, соответствующую возросшему сопротивлению цепи ротора (рис. 14.25, точки1—4), соответственно чему будет расти скольжение, а следовательно, уменьшаться частота вращения двигателя. Этим путем возможно изменять частоту вращения ротора в пределах от номинальной до полной остановки. Но при таком способе регулирования неизбежны относительно большие потери энергии. Мощность вращающегося поля РВРП без учета потерь энергии в сердечнике статора состоит из мощности потерь в проводниках обмотки ротора :
), то рабочая точка будет смещаться с одной кривойМ (s) на следующую, соответствующую возросшему сопротивлению цепи ротора (рис. 14.25, точки1—4), соответственно чему будет расти скольжение, а следовательно, уменьшаться частота вращения двигателя. Этим путем возможно изменять частоту вращения ротора в пределах от номинальной до полной остановки. Но при таком способе регулирования неизбежны относительно большие потери энергии. Мощность вращающегося поля РВРП без учета потерь энергии в сердечнике статора состоит из мощности потерь в проводниках обмотки ротора : и механической мощности
и механической мощности
Отношение  показывает, что доля механической мощности уменьшается прямо пропорционально уменьшению частоты вращения ротора, в то же время соответственно увеличивается доля мощности потерь в активном сопротивлении цепи ротора. Следовательно, для уменьшения частоты вращения двигателя, например, на 25% нужно включить в цепь ротора реостат с таким активным сопротивлением, в котором будет бесполезно превращаться в теплоту четверть энергии вращающегося магнитного поля. Недостатком такого регулирования может являться и то обстоятельство, что включение реостата в цепь ротора делает механическую характеристику двигателя мягче, следовательно, уменьшает стабильность его частоты вращения. При включенном реостате малые изменения нагрузки на валу вызывают значительные изменения частоты вращения двигателя.
показывает, что доля механической мощности уменьшается прямо пропорционально уменьшению частоты вращения ротора, в то же время соответственно увеличивается доля мощности потерь в активном сопротивлении цепи ротора. Следовательно, для уменьшения частоты вращения двигателя, например, на 25% нужно включить в цепь ротора реостат с таким активным сопротивлением, в котором будет бесполезно превращаться в теплоту четверть энергии вращающегося магнитного поля. Недостатком такого регулирования может являться и то обстоятельство, что включение реостата в цепь ротора делает механическую характеристику двигателя мягче, следовательно, уменьшает стабильность его частоты вращения. При включенном реостате малые изменения нагрузки на валу вызывают значительные изменения частоты вращения двигателя.
studfiles.net
Частотное управление. У трехфазных асинхронных двигателей наиболее перспективным способом плавного регулирования является изменение частоты напряжения питания f (cм.(3.7)).При этом следует иметь в виду, что для наилучшего использования двигателя изменение частоты должно сопровождаться изменением амплитуды напряжения питания U. Объясняется это тем, что при неизменной амплитуде напряжения и регулировании частоты изменяется магнитный поток машины Фм=U/(4,44fw1.эф). Уменьшение f вызовет увеличение Фм, что может привести к насыщению магнитопровода, резкому возрастанию намагничивающего тока и перегреву как стали, так и обмоток статора. Увеличе¬ние f приводит к уменьшению Фм, что при Мст=const вызовет рост тока в роторе и, соответственно, перегрев ротора при недоиспользовании стали.
Закон изменения напряжения зависит от изменения частоты питания и характера нагрузки. Например, если статический момент нагрузки Мстне зависит от скорости, то необходимо при регулировании частоты f так изменять напряжение U, чтобы
U /f = const. (3.8)
При этом в широком диапазоне сохраняется перегрузочная способность двигателя Мmax / Мном.
Частотный способ позволяет устанавливать угловую скорость выше и ниже номинальной. Увеличение угловой скорости допускается (в основном из условий механической прочности) в 1,5-2 раза больше номинальной. Нижний предел скорости ограничен тем, что технически сложно получить источники питания с низкой частотой, а также добиться достаточно равномерного вращения ротора двигателя. В разомкнутом приводе частотный способ управления позволяет изменять угловую скорость в диапазоне D = (20 - 30):1; в замкнутом приводе диапазон может быть существенно расширен с помощью обратных связей по скорости, току и напряжению.
Препятствием для широкого внедрения частотного способа является сложность и весьма высокая стоимость полупроводниковых преобразователей частоты. Схема и алгоритмы управления таким приводом получаются более сложными, чем приводом посто¬янного тока, так как управлять приходится сразу двумя взаимосвязанными величинами: частотой напряжения и магнитным потоком - при существенно нелинейных характеристиках.
Однако асинхронные двигатели с короткозамкнутым ротором благодаря отсутствию скользящего контакта являются более надежными и требуют меньше ухода в эксплуатации, чем коллекторные двигатели постоянного тока. При одинаковой мощности их стоимость в несколько раз меньше. Поэтому создание регулируемых асинхронных приводов с частотным управлением в целом ряде случаев является перспективным.
Система «Преобразователь частоты – трехфазный асинхронный двигатель»(ПЧ–АД).Силовые преобразователи частоты и амплитуды напряжения для частотного управления асинхронными двигателями выполняются в настоящее время на силовых полупроводниковых элементах. Преобразователи частоты можно разделить на две основные группы: преобразователи с промежуточным звеном постоянного тока и преобразователи с непосредственной связью первичной и вторичной цепей.
Широкое распространение получили преобразователи с промежуточным звеном постоянного тока (рис.3.6). В рассматриваемых преобразователях переменное напряжение питающей сети выпрямляется, фильтруется и подается на управляемый инвертор, который преобразует постоянное напряжение в переменное с регулируемой частотой. Выпрямители преобразователей в свою очередь могут быть управляемые и неуправляемые.
В преобразователе частоты (ПЧ) с управляемым выпрямителем УВ (рис. 3.6,а) напряжение U1~, подаваемое на двигатель АД, регулируется по амплитуде за счет изменения напряжения постоянного тока U? на выходе УВ. Управляемый выпрямитель преобразователей частоты по схеме и принципу действия не отличается от УВ, применяемых в электроприводе постоянного тока (см. Лекция 2.2).Управление работой выпрямителя и управляемого инвертора УИ осуществляет блок управления БУ.

Рисунок 3.6
Принцип действия управляемого инвертора рассмотрим на примере инвертора, выполненного по трехфазной мостовой схеме и работающего на чисто активную нагрузку (рис. 3.7,а). В управляемом инверторе силовыми элементами должны быть полностью управляемые полупроводниковые приборы, т.е. способные открываться и закрываться под воздействием соответствующих сигналов управления. Этому требованию отвечают либо транзисторы, работающие в ключевом режиме, либо тиристоры в совокупности со схемой искусственной коммутации (см. Лекция 2.3), либо запираемые тиристоры. В общем виде эти силовые элементы обозначены на рисунке как ключи К1-К6. На вход УИ подано напряжение постоянного тока U, переключение в схеме происходит по команде блока управления каждую часть периода требуемой выходной частоты. При этом каждый ключ замкнут либо периода выходной частоты, либо периода. На рис. 3.7,б в качестве примера показаны временные диаграммы формирования выходного напряжения в фазах А, В, С сопротивления нагрузки Rн для первого случая.

Рисунок 3.7
Как видно, на каждом такте коммутации схемы одновременно проводят ток три ключа (во втором случае – два ключа). Например, на первом такте открыты ключи с номерами 1, 2, 3 и ток протекает по цепи, в которой последовательно с сопротивлением фазы С включены параллельно соединенные сопротивления фаз А и В. При этом в фазе С падает приложенного напряжения U, в фазах А и В – по U. Знак падения напряжения определяется направлением тока в фазе. За положительное падение напряжения принято такое, которое создается током, протекающим к общей точке фаз нагрузки. По мере переключения ключей напряжение в фазах ступенчато изменяется и на нагрузке формируется симметричная трехфазная система напряжений прямоугольно-ступенчатой формы. Первые гармоники этих напряжений требуемой частоты (пунктирные линии на рис. 3.6,б) имеют фазовый сдвиг 120°. Высшие гармоники могут быть отфильтрованы LC-фильтрами. Частота выходного напряжения определяется частотой коммутации ключей, порядок следования напряжений – порядком коммутации ключей.
При активной нагрузке, показанной на рис. 3.7,а, по закону изменения напряжения будут изменяться и токи. Однако обмотки статора асинхронного двигателя являются для инвертора активно-индуктивной нагрузкой и закон изменения выходного тока инвертора не будет совпадать с законом изменения напряжения. Это обстоятельство предъявляет определенные требования к схемам инверторов.
В преобразователе частоты с неуправляемым выпрямителем НВ (рис.3.6,б) выпрямленное напряжение преобразуется с помощью транзисторного широтно-импульсного модулятора (ШИМ) в импульсное напряжение на входе инвертора, частота импульсов должна быть значительно больше верхнего предела рабочей частоты на выходе инвертора.
При обычной широтно-импульсной модуляции каждый силовой ключ инвертора (рис.3.7,а) включается и отключается не один раз за такт формируемого выходного напряжения (рис.3.7,б), а несколько. Среднее значение напряжения на такте в режиме непрерывного тока (см.Лекция 2.3) примерно равно ε – относительной продолжительности импульсов ШИМ. Изменяя ε , можно регулировать значение напряжения U1~ на выходе инвертора. Способ близок по обеспечению синусоидальной формы выходного напряжения к системе УВ – АД ,но лучше него по энергетическим характеристикам во всем диапазоне регулирования частоты и напряжения.
Более перспективным является синусный способ широтно-импульсного регулирования, который заключается в том, что длительность открытого состояния силовых ключей не остается постоянной в течение полупериода выходной частоты, а изменяется по синусоидальному закону. Если при этом частота переключения силовых ключей существенно выше выходной частоты инвертора, то в выходном напряжении кроме основной гармоники присутствуют лишь гармоники весьма высокого порядка, которые отфильтровываются индуктивностями обмоток самого двигателя.
Блок управления преобразователем частоты состоит из схемы управления выпрямителем, схемы управления инвертором и схемы совместного управления. Блок управления позволяет получать требуемые характеристики асинхронного электропривода при частотном управлении. Наиболее типичными законами автоматического управления являются:
1. Частотное управление, при котором изменение частоты сопровождается нелинейным изменением напряжения статора; в схеме управления требуется применение функционального преобразователя координат;
2. Частотно-токовое управление, при котором изменение частоты сопровождается нелинейным изменением тока статора; в схеме управления требуется применение функционального преобразователя координат;
3. Векторное управление, основанное на непосредственном контроле значения и положения магнитного потока в воздушном зазоре машины или положения ротора, а также мгновенных значений токов статора; в схеме управления требуется целый ряд блоков векторного преобразования координат.
studfiles.net
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
ВОЛГОГРАДСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
КАФЕДРА «ЭЛЕКТРОТЕХНИКА»
на тему:
«Регулирование скорости (частоты вращения)
асинхронного двигателя»
Выполнил: ст. группы ТОА-328
Скребец П. В.
Проверил: доц. Николаева С.И.
ВОЛГОГРАД 2004
Содержание:
1. Способы регулирования асинхронного двигателя…………………………………3
2. Частотное регулирование асинхронных электроприводов………………………..6
3. Регулирование скорости, тока и момента с помощью резисторов в цепях ротора и статора…………………………………………………………………………………8
4. Регулирование скорости АД изменением числа пар полюсов…………………...12
1. Способы регулирования асинхронного двигателя
Асинхронный двигатель является наиболее массовым электрическим двигателем. Эти двигатели выпускаются мощностью от 0,1 кВт до нескольких тысяч киловатт и находят применение во всех отраслях хозяйства. Основным достоинством асинхронного двигателя является простота его конструкции и невысокая стоимость. Однако по принципу своего действия асинхронный двигатель в обычной схеме включения не допускает регулирования скорости его вращения. Особое внимание следует обратить на то, что во избежание значительных потерь энергии, а, следовательно, для короткозамкнутых асинхронных двигателей во избежание перегрева его ротора, двигатель должен работать в длительном режиме с минимальными значениями скольжения.
Рассмотрим возможные способы регулирования скорости асинхронных двигателей (см. рис.1). Скорость двигателя определяется двумя параметрами: скоростью вращения электромагнитного поля статора ω0 и скольжением s:

 Рис.1. Классификация способов регулирования асинхронных двигателей
Рис.1. Классификация способов регулирования асинхронных двигателей
Исходя из (1) принципиально возможны два способа регулирования скорости: регулирование скорости вращения поля статора и регулирование скольжения при постоянной величине ω0.
Скорость вращения поля статора определяется двумя параметрами (см.3.3): частотой напряжения, подводимого к обмоткам статора f1, и числом пар полюсов двигателя рп. В соответствии с этим возможны два способа регулирования скорости: изменение частоты питающего напряжения посредством преобразователей частоты, включаемых в цепь статора двигателя (частотное регулирование), и путем изменения числа пар полюсов двигателя.
Регулирование скольжения двигателя при постоянной скорости вращения поля статора для короткозамкнутых асинхронных двигателей возможно путем изменения величины напряжения статора при постоянной частоте этого напряжения. Для асинхронных двигателей с фазным ротором, кроме того, возможны еще два способа: введение в цепь ротора добавочных сопротивлений (реостатное регулирование) и введение в цепь ротора добавочной регулируемой э.д.с. посредством преобразователей частоты, включаемых в цепь ротора (асинхронный вентильный каскад и двигатель двойного питания).
В настоящее время благодаря развитию силовой преобразовательной техники созданы и серийно выпускаются различные виды полупроводниковых преобразователей частоты, что определило опережающее развитие и широкое применение частотно-регулируемого асинхронного электропривода. Основными достоинствами этой системы регулируемого электропривода являются:
- плавность регулирования и высокая жесткость механических характеристик, что позволяет регулировать скорость в широком диапазоне;
- экономичность регулирования, определяемая тем, что двигатель работает с малыми величинами абсолютного скольжения, и потери в двигателе не превышают номинальных.
Недостатками частотного регулирования являются сложность и высокая стоимость (особенно для приводов большой мощности) преобразователей частоты и сложность реализации в большинстве схем режима рекуперативного торможения.
Подробно принципы и схемы частотного регулирования скорости асинхронного двигателя рассмотрены ниже.
Изменение скорости переключением числа пар полюсов асинхронного двигателя позволяет получать несколько (от 2 до 4) значений рабочих скоростей, т.е. плавное регулирование скорости и формирование переходных процессов при этом способе невозможно.
Поэтому данный способ имеет определенные области применения, но не может рассматриваться, как основа для построения систем регулируемого электропривода.
studfiles.net
Во всем мире с успехом реализуются принципы частотного управления асинхронным электроприводом. Способ предусматривает кроме значительной экономии электроэнергии, усовершенствованное управление работы агрегатов, и ведет к существенному энергосбережению.
Скорость вращения вала электродвигателя зависит от частоты подаваемого питающего напряжения. Использование частотных преобразователей повсеместно признано самым эффективным методом регулировки скорости вращения. Действие устройства заключается в формировании из значения выходного напряжения (U), характеризуемого постоянной частотой (F) и амплитудой (A), в напряжение с переменными параметрами. Это приводит к изменению величины частоты магнитного поля, изменяющего механическое вращение вала двигателя.
Принимая во внимание, что момент нагрузки постоянен, сила тока зависит от нагрузки, соответственно, происходит изменение подаваемого на клеммы двигателя напряжения пропорционального частоте, это сохраняет неизменным поток намагничивания и постоянный крутящий момент, а также неизменное значение тока.
Как следствие этих процессов, наблюдается постоянная корректировка скорости и вращающего момента в отношении рабочей нагрузки. Потери – минимальны, это достигается при помощи поддержания постоянного скольжения при любой скорости, для всех нагрузок.

Для регулировки рекомендуется применить выходное ШИМ напряжение. Устройство служит промежуточным звеном с возможностью управления расположенное между сетевым напряжением и машиной асинхронного типа.
Сигнал заданного значения напряжения и определенной частоты, получается по прохождении трех этапов – это:

Рис №1. Три основных звена, из которых состоит устройство частотного преобразователя.
Существует два основных типа управления скоростью вращения, являющимися базовыми способами, это:
При использовании этого типа управления, происходит сохранение соотношения U/F в неизменном виде по всему частотному интервалу для сохранения постоянного магнитного потока (Ф) электрического двигателя. Данный метод применяется при отсутствии надобности стремительного реагирования на колебания момента вращения и число оборотов.
Скалярное регулировании позволяет от одного частотного устройства запитать несколько рабочих асинхронных машин. При скалярном регулировании применяется компенсация скольжения за счет снижения скорости. Происходит увеличение постоянного момента вращения за счет повышения коэффициента V/F, это компенсирует понижение значения напряжения на статоре двигателя. Этот способ прост конструктивно и не нуждается в значительной точности и быстром реагировании на изменения числа оборотов вала.
Увеличение эффективности в управлении рабочим приводом рекомендуется применить метод регулировки за счет изменения потокосцепления.
Самым точным и наиболее действенным считается метод векторного регулирования фазы тока в статоре машины и соответственно, фазой его магнитного поля относительно ротора. Для этого метода характерно применение датчика позиционирования или положения (энкодера), позволяющего показать точное положение ротора в каждый вращающий момент. Применение датчиков положения способно увеличить стоимость электропривода. С использованием энкодеров скорость можно регулировать с точностью до 0,01%.
Чтобы обойти такое ограничение рекомендуется применять в системе управления электродвигателем, преобразователь интегральных схем ASIC. Он создает адаптивную модель двигателя, выраженную математически с точным указанием величины токов, напряжений, сопротивления статора, индуктивность рассеивания на выходе. Делает возможным создание моделирования тепловых рабочих параметров двигателя при разных режимах работы.
Векторное управление без применения датчиков обратной связи способно обеспечить динамические погрешности, которые присутствуют в электроприводах с замкнутой обратной связью. Векторное управление без использования датчиков простое конструктивно, но весьма ограничено при использовании на невысоких скоростях, он отлично подходит для больших скоростей вращения.
Важно: для сетей переменного тока система использующая преобразователь частоты служит нелинейной импульсной нагрузкой, где присутствуют токовые гармоники, отрицательно влияющие на качественные параметры линии электропередач в зависимости от значения сопротивления линии. Высшие гармоники обладают более низкой амплитудой и тем легче могут быть отфильтрованы.
Гармонические токи способствуют увеличению электрических потерь и снижение коэффициента мощности, способствуют перегреву элементов сети, например: кабелей, трансформаторов, двигателей, конденсаторов.
Для преобразователей частоты обязательно наличие фильтрующего устройства. Снизить гармонические искажения можно за счет применения сетевых дросселей или DC-реакторов. Дроссель препятствует снижению величины напряжения на электродвигателе и способствует повышению его коэффициента мощности. Недостаток дросселя, он может привести нежелательному резонансу в общей системе электроснабжения, это происходит за счет неправильно выбранной комбинации его сопротивления с сопротивлением линии.
Рекомендуется сопротивление сетевого дросселя добавлять к существующему сопротивлению источника питания. При этом учитывается сопротивление трансформаторов и кабельных линий, в этом случае падение напряжения составит 2-4% и послужит для улучшения коэффициента мощности и уменьшения гармонических искажений на выходном токе.
Также сглаживающий реактор улучшает коэффициент мощности и служит для подавления или ослабления высших гармоник. Реактор помогает увеличить срок эксплуатации полупроводников, конденсаторных батарей. За счет этого происходит снижение значения тока выпрямительных диодов и уменьшается пульсация тока через конденсаторы.
 Частотный преобразователь для электродвигателя
Частотный преобразователь для электродвигателя Рис №2. Сетевой дроссель (реактор).
Для подавления радиопомех, которые генерируются инвертором, в частотном преобразователе используют фильтр радиопомех и модуль DBR, устройства используются для соответствия требованиям по электромагнитной совместимости.
Также для уменьшения гармоник используют многоуровневый преобразователь, что влечет некоторое увеличение стоимости оборудования, снижает надежность и усложняет управление. Хорошее решение этого вопроса можно наблюдать при улучшении качества ШИМ, выполняется оптимизация временной диаграммы – происходит: пространственно векторная модуляция, улучшается контроль напряжения, повышается эффективность системы (частотный преобразователь + электродвигатель)
Повышение КПД электрического двигателя достигается за счет увеличения частоты коммутации. При подключении от преобразователя, происходит сохранение КПД двигателя, по сравнению со стандартными двигателями.
Энергоэффективность достигается за счет снижения тепловых потерь и потерь в железе, это можно нормализировать при снижении скорости. Качество управления происходит вследствие исключения механических устройств, при которых возникают потери, и понижается надежность – это могут быть: заслонки, системы тормозов, задвижки и т. д.
Пишите комментарии, дополнения к статье, может я что-то пропустил. Загляните на карту сайта, буду рад, если вы найдете на моем сайте еще что-нибудь полезное. Всего доброго.
podvi.ru
ЭЛЕКТРИЧЕСКИЙ ПРИВОД
Изменение частоты питающего напряжения асинхронного двигателя влияет как на его синхронную скорость со0, так и на его реактивные сопротивления, которые меняются пропорционально изменению частоты:
Хaj — Хан • fj / fn, Х2Qj — Х2он ' flj! fin 5 Xm — XmH ' fj І /ін 5
(5.50)
где /ін - номинальное значение частоты напряжения статора асинхрон-
і
ного двигателя; Х1он, Х2он - индуктивное сопротивление рассеяния обмотки статора и индуктивное сопротивление рассеяния обмотки ротора, приведенное к обмотке статора при номинальной частоте питающей сети fin-
Если одновременно с частотой fXj изменять и переменное напряжение U j обмоток статора асинхронного двигателя, то появляется возможность реализовать в системах преобразователь частоты - асинхронный двигатель (ПЧ-АД) различные законы регулирования скорости. Для сравнительной оценки этих законов регулирования воспользуемся уравнением баланса мощностей. Мощность на валу двигателя
Р2 =Р-АР2 =(0-(l-s)-M, (5.51)
где Р - электромагнитная мощность, передаваемая от статора к ротору; АР2- мощность потерь в роторе.
Из (5.51) следует, что при любом способе регулирования скорости асинхронного двигателя важно согласовать регулировочные механические характеристики двигателя с его нагрузкой.
По характеру зависимости момента механизма от его скорости -
Мс = /(со) можно выделить следующие механические характеристики
производственных механизмов:
• не зависящая от угловой скорости механическая характеристика
Мс = const; Рс = к • со; (5.52)
• нелинейно-спадающая механическая характеристика или работа с постоянной мощностью
Мс = к • со-1; Рс = const; (5.53)
• нелинейно-возрастающая механическая характеристика или вентиляторная нагрузка
Мс = Ьсо2; Рс = Ьсо3. (5.54)
В частотно-регулируемых электроприводах переменного тока зависимости (5.52)-(5.54) можно сформировать и для электромагнитных моментов двигателей. Например, при постоянном моменте нагрузки (Мс = const) управление напряжением и частотой тока статора асинхронного двигателя должно осуществляться по закону
Uj / fj = const. (5.55)
При нелинейно-спадающей нагрузке Мс = к • со-1 -закон управления напряжением и частотой принимает вид
Uj jfij = const. (5.56)
2
Наконец, при «вентиляторной» нагрузке Мс = к ■ со напряжение и частота должны изменяться в соответствии с зависимостью
^ly//lj2 = const. (5.57)
Законы управления (5.55)-(5.57), связывающие напряжение, частоту и характер нагрузки, описываются формулой М. П. Костенко:
У1'=У*ТЬ1%’ (5'58)
где UiH - номинальное напряжение питающей сети, В; IIj - напряжение на выходе преобразователя частоты; Мс - статический момент на валу асинхронного двигателя при данной частоте.
Из (5.53) следует, что, например, для привода, работающего с постоянной мощностью, увеличение скорости в четыре раза приводит к уменьшению статического момента Мс также в четыре раза. При этом потери в стали и на намагничивание уменьшаются, а перегрузочная способность двигателя остается примерно постоянной:
М/мк= const’ (5-59)
| Рис. 5.35. Механические характеристики производственных механизмов и электроприводов преобразователь частоты - асинхронный двигатель Функциональная схема электропривода, выполненного по системе преобразователь частоты - асинхронный двигатель, реализующая различные законы управления класса Uj jfj, приведена на рис. 5.36. |
где Мк - критический момент двигателя, Н • м.
|
|
|
|
|
|
Таким образом, для того, чтобы наиболее эффективно реализовать принципы частотного управления асинхронным двигателем, необходимо в соответствии с видом нагрузки на валу двигателя управлять напряжением, подводимым к статору, взаимосвязано с изменением частоты тока статора. Перечисленные режимы управления достаточны для большинства механизмов. Однако закон управления (5.58) справедлив только в первом аналитическом приближении, когда активным сопротивлением статора Rx можно пренебречь. В действительности, при малых значениях частоты (f< 0,5 • /1н) падение напряжения на сопротивлении Rl существенно снижает величину напряжения, прикладываемого к контуру намагничивания, и критический момент асинхронного двигателя уменьшается. При более точном анализе, учитывающем падение напряжения на сопротивлении R±, механические характеристики принимают вид, показанный на рис. 5.35. Так, например, при законе управления U j j fj = const, предполагающем постоянство критического момента, наблюдается его снижение при уменьшении частоты fx
|
Рис. 5.36. Функциональная схема скалярного частотного управления скоростью асинхронного двигателя |
В этой схеме сигнал управления Uy определяет модуль напряжения статора.
При частотном регулировании скорости асинхронного двигателя необходимо учитывать, что реактивные сопротивления двигателя зависят от частоты питающего напряжения. При снижении частоты / ■ активное сопротивление Ry становится соизмеримым с реактивными сопротивлениями машины, поэтому расчет электромеханических и механических характеристик асинхронного двигателя производится в соответствии с уравнениями, приведенными в [6].
|
|
Электромеханическая характеристика, определяющая зависимость приведенного тока ротора от скольжения,
(5.60)
где Uij - фазное напряжение обмоток статора асинхронного двигателя; /і* = fj //ін - относительное значение частоты питающего напряжения.
|
|
|
|
h h, h
Рис. 5.37. Электромеханические характеристики /0 = /(со) для трех законов регулирования класса Ujj fj
Для короткозамкнутого асинхронного двигателя одной из основных является электромеханическая характеристика = /(со), отражающая зависимость тока статора /от скорости со (скольжения s). Ток статора / определяется путем сложения вектора тока намагничивания
/0 и вектора тока ротора /2 . Обычно это производится с помощью круговой диаграммы. 
| Механическая характеристика асинхронного двигателя имеет критический момент и критическое скольжение, которые определяются |
где (Dqj = 2- п - fij jр- синхронная угловая скорость; Ulj - фазное напряжение обмоток статора асинхронного двигателя.
|
|
Критическое скольжение
(5.65)
Знак «+» означает, что критический момент и скольжение относятся к двигательному режиму, знак «-» - к генераторному режиму рекуперативного торможения.
Механические характеристики, рассчитанные по (5.63) в математической системе MathCAD, приведены на рис. 5.39. С целью наглядного представления о регулировании скорости механические характеристики на рисунке приведены в координатах М = /(со*).
|
Рис. 5.39. Механические характеристики асинхронного двигателя типа 4А112МВ6УЗ при частотном регулировании скорости в соответствии с законом регулирования Uj j fj = const |
Анализ характеристик показывает значительное снижение критического момента асинхронного двигателя при частотном регулировании скорости в соответствии с законом регулирования Uj jfj = const.
|
|
| Рис. 5.40. Электромеханические характеристики асинхронного двигателя типа 4А112МВ6УЗ при частотном регулировании скорости в соответствии с законом регулирования UjJ fj = const |
|
|
| Расчет электромеханических характеристик /, = /(со*) произведем по уравнению (5.61): |
Пересчет скольжения s на угловую скорость со для каждой из характеристик проведем в соответствии с выражением со = со0 (1 — s). Так
|
|
как с изменением частоты / ■ и напряжения статора II j ток холостого хода /0 изменяется, то его значение для каждой из частот будем определять по выражению
(5.66)
Как следует из анализа электромеханических характеристик (см. рис. 5.43-5.45), регулирование скорости изменением частоты напряжения статора с законом регулирования Uj jfj = const приводит к значительному уменьшению пусковых токов, а в данном примере, как следствие - к уменьшению допустимого диапазона нагрузок для двигательного режима работы электропривода.
|
Рис. 5.41. Электромеханические характеристики I = /(со*) асинхронного двигателя типа 4А112МВ6УЗ при частотном регулировании скорости в соответствии с законом UjJ fj = const |
Поскольку с увеличением мощности электродвигателя значение сопротивления Ry в относительных единицах уменьшается, то у двигателей большой мощности с уменьшением частоты /j сокращение рабочего диапазона нагрузок происходит в меньшей степени.
В частотно-регулируемых асинхронных электроприводах векторное управление связано как с изменением частоты и текущих значений переменных (напряжения, тока статора, потокосцепления), так и со взаимной ориентацией их векторов в декартовой системе координат. …
Сигналом тока можно воздействовать как на канал напряжения, так и на канал частоты. Функциональная схема электропривода с положительными обратными связями по току в канале регулирования напряжения и частоты приведена на …
Если вектор напряжения Uj формируется векторным сложением напряжения задания U з, и сигнала / • /^ • ккм, вводимого с целью компенсации падения напряжения в фазах А, В и С …
msd.com.ua
Частотные преобразователи предназначены для плавного регулирования скорости асинхронного двигателя за счет создания на выходе преобразователя трехфазного напряжения переменной частоты. В простейших случаях регулирование частоты и напряжения происходит в соответствии с заданной характеристикой V/f, в наиболее совершенных преобразователях реализовано так называемое векторное управление. Принцип работы частотного преобразователя или как его часто называют - инвертора: переменное напряжение промышленной сети выпрямляется блоком выпрямительных диодов и фильтруется батареей конденсаторов большой емкости для минимизации пульсаций полученного напряжения. Это напряжение подается на мостовую схему, включающую шесть управляемых IGBT или MOSFET транзисторов с диодами, включенными антипараллельно для защиты транзисторов от пробоя напряжением обратной полярности, возникающем при работе с обмотками двигателя. Кроме того, в схему иногда включают цепь "слива" энергии - транзистор с резистором большой мощности рассеивания. Эту схему используют в режиме торможения, чтобы гасить генерируемое напряжение двигателем и обезопасить конденсаторы от перезарядки и выхода из строя.Блок-схема инвертора показана ниже.Частотный преобразователь в комплекте с асинхронным электродвигателем позволяет заменить электропривод постоянного тока. Системы регулирования скорости двигателя постоянного тока достаточно просты, но слабым местом такого электропривода является электродвигатель. Он дорог и ненадежен. При работе происходит искрение щеток, под воздействием электроэрозии изнашивается коллектор. Такой электродвигатель не может использоваться в запыленной и взрывоопасной среде. Принцип работы частотного преобразователя или как его часто называют - инвертора: переменное напряжение промышленной сети выпрямляется блоком выпрямительных диодов и фильтруется батареей конденсаторов большой емкости для минимизации пульсаций полученного напряжения. Это напряжение подается на мостовую схему, включающую шесть управляемых IGBT или MOSFET транзисторов с диодами, включенными антипараллельно для защиты транзисторов от пробоя напряжением обратной полярности, возникающем при работе с обмотками двигателя. Кроме того, в схему иногда включают цепь "слива" энергии - транзистор с резистором большой мощности рассеивания. Эту схему используют в режиме торможения, чтобы гасить генерируемое напряжение двигателем и обезопасить конденсаторы от перезарядки и выхода из строя.Блок-схема инвертора показана ниже.Частотный преобразователь в комплекте с асинхронным электродвигателем позволяет заменить электропривод постоянного тока. Системы регулирования скорости двигателя постоянного тока достаточно просты, но слабым местом такого электропривода является электродвигатель. Он дорог и ненадежен. При работе происходит искрение щеток, под воздействием электроэрозии изнашивается коллектор. Такой электродвигатель не может использоваться в запыленной и взрывоопасной среде. Асинхронные электродвигатели превосходят двигатели постоянного тока по многим параметрам: они просты по устройству и надежны, так как не имеют подвижных контактов. Они имеют меньшие по сравнению с двигателями постоянного тока размеры, массу и стоимость при той же мощности. Асинхронные двигатели просты в изготовлении и эксплуатации.Основной недостаток асинхронных электродвигателей – сложность регулирования их скорости традиционными методами (изменением питающего напряжения, введением дополнительных сопротивлений в цепь обмоток).Управление асинхронным электродвигателем в частотном режиме до недавнего времени было большой проблемой, хотя теория частотного регулирования была разработана еще в тридцатых годах. Развитие частотно-регулируемого электропривода сдерживалось высокой стоимостью преобразователей частоты. Появление силовых схем с IGBT-транзисторами, разработка высокопроизводительных микропроцессорных систем управления позволило различным фирмам Европы, США и Японии создать современные преобразователи частоты доступной стоимости.Регулирование частоты вращения исполнительных механизмов можно осуществлять при помощи различных устройств: механических вариаторов, гидравлических муфт, дополнительно вводимыми в статор или ротор резисторами, электромеханическими преобразователями частоты, статическими преобразователями частоты.Применение первых четырех устройств не обеспечивает высокого качества регулирования скорости, неэкономично, требует больших затрат при монтаже и эксплуатации. Статические преобразователи частоты являются наиболее совершенными устройствами управления асинхронным приводом в настоящее время.Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту f1 питающего напряжения, можно в соответствии с выражением Вариант схемы подключения частотного преобразователя фирмы Omron.
Подключение частотных преобразователей с соблюдением требований ЭМС Техническая информация преобразователи частоты |
www.110volt.ru
Частота вращения асинхронного двигателя определяется формулой
 , (57)
, (57)
 . (57а)
. (57а)
из которой следует три принципиально возможных метода регулирования скорости асинхронных двигателей: изменением частоты  питающего напряжения, числа пар полюсов
питающего напряжения, числа пар полюсов  и величины скольжения
и величины скольжения  .
.
Частотное регулирование. Этот способ регулирования скорости позволяет применять наиболее надежные и дешевые асинхронные двигателя с короткозамкнутым ротором. Однако для изменения частоты питающего напряжения требуется наличие источника электрического тока переменной частоты. В качестве последнего можно использовать: синхронный генератор с переменной частотой вращения; преобразователи частоты: электромашинные или статические, выполненные на полупроводниковых тиристорах или силовых транзисторах.
При частотном регулировании скорости можно регулировать вниз от  (номинальной скорости) и вверх от номинальной. При регулировании скорости вниз от номинальной с изменением частоты изменяют подводимое напряжение
(номинальной скорости) и вверх от номинальной. При регулировании скорости вниз от номинальной с изменением частоты изменяют подводимое напряжение  ; при этом магнитный поток
; при этом магнитный поток  остаётся неизменным. Графики механических характеристик представлены на рис, 73.
остаётся неизменным. Графики механических характеристик представлены на рис, 73.








Рис. 73. Механические характеристики
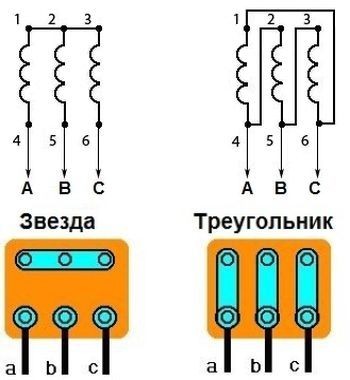
Регулирование путем изменения числа пар полюсов. Такое регулирование позволяет получить ступенчатое изменение частоты вращения. На рис. 74 показана простейшая схема (для одной фазы), позволяющая изменять число полюсов обмотки статора в два раза. Для этой цели каждую фазу обмотки статора разделяют на две части, которые переключают с последовательного соединения на параллельное. Из рисунка видно, что при включении катушек в две параллельные ветви число полюсов уменьшается в два раза, а следовательно, частота вращения магнитного поля в два раза увеличивается.
а) б)

Рис. 74. Схема переключения обмотки статора для изменения числа полюсов:
а – при 2р=4, б – при 2р=2.
При переключении число последовательно включенных витков в каждой фазе уменьшается вдвое, но так как частота вращения возрастает в два раза, ЭДС, индуктированная в фазе, остается неизменной. Следовательно, двигатель при обеих частотах вращения может быть подключен к сети с одинаковым напряжением. Чтобы не осуществлять переключения в обмотке ротора, последнюю выполняют короткозамкнутой. Если нужно иметь три или четыре частоты вращения, то на статоре располагают еще одну обмотку, при переключении которой можно получить дополнительно две частоты. Асинхронные двигатели с переключением числа полюсов называют многоскоростными.
Регулирование скорости изменением скольжения, осуществляется:
а) путем включения в цепь ротора добавочного активного сопротивления (рис. 75). Этот способ регулирования может быть использован только для двигателя с фазным ротором. Он позволяет плавно изменять частоту вращения в широкий пределах.


Рис. 75. Изменение формы механической характеристики при регулировании
частоты вращения с помощью добавочного сопротивления
Недостатками его являются:
1) большие потери энергии в регулировочном реостате;
2) чрезвычайно "мягкая" механическая характеристика двигателя при большом сопротивлении в цепи ротора. В некоторых случаях последнее является недопустимым, так как небольшому изменению нагрузочного момента соответствует существенное изменение частоты вращения.
б) регулирование путем изменения величины питающего напряжения в небольшом диапазоне.
www.poznayka.org













 неизменном числе пар полюсов p изменять угловую скорость магнитного поля статора.Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью.Регулирование скорости при этом не сопровождается увеличением скольжения асинхронного двигателя, поэтому потери мощности при регулировании невелики.Для получения высоких энергетических показателей асинхронного двигателя – коэффициентов мощности, полезного действия, перегрузочной способности – необходимо одновременно с частотой изменять и подводимое напряжение.Закон изменения напряжения зависит от характера момента нагрузки Mс. При постоянном моменте нагрузки Mс=const напряжение на статоре должно регулироваться пропорционально частоте:
неизменном числе пар полюсов p изменять угловую скорость магнитного поля статора.Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью.Регулирование скорости при этом не сопровождается увеличением скольжения асинхронного двигателя, поэтому потери мощности при регулировании невелики.Для получения высоких энергетических показателей асинхронного двигателя – коэффициентов мощности, полезного действия, перегрузочной способности – необходимо одновременно с частотой изменять и подводимое напряжение.Закон изменения напряжения зависит от характера момента нагрузки Mс. При постоянном моменте нагрузки Mс=const напряжение на статоре должно регулироваться пропорционально частоте: Для вентиляторного характера момента нагрузки это состояние имеет вид:
Для вентиляторного характера момента нагрузки это состояние имеет вид: При моменте нагрузки, обратно пропорциональном скорости:
При моменте нагрузки, обратно пропорциональном скорости: Таким образом, для плавного бесступенчатого регулирования частоты вращения вала асинхронного электродвигателя, преобразователь частоты должен обеспечивать одновременное регулирование частоты и напряжения на статорной обмотке асинхронного двигателя.Преимущества использования регулируемого электропривода в технологических процессахПрименение регулируемого электропривода обеспечивает энергосбережение и позволяет получать новые качества систем и объектов. Значительная экономия электроэнергии обеспечивается за счет регулирования какого-либо технологического параметра. Если это транспортер или конвейер, то можно регулировать скорость его движения. Если это насос или вентилятор – можно поддерживать давление или регулировать производительность. Если это станок, то можно плавно регулировать скорость подачи или главного движения.Особый экономический эффект от использования преобразователей частоты дает применение частотного регулирования на объектах, обеспечивающих транспортировку жидкостей. До сих пор самым распространённым способом регулирования производительности таких объектов является использование задвижек или регулирующих клапанов, но сегодня доступным становится частотное регулирование асинхронного двигателя, приводящего в движение, например, рабочее колесо насосного агрегата или вентилятора. При использовании частотных регуляторов обеспечивается плавная регулировка скорости вращения позволяет в большинстве случаев отказаться от использования редукторов, вариаторов, дросселей и другой регулирующей аппаратуры.При подключении через частотный преобразователь пуск двигателя происходит плавно, без пусковых токов и ударов, что снижает нагрузку на двигатель и механизмы, тем самым увеличивает срок их службы.Перспективность частотного регулирования наглядно видна из рисунка
Таким образом, для плавного бесступенчатого регулирования частоты вращения вала асинхронного электродвигателя, преобразователь частоты должен обеспечивать одновременное регулирование частоты и напряжения на статорной обмотке асинхронного двигателя.Преимущества использования регулируемого электропривода в технологических процессахПрименение регулируемого электропривода обеспечивает энергосбережение и позволяет получать новые качества систем и объектов. Значительная экономия электроэнергии обеспечивается за счет регулирования какого-либо технологического параметра. Если это транспортер или конвейер, то можно регулировать скорость его движения. Если это насос или вентилятор – можно поддерживать давление или регулировать производительность. Если это станок, то можно плавно регулировать скорость подачи или главного движения.Особый экономический эффект от использования преобразователей частоты дает применение частотного регулирования на объектах, обеспечивающих транспортировку жидкостей. До сих пор самым распространённым способом регулирования производительности таких объектов является использование задвижек или регулирующих клапанов, но сегодня доступным становится частотное регулирование асинхронного двигателя, приводящего в движение, например, рабочее колесо насосного агрегата или вентилятора. При использовании частотных регуляторов обеспечивается плавная регулировка скорости вращения позволяет в большинстве случаев отказаться от использования редукторов, вариаторов, дросселей и другой регулирующей аппаратуры.При подключении через частотный преобразователь пуск двигателя происходит плавно, без пусковых токов и ударов, что снижает нагрузку на двигатель и механизмы, тем самым увеличивает срок их службы.Перспективность частотного регулирования наглядно видна из рисунка Таким образом, при дросселировании поток вещества, сдерживаемый задвижкой или клапаном, не совершает полезной работы. Применение регулируемого электропривода насоса или вентилятора позволяет задать необходимое давление или расход, что обеспечит не только экономию электроэнергии, но и снизит потери транспортируемого вещества.Структура частотного преобразователяБольшинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока.Силовой трехфазный импульсный инвертор состоит из шести транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя.В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями.Принцип работы преобразователя частотыПреобразователь частоты состоит из неуправляемого диодного силового выпрямителя В, автономного инвертора , системы управления ШИМ, системы автоматического регулирования, дросселя Lв и конденсатора фильтра Cв. Регулирование выходной частоты fвых. и напряжения Uвых осуществляется в инверторе за счет высокочастотного широтно-импульсного управления.Широтно-импульсное управление характеризуется периодом модуляции, внутри которого обмотка статора электродвигателя подключается поочередно к положительному и отрицательному полюсам выпрямителя.Длительность этих состояний внутри периода ШИМ модулируется по синусоидальному закону. При высоких (обычно 2…15 кГц) тактовых частотах ШИМ, в обмотках электродвигателя, вследствие их фильтрующих свойств, текут синусоидальные токи.
Таким образом, при дросселировании поток вещества, сдерживаемый задвижкой или клапаном, не совершает полезной работы. Применение регулируемого электропривода насоса или вентилятора позволяет задать необходимое давление или расход, что обеспечит не только экономию электроэнергии, но и снизит потери транспортируемого вещества.Структура частотного преобразователяБольшинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока.Силовой трехфазный импульсный инвертор состоит из шести транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя.В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями.Принцип работы преобразователя частотыПреобразователь частоты состоит из неуправляемого диодного силового выпрямителя В, автономного инвертора , системы управления ШИМ, системы автоматического регулирования, дросселя Lв и конденсатора фильтра Cв. Регулирование выходной частоты fвых. и напряжения Uвых осуществляется в инверторе за счет высокочастотного широтно-импульсного управления.Широтно-импульсное управление характеризуется периодом модуляции, внутри которого обмотка статора электродвигателя подключается поочередно к положительному и отрицательному полюсам выпрямителя.Длительность этих состояний внутри периода ШИМ модулируется по синусоидальному закону. При высоких (обычно 2…15 кГц) тактовых частотах ШИМ, в обмотках электродвигателя, вследствие их фильтрующих свойств, текут синусоидальные токи. Таким образом, форма кривой выходного напряжения представляет собой высокочастотную двухполярную последовательность прямоугольных импульсов (рис. 3).Частота импульсов определяется частотой ШИМ, длительность (ширина) импульсов в течение периода выходной частоты АИН промодулирована по синусоидальному закону. Форма кривой выходного тока (тока в обмотках асинхронного электродвигателя) практически синусоидальна.Регулирование выходного напряжения инвертора можно осуществить двумя способами: амплитудным (АР) за счет изменения входного напряжения Uв и широтно-импульсным (ШИМ) за счет изменения программы переключения вентилей V1-V6 при Uв = const.Второй способ получил распространение в современных преобразователях частоты благодаря развитию современной элементной базы (микропроцессоры, IBGT-транзисторы). При широтно-импульсной модуляции форма токов в обмотках статора асинхронного двигателя получается близкой к синусоидальной благодаря фильтрующим свойствам самих обмоток.
Таким образом, форма кривой выходного напряжения представляет собой высокочастотную двухполярную последовательность прямоугольных импульсов (рис. 3).Частота импульсов определяется частотой ШИМ, длительность (ширина) импульсов в течение периода выходной частоты АИН промодулирована по синусоидальному закону. Форма кривой выходного тока (тока в обмотках асинхронного электродвигателя) практически синусоидальна.Регулирование выходного напряжения инвертора можно осуществить двумя способами: амплитудным (АР) за счет изменения входного напряжения Uв и широтно-импульсным (ШИМ) за счет изменения программы переключения вентилей V1-V6 при Uв = const.Второй способ получил распространение в современных преобразователях частоты благодаря развитию современной элементной базы (микропроцессоры, IBGT-транзисторы). При широтно-импульсной модуляции форма токов в обмотках статора асинхронного двигателя получается близкой к синусоидальной благодаря фильтрующим свойствам самих обмоток. Такое управление позволяет получить высокий КПД преобразователя и эквивалентно аналоговому управлению с помощью частоты и амплитуды напряжения.Современные инверторы выполняются на основе полностью управляемых силовых полупроводниковых приборов – запираемых GTO – тиристоров, либо биполярных IGBT-транзисторов с изолированным затвором. На рис. 2.45 представлена 3-х фазная мостовая схема автономного инвертора на IGBT-транзисторах.Она состоит из входного емкостного фильтра Cф и шести IGBT-транзисторов V1-V6 включенными встречно-параллельно диодами обратного тока D1-D6.За счет поочередного переключения вентилей V1-V6 по алгоритму, заданному системой управления, постоянное входной напряжение Uв преобразуется в переменное прямоугольно-импульсное выходное напряжение. Через управляемые ключи V1-V6 протекает активная составляющая тока асинхронного электродвигателя, через диоды D1-D6 – реактивная составляющая тока.
Такое управление позволяет получить высокий КПД преобразователя и эквивалентно аналоговому управлению с помощью частоты и амплитуды напряжения.Современные инверторы выполняются на основе полностью управляемых силовых полупроводниковых приборов – запираемых GTO – тиристоров, либо биполярных IGBT-транзисторов с изолированным затвором. На рис. 2.45 представлена 3-х фазная мостовая схема автономного инвертора на IGBT-транзисторах.Она состоит из входного емкостного фильтра Cф и шести IGBT-транзисторов V1-V6 включенными встречно-параллельно диодами обратного тока D1-D6.За счет поочередного переключения вентилей V1-V6 по алгоритму, заданному системой управления, постоянное входной напряжение Uв преобразуется в переменное прямоугольно-импульсное выходное напряжение. Через управляемые ключи V1-V6 протекает активная составляющая тока асинхронного электродвигателя, через диоды D1-D6 – реактивная составляющая тока. И – трехфазный мостовой инвертор;В – трехфазный мостовой выпрямитель;Сф – конденсатор фильтра;
И – трехфазный мостовой инвертор;В – трехфазный мостовой выпрямитель;Сф – конденсатор фильтра;
 Монтаж и подключение с соблюдением требований ЭМС подробно описаны в соответствующих руководствах на устройства.
Монтаж и подключение с соблюдением требований ЭМС подробно описаны в соответствующих руководствах на устройства.