Асинхронные двигатели переменного тока являются самыми применяемыми электродвигателями абсолютно во всех хозяйственных сферах. В их преимуществах отмечается конструктивная простота и небольшая цена. При этом немаловажное значение имеет регулирование скорости асинхронного двигателя. Существующие способы показаны ниже.
Согласно структурной схеме скоростью электродвигателя можно управлять в двух направлениях, то есть изменением величин:

Первый вариант коррекции, используемый для моделей с короткозамкнутым ротором, осуществляется за счет изменения:
В основе второго варианта, применяемого для модификации с фазным ротором, лежат:
Вследствие развития силовой преобразовательной техники на текущий момент в широком масштабе изготовляются всевозможные виды частотников, что определило активное применение частотно-регулируемого привода. Рассмотрим наиболее распространённые методы.
Всего десять лет назад в торговой сети регуляторов частоты вращения скорости ЭД было небольшое количество. Причиной тому служило то, что тогда ещё не производились дешёвые силовые высоковольтные транзисторы и модули.
На сегодня частотное преобразование – самый распространённый способ регулирования скорости двигателей. Трёхфазные преобразователи частоты создаются для управления 3-фазными электродвигателями.

Однофазные же двигатели управляются:
Для двигателей повседневного предназначения легко можно выполнить необходимые расчеты, и своими руками произвести сборку устройства на полупроводниковой микросхеме. Пример схемы регулятора электродвигателя приведён ниже. Такая схема позволяет добиться контроля параметров приводной системы, затрат на техническое обслуживание, снижения потребления электричества наполовину.

Принципиальная схема регулятора оборотов вращения ЭД для повседневных нужд значительно упрощается, если применить так называемый симистор.

Обороты вращения ЭД регулируются с помощью потенциометра, определяющего фазу входного импульсного сигнала, открывающего симистор. На изображении видно, что в качестве ключей применяются два тиристора, подключённых встречно-параллельно. Тиристорный регулятор оборотов ЭД 220 В достаточно часто применяется для регулирования такой нагрузки, как диммеры, вентиляторы и нагревательная техника. От оборотов вращения асинхронного ЭД зависят технические показатели и эффективность работы двигательного оборудования.
На технорынке сегодня предлагаются в большом ассортименте регуляторы и частотные преобразователи для асинхронных электродвигателей переменного тока.
Управление способом варьирования частоты на данный момент – самый оптимальный способ, т. к. он позволяет плавно регулировать скорость асинхронного ЭД в широчайшем диапазоне, без значительных потерь и снижения перегрузочных способностей.
Тем не менее, на основе расчёта, можно самостоятельно собрать простое и эффективное устройство с регулированием оборотов вращения однофазных электродвигателей с помощью тиристоров.
electricdoma.ru
 Качественный обмен воздуха в помещении в значительной мере влияет на комфорт жизни в квартире. Чистый воздух, сухие стены, мягкий микроклимат в доме напрямую зависит от наличия системы вентиляции. При этом к самой популярной на сегодняшний день системе обмена воздушных потоков в помещении относится принудительная вентиляция, работающая по приточно-вытяжному принципу.
Качественный обмен воздуха в помещении в значительной мере влияет на комфорт жизни в квартире. Чистый воздух, сухие стены, мягкий микроклимат в доме напрямую зависит от наличия системы вентиляции. При этом к самой популярной на сегодняшний день системе обмена воздушных потоков в помещении относится принудительная вентиляция, работающая по приточно-вытяжному принципу.
Большинство современных вентиляторов для вытяжных систем снабжаются электродвигателем с регулируемой скоростью вращения. При этом для изменения оборотов вентилятора используют специальные регуляторы, в том числе и частотные системы изменения скорости вращения асинхронного двигателя, который используется как в вытяжных устройствах, так и в различных бытовых приборах в квартире.
Ещё не так давно устройства регулировки скорости вращения асинхронного электродвигателя состояли из простейших ручных выключателей и магнитного реле, благодаря которым можно было только запустить мотор на максимальных оборотах или выполнить полное его отключение.
Любой регулятор оборотов двигателя, в том числе и частотный, предназначен для изменения скорости вращения мотора. При этом основной функцией регулятора скорости является изменение производительности вытяжной системы или другого оборудования. Но помимо этого такие приборы обладают и дополнительными возможностями, о которых не стоит забывать:
Большинство приборов, регулирующих скорость вращения электродвигателя, могут быть использованы как отдельный элемент системы, так и являться дополнением электронного блока управления, бытовым прибором, приводящимся в действие мотором.
 Для изменения скорости вращения как асинхронного, так и любого другого двигателя, используется несколько вариантов регулировки оборотов:
Для изменения скорости вращения как асинхронного, так и любого другого двигателя, используется несколько вариантов регулировки оборотов:
Изменение напряжения даёт возможность использовать достаточно дешёвые устройства для плавной или многоступенчатой регулировки скорости. Если говорить об асинхронных моторах, которые имеют внешний ротор, то для них лучше использовать регулятор сопротивления якоря для изменения оборотов. При этом частотная регулировка позволяет изменять скоростные показатели в достаточно широком диапазоне.
 Устройства регулировки скорости для однофазных, трёхфазных и асинхронных двигателей различаются по принципиальному изменению оборотов вращения:
Устройства регулировки скорости для однофазных, трёхфазных и асинхронных двигателей различаются по принципиальному изменению оборотов вращения:
Тиристорные регуляторы скорости используются для однофазных двигателей и позволяют помимо изменения оборотов вращения защищать оборудование от перегрева и перепадов напряжения.
Симисторные устройства могут управлять сразу несколькими электромоторами, работающими как на постоянном, так и переменном токе, но при условии, что параметры мощности не будут превышать предельных значений. Такой способ изменения оборотов один из самых популярных, если необходимо регулировать скорость благодаря изменению показателей напряжения от минимального до номинального значения.
Трёхфазный регулятор, более точный, и снабжается предохранителем, контролирующим, уровень тока. А чтобы снизить шумовые эффекты на низких оборотах устанавливается сглаживающий фильтр, состоящий из конденсатора.
Частотный регулятор скорости для асинхронного двигателя используется при преобразовании входного напряжения в диапазоне от 0 до 480 вольт, а непосредственный контроль оборотов осуществляется благодаря изменению подаваемой электрической энергии. Чаще всего такие регуляторы используются в трёхфазных двигателях, систем кондиционирования и вентиляции достаточно большой мощности.
Также для мощных электромоторов используют регулятор на основе однофазного или трёхфазного трансформатора. Благодаря такому устройству появляется возможность ступенчатой регулировки скорости двигателей. При этом одним трансформатором можно управлять сразу несколькими устройствами в автоматическом режиме.
 Ещё нет так давно встретить частотный регулятор скорости для асинхронного двигателя было практически невозможно, а стоимость таких устройств была неоправданно высокой. При этом основной причиной дороговизны таких устройств было отсутствие качественных транзисторов и модулей высокого напряжения. Но благодаря разработкам в сфере твердотельных электронных устройств этот вопрос был решён. Вследствие этого рынок электроники заполонили сварочные инверторы, инверторные кондиционеры и частотные преобразователи.
Ещё нет так давно встретить частотный регулятор скорости для асинхронного двигателя было практически невозможно, а стоимость таких устройств была неоправданно высокой. При этом основной причиной дороговизны таких устройств было отсутствие качественных транзисторов и модулей высокого напряжения. Но благодаря разработкам в сфере твердотельных электронных устройств этот вопрос был решён. Вследствие этого рынок электроники заполонили сварочные инверторы, инверторные кондиционеры и частотные преобразователи.
На сегодняшний день, частотные регуляторы – самый распространённый метод регулировки, мощностных характеристик оборотов и уровня производительности большинства механизмов, которые приводятся в действие асинхронным трёхфазным электродвигателем.
При таком методе изменения скоростных показателей в электродвигателе, к нему подключается специальный частотный регулятор. В большинстве случаев это тиристорные преобразователи частоты. При этом сама регулировка оборотов осуществляется посредством изменения частотных показателей напряжения, которые непосредственно влияют на скорость вращения асинхронного электромотора.
Хочется отметить, что во время снижения частотных показателей падает, и перегрузочная способность электродвигателя и поэтому для компенсации мощностных потерь нужно увеличивать напряжение. При этом величина напряжения зависит от конструктивных особенностей привода. Если регулировка выполняется на моторе, работающем с постоянным уровнем нагрузки на валу, то величина напряжения увеличивается пропорционально падению частоты. Но при увеличении оборотов это недопустимо и может привести к выходу из строя двигателя.
В случае, когда частотная регулировка выполняется на электродвигателе постоянной мощности, то увеличение напряжения производится пропорционально корню квадратному падения частоты. При изменении оборотов в вентиляционных установках подаваемое напряжение изменяется пропорционально квадрату снижения частоты.
Частотные регуляторы скорости для асинхронных электродвигателей – единственно правильный способ изменения оборотов мотора. В первую очередь это обусловлено возможностью изменения скорости в максимально широком диапазоне практически без потери мощности и уменьшения перегрузочных характеристик мотора.
 В качестве элемента системы, автоматического изменения скорости вращения, вентиляционных устройств частотный регулятор обеспечивает контроль функционирования всего вытяжного механизма. При этом в процессе использования устройства для регулировки оборотов любых, в том числе и асинхронных двигателей, появляются дополнительные шумы, которые можно устранить, только используя трансформаторный регулятор.
В качестве элемента системы, автоматического изменения скорости вращения, вентиляционных устройств частотный регулятор обеспечивает контроль функционирования всего вытяжного механизма. При этом в процессе использования устройства для регулировки оборотов любых, в том числе и асинхронных двигателей, появляются дополнительные шумы, которые можно устранить, только используя трансформаторный регулятор.
Также кроме шума во время работы электродвигателя на разных скоростях могут появиться электромагнитные помехи, устранить которые можно за счёт экранированного кабеля. При использовании трёхфазного регулятора с шумом проблем не возникает, но обязательна дополнительная установка сглаживающих фильтров. Но вне зависимости от модели используемого регулятора существуют рекомендации по их эксплуатации.
В настоящее время всё чаще используют частотные регуляторы, так как они имеют компактные размеры и невысокую стоимость по сравнению с трансформаторными аналогами. При этом во время работы такие устройства подают номинальное напряжение на электромотор.
Оцените статью: Поделитесь с друзьями!elektro.guru

Текущая версия устройства трехфазного инвертора (далее инвертор) представляет собой усовершенствованный и модифицированный вариант системы управления двигателями, основанный на предыдущих подобных разработках кафедры Машин и аппаратов Хмельницкого национального университета. Внешний вид платы инвертора изображен на рисунке 1 и 2.
-> Украинская версия <-

Рисунок 1. Внешний вид платы трехфазного инвертора (верхний слой)

Рисунок 2. Внешний вид платы трехфазного инвертора (нижний слой)
Данный инвертор предназначен для осуществления управления работой электрическими двигателями, такими как:
Трехфазные асинхронные двигатели;
Однофазные асинхронные двигатели;
Коллекторные двигатели;
В зависимости от типа двигателя используется различные режимы управления, для чего предназначено соответствующие программное обеспечение. Для двигателей, содержащие одну или две фазы используется два плеча драйвера из трех – режим инверсного Н-моста. Всего возможно подключение двигателей, электрическая обмотка которых содержит от одного до трех фаз. Исключение составляют двухфазные (биполярные) шаговые двигатели, электрическая схема управления которых содержит две независимые обмотки. Управление таким двигателем предполагает наличие драйвера, который давал бы возможность осуществлять переполюсовку тока в каждой из этих обмоток.
Устройство данного инвертора представляет собой комплектующую часть для нужной конечной системы управления, которая, кроме текущей платы, должна включать в себя источник питания и систему управления с интерфейсом ввода-вывода данных. В качестве системы управления и интерфейса ввода-вывода может служить компьютер, для подключения которого на плате инвертора предусмотрен разъем интерфейса RS-232.
Возможен также работа платы инвертора в режиме демонстрации, с выполнением некоторых основных функций, например, запуск двигателя, остановка, реверс, изменение скорости. Для осуществления управления этим режимом на плате инвертора предусмотрены четыре кнопки управления.
Также к дополнительным функциям платы инвертора относятся следующие, – это возможность подключения датчиков обратной связи, например, для управления трехфазными двигателями постоянного тока с датчиками Холла, возможность подключения тахометра для контроля скорости вращения двигателя и возможность подключения охлаждающего вентилятора.
Печатная плата инвертора изготовлена в двухслойном исполнении с защитным покрытием (маской). На верхнем слое находится большинство электрических сигнальных проводников (рисунок 3) и запаяны почти все электрические компоненты (рисунок 4). На нижнем слое размещены в основном полигоны питания (рисунок 5) и запаянные силовые транзисторы для возможности удобного монтажа теплоотводящего радиатора (рисунок 6).

Рисунок 3. Верхний слой платы инвертора (электрические проводники)

Рисунок 4. Верхний слой платы инвертора (электрические компоненты)

Рисунок 5. Нижний слой платы инвертора (электрические проводники)

Рисунок 6. Нижний слой платы инвертора (электрические компоненты)
Всю систему данного инвертора можно разделить на следующие основные части (узлы):
Узел питания;
Узел контроля;
Узел ввода-вывода;
Узел мониторинга:
Рассмотрим кратко каждый из них. Узел питания состоит из четырех линейных стабилизаторов напряжения на 3.3В, 5.0В, 12.0В и 15.0В соответственно (Рисунок 7).

Рисунок 7. Узел питания инвертора
Стабилизатор напряжения на 3.3В используется для питания управляющего контроллера и всей логики схемы инвертора, на 5.0В – для питания датчика тока, на 12.0В – питание охлаждающего вентилятора и на 15.0В – питание для драйвера силовых ключей.
Узел контроля – это собственно программируемый контроллер (рисунок 8), выполняющий все функции ввода-вывода и управления самым драйвером двигателя. Для программирования последнего на плате предусмотрен специальный ISP разъем.

Рисунок 8. Узел контроля инвертора
Узел ввода-вывода включает в себя следующие элементы, такие как кнопки управления (рисунок 9), интерфейс RS232 (рисунок 10), светодиоды, логику управления вентилятором и тахометром, клеммы для подключения входных сигналов.

Рисунок 9. Узел ввода-вывода инвертора (кнопки управления)

Рисунок 10. Узел ввода-вывода (интерфейс RS232)
Узел мониторинга включает в себя датчик тока (рисунок 11) и температуры (рисунок 12). Первый и второй аналогового принципа действия, считывания и преобразования в значения тока и температуры выполняет контроллер с помощью интерфейсов АЦП.
Рисунок 11. Узел мониторинга инвертора (датчик тока)

Рисунок 12. Узел мониторинга инвертора (датчик температуры)
Узел драйвера включает в себя всю логику управления собственно двигателем. К ней относится гальваническая развязка (рисунок 13), драйвер силовых транзисторов (рисунок 14) и сами силовые транзисторы (рисунок 15).

Рисунок 13. Узел драйвера инвертора (гальваническая развязка)

Рисунок 14. Узел драйвера инвертора (драйвер силовых транзисторов)

Рисунок 15. Узел драйвера инвертора (силовые транзисторы)
Для питания всей схемы инвертора нужно три независимых (гальванически развязаны ) источника питания.
Первое – питание всей логики схемы управления, не включая драйвер силовых транзисторов. Последний источник должен быть с выходным напряжением в рекомендованном диапазоне 17-20В, ток потребления схемы инвертора по текущему питанию не более 40 мА.
Второе – питание драйвера силовых транзисторов, должно быть с выходным напряжением в рекомендованном диапазоне 17-20В, ток потребления схемы инвертора по текущему питанию не более 10 мА.
Третье – питание для собственно двигателя, которым нужно управлять. Напряжение и ток, которые должны быть обеспечены текущим источником зависят от мощности двигателя. В электрической схеме инвертора заложены силовые IGBT транзисторы, обеспечивающие максимальное падение напряжения между коллектором и эмиттером – 600В, и длительный ток коллектора при комнатной температуре – 60А .
Программа разработана для текущего контроллера инвертора предусматривает возможность выбора типа двигателя, которым нужно управлять с помощью директив следующих компиляции.
//#define MOTOR_STEP_3PH //#define MOTOR_VENT_3PH_HALL //#define MOTOR_DC //#define MOTOR_STEP_3PH_N #define MOTOR_AC_3PH //#define MOTOR_AC_1PH
//#define MOTOR_STEP_3PH
//#define MOTOR_VENT_3PH_HALL
//#define MOTOR_DC
//#define MOTOR_STEP_3PH_N
#define MOTOR_AC_3PH
//#define MOTOR_AC_1PH |
В зависимости от выбранной директивы компилятор настраивает программу под определенный тип двигателя, удаляя ненужные или вставляя нужные функции и отдельные части программы. Согласно контроллер платы инвертора сразу прошивается для управления соответствующим типом двигателя. Чтобы изменить программу управления для работы в другой системе с другим типом двигателя требуется следующее перепрограммирования инвертора.
На рисунке 16 показан внешний вид компьютерной программы, которая была разработана для управления работой асинхронными двигателями.

Рисунок 16. Внешний вид компьютерной программы управления асинхронными двигателями
Данная программа позволяет осуществлять демонстрацию управления асинхронным двигателем с задачей частоты синусоиды, которую генерирует драйвер, частоту самого ШИМ сигнала, включать / выключать защиту по превышению допустимого тока и температуры с задачей критических значений и периода считывания, время разгона / торможения и направление вращения. Также можно передавать отдельные независимые команды с задачей количества байт для возможности тестирования программы контроллера, считывать ток и температуру с датчиков.
На момент написания текущей статьи разработана система инвертора ни была применена в составе конечной системы управления или стенда.
Текущая электрическая плата инвертора предназначена для управления трехфазными асинхронными двигателями в системе открытого исполнения с целью исследования частотных и потребляемых характеристик двигателя в лабораториях Хмельницкого национального университета. Для таких исследований используется отдельная система с АЦП устройством под контролем среды программирования Lab View от компании National Instruments.
Автор: Сергей Корсун, ХНУ (2010 г. вып.), г. Хмельницк.
fpga.in.ua
 » Электирика
» Электирика
 Регуляторы скорости, запуск и торможение двигателей
Регуляторы скорости, запуск и торможение двигателейЭта статья будет посвящена двигателям - возможности регулировки скорости вращения, запускам и торможению.

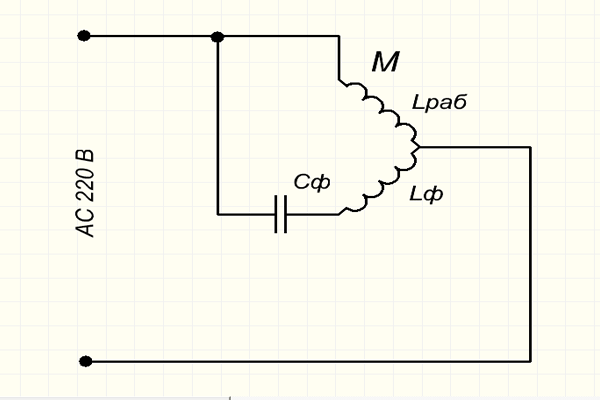
Однофазные конденсаторные электродвигатели отличаются от однофазных асинхронных электродвигателей с пусковой обмоткой и конденсаторным пуском тем, что рабочая и фазосдвигающая (конденсаторная) обмотки создают вращающееся магнитное поле как в момент пуска, так и при работе электродвигателя. Обе обмотки рассчитаны на длительный режим работы.
Одна из схем регулятора скорости для однофазного конденсаторного двигателя показана на рис.1.
Действие данного регулятора скорости вращения основано на зависимости скорости вращения от величины постоянного тока через фазосдвигающую (конденсаторную) обмотку. Выпрямленное диодом VD1 напряжение через резисторы R1, R2, R3 подается на фазосдвигающую обмотку.
Фазосдвигающий конденсатор служит одновременно для фильтрации выпрямленного напряжения, величину которого регулируют подстроечным резистором R1.
Минимальная скорость вращения зависит от надежного запуска двигателя и выставляется резистором R2. Для этого необходимо отключить двигатель, вывести резистор R1 в положение максимального сопротивления, а на место R2 временно установить переменный резистор на 2-3кОм. Желательно тоже вывести в максимальное положение. Включить в сеть и резистором R2 установить минимально возможные обороты. Далее выключить его на небольшое время и попытаться его запустить с выставленным таким способом сопротивлением R2. Если самостоятельного пуска не происходит - уменьшить еще немного сопротивление R2. Пробовать до тех пор, пока не произойдет самостоятельного надежного пуска. После этого можно измерть значение R2 и заменить его постоянным резистором. Если двигатель очень малой мощности, можно уменьшить значение R1.
Рекомендуемые детали : Резистор R1 типа ППЕ-3В или ППБ-15Е R1 и R2 - ПЭВ-7,5 VD1 - КД227Ж или с похожими параметрами С1 - штатный конденсатор данного двигателя.
* по материалам статьи В.Ф. Яковлева Регулятор скорости для однофазных конденсаторных двигателей
 Наиболее распространены следующие способы регулирования скорости асинхронного двигателя. изменение дополнительного сопротивления цепи ротора, изменение напряжения, подводимого к обмотке статора, двигателя изменение частоты питающего напряжения, а также переключение числа пар полюсов.
Наиболее распространены следующие способы регулирования скорости асинхронного двигателя. изменение дополнительного сопротивления цепи ротора, изменение напряжения, подводимого к обмотке статора, двигателя изменение частоты питающего напряжения, а также переключение числа пар полюсов.
Регулирование частоты вращения асинхронного двигателя путем введения резисторов в цепь ротора
Введение резисторов в цепь ротора приводит к увеличению потерь мощности и снижению частоты вращения ротора двигателя за счет увеличения скольжения, поскольку n = n о (1 - s).
Из рис. 1 следует, что при увеличении сопротивления в цепи ротора при том же моменте частота вращения вала двигателя уменьшается.
Жесткость механических характеристик значительно снижается с уменьшением частоты вращения, что ограничивает диапазон регулирования до (2 - 3). 1. Недостатком этого способа являются значительные потери энергии, которые пропорциональны скольжению. Такое регулирование возможно только для двигателя с фазным ротором.
 Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Изменение напряжения, подводимого к обмотке статора асинхронного двигателя. позволяет регулировать скорость с помощью относительно простых технических средств и схем управления. Для этого между сетью переменного тока со стандартным напряжением U 1ном и статором электродвигателя включается регулятор напряжения.
При регулировании частоты вращения асинхронного двигателя изменением напряжения, подводимого к обмотке статора, критический момент М кр асинхронного двигателя изменяется пропорционально квадрату подводимого к двигателю напряжения U рет (рис. 3 ), а скольжение от U рег не зависит.

Рис. 1. Механические характеристики асинхронного двигателя с фазным ротором при различных сопротивлениях резисторов, включенных в цепь ротора
Рис. 2. Схема регулирования скорости асинхронного двигателя путем изменения напряжения на статоре

Рис. 3. Механические характеристики асинхронного двигателя при изменении напряжения подводимого к обмоткам статора
Если момент сопротивления рабочей машины больше пускового момента электродвигателя (Мс Мпуск), то двигатель не будет вращаться, поэтому необходимо запустить его при номинальном напряжении Uном или на холостом ходу.
Регулировать частоту вращения короткозамкнутых асинхронных двигателей таким способом можно только при вентиляторном характере нагрузки. Кроме того, должны использоваться специальные электродвигатели с повышенным скольжением. Диапазон регулирования небольшой, до n кр.
Для изменения напряжения применяют трехфазные автотрансформаторы и тиристорные регуляторы напряжения.

Рис. 4. Схема замкнутой системы регулирования скорости тиристорный регулятор напряжения - асинхронный двигатель (ТРН - АД)
Замкнутая схема управления асинхронным двигателем. выполненным по схеме тиристорный регулятор напряжения - электродвигатель позволяет регулировать скорость асинхронного двигателя с повышенным скольжением (такие двигатели применяются в вентиляционных установках).
Регулирование частоты вращения асинхронного двигателя изменением частоты питающего напряжения
Так как частота вращения магнитного поля статора n о = 60 f /р, то регулирование частоты вращения асинхронного двигателя можно производить изменением частоты питающего напряжения.
 Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость n о магнитного поля статора.
Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость n о магнитного поля статора.
Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью.
Для получения высоких энергетических показателей асинхронных двигателей (коэффициентов мощности, полезного действия, перегрузочной способности) необходимо одновременно с частотой изменять и подводимое напряжение. Закон изменения напряжения зависит от характера момента нагрузки Мс. При постоянном моменте нагрузки напряжение на статоре должно регулироваться пропорционально частоте.
Схема частотного электропривода приведена на рис. 5, а механические характеристики АД при частотном регулировании — на рис. 6.
Рис. 5. Схема частотного электропривода
Рис. 6. Механические характеристики асинхронного двигателя при частотном регулировании
С уменьшением частоты f критический момент несколько уменьшается в области малых частот вращения. Это объясняется возрастанием влияния активного сопротивления обмотки статора при одновременном снижении частоты и напряжения.
Частотное регулирование скорости асинхронного двигателя позволяет изменять частоту вращения в диапазоне (20 - 30). 1. Частотный способ является наиболее перспективным для регулирования асинхронного двигателя с короткозамкнутым ротором. Потери мощности при таком регулировании невелики, поскольку минимальны потери скольжения.
 Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока.
Силовой трехфазный импульсный инвертор содержит шесть транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя.
В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями. Регулирование выходной частоты I вых и выходного напряжения осуществляется за счет высокочастотной широтно-импульсной модуляции.
Регулирование частоты вращения асинхронного двигателя переключение числа пар полюсов
Ступенчатое регулирование скорости можно осуществить, используя специальные многоскоростные асинхронные двигатели с короткозамкнутым ротором.
Из выражения n о = 60 f /р следует, что при изменении числа пар полюсов р получаются механические характеристики с разной частотой вращения n о магнитного поля статора. Так как значение р определяется целыми числами, то переход от одной характеристики к другой в процессе регулирования носит ступенчатый характер.
Существует два способа изменения числа пар полюсов. В первом случае в пазы статора укладывают две обмотки с разным числом полюсов. При изменении скорости к сети подключается одна из обмоток. Во втором случае обмотку каждой фазы составляют из двух частей, которые соединяют параллельно или последовательно. При этом число пар полюсов изменяется в два раза.
Рис. 7. Схемы переключения обмоток асинхронного двигателя: а - с одинарной звезды на двойную б - с треугольника на двойную звезду
Регулирование скорости путем изменения числа пар полюсов экономично, а механические характеристики сохраняют жесткость. Недостатком этого способа является ступенчатый характер изменения частоты вращения асинхронного двигателя с короткозамкнутым ротором. Выпускаются двухскоростные двигатели с числом полюсов 4/2, 8/4, 12/6. Четырехскоростной электродвигатель с полюсами 12/8/6/4 имеет две переключаемые обмотки.
Использованы материалы книги Дайнеко В.А. Ковалинский А.И. Электрооборудование сельскохозяйственных предприятий.
Почти все станки в качестве электропривода оснащаются асинхронными двигателями. У них простая конструкция и не высокая стоимость. В связи с этим важным оказывается регулирование скорости асинхронного двигателя. Однако в стандартной схеме включения управлять его оборотами можно только с помощью механических передаточных систем (редукторы, шкивы), что не всегда удобно. Электрическое управление оборотами ротора имеет больше преимуществ, хотя оно и усложняет схему подключения асинхронного двигателя.
Для некоторых узлов автоматического оборудования подходит именно электрическое регулирование скорости вращения вала асинхронного электродвигателя. Только так можно добиться плавной и точной настройки рабочих режимов. Существует несколько способов управления частотой вращения путём манипуляций с частотой, напряжением и формой тока. Все они показаны на схеме.
Из представленных на рисунке способов, самыми распространёнными для регулирования скорости вращения ротора являются изменение следующих параметров:
Последние два способа позволяют изменять скорость вращения без значительного снижения КПД и потери мощности, остальные способы регулировки способствуют снижению КПД пропорционально величине скольжения. Но и у тех и других есть свои преимущества и недостатки. Поскольку чаще всего на производстве применяются асинхронные двигатели с короткозамкнутым ротором, то все дальнейшие обсуждения будут касаться именно этого типа электродвигателей.
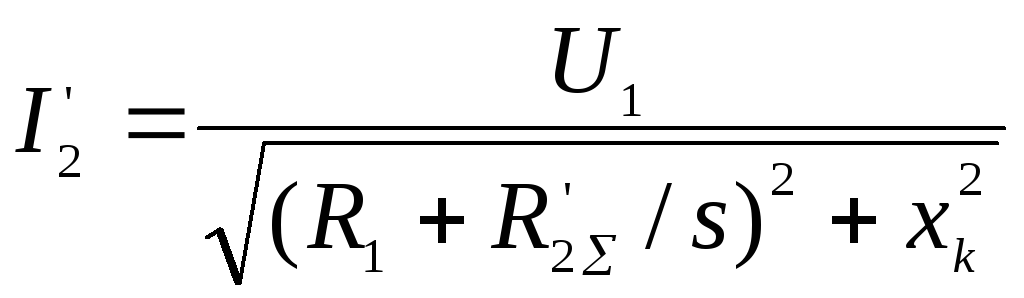
 Для частотного регулирования применяют в основном полупроводниковые преобразователи. Их принцип действия основан на особенности работы асинхронного двигателя, где частота вращения магнитного поля статора зависит от частоты напряжения питающей сети. Скорость вращения поля статора определяется по следующей формуле:
Для частотного регулирования применяют в основном полупроводниковые преобразователи. Их принцип действия основан на особенности работы асинхронного двигателя, где частота вращения магнитного поля статора зависит от частоты напряжения питающей сети. Скорость вращения поля статора определяется по следующей формуле:
n1 = 60f/p, где n1 частота вращения поля (об/мин), f-частота питающей сети (Гц), p-число пар полюсов статора, 60 коэффициент пересчета мерности.
Для эффективной работы асинхронного электродвигателя без потерь нужно вместе с частотой изменять и подаваемое напряжение. Напряжение должно меняться в зависимости от момента нагрузки. Если нагрузка постоянная, то напряжение изменяется пропорционально частоте.
Современные частотные регуляторы позволяют уменьшать и увеличивать обороты в широком диапазоне. Это обеспечило их широкое применение в оборудовании с управляемой протяжкой, например, в многоконтактных станках сварной сетки. В них скорость вращения асинхронного двигателя, приводящего в движение намоточный вал, регулируется полупроводниковым преобразователем. Такая регулировка позволяет оператору, следящему за правильностью выполнения технологических операций, ступенчато ускоряться или замедляться по мере настройки станка.
Остановимся на принципе работы преобразователя частоты более подробно. В его основе лежит принцип двойного преобразования. Состоит регулятор из выпрямителя, импульсного инвертора и системы управления. В выпрямителе синусоидальное напряжение преобразуется в постоянное и подаётся на инвертор. В составе силового трёхфазного импульсного инвертора есть шесть транзисторных переключателей. Через эти автоматические ключи постоянное напряжение подаётся на обмотки статора так, что в нужный момент на соответствующие обмотки поступает то прямой, то обратный ток со сдвигом фаз 120 . Таким образом, постоянное напряжение трансформируется в переменное трёхфазное напряжение нужной амплитуды и частоты.
Необходимые параметры задаются через модуль управления. Автоматическая регулировка работы ключей осуществляется по принципу широтно-импульсной модуляции. В качестве силовых переключателей используются мощные IGBT-транзисторы. Они, по сравнению с тиристорами, имеют высокую частоту переключения и выдают почти синусоидальный ток с минимальными искажениями. Не смотря на практичность таких устройств, их стоимость для двигателей средней и высокой мощности остаётся очень высокой.
 Регулировка скорости вращения асинхронного двигателя методом изменения числа пар полюсов также относится к наиболее распространённым методам управления электродвигателей с короткозамкнутым ротором. Такие моторы называются многоскоростными. Есть два способа осуществления этого метода:
Регулировка скорости вращения асинхронного двигателя методом изменения числа пар полюсов также относится к наиболее распространённым методам управления электродвигателей с короткозамкнутым ротором. Такие моторы называются многоскоростными. Есть два способа осуществления этого метода:
В первом случае чтобы уложить в пазы дополнительные обмотки нужно уменьшить сечение провода, а это приводит к уменьшению номинальной мощности электродвигателя. Во втором случае имеет место усложнение коммутационной аппаратуры, особенно для трёх и более скоростей, а также ухудшаются энергетические характеристики. Более подробно этот и другие способы регулирования скорости асинхронного двигателя описаны в архивном файле, который можно скачать внизу страницы.
Обычно многоскоростные двигатели выпускаются на 2, 3 или 4 скорости вращения, причем 2-х скоростные двигатели выпускаются с одной обмоткой на статоре и с переключением числа пар полюсов в отношении 2. 1 = р2. pt. 3-х скоростные двигатели — с двумя обмотками на статоре, из которых одна выполняется с переключением 2. 1 = Рг. Pi. 4-х скоростные двигатели — с двумя обмотками на статоре, каждая из которых выполняется с переключением числа пар полюсов в отношении 2:1. Многоскоростными электродвигателями оснащаются различные станки, грузовые и пассажирских лифты, они используются для приводов вентиляторов, насосов и т.д.
Источники: http://slavapril.narod.ru/upravlenie_dvig.html, http://electricalschool.info/spravochnik/maschiny/661-regulirovanie-skorosti-.html, http://ukrlot.com/regulirovanie_asinhronnogo_dvigatel.html
Комментариев пока нет!restart24.ru
Это устройство, предназначенное для выполнения функции плавного увеличения или уменьшения скорости вращения вала электрического двигателя. Регулировку можно осуществлять методом широтно-импульсной модуляции и методом изменения фазного напряжения.
Для управления и регулировки числа оборотов вращения электродвигателя асинхронного типа, можно использовать импульсный регулятор-стабилизатор напряжения (инвертор). Он будет выполнять функцию источника питания. В его основу положено применение импульсного ШИМ-регулятора марки ТL494. Питающее напряжение электродвигателя, выходящее после ШИМ-регулятора, будет изменяться в соответствии с изменением частоты вращения. Используя этот способ, достигается больший экономический эффект, устройство достаточно простое и при этом увеличивает эффективность регулирования.

На рисунке выше изображена схема использования ШИМ-регулятора для трехфазного асинхронного двигателя, подключенного через конденсатор к однофазной сети.
Этот способ, несмотря на свою эффективность, имеет два существенных недостатка – это:
Существует несколько видов блоков управления, изготовленных промышленным способом. Они используются для однофазных асинхронных двигателей, границы регулирования составляют от 25 до 100% от значения мощности, и от 1000 до 4000 об/мин. Это устройства с маркировкой РВС207, РВ600/900.
Работа блока регулировки происходит при изменении средней величины переменного напряжения на электродвигателе. Она производится с помощью метода фазового регулирования напряжения, при изменении угла открытия полупроводниковых приборов (тиристоров, симисторов и т. д.), при использовании которых осуществлена сборка схемы.
Управление блоком осуществляется посредством использования внешнего переменного резистора. В том случае, когда мощность менее 25%, двигатель отключается и переходит в дежурный режим ожидания.
Контроль за работой осуществляется при помощи светового индикатора. Отключенное состояние двигателя – изредка мигает красный цвет. Двигатель работает – скважность включения индикатора пропорциональна оборотам вращения (производительности) двигателя.

На рисунке схема подключения блока регулятора РВС 207.
Помимо образцов регуляторов, промышленных образцов регуляторов, существует возможность самостоятельного выполнения регуляторов скорости бесколлекторных двигателей, не уступающих промышленным образцам. За основу схемы берется пример регулятора промышленного производства, ее можно собрать своими силами.

На рисунке выше электрическая схема регулятора скорости вращения бесколлекторного двигателя.
Регулировать количество оборотов вращения вала бесколлекторного асинхронного электродвигателя допускается также при изменении значения переменного напряжения, подаваемого к двигателю.
В состав регулятора входит задающий генератор, он служит для изменения частоты в границах значений 50 – 200 Гц. Генератор состоит из мультивибратора, работа которого строится на микросхеме К561ЛА7 и счетчика-дешифратора марки К561ИЕ8 с коэффициентом пересчета – 8, она отвечает за формирование сигналов управления силовыми полевыми транзисторами полумоста.
В схеме присутствует выходной трансформатор Т-1. Он служит для развязки транзисторов полумоста.
Выпрямитель включает в свою конструкцию диодный мост и удваивающие напряжение питания – конденсаторы с большой емкостью.
Диодный мост подключен по нетрадиционной схеме. С4 и R7 выполняют роль демпфирующей цепи, она служит для сглаживания всплесков напряжения, которые представляют собой опасность для транзисторов VТ4.
Рекомендация: для трансформатора управления транзисторными ключами, можно применить трансформатор от телевизионного блока питания. В этом случае, тип не играет большого значения, главное, чтобы первичная обмотка состояла из 120 витков провода 0,7 мм2, вторичная представляет собой 2 независимые друг от друга обмотки с количеством витков – 60, провод, применяемый во вторичной обмотке, аналогичен проводу первичной. Первичная обмотка имеет напряжение 2 х 12 В, вторичная обмотка – по 12 В каждая.
Необходимо помнить, что обе вторичные обмотки должны обладать хорошей изоляцией друг от друга, между обмотками присутствует высокий потенциал, он составляет 640 В, они подключаются к затворам транзисторных ключей в противофазе.
Такой регулятор может управлять вращением асинхронного двигателя с максимальным значением рабочей мощности – 500 Вт. Чтобы регулятор использовать для регулировки электродвигателей более высокой мощности, нужно применить большее количество силовых ключей, а также изменить в сторону увеличения емкость конденсаторов для питающего фильтра, это элементы схемы С3 и С4. Для регулятора достаточно использовать печатную плату размером 110 х 80 мм. Управляющий силовыми транзисторными ключами трансформатор монтируется отдельно от блока регулятора.
Пишите комментарии, дополнения к статье, может я что-то пропустил. Загляните на карту сайта, буду рад, если вы найдете на моем сайте еще что-нибудь полезное. Всего доброго.
podvi.ru
Разное
Главная ![]() Радиолюбителю
Радиолюбителю ![]() Разное
Разное
Трёхфазные асинхронные двигатели находят широкое применение в промышленности и в быту благодаря своей простоте и надёжности. Отсутствие искрящего и греющегося коллекторнощёточного узла, а также простая конструкция ротора обуславливают долгий срок их эксплуатации, упрощают профилактику и обслуживание. Однако при необходимости регулировать частоту вращения вала такого двигателя возникают сложности. Для этого обычно применяют специальные преобразователи, называемые частотными регуляторами, изменяющие частоту питающего двигатель напряжения. Такие регуляторы нередко позволяют питать трёхфазный двигатель от однофазной сети, что особенно актуально при их применении в быту.
Частотным регуляторам посвящено довольно много статей, например, [1-3]. К сожалению, большинство описанных конструкций не очень подходят для повторения, поскольку они либо слишком сложны [1], либо (как регулятор, описанный в [2]) построены из дорогих деталей, стоимость которых достигает половины стоимости регулятора промышленного изготовления. Дополнительные функции регулятора [2] необходимы далеко не всегда. Поэтому для многих простых применений такой регулятор невыгоден. Устройство, описанное в [3], несложно по схеме, но организовать плавное регулирование частоты вращения с его помощью затруднительно.
Оптимальным для повторения можно считать устройство, описанное в [1], если его немного упростить. Оно построено на дешёвых широко распространённых микросхемах, поэтому нет нужды покупать дорогостоящие микроконтроллеры или специализированные модули. В описываемом в настоящей статье устройстве из [1] оставлен только формирователь импульсов управления. Остальное изменено с целью упрощения.
Как известно, при уменьшении частоты питающего двигатель напряжения необходимо пропорционально снижать и его амплитуду. Проще всего это делать с помощью широтно-импульсной модуляции формируемого напряжения. В [1] для этого использованы отдельный генератор и пять микросхем. Это не очень удобно, поскольку требует применять для управления двигателем сдвоенный переменный резистор и налаживать два генератора, да и число микросхем можно сократить.
Я использовал другой способ реализации широтно-импульсной модуляции, позволяющий упростить устройство и его налаживание. Теперь оно состоит из регулируемого по частоте генератора импульсов постоянной длительности, счётчика-делителя частоты следования импульсов генератора на три, формирователя импульсов управления и оптронов, управляющих силовыми ключами инвертора постоянного напряжения в трёхфазное переменное.
Формирователь импульсов управления делит частоту поступающих на него импульсов на шесть. Излучающие диоды оптронов включены так, что ток через них течёт только в отрезки времени, когда на выходе генератора установлен высокий логический уровень напряжения, а на соответствующем выходе формирователя импульсов управления - низкий. Поэтому каждый полу-период напряжения, подаваемого на обмотку двигателя, состоит из девяти импульсов постоянной длительности, но с регулируемыми паузами между ними. При этом снижение эффективного значения напряжения, подаваемого на обмотки, происходит автоматически по нужному закону за счёт увеличения скважности при понижении его частоты.
Принципиальная схема задающего генератора частотного регулятора, использующего такой принцип, изображена на рис. 1. Он разработан для системы питания осевого вентилятора с трёхфазным двигателем мощностью 0,37 кВт. На триггере Шмитта DD3.4 и транзисторе VT1 построен генератор импульсов. Рассмотрим его работу с момента, когда конденсатор C9 разряжен и на выходе триггера DD3.4 установлен высокий логический уровень, а на выходах параллельно соединённых триггеров DD3.5 и DD3.6 - низкий.

Рис. 1. Принципиальная схема задающего генератора частотного регулятора
Конденсатор C9 начинает заряжаться через резистор R12 и сопротивление сток-исток транзистора VT1, зависящее от напряжения на его затворе. В некоторый момент времени напряжение на конденсаторе превысит верхний порог переключения триггера, уровень на выходе которого станет низким. Далее начнётся разрядка конденсатора C9. После того как напряжение на конденсаторе достигнет нижнего порога переключения триггера, всё повторится сначала.
Длительность импульса низкого уровня на выходе триггера DD3.4 и высокого уровня на выходах триггеров DD3.5 и DD3.6 неизменна и определяется постоянной времени цепи C9R13. А продолжительность пауз между импульсами зависит от напряжения на затворе полевого транзистора VT1, которое устанавливают переменным резистором R3. Чем оно выше, тем меньше сопротивление сток-исток транзистора, следовательно, короче паузы между импульсами и выше частота их следования. При максимальной частоте паузы между импульсами минимальны, поэтому напряжение, подаваемое на обмотки двигателя, близко к напряжению силовых ключей.
При понижении частоты длительность пауз увеличивается, что ведёт к уменьшению среднего значения напряжения на обмотке двигателя.
Переменным резистором R3 и регулируют частоту вращения двигателя, а подстроечным резистором R4 устанавливают её минимальное значение. Резистор R12 определяет минимальную длительность пауз между импульсами.
Такой генератор сложнее, чем в [1], но применён по нескольким причинам. Во-первых, он позволяет получить широкий интервал регулирования частоты при небольшом сопротивлении переменного резистора R3. У большинства переменных резисторов при переходе подвижного контакта с металлического контакта на резистивное покрытие (или наоборот) происходит резкое изменение сопротивления. Причём, чем больше номинальное сопротивление резистора, тем ярче это свойство проявляется. А в обычном генераторе для получения широкого интервала регулирования требуются именно высокоомные переменные резисторы. На практике этот эффект проявляется как резкий рывок вала двигателя и бросок потребляемого им тока при приближении движка переменного резистора к крайнему положению.
Во-вторых, стало возможным реализовать плавный запуск двигателя без существенного усложнения устройства. Это актуально для вентиляторов, особенно центробежных, поскольку момент инерции рабочего колеса у них, как правило, довольно велик, что способствует длительной работе двигателя в пусковом режиме со значительным превышением номинального потребляемого тока.
В-третьих, благодаря тому что частотой генератора управляют изменением постоянного напряжения, при необходимости легко организовать дистанционное регулирование частоты вращения вала двигателя.
Для реализации плавного пуска служат элементы C2, R1, R2, VD1, а также реле K2. В момент включения питания цепь обмотки реле K2 разорвана, излучающие диоды оптронов U1-U6 отключены от генератора импульсов, конденсатор C2 разряжен. В этом состоянии подстроечным резистором R2 устанавливают минимальную частоту следования импульсов генератора, с которой начнётся запуск двигателя. Следует отметить, что минимальная частота зависит в некоторой степени и от положения движка переменного резистора R3.
При нажатии на кнопку SB1 "Пуск" реле K2 своими контактами K2.2 подключит оптроны к генератору. Конденсатор C2 начнёт заряжаться в основном через резистор R2. Напряжение на затворе транзистора, а следовательно, и частота генератора плавно увеличиваются. Подбирая ёмкость конденсатора C2, можно изменять скорость разгона двигателя. Когда частота генератора достигнет значения, установленного переменным резистором R3, диод VD1 закроется. Конденсатор C2, заряжаясь до напряжения питания через резистор R2, на дальнейшую работу генератора не влияет.
При нажатии на кнопку SB2 "Стоп" реле K2 отключает оптроны, а контактами K2.1 разряжает конденсатор C2. Реле K1 управляет узел токовой защиты частотного регулятора. При перегрузке оно размыкает цепь питания обмотки реле K2. Для дополнительной защиты частотный регулятор подключён к сети через автоматический выключатель с током отключения 3 А.
Если плавный пуск и управление частотным регулятором с помощью кнопок не требуются, все элементы, находящиеся на схеме внутри штрих-пунктирной рамки, можно не устанавливать. Вместо участка сток-исток транзистора VT1 следует включить по схеме реостата переменный резистор сопротивлением 100 кОм. Ёмкость конденсатора C9 лучше увеличить до 470 нФ, а сопротивление резисторов R12 и R13 выбрать соответственно200 Ом и 1,6 кОм. Аноды излучающих диодов оптронов U1-U6 следует соединить с выходами триггеров DD3.5 и DD3.6 напрямую.
С выхода триггера DD3.4 импульсы поступают на вход счётчика DD4, коэффициент деления которого установлен равным трём. Формирователь импульсов управления построен на счётчике DD1, элементах 3ИЛИ-НЕ микросхемы DD2 и триггерах Шмитта DD3.1-DD3.3. Его работа достаточно подробно описана в [1] и [2].
Работу узла управления поясняют временные диаграммы сигналов в некоторых его точках, показанные на рис. 2. В качестве выходных сигналов фазы А показаны токи, протекающие через излучающие диоды оптронов U1 и U4. Поскольку, в отличие от [1], в рассматриваемом устройстве все процессы синхронизированы с частотой генератора, так называемое мёртвое время At между открытыми состояниями разных силовых ключей, равное по длительности паузе между импульсами генератора, обеспечивается автоматически. При указанных на схеме номиналах резистора R12 и конденсатора C9 и максимальной частоте импульсов её длительность - не менее 30 мкс.

Рис. 2. Временные диаграммы сигналов
Полевой транзистор КП501А можно заменить на BSN304 или серии КП505. Вместо микросхемы 74НСТ14 лучше установить один из её функциональных аналогов КР1554ТЛ2, 74АС14, отличающихся повышенной нагрузочной способностью. Применять здесь микросхемы серии К561, а тем более К176 не следует.
Литература
1. Нарыжный В. Источник питания трёхфазного электродвигателя от однофазной сети с регулировкой частоты вращения. - Радио, 2003, № 12, с. 35-37.
2. Галичанин А. Система частотного управления асинхронным двигателем. - Радио, 2016, № 6, с. 35-41.
3. Хиценко В. Три фазы из одной. - Радио, 2015, № 9, с. 42, 43.
Автор: Е. Герасимов, станица Выселки Краснодарского края
Дата публикации: 17.05.2017
Мнения читателейВы можете оставить свой комментарий, мнение или вопрос по приведенному вышематериалу:
www.radioradar.net