Секретные материалы
 Тема эта очень интересная по ней очень много всяких устройств и она очень противоречива. Познакомившись с работой Мандельштама и Папалекси о параметрическом резонансе, стал глубже вникать в эту проблему. Хотя резонанс последовательный и параллельный мной изучен досконально, так как по образованию электронщик, обнаружил много интересного.Хотя никаких больших тайн в явлении резонанса ранее не замечал, все же все время было ощущение, что что-то не договорено и непонятно.
Тема эта очень интересная по ней очень много всяких устройств и она очень противоречива. Познакомившись с работой Мандельштама и Папалекси о параметрическом резонансе, стал глубже вникать в эту проблему. Хотя резонанс последовательный и параллельный мной изучен досконально, так как по образованию электронщик, обнаружил много интересного.Хотя никаких больших тайн в явлении резонанса ранее не замечал, все же все время было ощущение, что что-то не договорено и непонятно.
Первый вопрос, который все время крутился - система введенная в резонанс, способна отдавать излишек, связанный с добротностью колебательной системы? Вот тут изрядно напаявшись всяких устройств, осенила мысль, все бросить и найти теоретическое нормальное объяснение резонансным явлениям, а если путь верный, то и другим не менее загадочным фактам. Формулировка для резонанса дает понять, на что способен тот или иной принцип резонанса.
Параллельный резонанс, образованный индуктивностью и емкостью это замкнутая система, в которой все параметры фиксированы, и энергия в системе замкнута, попытка прямым путем снять излишки колебательного процесса приведет к затуханию колебаний. Поняв, наконец, это, стал исследовать последовательный - пришел к тому же выводу.
Поговорив с друзьями, опытными электронщиками, посвятившими жизнь электроприводу, услышал от них много интересного.…Как развивался электропривод, в каких годах произошло изменение в направлении конструкции электропривода, и с чем это было связанно. Появилось много моментов подсказки, то есть, до 80-х годов асинхронные двигатели имели массивный ротор, очень большой инерционный момент и беличья клетка была прямой, что, при пуске, придавало жесткость. Где-то в восьмидесятых привод стал, коренным образом, манятся, связанно это с бурным ростом машиностроения, потребовались компактные мощные двигатели с мягкими параметрами пуска и быстрой остановкой. Роторы таких машин стали делать длинными, чтобы уменьшить выбег двигателя после остановки для мягкости характеристики пуска применили скошенную магнитную систему ротора. Это расследование натолкнуло на мысль проверить правильность одной возникшей мысли. Набрав общим счетом 27 асинхронных двигателей, разных годов и параметров принялся их разбирать и пересчитывать число полюсов ротора и статора. А также искать массивный ротор без скоса роторных полюсов. Из 27 двигателей попался только один очень старой конструкции, на нем только удалось рассмотреть, что он 7,5 кВт, обороты путем замера оказались почти 3000об/мин. Сопротивление обмоток 1,3 Ом, число полюсов статора 36, ротора 34 (индуктивность не меряю принципиально - с расчетом резонанс не сходится). Единственный недостаток этого двигателя, все-таки скошенные магнитные полюса ротора. Запускаю двигатель по схеме ротовертера или классической, с фазосдвигающим конденсатором. Рабочую емкость настраиваю в резонанс. Напряжение подбираю рабочим конденсатором до 380 вольт. Останавливаю, от мощного звукового генератора по всем правилам снятия АЧХ, снимаю характеристику, и резонанс приходится на частоту выше 120 герц. Вынимаю ротор частота еще герц на двадцать выше. Если при снятии АЧХ произвести подстройку конденсаторами на 50 герц и включить, то он довольно быстро сгорит. Если запитать через латр, постепенно снижая напряжение, то он будет вращаться даже при 30 вольтах. Но на синусе резонансных обмоток, на вершине синуса, есть прогиб осциллограммы, один в один как у феррорезонансных стабилизаторов. Это убедило меня в том, что резонансные обмотки с рабочим конденсатором не работают на основной частоте, а только настраиваются на гармонику кратную ей. Возникает закономерный вопрос - а что собственно интересного, нового в моем повествовании. А всего то искал условие возникновения параметрического резонанса.
Так какое соотношение искать в асинхронных двигателях? Первое, что удалось понять, что рассматривать в работе двигателя нужно всего две обмотки, которые работают в резонансе. Третья применяется для нагрузок потребителей.
Разгонять можно двигатель любым способом. По достижению им номинальных оборотов, одна обмотка путем переключения должна быть электрически отсоединена.

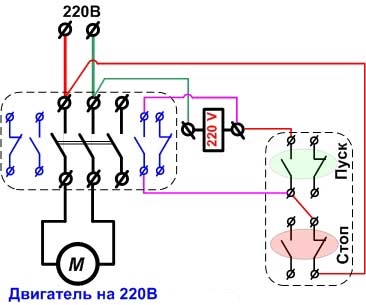
Применял для разгона классическую схему - соединение звездой, две обмотки в резонансе через фазосдвигающую емкость. После достижения оборотов, нужно на ходу быстро перекинуть выводы одной обмотки местами.
Двигатель еще не отсоединен от сети, до переключения обмоток, резонансное напряжение должно быть подобрано не ниже 380 вольт. После перекидки полярности, двигатель не меняя внешне ничего, продолжает также работать, но замер резонанса показывает, что напряжение упало почти до 170 вольт.

Подобрав емкость нужно вернуть первоначальное напряжение, то есть 380 вольт, емкость увеличится, примерно в три-четыре раза. Вот тут и начинается весь фокус - если инерционная масса достаточна, конденсаторы имеют хорошую добротность малую утечку. Надо позаботиться о наличие маховика, возможно, поняв все нюансы, можно от него избавиться, но на начальном этапе лучше перестраховаться, чтоб выбег был с массой несколько десятков минут. В своей конструкций использовал пилораму. Установил на ней отрезные круги большого размера 4-5 штук, стянув их планшайбой. Даже без эффекта крутится очень долго!…
Если обмотка двигателя качественная, обладает хорошей добротностью, правильно выбрано соотношение статорных и роторных полюсов, то двигатель переходит в режим параметрической генерации, на синусоидальной обмотке возникает плоскость, точно такая, как у феррорезонансных стабилизаторов. И можно смело отсоединять от сети, если все параметры двигателя удачны он, как бы чуть на слух ускоряется, и продолжает работать, при этом незначительно греется. Можно потихоньку пробовать нагружать.
Конденсаторы,для резонанса,нужно набирать из небольших - по 2 мкФ. Их несколько суток желательно продержать в тепле, после зарядить от источника вольт на 220 и оставить, на другой день вольтметром с высокоомным входом промерять и выбрать удерживающие максимально большое напряжение. Провода для спайки конденсаторов и подводу к двигателю лучше сделать из самодельного литцендрата. Литцендрат применяю очень давно, когда еще занимался звукотехникой у него очень низкое волновое сопротивление. При передаче импульсных сигналов, повышении добротности колебательных систем, выполняю, не задумываясь, для меня это правило. Но можно и простым медным проводом, но желательно толстым 2,5- 3 мм .
Литцендрат можно набрать из провода марки ПЭЛ – 0,2 жилок 8-12. Все же, самое главное, это сам двигатель мне так и не удалось найти такой, какой именно вытекает из теоретических рассуждений, все современные двигатели имеют косые полюса на роторе маленький диаметр, а нужно большого диаметра ротор и прямые магнитные полюса.
Такие двигатели сданы давно на металлолом. C соотношение, двух роторных полюсов, сдвинутых на сто двадцать градусов, относительно статора, должно выполняться строго.

Если верхний полностью совмещен, то левый полюс только собирается входить в статорный полюс. Это обмотки, работающие в резонансе, правая обмотка для нагрузки и ее положение не имеет значения.
Эта схема имеет очень интересные свойства для исследований. Преимущества ее, что она почти в полной мере использует резонанс, питаясь от сети всего через одну обмотку. Две обмотки с резонансной емкостью также вырабатывают магнитный поток, участвующий в работе. Это позволяет снять повышенную механическую мощность. Мной переделаны все станки на этот режим токарный, фрезерный, сверлильный, наждак, циркулярка, все прекрасно работает от однофазной сети. Собираюсь переделать компрессор. Все оборудование как бы работает на полную мощность и ощущение, что от трехфазной сети. В схеме применяются для пуска электролиты в неполярном включении, а рабочая обмотка, настроенная в резонанс с конденсатором типа МБГЧ с допустимым напряжением не менее 600 В.
Автор: неизвестен
Другие материалы по теме: Резонансный усилитель мощности тока промышленной частотыПАРАМЕТРИЧЕСКОЕ ГЕНЕРИРОВАНИЕ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ.Сергей Зацаринин
allpowr.su
Работа асинхронного двигателя в резонансном режиме.
Ниже представлена статья работы асинхронного двигателя в резонансном режиме. Автор статьи неизвестен, найдено на сайте www.realstrannik.ru в формате .txt. Корректировка текста моя.
Попробовал резонансом запитать асинхронный движок и ведь заработал!
Потребление электроэнергии снизилось в 1.83 раза!
Работать как бы и должен, а если нагрузить?
И нагружал, и нет, все полностью подтверждается. Характеристика под нагрузкой полностью совпадает с характеристикой питания от сети. Сегодня уже двум фомам неверующим показывал у себя на работе. А вообще-то целую статью уже написать можно, только не поверят же пока не увидят, а самим сделать видать лень. Самое интересное -что с помощью программы SW CAD III экспериментальные данные полностью совпали с симуляцией на этой программе (тютелька в тютельку). двигатель 154 Вт (внутреннее R=173 Ом) имел на обмотке 220 вольт и 0.72 А как и положено по паспорту. А запитан был через конденсатор (набор С) 11.66 мкФ - последовательный резонанс Источник выдавал 120 вольт , 0.72 А (84 Вт).
Да активное сопротивление можно было и не приводить, питание ведь - переменный ток. А как вы сами объясняете возможный эффект? Ни в каких резонансных цепях нет ничего подобного, двигатель в данной ситуации можно рассматривать как обычную индуктивность, номинал которой, к тому же, меняется от нагрузки на валу. Это, кстати, противоречит тому, что двигатель будет находиться в резонансе при переменной нагрузке.
Правильно индуктивность меняется, но добротность контура не высокая и запаса хватает с лихвой. Если бы частоты были выше, тогда пришлось бы подстраивать емкость под нагрузку каждый раз. Почему я указал сопротивление обмотки - потому что если бы сопротивление было ниже, я бы мог получить и больший выигрыш. Это подтверждает и симулятор.
Двигатель Испанский (Барселона) фирма «CAFO» Tipo VE-25
220/240 V 0.72 A 50 Hz RPM 1350.
Внутри четыре обмотки через 90 градусов. В общем обычный однофазный без конденсаторный двигатель используется на вентиляторе в общем второй, который попался под руку.
Первый который пробовал запитать был российский ДВН-8 220в 1965 г «ЯэмК» СТУ14/03-138-64 от настольного вентилятора. Очень старенький такой весь железный. Две обмотки последовательно.
Характеристики его:
Питанеи 220 вольт.
Внутреннее сопротивление R=362 Ом.
Индуктивность обмоток L=1.556 Гн.
При питании 220 вольт, потреблял 143 мА, вращая вентилятор.
При питании 170 вольт, потреблял 104 мА.
Расчетная емкость, при 50 Гц, С=6.51 мкФ.
Дальше схема собиралась как последовательный контур, запитанный от латра (не знаю нужно ли схему рисовать ведь проще некуда – двигатель последовательно с конденсатором на выход латра). Контроль напряжения и тока на выходе латра и контроль напряжения и тока непосредственно на двигателе (даже не обязательно мерить ток в последовательной цепи он и так один и тот же). И даже с таким дерьмовеньким движком получил на выходе латра:
Питание 168 вольт ток 143 мА.
А на двигателе питание 220 вольт потребляемый ток 143 мА.
Потребление от сети P1=24.024 Вт.
Мощность на двигателе P2=31.46 Вт.
P2/ P1 = 1.3 или выигрыш в 30 %.
Лучше на данном двигателе не получить т.к. велико внутреннее сопротивление обмоток
(подтверждается программой SW CAD III).
Ну, так вернёмся ко второму движку:
Замеры на двигателе: R=173 Ом
Индуктивность обмоток L=0.220 Гн
При питании 220 вольт потреблял 720 мА вращая вентилятор - проверено.
Расчетная емкость, при 50 Гц, С=46.055 мкФ.
Спаял длинную цепочку конденсаторов. И собрал последовательную цепь как описано выше.
Получил 220 вольт 720 мА на двигателе при потреблении 165 вольт 720 мА от сети.
Но дальше стал экспериментировать с конденсаторами убавляя и добавляя. И получил куда более лучшие результаты на второй гармонике резонанса:
При С=11.66 мкФ.
При тех же параметрах на двигателе питание осуществлялось от 120 вольт 720 мА.
Посчитайте выигрыш 83%.
Спрашивали, что показывает осциллограф на двигателе – ПРАКТИЧЕСКИ РОВНУЮ СИНУСОИДУ (никаких гармоник и всплесков), ТО ЖЕ САМОЕ НА ЛАТРЕ. По-моему всплески могли бы быть при питании от импульсного блока питания (вентильное управление).
На сайте www.linear.com в апреле 2004г. в разделе Software появилась новая версия программы SwCAD III. Несложная и считает быстрее в сравнении с ORCADом или Micro СAPом. Неплохая библиотека моделей. Один недостаток. Нельзя напрямую добавлять модели новых элементов. Нужно потрудится.
http://www.linear.com/software/ LTspice/SwitcherCAD III (4MB) Apr 13, 2004.
А насчет параллельного соединения - есть такая штука, конденсаторный компенсатор (применяется при мощности двигателя до десятков киловатт). Обычный АД потребляет не только активную, но и реактивную мощность. Для того что бы ни гонять по проводам этот самый реактивный балласт, прямо около станка ставят этот самый конденсаторный компенсатор. Последний как раз и представляет батарею конденсаторов, включенных параллельно обмоткам двигателей. И что характерно - никакого резонанса! А если бы он и был, то движок (в идеальном случае постоянства оборотов, внешних магнитных полей и настроения тёщи) просто перестал бы давать полезную мощность (идеальный параллельный LC контур в резонансе ведет себя как разрыв цепи).
Вот потому и сделал параллельное включение. Давление тоже, а потребление в два раза меньше. И это при том, что как индуктивность он хреновый. 11000 витков тонким проводом. Сопротивление и все такое. А что касается конденсаторов, то их ставят возле генераторов, вырабатывающих энергию для нас с вами. Именно по причине реактивных токов. Чтобы они не гуляли туда-сюда и не разнесли генератор. Получается, что параллельный колебательный контур заложен в саму систему РАО ЕЭС. Только вот счетчик учета стоит не снаружи контура, а внутри, заставляя нас оплачивать не только потребленную нами энергию индукции, но и отдаваемую им обратно энергию самоиндукции...
Господа я просто собрал схему, как писалось в статье. Никаких научных выкладок не делал, и делать не собираюсь - мне надо просто на просто меньше платить за электричество. Работает и ладно. Пусть теоретики теории создают.
Похоже, что вас взбудоражило - то что собрать такую простую схему просто поленились.
Вопросами просто завалили. Попробую ответить.
В обратной последовательности.
1. L гуляет в нормальных (определенных) пределах и ширины полосы пропускания контура вполне хватает. В конце концов, подбираешь емкость под свою конкретную нагрузку. Когда вентилятор держу за лопасть (двигатель стоит-всё равно коэффициент 1.3 в большую сторону и безопасней для движка ток уменьшается до 0.6 А, а напряжение на латре 120 вольт, а на движке 150 вольт).
2. Еще раз повторяю для непонятливых - двигатель нагружен на лопасти вентилятора (работает не в холостую). Т.Е. Рассчитанная номинальная нагрузка. А перегружать нельзя любой движок. Посмотрите характеристики асинхронников.
3.Насчет параллельного колебательного контура - МОЖНО но только если питаться не от сети, а от отдельного генератора с ВЫСОКИМ ВНУТРЕННИМ СОПРОТИВЛЕНИЕМ! Иначе не будет у вас резонанса в параллельном контуре.!
4. Про КПД я не писал. Только про разные показания (выигрыш).
001-lab.at.ua
Изобретение относится к вибрационной технике и может быть использовано в различных отраслях промышленности. Технический результат заключается в возбуждении и поддержании резонансных колебаний рабочего органа вибрационной машины, возбуждаемых дебалансным инерционным вибровозбудителем с приводом от асинхронного электродвигателя, при изменении параметров механической системы вибрационной машины за счет управления частотой питающего напряжения. Способ возбуждения и поддержания резонансных механических колебаний заключается в том, что на рабочий орган вибрационной машины воздействуют периодической возмущающей силой, которая возникает при вращении дебаланса инерционного вибровозбудителя с приводом от асинхронного электродвигателя, частоту вращения дебаланса изменяют за счет изменения частоты питающего напряжения в зависимости от величины сдвига фаз между колебаниями рабочего органа и периодической возмущающей силой, при этом определение величины сдвига фаз проводят по сигналам с датчика углового положения дебалансов и датчика колебаний рабочего органа. 1 ил.
Изобретение относится к вибрационной технике и может быть использовано в различных отраслях промышленности.
Известны способы резонансной настройкой вибромашин, основанные на поддержании угла сдвига между фазой перемещения рабочего органа вибрационной машины (далее - вибромашина) и фазой вынуждающей силы близким к π/2 за счет введения системы автоматического управления (САУ) с обратной связью [1]. Структура такой системы состоит из двух основных частей: узла учета отклонения регулируемого параметра и узла учета фазы. В состав узла учета отклонения регулируемого параметра входят задатчики минимальной и максимальной амплитуд. Недостатком этих способов является то, что в них предлагается импульсная САУ, которая поддерживает работу вибромашины только вне зоны нечувствительности, а также требуется задание значения минимальной и максимальной амплитуд, которые в действительности заранее неизвестны. Также в этих способах не указано, в какой момент времени начинается поиск резонансного режима, что может привести к застреванию асинхронного двигателя в пусковой зоне. Недостатком также является использование реле в структуре САУ, которые обладают сравнительно невысоким быстродействием и ограниченным ресурсом.
Известен способ возбуждения резонансных колебаний механических систем синхронным электродвигателем, авторское свидетельство СССР 1609515, В06В 1/16, заключающийся в подаче на электродвигатель электрического напряжения, в измерении колебаний механической системы, осуществлении сдвига фазы измеренного сигнала, его усилении и подаче на электродвигатель, при этом одновременно подают напряжение на фазную обмотку и обмотку возбуждения электродвигателя, изменяют амплитуду напряжения, подаваемого на обмотки, поворачивают статор до обеспечения условия возбуждения резонансных колебаний.
Данный способ имеет ограниченные возможности для практического использования в силу высокой сложности, а также по причине использования синхронного электродвигателя, который значительно уступает асинхронному электродвигателю по объемам применения.
Известен способ поддержания резонансных колебаний механической системы синхронным электродвигателем, авторское свидетельство СССР 1726055, В06В 1/16, заключающийся в подаче напряжения одновременно на фазную обмотку и обмотку возбуждения электродвигателя, измерении колебаний механической системы, осуществлении сдвига фаз измеренного сигнала, усилении его и подаче на электродвигатель, при этом изменяют амплитуду напряжения, подаваемого на электродвигатель, и поворачивают статор до обеспечения условий возбуждения резонансных колебаний, при измерении колебаний определяют ускорение колебаний механической системы, осуществляют сдвиг фазы измеренного сигнала на π/2, изменяют амплитуду напряжения, подаваемого на фазную обмотку, и поворачивают статор до совпадения движущего момента с моментом нагрузки, а на обмотку возбуждения подают постоянное напряжение.
Данный способ имеет те же недостатки, которые были указаны для предыдущего аналога.
Известен способ получения и поддержания резонансных механических колебаний, патент РФ 2335352, В06В 1/14, заключающийся в том, что на рабочий орган вибрационной установки воздействуют возмущающей периодической силой, угловые частоты возмущающей периодической силы и собственных колебаний рабочего органа в колебательной системе настраивают в режим резонансных колебаний, причем возмущающую периодическую силу передают рабочему органу через основную упругую связь, в качестве возмущающей периодической силы применяют возмущающую периодическую силу инерции, рабочий орган подвешивают в пространстве на виброизолирующей упругой связи с основанием, резонансные колебания рабочего органа возбуждают на основной упругой связи относительно источника возмущающей периодической силы инерции, при этом угловую частоту резонансных колебаний рабочего органа определяют по формуле:

где ω - угловая частота резонансных колебаний рабочего органа, рад/с;
С - жесткость основной упругой связи, Н/м;
m - масса рабочего органа, кг,
изменяют угловую частоту возмущающей периодической силы инерции в области частот восходящей части резонансной кривой и настраивают амплитуду колебаний рабочего органа, заданную по технологии, для осуществления которой используется вибрационная установка, измеряют колебания рабочего органа, сигнал измерения колебаний обрабатывают, сравнивают с опорным сигналом, задающим амплитуду колебаний рабочего органа, полученный сигнал ошибки используют в качестве сигнала, управляющего угловой частотой возмущающей периодической силы инерции.
Недостатками данного способа являются: сложность применения при значительных изменениях массы рабочего органа вследствие изменения массы технологической нагрузки, так как требуется заранее знать массу рабочего органа для определения резонансной частоты системы и формирования опорного сигнала, притом что масса может изменяться произвольным образом, а также невозможность оценки резонансной частоты в системах с нелинейными характеристиками восстанавливающей силы, которые проявляются при значительных перемещениях рабочего органа.
Известно, что резонансный режим соответствует максимуму амплитуды амплитудно-частотной характеристики механической системы и сдвигу фаз между ее перемещениями и возбуждающей силой, равному π/2 [1-3]. Обычно резонансная настройка оценивается по максимальному значению амплитуды колебаний. Однако данный способ не обеспечивает устойчивость резонансного режима, особенно в случаях изменения параметров системы, например при изменении технологической нагрузки в вибрационных транспортно-технологических машинах, наличия нелинейностей механических характеристик системы, например, при значительных перемещениях упругих элементов, ограниченной мощности вибровозбудителя [1-3]. Использование фазовых соотношений между перемещением рабочего органа вибромашины и возмущающей силой позволяет достичь устойчивой настройки вибромашины на резонансный режим. Однако в зависимости от нагрузки в асинхронных двигателях частота вращения дебалансов отличается от частоты вращения магнитного поля и, соответственно, от частоты питающего напряжения. Для автоматической резонансной настройки требуется учет динамических свойств механической системы вибромашины с приводом от асинхронного электродвигателя на основе связи между частотой питающего напряжения, частотой вращения ротора, определяемой динамической характеристикой вибромашины, и сдвигом фазы между колебаниями рабочего органа и возмущающей силой.
Целью предлагаемого изобретения является автоматическая настройка на резонансный режим колебаний рабочего органа вибромашины, возбуждаемых дебалансным инерционным вибровозбудителем с приводом от асинхронного двигателя, при изменении параметров механической системы вибромашины в широких пределах за счет управления частотой питающего напряжения.
Указанная цель достигается тем, что в предлагаемом способе возбуждения и поддержания резонансных колебаний на рабочий орган вибромашины воздействуют периодической возмущающей силой, которая возникает при вращении дебаланса инерционного вибровозбудителя с асинхронным двигателем, частоту вращения дебаланса регулируют за счет изменения частоты питающего напряжения с учетом различия между этими частотами в зависимости от величины сдвига фаз между колебаниями рабочего органа вибрационной машины и периодической возмущающей силой, которая определяется угловым положением дебаланса, при этом измерение величины сдвига фаз проводят по сигналам с датчика углового положения дебаланса и датчика колебаний рабочего органа. Необходимое изменение частоты питающего напряжения определяют в зависимости от параметров механической системы вибромашины и электродвигателя, частоты питающего напряжения, токов в обмотках электродвигателя, частоты вращения ротора и сдвига фазы между колебаниями рабочего органа и возмущающей силой. В дополнение к измерению колебаний рабочего органа вибромашины, измеряют угловое положение дебаланса, что позволяет определить сдвиг фаз между колебаниями рабочего органа вибромашины и возмущающей силой, определяют отличие сдвига фазы от сдвига фазы, соответствующего резонансному режиму, в зависимости от которого изменяют частоту вращения дебаланса. Причем при определении сдвига фаз между колебаниями рабочего органа и угловым положением дебаланса определяют рассогласование полученного сдвига фаз от π/2 при измерении перемещения, или от π при измерении скорости, или от 3π/2 при измерении ускорения, при этом изменяют частоту вращения дебаланса в зависимости от величины рассогласования сдвига фаз, сводя ее к нулю, а изменение частоты вращения определяют по наперед заданному алгоритму, который связывает сдвиг фазы, частоты питающего напряжения и частоту вращения дебаланса в зависимости от механических и электрических параметров вибромашины и электродвигателя. Это позволяет достичь устойчивой резонансной настройки и может применяться для вибромашин с нелинейными механическими характеристиками их элементов и вибромашин с вибровозбудителем с ограниченной мощностью.
Способ возбуждения и поддержания резонансных колебаний механических систем осуществляют следующим образом.
Колебания рабочего органа вибромашины возбуждают периодической силой, которая возникает при вращении дебаланса инерционного вибровозбудителя. Измеряют колебания рабочего органа вибромашины датчиком колебаний, например виброметром, велосиметром или акселерометром. Измеряют угловое положение дебаланса с помощью датчика углового положения дебаланса, например многооборотного абсолютного энкодера. Сигналы с датчиков поступают в блок управления, в котором определяют момент времени t* выхода вибромашины на установившийся режим, когда относительная разность измеряемых двух последовательных размахов колебаний не превышает наперед заданной величины, которая определяется заданной точностью регулирования и не должна превышать 5%. Для упрощения САУ выход на установившийся режим может быть задан временем установления в 5-20 с.
В момент времени t больше t*, при котором платформа оказывается в положении статического равновесия, а скорость колебаний рабочего органа оказывается больше нуля, определяют сдвиг фазы е по угловому положению дебаланса. Определяют рассогласование между измеренным сдвигом фазы и сдвигом фазы, соответствующим резонансному режиму колебаний, равным π/2 при измерении виброперемещения, π - при измерении виброскорости, 3π/2 - при измерении виброускорения колебаний механической системы. В зависимости от величины рассогласования сдвига фаз изменяют частоту вращения дебаланса, сводя величину рассогласования к нулю. При этом изменение частоты вращения определяют в блоке управления по наперед заданному алгоритму, который связывает сдвиг фазы, частоту питающего напряжения и частоту вращения дебалансов в зависимости от механических и электрических параметров вибромашины и электродвигателя.
На фиг.1 представлена схема вибромашины, в которой может быть реализован предлагаемый способ.
Указанный способ автоматической настройки резонансных режимов колебаний вибрационной машины с приводом от асинхронного двигателя может быть реализован следующим образом (фиг. 1). Механическая система вибромашины состоит из рабочего органа вибромашины 3, связанного с основанием 4 посредством упругих элементов 5 и диссипативных элементов 6. Для возбуждения колебаний используется инерционный вибровозбудитель, выполненный в виде электродвигателя 1 с дебалансом 2, закрепленным на его оси. Электродвигатель 1 жестко закреплен на рабочем органе вибромашины 3. Устройство также содержит систему управления с обратной связью, включающую: устройство для управления (УУ), например частотный преобразователь, частотой вращения электродвигателя 7, датчик колебаний - виброметр 8, установленный на рабочем органе вибромашины 3; датчик углового положения дебаланса 9, установленный на оси электродвигателя 1; блок управления (БУ) 10, входы которого соединены с датчиком колебаний 8 и датчиком углового положения ротора электродвигателя 9, а выход соединен с устройством для управления частотой вращения электродвигателя 7, при этом блок управления выполнен с возможностью обработки сигналов с датчиков колебаний 8 и углового положения дебаланса 9 и формирования сигнала управления частотой вращения электродвигателя.
Электродвигатель подсоединяют к внешнему источнику электрического тока через устройство управления 7. Ротор электродвигателя начинает вращаться, возбуждая колебания рабочего органа вибромашины.
При вращении ротора электродвигателя 1 и колебаниях рабочего органа вибромашины 3 сигналы с датчиков колебаний 8 и углового положения дебаланса 9 поступают на блок управления 10, в котором проводится периодическое измерение и обработка этих сигналов, в результате которой определяются частота колебаний и перемещения рабочего органа вибромашины, частота вращения ротора, сдвиг фазы между колебаниями рабочего органа вибромашины и направлением периодической возмущающей силой, которое определяется угловым положением дебаланса. Проводится проверка условия выхода системы на установившийся режим колебаний, который определяется величиной изменения измеренных размахов колебаний на текущем и предыдущем шагах измерения или заданием времени установления колебаний.
При достижении установившегося режима колебаний устанавливается рассогласование величины измеренного сдвига фазы с величиной сдвига фазы, соответствующей резонансному режиму колебаний, который должен быть равен π/2. Полученное рассогласование сдвига фаз обрабатывается, и формируется управляющий сигнал на устройство управления частотой вращения электродвигателя, что приводит к изменению частоты вращения электродвигателя и, соответственно, частоты колебаний рабочего органа вибромашины. Благодаря обратной связи обеспечивается автоматическая настройка и поддержание резонансных колебаний рабочего органа вибрационной машины независимо от величины изменения ее параметров.
Литература
1. Вибрации в технике: справочник. В 6 т. Т. 4. Вибрационные процессы и машины / Под ред. Э.Э. Лавендела. - М.: Машиностроение, 1981. - 509 с., стр. 460-467.
2. Быховский И.И. Основы теории вибрационной техники. - М.: Машиностроение, - 1968. - 361 с.
3. Кононенко В.О. Колебательные системы с ограниченным возбуждением. - М.: Наука, - 1964. - 256 с.
Способ автоматической настройки резонансных режимов колебаний вибрационной машины с приводом от асинхронного двигателя, заключающийся в том, что колебания рабочего органа вибрационной машины возбуждают периодической силой за счет вращения дебаланса инерционного вибровозбудителя с приводом от асинхронного двигателя, отличающийся тем, что частоту вращения дебаланса настраивают на резонансный режим колебаний механической системы вибрационной машины, для чего измеряют либо перемещение, либо скорость, либо ускорение колебаний рабочего органа относительно его исходного неподвижного положения с одновременным измерением углового положения дебаланса относительно его исходного положения в нижней мертвой точке, определяют сдвиг фаз между колебаниями рабочего органа вибрационной машины и угловым положением дебаланса, определяют рассогласование полученного сдвига фаз от π/2 при измерении перемещения, или от π при измерении скорости, или от 3π/2 при измерении ускорения, изменяют частоту вращения дебаланса в зависимости от величины рассогласования сдвига фаз, сводя ее к нулю, при этом изменение частоты вращения определяют по наперед заданному алгоритму, который связывает сдвиг фазы, частоту питающего напряжения и частоту вращения дебалансов в зависимости от механических и электрических параметров вибрационной машины или двигателя.
www.findpatent.ru