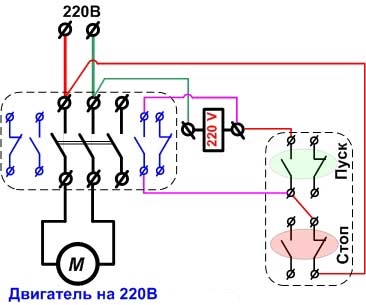
Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения 220 В.
Наиболее распространённая конструкция таких двигателей содержит две (или более) обмотки - рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.


Регулировать скорость вращения таких двигателей необходимо, например, для:
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность.
Способы регулирования
Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем. Также не затронем способ изменения количества полюсов обмоток.
Рассмотрим способы с изменением электрических параметров:
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя - разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
S=(n1-n2)/n2
n1 - скорость вращения магнитного поля
n2 - скорость вращения ротора
При этом обязательно выделяется энергия скольжения - из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз - то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформатор - это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.

На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
 Преимущества данной схемы:
Преимущества данной схемы:
 Недостатки:
Недостатки:


В данной схеме используются ключи - два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.

Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно "отрезается" кусок вначале или, реже в конце волны напряжения.
Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки - ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования - пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно - шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
Достоинства тиристорных регуляторов:
Недостатки:


Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.
Как называет его сам производитель - электронный автотрансформатор или ШИМ-регулятор.

Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы - полевые или биполярные с изолированным затвором (IGBT).

Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.

Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же как и у частотного преобразователя, только для одной фазы - диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора:
Слабые стороны:
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого. Причина - не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие - массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование - основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей - INVERTEK DRIVES.
Это модель Optidrive E2

Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
Xc=1/2πfC
f - частота тока
С - ёмкость конденсатора
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:

Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя - в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
Минусы использования однофазного ПЧ:

Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:

Геометрическое расположение обмоток друг относительно друга в статоре асинхронного двигателя составляет 90°:

Фазовый сдвиг трёхфазного напряжения -120°, как следствие этого - магнитное поле будет не круговое , а пульсирующее и его уровень будет меньше чем при питании со сдвигом в 90°.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление.
При работе без конденсатора это приведёт к:
Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна
Преимущества:
Недостатки метода:
masterxoloda.ru
Устройство (система) управления электродвигателем (контроллер двигателя) - устройство или группа устройств, которые предназначены для управления электродвигателем.
Устройство управления электродвигателем может включать ручные или автоматические средства для запуска и остановки двигателя, средства выбора прямого или обратного направления вращения, выбора и регулирования скорости вращения, регулирования или ограничения момента, защиту от перегрузки и от неисправности.
Каждый электродвигатель должен иметь своего рода систему управления (контроллер). Система управления электродвигателем в зависимости от задачи будет иметь различные характеристики и сложность.
Простейшим случаем управления электродвигателем является выключатель который соединяет электродвигатель с источником энергии, например как в небольших бытовых приборах или электроинструменте (дрели и др.). Переключение может осуществляться вручную, с помощью реле или контактора подсоединенного к датчику для автоматического запуска или остановки электродвигателя. Переключатель может иметь несколько положений для выбора различных способов подключения электродвигателя, что может позволить уменьшить пусковое напряжение, выбирать направление и скорость вращения.
Более сложные системы управления электродвигателями могут использоваться для точного управления скорости и момента электродвигателя, могут быть частью системы для точного управления угловым положением управляемого механизма.
Устройства управления электродвигателями могут управляться вручную, удаленно или автоматически. Они могут иметь, как только функции старта и остановки двигателя, так и многие другие функции.
Устройства управления двигателями можно классифицировать по типам управляемых электродвигателей (таких как СДПМ, КДПТ и др.) или по назначению.
Устройства с помощью которых электродвигатель напрямую подключается к источнику питания. Самый простой способ подключения. Небольшие электродвигатели некоторых типов могут быть включены: напрямую в розетку, с использованием выключателя, через автоматический выключатель. Такой способ подключения мгновенно соединяет электродвигатель с сетью питания.
engineering-solutions.ru
Плавная работа двигателя, без рывков и скачков мощности – это залог его долговечности. Для контроля этих показателей используется регулятор оборотов электродвигателя на 220В, 12 В и 24 В, все эти частотники можно изготовить своими руками или купить уже готовый агрегат.
Регулятор оборотов двигателя, частотный преобразователь – это прибор на мощном транзисторе, который необходим для того, чтобы инвертировать напряжение, а также обеспечить плавную остановку и пуск асинхронного двигателя при помощи ШИМ. ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
 Фото — мощный регулятор для асинхронного двигателя
Фото — мощный регулятор для асинхронного двигателяСамый простой пример преобразователя – это обычный стабилизатор напряжения. Но у обсуждаемого прибора гораздо больший спектр работы и мощность.
Частотные преобразователи используются в любом устройстве, которое питается от электрической энергии. Регуляторы обеспечивают чрезвычайно точный электрический моторный контроль, так что скорость двигателя можно изменять в меньшую или большую сторону, поддерживать обороты на нужном уровне и защищать приборы от резких оборотов. При этом электродвигателем используется только энергия, необходимая для работы, вместо того, чтобы запускать его на полной мощности.
 Фото — регулятор оборотов двигателя постоянного тока
Фото — регулятор оборотов двигателя постоянного токаЗачем нужен регулятор оборотов асинхронного электродвигателя:
Устройство часто используется для сварочного аппарата (в основном для полуавтоматов), электрической печки, ряда бытовых приборов (пылесоса, швейной машинки, радио, стиральной машины), домашнего отопителя, различных судомоделей и т.д.
 Фото — шим контроллер оборотов
Фото — шим контроллер оборотовРегулятор оборотов представляет собой устройство, состоящее из следующих трех основных подсистем:
Когда двигатель переменного тока запускается на полную мощность, происходит передача тока с полной мощностью нагрузки, такое повторяется 7-8 раз. Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя. Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.
 Фото — схема регулятора для коллекторного двигателя
Фото — схема регулятора для коллекторного двигателяВ зависимости от входящего напряжения, частотный регулятор числа оборотов трехфазного или однофазного электродвигателя, происходит выпрямление тока 220 или 380 вольт. Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии. Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
 Фото — синусоида нормальной работы электродвигателя
Фото — синусоида нормальной работы электродвигателяСуществует несколько характеристик, по которым нужно выбирать регулятор оборотов для автомобиля, станочного электродвигателя, бытовых нужд:
Хорошо себя зарекомендовали приборы марки Sinus, E-Sky и Pic.
При этом также нужно понимать, что есть так называемый универсальный регулятор вращения. Это частотный преобразователь для бесколлекторных двигателей.
 Фото — схема регулятора для бесколлекторных двигателей
Фото — схема регулятора для бесколлекторных двигателейВ данной схеме есть две части – одна логическая, где на микросхеме расположен микроконтроллер, а вторая – силовая. В основном такая электрическая схема используется для мощного электрического двигателя.
Видео: регулятор оборотов электродвигателя с ШИро V2
Можно сделать простой симисторный регулятор оборотов электродвигателя, его схема представлена ниже, а цена состоит только из деталей, продающихся в любом магазине электротехники.
Для работы нам понадобится мощный симистор типа BT138-600, её советует журнал радиотехники.
 Фото — схема регулятора оборотов своими руками
Фото — схема регулятора оборотов своими рукамиВ описанной схеме, обороты будут регулироваться при помощи потенциометра P1. Параметром P1 определяется фаза входящего импульсного сигнала, который в свою очередь открывает симистор. Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Принцип работы прост: в момент, когда двигатель немного затормаживается, его индуктивность падает, и это увеличивает напряжение в R2-P1 и C3, то в свою очередь влечет более продолжительное открытие симистора.
Тиристорный регулятор с обратной связью работает немного по-другому. Он обеспечивает обратный ход энергии в энергетическую систему, что является очень экономным и выгодным. Данный электронный прибор подразумевает включение в электрическую схемы мощного тиристора. Его схема выглядит вот так:

Здесь для подачи постоянного тока и выпрямления требуется генератор управляющего сигнала, усилитель, тиристор, цепь стабилизации оборотов.
www.asutpp.ru
С все более увеличивающимся ростом автоматизации в бытовой сфере появляется необходимость в современных системах и устройствах управления электродвигателями.
Управление и преобразование частоты в небольших по мощности однофазных асинхронных двигателях, запускаемых в работу с помощью конденсаторов, позволяет экономить электроэнергию и активирует режим энергосбережения на новом, прогрессивном уровне.
В основе работы асинхронного двигателя лежит взаимодействие вращающегося магнитного поля статора и токов, наводимых им в роторе двигателя. При разности частоты вращения пульсирующих магнитных полей возникает вращающий момент. Именно этим принципом руководствуются при регулировании скорости вращения асинхронного двигателя с помощью частотного преобразователя.
Электродвигатель по факту может считаться двухфазным, но у него только одна рабочая обмотка статора, вторая, расположенная относительно главной под углом в 90о является пусковой.
Пусковая обмотка занимает в конструкции статора 1/3 пазов, на главную обмотку приходится 23 паза статора.
Ротор однофазного двигателя коротко замкнутый, помещенный в неподвижное магнитное поле статора, начинает вращаться.

Рис.№1 Схематический рисунок двигателя, демонстрирующий принцип работы однофазного асинхронного двигателя.
Кондиционеры воздуха, холодильные компрессоры, электрические вентиляторы, обдувочные агрегаты, водяные, дренажные и фекальные насосы, моечные машины используют в своей конструкции асинхронный трехфазный двигатель.
Все типы частотников преобразуют переменное сетевое напряжение в постоянное напряжение. Служат для формирования однофазного напряжения с регулируемой частотой и заданной амплитудой для управления вращения асинхронных двигателей.
Существует несколько способов регулирования скорости вращения однофазного двигателя.

Рис.№2. Схема регулировки с помощью автотрансформатора.
Достоинства схемы – напряжение выхода имеет чистую синусоиду. Способность трансформатора к перегрузкам имеет большой запас по мощности.
Недостатки – автотрансформатор имеет большие габаритные размеры.
Использование тиристорного регулятора оборотов двигателя. Применяются тиристорные ключи, подключенные встречно-параллельно.

Рис. №3.Схема тиристорного регулирования однофазного асинхронного электродвигателя.
При использовании для регулирования скорости вращения однофазных асинхронных двигателей, чтобы избежать негативного влияния индукционной нагрузки производят модификацию схемы. Добавляют LRC-цепи для защиты силовых ключей, для корректировки волны напряжения используют конденсатор, минимальная мощность двигателя ограничивается, так гарантируется старт двигателя. Тиристор должен иметь ток выше тока электродвигателя.
В схеме используется широтно-импульсная модуляция (ШИМ) с применением выходного каскада, построенного на использовании полевых или биполярных IGBT транзисторах.

Рис. №4. Схема использования ШИМ для регулирования однофазного асинхронного электродвигателя.
Частотное регулирование асинхронного однофазного электродвигателя считается основным способом регулирования частоты электродвигателя, мощности, эффективности использования, скорости и показателей энергосбережения.

Рис. №5. Схема управления электродвигателем без исключения из конструкции конденсатора.
Частотный преобразователь разрешает своему владельцу снизить энергопотребление и автоматизировать процессы в управлении оборудованием и производством.
Основные компоненты частотного преобразователя: выпрямитель, конденсатор, IGBT-транзисторы, собранные в выходной каскад.
Благодаря способности управлением параметрами выходной частоты и напряжения достигается хороший энергосберегающий эффект. Энергосбережение выражается в следующем:
Уменьшая частоту до 40Гц, уменьшается величина напряжения до 250В, означает, что уменьшается количество оборотов вращения насоса и потребление энергии снижается в 2,56 раз.

Рис. №6. Использование частотного преобразователя Speedrive для регулирования насосных агрегатов по систем CKEA MULTI 35.
Для повышения энергетической эффективности использования частотного преобразователя в управлении электродвигателем необходимо сделать следующее:
Компактное устройство преобразования частоты служит для управления однофазными электродвигателями для оборудования бытового предназначения. Большинство частотных преобразователей обладает следующими конструктивными возможностями:

Рис.№7. Современный преобразователь Optidrive с основными функциональными особенностями.
Важно: Однофазный преобразователь частоты, питаясь от однофазной сети напряжением 220В, выдает три линейных напряжения, величина каждого из них по 220В. То есть, линейное напряжение между 2 фазами находится в прямой зависимости от величины выходного напряжения самого частотника.
Частотный преобразователь не служит для двойного преобразования напряжения, благодаря наличию в конструкции ШИМ-регулятора, он может поднять величину напряжения не более чем на 10%.
Главная задача однофазного преобразователя частоты – обеспечить питание как одно- так и трехфазного электродвигателя. В этом случае ток двигателя будет соответствовать параметрам подключения от трехфазной сети, и оставаться постоянным
Первое на что обращаем внимание при выборе частотника для своего оборудования – это соответствие сетевого напряжения и номинального значения тока нагрузки, на который рассчитан двигатель. Способ подключения выбирается относительно рабочего тока.
Главным в схеме подключения является наличие фазосдвигающего конденсатора, он служит для сдвига напряжения, поступающего на пусковую обмотку. Она служит для пускового включения двигателя, иногда после того, как двигатель заработал, пусковая обмотка вместе с конденсатором отключается, иногда остается включенной.
Выходное линейное напряжение устройства на каждой фазе равно выходному напряжению частотника, то есть на выходе будет три напряжения линии, каждое по 220В. Для запуска может использоваться только пусковая обмотка.

Рис. №8. Схема присоединения однофазного асинхронного двигателя через конденсатор
Фазосдвигающий конденсатор не может обеспечить равномерный фазовый сдвиг в пределах границ частот инвертора. Частотник обеспечит равномерный сдвиг фаз. Для того, чтобы исключить из схемы конденсатор, нужно:

Рис. №9. Схема подключения однофазного асинхронного двигателя без использования конденсатора.
На видео — Частотный преобразователь. Подключение трехфазного двигателя в однофазную сеть 220В.
chistotnik.ru
Основная задача блока управления бесколлекторным двигателем - переключать обмотки статора в зависимости от положения ротора.
В двигателе постоянного тока эту задачу выполняет коллектор - диск на роторе с контактными площадками, по которому скользят токопроводящие графитовые щетки и переключают обмотки.В асинхронном двигателе знать положение ротора не нужно, но для регулировки скорости нужно менять частоту переключения обмоток (или работать от сети со стандартной частотой 50Гц) Я начинал изучение схемотехники драйвера бесколлекторного двигателя по апноте Atmel "AVR492: Управление бесколлекторным электродвигателем постоянного тока с помощью AT90PWM3" Она есть на русском языке. Немного пояснений: "Для управления БКЭПТ используется силовой каскад, состоящих из 3 полумостов. Схема силового каскада показана на рисунке 4."Здесь силовой каскад - это 6 транзисторов, схематично показанных ключами CmdSW, полумост - пара транзисторов, соединенных последовательно между "+" и "-" питания, например CmdSW1, CmdSW2. A, B, C - выводы обмоток двигателя, соединение обмоток между собой как у асинхронных двигателей. Эта схема позволяет току протекать между фазами A, B, C в любом направлении. Например если замкнуть ключ CmdSW1 и CmdSW4, то ток потечет от вывода A к выводу B, а если замкнуть CmdSW3 и CmdSW2 - от вывода В к выводу A. А если замкнуть CmdSW1 и CmdSW2 - получится короткое замыкание с выгоранием транзисторов, так что управлять транзисторами нужно осторожно. Кстати для управления коллекторым двигателем с реверсом нужно 2 полумоста, без реверса - 1 транзистор. Для регулирования силы тока в фазе используют широтно-импульсную модуляцию (ШИМ). Например часть времени открывают ключи CmdSW1, CmdSW4 и ток начинает течь от "A" к "B", затем закрывают CmdSW1 и открывают CmdSW2 и за счет индуктивности обмоток ток продолжить течь по кольцу A-B-CmdSW4-"земля"-CmdSW2. Кстати в транзисторы встроены диоды, проводящие ток в обратном направлении. Так что если во второй фазе ШИМ разомкнуть все транзисторы, то в обмотке начнет расти напряжение и через эти диоды энергия из обмоток начнет возвращаться в сеть. Эта схема из 6 транзисторов называется трехфазным инвертором и применяется для преобразования постоянного тока в трехфазный переменный для питания как бесколлекторных, так и асинхронных двигателей. Для бесколлекторных двигателей применяются низковольтные полевые транзисторы (MOSFET), для асинхронных двигателей - высоковольтные биполярные транзисторы с изолированным затвором (IGBT). С помощью этой схемы можно осуществлять и рекуперацию. Её используют все и лучше не сделать.
Как инвертор бывает оформлен в зависимости от мощности двигателя:
Для управления двигателями очень маленькой мощности используются специализированные микросхемы, в которой уже находятся 6 транзисторов и логика для управления ими. Это решение для двигателей дисководов и вентиляторов. Следующий шаг - микросхема, управляющая транзисторами и транзисторы отдельно. И для высоких мощностей микросхема или контроллер управляет микросхемами драйверов транзисторов, а драйвера уже управляют самими транзисторами. Зачем такие сложности? Мощные транзисторы имеют управляющий вход с большей емкостью, слабая электроника не в состоянии обеспечить токи до нескольких ампер для быстрого их открытия. А у полуоткрытого транзистора большое сопротивление, он в этот момент греется или даже сгорает :) Поэтому используют микросхемы-драйверы, внутри которых кстати тоже транзисторы, только менее мощные. Получается такой каскад из транзисторов.
Вот первый пример реализации инвертора - авиамодельный, самый дешевый. Фото с двух сторон.
На одной стороне видно 6 транзисторов в корпусах SOIC. (3 N-канальных, 3 P-канальных), на другой стороне микроконтроллер ATMEGA8 и линейный стабилизатор для получения 5В питания. Ещё есть электролитический конденсатор и всякая мелочь - резисторы с конденсаторами. И всё. Дешево и сердито. Цена в рознице около 1000р. Микроконтроллер напрямую управляет затворами транзисторов. Греется такой контроллер довольно сильно, но так как он устанавливается на авиамодели, то хорошо обдувается. Разумеется есть более продвинутые модели, это просто пример упрощения и миниатюризации.
А вот фотография демо-платы от Atmel
Предполагается, что можно купить её и сразу начать программировать контроллер, пытаться крутить двигатель. Я решил не покупать, возможно зря. Во всяком случае к ней неплохо бы продавать сразу запасные транзисторы, я их сжег не один раз. И контроллер пару раз. Собственно 6 транзисторов справа, контроллер слева, драйвера транзисторов на другой стороне.
Схема моего драйвера с пояснениямиЯ решил не делать простейший драйвер с тем, чтобы расширить возможности его применения, при необходимости несложно будет упростить. Схема разбита на 3 части. Она не такая наглядная, как в апноте Atmel, но постараюсь всё пояснить.
Первая часть - силовая
Силовые транзисторы VT1-VT6 управляются микросхемами-драйверами DA1-DA3. Транзисторы я выбрал IRLR3705 как одни из наиболее мощных в корпусе D-Pak на напряжение 55V с сопротивлением 8мОм. Я рассчитывал на напряжение работы 36В плюс запас. В принципе можно ставить транзисторы на радиаторы и использовать корпуса TO-220, но я решил не усложнять монтаж и паять транзисторы на плату. В таком случае для меньших мощностей можно ставить транзисторы в корпусе soic, а для больших - в D2-Pak. Драйвера взял самые мощные из полумостовых от фирмы International Rectifier - irf2186s с током управления до 4A. Получился большой запас, но самые простые драйвера ir2101 из апнота атмел (ток 130/270мА) с мощными транзисторами справлялись плохо, разница в нагреве транзисторов была ощутима. Полумостовой драйвер управляет двумя транзисторами - верхним и нижним, для управления верхним транзистором нужно высокое напряжение, которое получается по бустрепной схеме питания с помощью диода и конденсатора (например C6, DD7), эта схема наиболее проста и принцип её можно легко найти в интернете. Можно было взять одну микросхему full-brige для управления сразу шестью транзисторами, но у меня разводка с ней получалась хуже. Между затворами транзисторов и драйверами - резисторы с диодом. Они ограничивают ток затвора, причем ток зарядки почти в 2 раза больше. Тут следующая логика - чем больше ток, тем меньше греются транзисторы при переключении, но растут всплески напряжения. Поэтому номинал резисторов нужно уменьшать до какого-либо разумного предела. Причем транзистор открывается медленнее, чем закрывается, поэтому ток зарядки я сделал больше. Сигнальные выводы драйверов подтянуты к земле на всякий случай, чтоб не сработали когда нет сигналов управления. В целом здесь всё почти так же, как в апноте атмел. Датчики холла также подключил как в апноте, здесь ничего интересного. Питание, силовые Выводы транзисторов и выводы датчиков холла выведены на клеммник X1. Для защиты от короткого замыкания нужно контролировать ток. Для этого служат резисторы R19, R21 суммарным сопротивлением 0,005Ом (в апноте был резистор 0,1Ом), падение напряжение на них усиливается микросхемой LM358 и идет на компаратор и АЦП контроллера. Реализация у меня получилась не очень удачной, но в большинстве случаев защита срабатывает. Неплохо было бы ставить переменный резистор, чтобы пользователь мог задавать порого срабатывания защиты, но это как-нибудь потом ). Также в контроллер заведен сигнал V_IN_MEAS, пропорцональный входному напряжению. Сделано это, чтобы не давать работать драйверу при входном напряжении более 36В, но защиту я пока не включил.
Следующая часть схемы - питание логических элементов.
Из входного питания 24..36В нужно получить 12В для питания драйверов транзисторов и 5В для остальной логики
Для получения 12В я использовал линейный стабилизатор MC78M12. Лишнее напряжение он просто рассеивает в виде тепла, но так как драйверы транзисторов поребляют не очень много нагрев приемлемый.Для 5В питания линейный стабилизатор уже применить не получилось, потому что 5В ещё задумывалось использовать для питания внешнего экрана индикации и нагрев оказался слишком большим. Поэтому применил понижающий преобразователь L5973AD. Он не очень дорогой, но в отличии от ещё более дешевых вариантов имеет защиту от короткого замыкания на выходе. Внешняя обвязка для него и разводка дорожек выполнена по соответствующей апноте.Обе эти микросхемы имеют максимально допустимое напряжение 35В. Для гашения возможного излишнего напряжения предназначена конструкция из транзисторов VT7, VT8 и стабилитрона VD3.
Последняя часть схемы - микроконтроллер AT90PWM3B с обвязкой.Представленная схемотехника конечно не соответствует первоначальной идее о максимально дешевом драйвере, но относительно легко может быть упрощена. Можно убрать интерфейс RS485, поставить менее мощные транзисторы и драйверы управления ими.
v-kudryashov.livejournal.com
 Контроллеры-оптимизаторы идеально подходят для обеспечения энергосбережения и отладки плавного пуска оборудования.
Контроллеры-оптимизаторы идеально подходят для обеспечения энергосбережения и отладки плавного пуска оборудования.Посмотреть модельный ряд...

 На сегодняшний день контроллеры-оптимизаторы повсеместно применяются для повышения КПД асинхронных двигателей.
На сегодняшний день контроллеры-оптимизаторы повсеместно применяются для повышения КПД асинхронных двигателей. Посмотреть прайс-лист...
 Устройство плавного пуска позволяет решить проблему «просадок» напряжения, снизить вероятность перегрева и повысить срок службы электродвигателей.
Устройство плавного пуска позволяет решить проблему «просадок» напряжения, снизить вероятность перегрева и повысить срок службы электродвигателей. Посмотреть варианты...
 Частотный преобразователь в комплекте с асинхронным электродвигателем поможет значительно сократить расходы на потребление электроэнергии.
Частотный преобразователь в комплекте с асинхронным электродвигателем поможет значительно сократить расходы на потребление электроэнергии. Перейти в каталог...

Электродвигатели обеспечивают преобразование электрической энергии в механическую и приводят в движение рабочий элемент технологического механизма. По принципу действия электрические машины подразделяются на синхронные, в которых частота вращения магнитного поля равна частоте вращения ротора, и асинхронные, в которых первый показатель превосходит второй. Для управления асинхронными электроприводами и оптимизации их работы используются частотные преобразователи, устройства плавного пуска, а также более современные и эффективные контроллеры-оптимизаторы, о которых мы поговорим ниже.
В настоящее время около 90% промышленных электроприводов в мире работают на базе асинхронных двигателей. Последние отличаются простотой изготовления, высокой надежностью, низкой стоимостью и минимальными эксплуатационными затратами.
На заметкуАсинхронная электрическая машина состоит из ротора (вращающейся части) и статора (неподвижной части). Эти элементы разделены воздушным зазором. Активными частями механизма являются сердечник и обмотки, а остальные элементы выполняют конструктивные функции.
Однако у асинхронных двигателей есть и ряд недостатков, в частности:
Для устранения этих недостатков в работе электрической машины были разработаны специальные электронные устройства.
Одним из способов решения проблемы является управление электроприводом на основе преобразователя однофазного или трехфазного электрического тока с частотой 50 Гц в ток с переменной частотой и необходимой амплитудой.
Модернизация электропривода частотным преобразователем позволяет уменьшить расход энергоресурсов, обеспечивает необходимый пусковой момент, плавный запуск двигателя, стабилизацию скорости вращения механизма при изменении нагрузки и высокую точность регулирования. Использование частотного преобразователя позволяет повысить ресурс оборудования. Но есть у такой системы управления электроприводом и недостатки, например, высокая стоимость и создание электромагнитных помех. Кроме того, частотное регулирование далеко не всегда применимо в условиях конкретных технологических процессов.
Для того чтобы сделать запуск и разгон двигателя плавными, используются устройства плавного пуска (УПП). Последние также позволяют уменьшить пусковой ток и снизить механическую нагрузку на привод в момент его запуска. Главное достоинство подобного устройства — ограничение скорости повышения пускового тока до необходимого значения в течение заданного отрезка времени.
Использование устройства плавного пуска, как и преобразователя частоты, предусматривает применение дополнительного оборудования, в частности, автоматических выключателей, выбранных по типу и номиналу с учетом рекомендаций производителя.
Обычные УПП могут применяться только для управления электроприводом с небольшой нагрузкой на валу, так как уменьшение начального напряжения влечет за собой снижение пускового момента. В отсутствие мониторинга нагрузки это нередко приводит к тому, что механический момент, развитый электродвигателем, может оказаться меньше тормозящего момента нагрузки. Запуск электродвигателя в этом случае не произойдет.
Максимальное энергосбережение при эксплуатации приводов, не нуждающихся в изменении числа оборотов двигателя, обеспечивает контроллер «ЭнерджиСейвер» (устройство плавного пуска с функцией энергосбережения (коррекции коэффициента мощности)). Это оборудование представляет собой регулятор напряжения питания электродвигателя, обеспечивающий полный контроль двигателя при его запуске и работе. Кроме того, контроллер-оптимизатор защищает привод от повышенного и пониженного напряжения, перегрузки, обрыва фаз или нарушения их чередования.
Контроллеры «ЭнерджиСейвер» оснащены следящими цепями, благодаря которым они регистрируют изменения нагрузки в каждый конкретный момент времени. Это позволяет контроллерам осуществлять запуск электроприводов, характеризующихся тяжелыми и очень тяжелыми пусковыми режимами «номинал в номинал», чего не в состоянии обеспечить обычные УПП.
«ЭнерджиСейвер» измеряет фазовый сдвиг между напряжением и током и согласует механический момент, развиваемый электродвигателем, с механическим моментом нагрузки на валу путем повышения или понижения напряжения на клеммах электродвигателя. Это изделие является функционально законченным, а соответственно, не требует подключения дополнительного оборудования. К его основным достоинствам можно отнести и относительно невысокую стоимость.
Контроллер-оптимизатор асинхронных электрических двигателей «ЭнерджиСейвер» позволяет экономить электроэнергию, которая потребляется двигателем при работе на пониженных нагрузках. Данное оборудование используется в тех случаях, когда отсутствует необходимость в изменении скорости вращения двигателя.
«ЭнерджиСейвер» осуществляет непрерывный контроль нагрузки на валу двигателя, сопоставляет ее с мощностью двигателя и в случае необходимости изменяет напряжение на его контактах. При этом частота вращения привода остается прежней. За счет этого снижаются потери энергии и повышается коэффициент мощности. Уменьшение напряжения обеспечивается путем использования схем встречно-параллельно включенных тиристоров (управляемых диодов), применяемых в устройствах плавного пуска.
При подаче управляющего импульса тиристоры открываются, а при переходе тока через ноль закрываются. Напряжение на выходе изменяется пропорционально изменению периода задержки открытия тиристора. При данном способе регулирования напряжения «отбор» мощности из питающей сети прекращается в те периоды, когда полупроводниковые переходы тиристоров закрыты. «ЭнерджиСейвер» является идеальным решением для двигателей, работающих в режиме динамично меняющихся нагрузок, потому что время реакции контроллера на происходящие изменения нагрузки составляет не более сотой доли секунды.
Достоинства и недостатки, имеющиеся у контроллеров «ЭнерджиСейвер», определяются принципом их работы. К основным преимуществам контроллеров-оптимизаторов можно отнести:
Единственное ограничение при использовании контроллера «ЭнерджиСейвер» заключается в том, что его невозможно использовать в тех электроприводах, где требуется регулирование скорости вращения ротора электродвигателя.
Контроллеры «ЭнерджиСейвер» используются во всех отраслях сельского хозяйства, промышленности и в сфере ЖКХ. В частности, они устанавливаются на вентиляторах, дробилках, мельницах, лебедках, ленточных транспортерах, крутильных машинах, дерево- и металлообрабатывающих станках.
Контроллеры «ЭнерджиСейвер» позволяют решить проблемы, связанные с работой того или иного агрегата. В частности, они обеспечивают плавный разгон центрифуги, устранение перегрузки кронштейнов при запуске мешалки, нейтрализацию ударных волн в трубопроводах при запуске и остановке двигателей насосов, предотвращение разрывов проволоки волочильного станка и др.
Ассортимент контроллеров включает устройства, различающиеся по степени защиты оболочки (IP20, IP54), по климатическому исполнению (УХЛ1, УХЛ4) и по мощности (5,5–400 кВт). Также доступны контроллеры серии VTG для управления вихревыми тепловыми генераторами.
Наиболее современным оборудованием являются контроллеры-оптимизаторы «ЭнерджиСейвер» серии ESM, в которых скорость реакции на изменение нагрузки в 10 000 раз выше (!), а точность управления в 100 раз выше (!), чем в устройствах предыдущих поколений. Также они отличаются интеллектуальной системой автоматической настройки и возможностью программирования прибора с компьютера.
Таким образом, контроллеры «ЭнерджиСейвер» являются отличной альтернативой частотно-регулируемым приводам двигателя в тех случаях, когда скорость вращения электропривода изменять невозможно или не обязательно. Они могут обеспечить экономию электроэнергии и позволяют продлить срок службы оборудования. Широкая область применения контроллеров-оптимизаторов делает их универсальным решением для многих областей народного хозяйства.
www.kp.ru
Есть в электроустановках позиции, когда без электродвигателя, работающего на постоянном токе, не обойтись. Именно этот электромотор можно регулировать по скорости вращения ротора, что и требуется в электроустановках. Правда, у него масса недостатков, и одни из них – это быстрый износ щеток, если их установка была проведена с искривлением, да и срок их эксплуатации достаточно низок. При износе происходит искрение, поэтому такой движок во взрывоопасных и запыленных помещениях использовать нельзя. Плюс ко всему электродвигатель постоянного тока стоит дорого. Чтобы изменить данную ситуацию, используют асинхронный двигатель и частотный регулятор для асинхронного двигателя.

Практически по всем показателям электродвигатели, работающие на переменном токе, превосходят аналоги на постоянном. Во-первых, они надежнее. Во-вторых, имеют меньшие габариты и вес. В-третьих, цена ниже. В-четвертых, они проще в эксплуатации и подключении.
А вот недостаток у них один – это сложность регулирования частоты вращения. В данном случае стандартные способы регулирования частоты асинхронных двигателей здесь не подойдут, а именно – изменения напряжения, установка сопротивления и так далее. Частотное управление асинхронным электрическим двигателем – была проблема номер один. Хотя теоретическая база известна аж с тридцатых годов прошлого столетия. Все дело упиралось в дороговизну частотного преобразователя. Все изменилось, когда изобрели микросхемы, с помощью которых через транзисторы стало возможным собрать преобразователь частоты с минимальной себестоимостью.
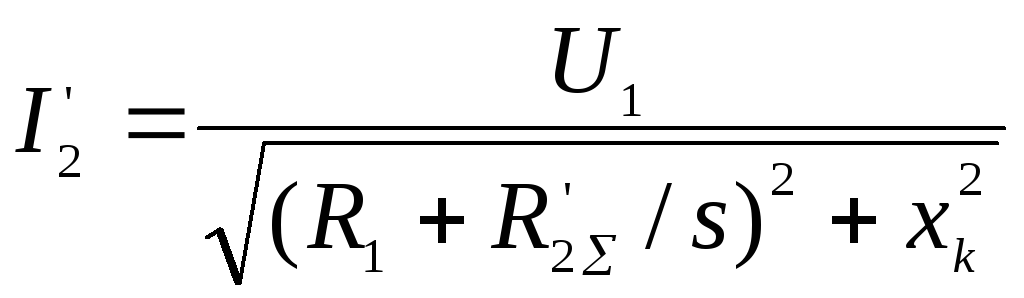
Итак, способ регулирования частоты вращения асинхронного двигателя основано на одной формуле. Вот она внизу.

То есть, получается так, что изменить скорость вращения электродвигателя можно лишь путем изменения частоты напряжения. Что это дает на практике? Первое – это плавность работы мотора, особенно это будет чувствовать при пуске оборудования, когда сам двигатель работает под самыми высокими нагрузками. Второе – повышенное скольжение. За счет этого растет КПД, и снижаются потери мощностных характеристик.
Все современные преобразователи частоты построены на принципе так называемого двойного преобразования. То есть, переменный ток преобразуется в постоянный через неуправляемый выпрямитель и фильтр. Далее, через импульсный инвертор (он трехфазный) происходит обратное преобразование тока постоянного в ток переменный. Инвертор сам состоит из шести силовых ключей (транзисторных). Так вот каждая обмотка электрического движка подключается к определенным ключам выпрямителя (положительному или отрицательному). Именно инвертор изменяет частоту напряжения, которое прикладывается к статорным обмоткам. По сути, именно через него происходит частотное регулирования электродвигателя.

В этом приборе на выходе устанавливаются силовые транзисторы. Они выполняют роль ключей. Если сравнивать их с тиристорами, то необходимо отметить, что первые вырабатывают сигнал в виде синусоиды. Именно данная форма создает минимальные искажения.
Теперь сам принцип работы частотного преобразователя. Чтобы понять это, предлагаем разобрать рисунок ниже.
Итак, пройдемся по рисунку, где
По схеме очень хорошо видно, что инвертор регулирует частоту напряжения за счет системы широтно-импульсного управления (оно высокочастотное). Именно эта часть регулятора отвечает за подключение обмоток статора электродвигателя попеременно то к положительному полюсу выпрямителя, то к отрицательному. Периодичность подключения к полюсам происходит по синусоидальной кривой. При этом частота импульсов определяется именно частотой ШИМ. Так и происходит частотное регулирование.

Как видите, данный способ регулирования частоты вращения асинхронного двигателя достаточно прост. Но и не только. Он позволяет уйти от ненадежных двигателей постоянного тока, перейти на более надежные виды электрического оборудования. К тому же структура прибора, основанная на современных методах преобразования электрического тока, сделала его дешевым и доступным. Плюс ко всему простота устройства дает возможность собрать частотники своими руками.
Частотный преобразователь – принцип работы, схемы подключения и критерии выбора

Асинхронный двигатель – принцип работы и устройство

Конструкционные отличия синхронного и асинхронного двигателя
Созданный в конце XIX столетия, трёхфазный асинхронный двигатель стал незаменимой составляющей современного промышленного производства.
Для плавного пуска и остановки такого оборудования требуется специальное устройство – преобразователь частоты. Особо актуально наличие преобразователя для крупных двигателей с большой мощностью. С помощью этого дополнительного устройства можно регулировать пусковые токи, то есть, контролировать и ограничивать их величину.
 Если регулировать пусковой ток исключительно механическим способом, не удастся избежать энергетических потерь и уменьшения срока службы оборудования. Показатели этого тока в пять-семь раз превышают номинальное напряжение, что недопустимо для нормальной работы оборудования.
Если регулировать пусковой ток исключительно механическим способом, не удастся избежать энергетических потерь и уменьшения срока службы оборудования. Показатели этого тока в пять-семь раз превышают номинальное напряжение, что недопустимо для нормальной работы оборудования.
Принцип работы современного преобразователя частоты подразумевает использование электронного управления. Они не только обеспечивают мягкий пуск, но и плавно регулируют работу привода, придерживаясь соотношения между напряжением и частотой строго по заданной формуле.
Основное преимущество устройства – экономия в потреблении электроэнергии, составляющая в среднем 50%. А также возможность регулировки с учётом потребностей конкретного производства.
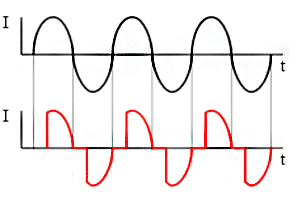
Устройство функционирует по принципу двойного преобразования напряжения.
На выходе выдаются прямоугольные импульсы, которые под воздействием обмотки статора двигателя (её индуктивности) становятся близкими к синусоиде.
 Производители делают упор на стоимость преобразователя. Поэтому многие опции доступны только у дорогих моделей. При выборе устройства следует определиться с основными требованиями для конкретного использования.
Производители делают упор на стоимость преобразователя. Поэтому многие опции доступны только у дорогих моделей. При выборе устройства следует определиться с основными требованиями для конкретного использования.
Дискретные входы (выходы) используются для ввода команд управления и выхода сообщений о событиях (например, о перегреве), цифровые – для ввода сигналов цифровых датчиков (высокочастотных), аналоговые – для ввода сигналов обратной связи.
 Собрать инвертор или преобразователь можно самостоятельно. В настоящее время в сети находится множество инструкций и схем такой сборки.
Собрать инвертор или преобразователь можно самостоятельно. В настоящее время в сети находится множество инструкций и схем такой сборки.
Основная задача – получить «народную» модель. Дешёвую, надёжную и рассчитанную на бытовое применение. Для работы оборудования в промышленных масштабах, конечно, лучше отдать предпочтение устройствам, реализуемым магазинами.Порядок действий по сборке схемы частотного преобразователя для электродвигателя
Для работы с домашней проводкой, с напряжением 220В и одной фазой. Примерная мощность двигателя до 1кВт.

На заметку. Длинные провода нужно снабдить помехоподавляющими кольцами.
Регулировка вращения ротора двигателя вмещается в диапазон частоты 1:40. Для малых частот необходимо фиксированное напряжение (IR компенсация).
 Для однофазной проводки на 220В (использования в домашних условиях) подключение осуществляется по схеме «треугольник». Выходной ток не должен превышать 50% от номинального!
Для однофазной проводки на 220В (использования в домашних условиях) подключение осуществляется по схеме «треугольник». Выходной ток не должен превышать 50% от номинального!
Для трёхфазной проводки на 380В (промышленного использования) подключение двигателя к частотному преобразователю осуществляется по схеме «звезда».
Преобразователь (или инвертор ) имеет соответствующие клеммы, помеченные буквами.
Для продления срока эксплуатации преобразователя необходимо соблюдать следующие правила:
Повышение температур приводит к засыханию термопроводящей пасты и разрушению конденсаторов. На силовых компонентах привода её следует менять ни реже одного раза в три года.
Управление асинхронным мотором (например, как подключить трёхфазный электродвигатель в сеть 220в ) – довольно сложный процесс. Преобразователи, изготовленные кустарно, дешевле промышленных аналогов и вполне подходят для использования в бытовых целях. Однако для применения на производстве предпочтительнее установить инверторы, собранные в заводских условиях. Обслуживание таких дорогих моделей под силу только хорошо обученному техническому персоналу.
Двигатель асинхронного типа используется повсеместно. Основное предназначение – преобразование электричества в механическую силу. Электродвигатель — своего рода противоположность генератора.

Учитывая особенность того, что рассматриваемый механизм работает от электричества, особые требования предъявляются к показателям электроэнергии. Часто можно встретить ситуацию, когда в цепи присутствует частотный преобразователь, который создан специально для асинхронного типа двигателя.
В системе питания, созданной для асинхронного двигателя, рассматриваемый аппарат служит для изменения тока с 1 или 3 фазами, который приходит от сети питания и имеет частоту 50 Гц, в трехфазный ток, показатель частоты от различных условий может быть от 1 до 800 Гц.
Кроме вышеприведенной информации, стоит уточнить следующее:
Приобрести также можно варианты исполнения для бытового использования.

Рассматриваемое устройство состоит из следующих элементов:
Многие построены на основе двойного преобразования.
Можно выделить 2 основных класса:
2 вышеприведенных класса имеют свои особенности, которые определяют возможность и целесообразность их использования тех или в иных условиях.
Непосредственная связь обуславливается тем, что преобразователь представлен выпрямителем управляемого типа. Используемая система управления проводит отпирание группы тиристоров и также проводит подвод напряжения к обмотке электродвигателя.
В данном случае, напряжение преобразуется путем вырезания синусоид из входного тока. Проведенные измерения показывают, что получаемая частота находится в приблизительном промежутке от 0 до 30 Гц. Использовать подобный вариант исполнения нельзя в регулируемых приводах.
Для того, чтобы использовать незапираемые тиристоры, нужно организовывать сложные системы управления, которые значительно повышают стоимость создаваемой цепи.

При выходе синусоида с непосредственной связью, приводит к следующему:
Кроме этого, компенсаторы значительно повышают стоимость цепи, ее габариты и вес. Включение дополнительного элемента в цепь также приводит к уменьшению показателя КПД из-за возникающих потерь.
Современные цепи питания часто создаются при использовании преобразователя, который имеет промежуточное звено.
В данном случае, проводится процедура, предусматривающая двойное преобразование электрического тока:
Как правило, процедура двойного преобразования приводит к значительному снижению показателя КПД, вследствие чего также ухудшаются показатели соотношения массы и габаритов.
К основным достоинствам преобразователей частоты, которые работают как тиристор, можно отнести следующее:
Данные особенности являются основными отличительными признаками работы двух типов преобразователей.
 Использовать частотные преобразователи следует только с учетом эксплуатационных характеристик. К основным техническим характеристикам, на которые нужно обратить внимание, можно отнести:
Использовать частотные преобразователи следует только с учетом эксплуатационных характеристик. К основным техническим характеристикам, на которые нужно обратить внимание, можно отнести:
Подобные параметры должны быть указаны в спецификации преобразователя частот. Если, к примеру, не учесть напряжение подаваемого тока, рассматриваемое устройство будет испорчено.

Провести подключение преобразователя частоты можно различными схемами. Все зависит от того, с какой целью рассматриваемый элемент включается в сеть, к примеру, для более легкого старта или регулировки частоты вращения.
Довольно простой схемой подключения частотника можно назвать размещение устройства автоматического выключения перед ним. Подобное устройство должно быть адоптировано для работы с током, величина его должна составлять величину номинального показателя потребляемого тока электродвигателя.
Стоит отметить, что многие модели частотников могут работать с трехфазной сетью, поэтому можно выбрать обычный трехфазный автомат. На момент возникновения короткого замыкания, одна из фаз проводит обесточивание других. Если же преобразователь частоты рассчитан на однофазную сеть, стоит выбрать выключатель, который рассчитан на утроенный ток одной фазы.
Частотники рассчитаны исключительно на прямое включение в сеть.
Дальнейшая работа по подключению заключается в присоединении фазных проводов к определенным клеммам электродвигателя. Также, проводится включение внешнего тормозного резистора в цепь. Кроме этого, в сеть можно включить вольтметр для измерения напряжения в цепи на выходе после преобразователя.
Как правило, современные варианты исполнения частотников имеют подробную инструкцию того, каким образом они должны быть включены в сеть. Подобную информацию стоит учитывать при создании цепи подключения электродвигателя к источнику питания.

Изначальной задачей каждого производителя можно назвать продать свою продукцию. Именно поэтому, следует обратить внимание на нижеприведенные нюансы правильного выбора:
Вышеприведенные особенности следует учитывать при выборе преобразователя частоты.
Выделим следующие модели рассматриваемого оборудования:

Стоимость этой модели составляет 15 000 рублей. Значение мощности 0,75 кВт, выходного тока 2,1 А. Вес подобного блока составляет 1,5 кг. Блок компактный и прост в использовании. Данный вариант исполнения имеет встроенный блок управления.

Стоимость около 24 000 рублей. Значение мощности 1,1 кВт, выходного тока 3,3. Вес блока составляет 5 кг. Довольно дорогая модель, несмотря на небольшое повышение выходных показателей.

Мощный блок, который может работать при 90 кВт. Стоимость около 250 000 рублей. Выходной ток 176 А. Установка имеет вес 50 кг. Рассматриваемая установка одна из самых дорогих. Имеет довольно большие габаритные размеры, несколько напоминает шкаф.
Существует огромное количество моделей, их стоимость зачастую зависит от эксплуатационных характеристик.

Назначение и подключение пусковых конденсаторов для электродвигателей

Как правильно выбрать автоматические выключатели?

Как сделать импульсный блок питания своими руками?
Источники: http://onlineelektrik.ru/eoborudovanie/edvigateli/chastotnyj-regulyator-dlya-asinxronnogo-dvigatelya-ustrojstvo-i-princip-raboty.html, http://elektrik24.net/elektrooborudovanie/elektrodvigateli/preobrazovatel-chastoty/dlya-asinhronnyih-dvigateley.html, http://slarkenergy.ru/oborudovanie/engine/preobrazovatel-chastoty.html
electricremont.ru