





Синхронный двигатель не может быть запущен простым включением в сеть, поскольку его вращающий момент при пуске равен нулю. Это можно объяснить следующим образом. Пусть в момент включения двигателя направление питающего тока в обмотках статора соответствует рис. 9.6, а. В этот момент на неподвижный ротор будет действовать пара сил F, стремящихся повернуть его по часовой стрелке. Через полпериода направление тока в обмотках статора изменится на противоположное (рис. 9.6, б). Так как ротор в силу своей инерции за это очень короткое время практически остается на месте, то на него теперь будет действовать такая же пара сил F1, стремящаяся повернуть ротор в обратную сторону. Таким образом, при непосредственном включении синхронного двигателя в сеть его ротор не сдвинется с места. Как уже говорилось в предыдущем разделе, за полпериода переменного тока ротор должен повернуться к следующему полюсу статора (при одной паре полюсов обмотки статора — на пол-оборота), и, следовательно, для этого его надо тем или иным способом разогнать до скорости вращения, близкой к синхронной. Таким образом, характерной особенностью синхронного двигателя является необходимость предварительного разгона ротора.
В прошлом для раскручивания ненагруженного синхронного двигателя применялся специальный разгонный асинхронный двигатель небольшой мощности. Сначала ротор разгонялся до скорости, близкой к синхронной, потом включалась обмотка возбуждения, а затем обмотки статора включались в сеть и синхронный двигатель синхронизировался с сетью как генератор при включении на параллельную работу.
В настоящее время синхронные двигатели запускают с помощью асинхронного пуска. Для этого применяется специальная конструкция ротора. В полюсных наконечниках ротора укладываются металлические стержни, соединенные с боков кольцами. Получается дополнительная (пусковая) обмотка, подобная «беличьему колесу» асинхронного двигателя. При пуске такого двигателя обмотку возбуждения закорачивают через активное сопротивление, превышающее активное сопротивление обмотки возбуждения в 10-15 раз, а обмотку статора включают в сеть (в случае двигателей большой мощности через пусковой автотрансформатор или через индуктивные сопротивления). При этом ротор начинает разгоняться так же, как и ротор асинхронного двигателя. После того, как он достигнет наибольшей возможной скорости вращения (примерно 95 % синхронной), обмотку возбуждения подключают к источнику постоянного тока. Двигатель автоматически входит в синхронизм, а дополнительная обмотка в полюсных наконечниках как бы автоматически отключается, поскольку при синхронной скорости вращения поля и ротора ЭДС в ней равна нулю. Для получения большого пускового момента пусковую обмотку (стержни в полюсных наконечниках) изготовляют с большим активным сопротивлением. Закорачивание обмотки возбуждения при асинхронном пуске синхронного двигателя необходимо потому, что вращающееся поле может индуцировать в разомкнутой обмотке возбуждения значительную ЭДС, которая может пробить ее изоляцию. Нельзя также замыкать обмотку возбуждения накоротко, так как в ней возникает значительный однофазный ток, который будет тормозить ротор по достижении им половины синхронной скорости вращения.
Для остановки синхронного двигателя сначала уменьшают ток возбуждения до значения, соответствующего минимальному току обмоток статора, затем отключают статор и лишь после этого размыкают цепь возбуждения. Несоблюдение такого порядка (например, отключение обмотки возбуждения раньше отключения обмоток статора) приведет к чрезмерному увеличению тока в обмотке статора и к опасным для целости изоляции перенапряжениям в разомкнутой обмотке возбуждения.
Достоинством синхронного двигателя является строго постоянная скорость вращения, а недостатком - необходимость применения вспомогательных автоматических устройств для пуска и остановки двигателя.
Рабочими характеристиками синхронного двигателя являются зависимости потребляемой мощности Р1, потребляемого тока I1,вращающего момента М , соs фи и к.п.д. от полезной мощности нагрузки Р2. Они изображены на рис. 9.7 и соответствуют случаю, когда на холостом ходу соs фи = 1.
При постоянном токе возбуждения увеличение нагрузки на валу двигателя вызывает уменьшение соs фи, что объясняется увеличением реактивного падения напряжения при возрастании потребляемого от сети тока I1 Коэффициент полезного действия k с увеличением нагрузки быстро увеличивается и достигает максимума, когда не зависящие от нагрузки механические потери и потери в стали становятся равными зависящим от нагрузки потерям в меди обмоток.
Дальнейшее увеличение нагрузки снижает к.п.д. Потребляемый статором ток I1 на холостом ходу мал и при соs фи = 1. При увеличении нагрузки ток I1 возрастает практически пропорционально нагрузке. Вращающий момент М, развиваемый двигателем, на холостом ходу мал, поскольку механические потери невелики. При увеличении нагрузки, благодаря постоянству скорости вращения синхронного двигателя, вращающий момент возрастает почти линейно. Потребляемая двигателем мощность Р1 растет быстрее, чем полезная Р2, так как при увеличении нагрузки сказывается увеличение электрических потерь в двигателе, которые пропорциональны квадрату тока.
К. п д. синхронных машин определяют : к=Р2/Р1, где Р2,Р1- полезная и потребляемая мощность. Т.е. так же, как для машин постоянного тока.
К п. д. синхронных машин небольшой мощности составляет 85—90%, а мощных - до 99%
studfiles.net
Одним из главных недостатков синхронных двигателей является сложность их пуска в ход. Пуск синхронных двигателей может быть осуществлен при помощи вспомогательного пускового двигателя или путем асинхронного пуска.
Пуск синхронного двигателя при помощи вспомогательного двигателя. Если ротор синхронного двигателя с возбужденными полюсами развернуть другим, вспомогательным двигателем до скорости вращения поля статора, то магнитные полюсы статора, взаимодействуя с полюсами ротора, заставят ротор вращаться далее самостоятельно без посторонней помощи, в такт с полем статора, т. е. синхронно (откуда эти двигатели и получили свое название).
Для осуществления пуска необходимо, чтобы число пар полюсов асинхронного двигателя было меньше числа пар полюсов синхронного двигателя, ибо при этих условиях вспомогательный асинхронный двигатель может развернуть ротор синхронного двигателя до синхронной скорости.
Порядок пуска синхронного двигателя следующий. Включая рубильник 3, пускают вспомогательный асинхронный двигатель 2, который разворачивает ротор синхронного двигателя 1 до скорости, соответствующей скорости поля статора. Скорость вращения вспомогательного двигателя определяется по тахометру1. Затем, включая рубильник 4 постоянного тока, возбуждают полюсы ротора. Чтобы включить синхронный двигатель в сеть трехфазного тока, его нужно синхронизировать так же, как и при включении синхронного генератора на параллельную работу. Для этого реостатом 5 устанавливают такое возбуждение, чтобы напряжение обмотки статора по вольтметру V было равно напряжению сети, указываемому вольтметром V1.
Электролампы 6, включенные параллельно ножам рубильника 7 трех-фазной сети, при разомкнутом рубильнике будут мигать. Сначала мигание будет частым, но если изменять скорость вращения вспомогательного асинхронного двигателя, то лампы будут мигать . все реже и реже. Синхронный двигатель можно включить в сеть трехфазного тока рубильником 7 тогда, когда все три лампы одновременно погаснут. Ротор двигателя при этом входит в синхронизм и может далее вращаться самостоятельно. Теперь вспомогательный двигатель 2 рубильником 3 можно отключить от сети.
Сложность пуска и необходимость вспомогательного двигателя являются существенными недостатками этого способа пуска синхронных двигателей. Поэтому в настоящее время он применяется редко.
Асинхронный пуск синхронного двигателя. Для осуществления этого способа пуска в полюсных наконечниках полюсов ротора укладывается дополнительная короткозамкнутая обмотка. Так как во время пуска в обмотке возбуждения 1 двигателя наводится большая э. д. с, то по соображениям безопасности она замыкается рубильником 2 на сопротивление 3
При включении напряжения трехфазной сети в обмотку статора 4 синхронного двигателя возникает вращающееся магнитное поле, которое, пересекая короткозамкнутую (пусковую) обмотку, заложенную в полюсных наконечниках ротора, индуктирует в ней токи.
Эти токи, взаимодействуя с вращающимся полем статора, приведут ротор во вращение. При достижении ротором наибольшего числа оборотов (95—97% синхронной скорости) рубильник 2 переключают так, чтобы обмотку ротора включить в сеть постоянного напряжения.
Недостатком асинхронного пуска является большой пусковой ток (в 5—7 раз больший рабочего тока). Пусковой ток вызывает падение напряжения в сети, а это отражается на работе других потребителей. Для уменьшения пускового тока применяют пуск при пониженном напряжении с помощью реактора 2 или автотрансформатора.
В настоящее время применяют почти исключительно асинхронный пуск синхронных двигателей ввиду его простоты и надежности. Существуют также схемы автоматического асинхронного пуска синхронных двигателей
17. Сравнение синхронных и асинхронных двигателей.
Обмотки статора обоих двигателей получают питание от сети трехфазного переменного тока. Для питания обмотки возбуждения синхронного двигателя требуется, кроме того, источник электрической энергии постоянного тока, правда, относительно небольшой мощности.
Асинхронный пуск синхронных двигателей несколько сложнее пуска асинхронных двигателей с короткозамкнутым ротором. В отношении пусковых свойств асинхронные двигатели с фазным ротором имеют весьма существенные преимущества перед синхронными двигателями.
Частота вращения синхронных двигателей остается постоянной при изменении нагрузки, тогда как у асинхронных двигателей даже при их работе на естественной характеристике она несколько изменяется.
Асинхронные двигатели дают возможность регулировать частоту вращения различными способами (изменением числа пар полюсов, измерением частоты напряжение источника питания). Синхронные двигатели относятся к двигателям с нерегулируемой частотой вращения.
Воздействуя на ток возбуждения синхронного двигателя, можно в широких пределах изменять его коэффициент мощности. Можно, в частности, заставить синхронный двигатель работать с cosφ = 1, а также с опережающим током. Последнее может быть использовано для улучшения коэффициента мощности других потребителей, питающихся от той же сети. В отличие от этого асинхронный двигатель представляет собой активно-индуктивную нагрузку и имеет всегда cosφ < 1.
Из-за малых потерь мощности в роторе, а также в обмотке статора при работе с высоким cosφ к.п.д. синхронных двигателей оказывается больше, а масса и габаритные размеры меньше, чем у асинхронных двигателей.
Учитывая указанные достоинства синхронных двигателей, стараются везде, где это возможно, вместо асинхронных двигателей применять синхронные. Они применяются обычно в установках средней и большой мощности при редких пусках, в случаях, когда не требуется электрического регулирования частоты вращения. Синхронные двигатели используются, например, для привода насосов, компрессоров, вентиляторов, генераторов постоянного тока преобразовательных установок.
studfiles.net
Синхронный двигатель при подключении его обмоток статора к источнику питания не развивает пускового момента, поскольку ротор из-за своей инерционности не может мгновенно достичь частоты вращения, равной частоте вращения магнитного поля статора, которая устанавливается почти одновременно с включением обмотки статора в сеть. Поэтому между полюсами возбужденного ротора и вращающегося поля статора не возникает устойчивой магнитной связи, создающей синхронный вращающий момент.
Для пуска синхронного двигателя необходимо предварительно привести ротор во вращение с частотой, близкой частоте вращения поля статора. В этих условиях поле статора настолько медленно перемещается относительно полюсов вращающегося ротора, что при подключении обмотки возбуждения к источнику питания между полюсами ротора и вращающегося поля статора устанавливается магнитная связь, обеспечивающая возникновение синхронного электромагнитного момента. Под действием этого момента ротор втягивается в синхронизм, т.е. начинает вращаться с синхронной частотой.
С уществует несколько способовпуска синхронного двигателя, но практическое применение получил асинхронный пуск. Для его реализации в пазах полюсных наконечников ротора располагают стержни пусковой короткозамкнутой обмотки, выполненной аналогично обмотке короткозамкнутого ротора. Обычно стержни этой обмотки делают из латуни или меди и замыкают с двух сторон медными кольцами. Для пуска синхронного двигателя замыкают обмотку возбуждения ОВ на резистор r (рисунок), включают в трехфазную сеть обмотку статора. Вращающееся поле статора индуцирует в стержнях пусковой обмотки ЭДС и в этих стержнях возникают токи. В результате взаимодействия этих токов с вращающимся полем статора на каждый стержень ротора действует электромагнитная сила
уществует несколько способовпуска синхронного двигателя, но практическое применение получил асинхронный пуск. Для его реализации в пазах полюсных наконечников ротора располагают стержни пусковой короткозамкнутой обмотки, выполненной аналогично обмотке короткозамкнутого ротора. Обычно стержни этой обмотки делают из латуни или меди и замыкают с двух сторон медными кольцами. Для пуска синхронного двигателя замыкают обмотку возбуждения ОВ на резистор r (рисунок), включают в трехфазную сеть обмотку статора. Вращающееся поле статора индуцирует в стержнях пусковой обмотки ЭДС и в этих стержнях возникают токи. В результате взаимодействия этих токов с вращающимся полем статора на каждый стержень ротора действует электромагнитная сила  . Совокупность таких сил создает на роторе асинхронный электромагнитный момент
. Совокупность таких сил создает на роторе асинхронный электромагнитный момент  , поддействием которого ротор начинает вращаться в ту же сторону, что и поле статора. После разгона ротора до частоты вращения, близкой к синхронной (
, поддействием которого ротор начинает вращаться в ту же сторону, что и поле статора. После разгона ротора до частоты вращения, близкой к синхронной ( ), обмотку возбужденияОВ подключают к источнику постоянного тока. При этом двигатель возбуждается (полюса ротора намагничиваются), между вращающимся полем статора и полюсами ротора устанавливается устойчивая магнитная связь, создающая синхронный электромагнитный момент
), обмотку возбужденияОВ подключают к источнику постоянного тока. При этом двигатель возбуждается (полюса ротора намагничиваются), между вращающимся полем статора и полюсами ротора устанавливается устойчивая магнитная связь, создающая синхронный электромагнитный момент  , и двигатель втягивается в синхронизм, т.е. его ротор начинает вращаться синхронно с вращающимся магнитным полем. При этом в пусковой обмотке ротора больше не наводится ЭДС, поэтому асинхронный момент
, и двигатель втягивается в синхронизм, т.е. его ротор начинает вращаться синхронно с вращающимся магнитным полем. При этом в пусковой обмотке ротора больше не наводится ЭДС, поэтому асинхронный момент  .
.
Также достаточно распространен метод пуска синхронного двигателя посредством асинхронного, находящегося на одном валу с ним. АД выбирается такой чтобы его номинальная скорость наиболее совпадала с синхронной скоростью СД. Затем происходит пуск асинхронного двигателя. Частота вращения синхронного двигателя приближается к синхронной частоте и в тот момент когда фаза напряжения питающей сети и фаза напряжения статора примерно совпадают, производят включение обмотки статора в сеть и двигатель втягивается в синхронизм.
studfiles.net
Этот способ несложен, но сопровождается значительными всплесками тока и электромагнитных сил и требует дополнительных мер:
а) на роторе необходима замкнутая многофазная обмотка (или замкнутые контуры), чтобы двигатель смог разгоняться как асинхронный под действием асинхронного электромагнитного момента (от взаимодействия поля и наведенных токов в этой обмотке). Эту обмотку называют пусковой и устраивают как короткозамкнутую беличью клетку: неизолированные медные или латунные стержни располагают в пазах полюсных наконечников и приваривают к медным сегментам, образующим короткозамыкающие кольца;
б) при пуске вращающееся поле наводит в замкнутой цепи обмотки возбуждения синхронного двигателя однофазный переменный ток, создающий электромагнитный момент, ухудшающий условия пуска; оставить же цепь обмотки возбуждения разомкнутой нельзя из-за опасности пробоя изоляции этой обмотки значительной наводимой ЭДС, так как обмотка возбуждения имеет большое количество витков и ее потокосцепление изменяется с большой частотой в начале пуска. Выход: обмотку возбуждения замыкают на разрядное сопротивление Rp=(5...12)Rв, где Rв - сопротивление обмотки возбуждения. При этом невелики напряжение на зажимах обмотки возбуждения и переменный ток в этой обмотке.
Итак, предварительно обмотку возбуждения отключают от возбудителя и замыкают на разрядное сопротивление Rp. Далее обмотку статора включают в сеть, и двигатель запускается как асинхронный. Возникающее вращающееся магнитное поле статора наводит в электропроводящих контурах ротора ЭДС и токи с частотой f2=f1s, где s – скольжение ротора относительно поля. В используемой на стенде синхронной машине имеется два типа электропроводящих контуров на роторе: обмотка возбуждения и контуры, образованные ферромагнитными частями (сердечниками полюсов). Пусковая обмотка отсутствует. Обмотка возбуждения подключена к большому разрядному сопротивлению Rp , поэтому ее ток и соответствующий электромагнитный момент невелики. Создаётся асинхронный момент в основном от взаимодействия наведённых токов в ферромагнитных частях ротора с вращающимся полем обмотки статора. Под действием этого асинхронного момента ротор разгоняется и скольжение уменьшается. Пока скорость двигателя невелика, скольжение s и частота f2 достаточно большие. Примерно через 3-5 с после включения скорость ротора приблизится к синхронной (n 0,95n1), s и f2 уменьшаются. При этом следует сразу же подать возбуждение в синхронный двигатель (переключить SAI5В), чтобы он втянулся в синхронизм. Возникают всплеск тока якоря и дополнительные электромагнитные моменты, под действием которых ротор после ударов и качаний, как правило, втягивается в синхронизм.
Подаваемый ток возбуждения должен обеспечить ЭДС Е U1. При подсинхронной скорости разность частот f1 - f составляет около 5%. Совпадение фаз ЭДС машины и напряжения сети здесь не контролируется вообще, поэтому асинхронный пуск соответствует грубой синхронизации. Наилучшие условия втягивания в синхронизм получаются, если возбуждение подается при n ≥ 0,95n1 и если момент нагрузки меньше номинального входного момента Mвх. Последний представляет собой электромагнитный момент, развиваемый машиной при асинхронном пуске, когда n = 0,95n1.
Асинхронный пуск является самым распространенным способом пуска синхронных двигателей.
12.4. V - образные характеристики
V- образные характеристики представляют собой зависимость тока якоря I и коэффициента мощности cos двигателя от тока возбуждения iв при постоянных значениях напряжения обмотки якоря U и его частоты f и постоянной отдаваемой механической мощности P2 . Эти характеристики отражают важную особенность синхронных двигателей - возможность регулирования их реактивной мощности и cos.
Рассмотрим V - образные характеристики двигателей на примере неявнополюсной машины. Необходимые пояснения даны с помощью упрощенных векторных диаграмм синхронного двигателя, представленных на рис. 12.3.
Если принять потери в обмотке и стали якоря, механические и добавочные потери постоянными, то при P2= const подводимая к обмотке якоря мощность также постоянна, P1= mUIcos = const, и, следовательно, активная составляющая тока якоря также неизменна - Iа=Icos =const. Поэтому на векторной диаграмме (рис.12.3) конец вектора тока якоря I при разных значениях тока возбуждения iв скользит по прямой АВ. Для каждого значения I величина iв может быть определена из уравнения токов синхронной машины  , отражающего уравнение МДC
, отражающего уравнение МДC  . Так,iв представляет собой результирующую МДС в зазоре F в масштабе тока возбуждения, I - МДС реакции якоря Fa в масштабе тока возбуждения или приведенный ток якоря. Ток возбуждения прямо пропорционален МДС Fв обмотки возбуждения.
. Так,iв представляет собой результирующую МДС в зазоре F в масштабе тока возбуждения, I - МДС реакции якоря Fa в масштабе тока возбуждения или приведенный ток якоря. Ток возбуждения прямо пропорционален МДС Fв обмотки возбуждения.
Величина iв может быть определена по результирующей ЭДС Eобмотки якоря  , индуктированной результирующим магнитным полем воздушного зазора. Если пренебречь для простоты сопротивлениями рассеяния xsa= 0 и активным ra= 0, то
, индуктированной результирующим магнитным полем воздушного зазора. Если пренебречь для простоты сопротивлениями рассеяния xsa= 0 и активным ra= 0, то  и, следова -
и, следова -

Рис. 12.3. Упрощённые векторные диаграммы синхронного двигателя
тельно, iв const. Вектор  , как и вектор результирующего потока в зазоре
, как и вектор результирующего потока в зазоре  , опережает
, опережает  на 90о. Вектор
на 90о. Вектор  совпадает по направлению с током якоря, и конец его скользит по прямойA'B', параллельной линии АВ, так как I' прямо пропорционален току якоря.
совпадает по направлению с током якоря, и конец его скользит по прямойA'B', параллельной линии АВ, так как I' прямо пропорционален току якоря.
На рис. 12.3 построены векторные диаграммы токов для четырёх точек V-образной характеристики и получены токи возбуждения для соответствующих им токов якоря. Для точки 1 на рис.12.3 выполнено также построение векторной диаграммы напряжений по уравнению , гдеЕ - ЭДС, индуктированная в обмотке якоря полем обмотки возбуждения; xc - синхронное индуктивное сопротивление.
, гдеЕ - ЭДС, индуктированная в обмотке якоря полем обмотки возбуждения; xc - синхронное индуктивное сопротивление.
На рис. 12.4 представлены V- образные характеристики I = f(iв) и cos = f(iв) для P2= 0 (холостой ход) и P2= const 0.
На рис.12.3 и на характеристиках рис. 12.4 точка 1 соответствует перевозбуждению двигателя, когда реактивная мощность отдается в сеть, Q>0; точка 2 - нормальному возбуждению, когда Q = 0 и cos = 1; точка 3 - недовозбуждению, когда реактивная мощность потребляется из сети, Q < 0; точка 4 соответствует недовозбуждению и пределу статической устойчивости синхронного двигателя, когда угол нагрузки равен критическому значению кр. Угол - это угол между векторами U и E.
 Рис. 12.4.V-образные характеристики
Рис. 12.4.V-образные характеристики
Угол называют углом нагрузки, так как он характеризует уровень нагрузки синхронного двигателя. Как видно из рис. 12.3, при уменьшении тока возбуждения и P2 =const 0 угол нагрузки увеличивается и в точке 4 достигает критического значения - кр=90°. Точка 4 лежит на линии CD рис.12.4, которая является границей устойчивой работы синхронного двигателя. При iв < iв4 двигатель выпадает из синхронизма.
studfiles.net
Внимательно изучите п.12.3.2. В этом опыте и во всех последующих режимные переключатели стенда должны быть установлены в положения: SA10Г, SA11ГПА, SAI20, т.е. машина постоянного тока используется как нагрузочный генератор; SA6 + или – , SA13ДС. Перед пуском двигателя установите UAmin, Uв1min, Rнгmax, xнгmax. При SA15B установите ток возбуждения синхронного двигателя iвн= iвс, где iвс – ток возбуждения из предыдущего опыта точной синхронизации, при котором обеспечивалось равенство Е= U3. После этого переключите обмотку возбуждения на разрядное сопротивление (SA15Rр), а КИП – на предел по току не менее 25 А.
Асинхронный пуск производите следующим образом. При обмотке возбуждения, замкнутой на разрядное сопротивление, включите синхронный двигатель на источник напряжения U3с помощью кнопки S3. С началом процесса пуска наблюдайте за показаниями указателя частоты вращения ротора и амперметра РА4 в цепи возбуждения. Когда ротор разгонится до скорости n1300 об/мин, а период колебания стрелки РА4 будет не менее 0,5 с, включите возбуждение синхронного двигателя переключением SAI5B. После нескольких колебаний ротора, заметных по показателям РА4 и на слух, двигатель втягивается в синхронизм, о чем будет свидетельствовать существенное уменьшение тока статора и установление тока возбуждения. Если же машина не втянулась в синхронизм, следует немедленно ее выключить, проанализировать ситуацию и повторить запуск, тщательно выполняя все операции.
Для успешного усвоения повторите пуск 2-3 раза. Измерьте и запишите в протокол испытания наибольшее значение всплеска тока обмотки якоря Imax в момент включения двигателя, а также установленное значение тока возбуждения iва , подаваемого в конце процесса асинхронного пуска.
При выполнении последующих опытов работы рекомендуется использовать асинхронный способ пуска синхронного двигателя.
Характеристики снимают при холостом ходе и при нагрузке – по указанию преподавателя.
12.9.1. Снятие характеристик при холостом ходе.
Характеристики снимаются при выключенном генераторе G1. Запустите синхронный двигатель асинхронным способом пуска (п. 12.8). Плавно регулируя ток возбуждения синхронного двигателя и наблюдая за показаниями амперметра в цепи обмотки статора, установите такое значение тока возбуждения iв= iв5, при котором ток якоря будет минимальным – I=Imin1(рис. 12.4), и произведите первый отсчет этих токов.
Увеличивайте ток возбуждения iв до таких значений, при которых ток якоря (статора) равен номинальному значению I=Iн (рис. 12.4), а затем уменьшайте iвот значения iв5 до получения I=Iн. Для каждой ветви характеристики снимите 5-6 точек, причем особенно тщательно вблизи I=Imin1.
Измерьте и запишите в табличной форме линейные значения тока I, напряжения U и активной мощности Р1ф одной фазы статорной обмотки и ток возбуждения iв.
В отчете запишите в табличной форме измеренные значения тока обмотки статора, суммарной мощности всех фаз Р1= 3Р1ф и тока возбуждения, а также вычисленные значения коэффициента мощности:
cos = P1/3UI.
На едином рисунке отчета, подобном рис. 12.4, постройте V -образные характеристики I, cos = f(iв) при P2 =0.
12.9.2. Снятие характеристик при нагрузке.
V-образные характеристики снимите при такой постоянной нагрузке на валу двигателя P2=const, при которой обеспечивается ток обмотки статора Imin2, заданный преподавателем (рис. 12.4). Запустите синхронный двигатель, включите нагрузочный генератор G1 и установите его максимальное возбуждение Uв1. Изменяя нагрузочное сопротивление Rнг и возбуждение Uв1 генератора G1, нагрузите синхронный двигатель так, чтобы обеспечивалось заданное значение тока Imin2. При этом минимум тока обмотки статора определяйте, изменяя ток возбуждения iв синхронной машины, а уровень этого минимума устанавливайте изменением Rнг нагрузки G1 и, более точно, возбуждением генератора. Первый отсчет произведите в точке I =I min2, iв= iв2. Далее в ходе опыта поддерживайте (не изменяйте) сопротивление Rнг и возбуждение генератора Uв1. При этом остаются постоянными тормозной момент М2 и мощность Р2 синхронного двигателя. В остальном проводите опыт и обрабатывайте его результаты аналогично предыдущему (п. 12.9.1).
В отчете все V-образные кривые постройте на одном общем рисунке (подобном рис. 12.3). Отметьте на нем зоны перевозбуждения и недовозбуждения двигателя и штрихами нанесите ориентировочную границу между ними.
studfiles.net
Синхронный двигатель непосредственным включением обмотки статора (якоря) в сеть переменного тока не может быть запущен в ход.
Объясняется это следующим образом. При включении многофазной обмотки якоря в сеть практически мгновенно образуется вращающееся магнитное поле, частота вращения которого nпзависит от частоты f протекающего по обмоткам тока (nп =60 f /p). «Полюсы» этого поля, перемещаясь в пространстве, будут взаимодействовать то с одноименными, то с разноименными полюсами неподвижного возбужденного ротора. В соответствии с этим будетменяться направление вращающего момента, действующего на ротор. В течение половины периода изменения тока в обмотках момент будет направлен в одну сторону, а в течение другой половины — в противоположную.
Пуск мог бы произойти, если бы ротор разогнался до установившейся скорости в течение полупериода, когда вращающий момент не меняет свой знак. При частоте 50 Гц полупериод равен 0,01 с. Из-за механической инерции за такое время роторы практически всех синхронных двигателей развернуться не смогут.
Существует несколько способов пуска двигателя. Эти способы заключаются в том, что в процессе пуска ротор двигателя разгоняется до скорости вращающегося поля, после чего двигатель входит в синхронизм и начинает работать как синхронный. Применение получили пуск с помощью разгонного двигателя, частотный пуск и асинхронный пуск. Наибольшее распространение имеет асинхронный пуск.
Пуск с помощью разгонного двигателя состоит в том, что посторонним (разгонным) двигателем ротор синхронной машины разворачивается до номинальной скорости. Обмотка возбуждения включена в сеть постояного тока, а обмотка статора разомкнута. Затем производят включение её на параллельную работу с сетью способами, изложенными в гл. 3 (машина работает генератором). После подключения машины к сети разгонный двигатель механически отсоединяют от вала синхронной машины, и последняя переходит в двигательный режим. Мощность разгонного двигателя невелика и составляет 10—20 % номинальной мощности синхронного двигателя. Эта мощность покрывает мощность механических и магнитных потерь в синхронном двигателе.
Частотный пуск применяется в том случае, если синхронный двигатель подключен к автономному источнику, частоту напряжения которого можно изменять от нуля до номинальной. Если плавно повышать частоту питающего напряжения, то соответственно будет увеличиваться скорость магнитного поля. Ротор, следуя за полем, постепенно будет повышать свою скорость от нуля до номинальной. В процессе пуска машина все время работает в синхронном режиме.
Асинхронный пуск аналогичен пуску асинхронного двигателя. Для этого на роторе в полюсных наконечниках размещают пусковую обмотку. Эта обмотка выполняется по типу короткозамкнутой обмотки ротора асинхронного двигателя и имеет то же устройство, что и демпферная обмотка генератора (см. гл. 1). При пуске трехфазная обмотка статора включается в сеть. Ток, который будет протекать по этой обмотке, создаст вращающееся магнитное поле. Оно наведёт в пусковой обмотке ротора ЭДС и ток. В результате взаимодействия тока пусковой обмотки ротора с вращающимся магнитным полем образуется момент, под действием которого ротор придет во вращение и развернется до скорости, близкой к скорости поля ω1. Вращение его будет происходить со скольжением, которое зависит от нагрузки на валу (ω< ω1).
Вхождение в синхронизм достигается после включения постоянного тока в обмотку возбуждения за счет возникающего при этом синхронизирующего момента. С этого времени машина начинает работать как синхронный двигатель.
На рис. 4.6 показана схема асинхронного пуска. При пуске обмотка возбуждения не должна быть разомкнутой, так как в противоположном случае вследствие большого числа витков в нейвращающимся полем индуцировалась бы большая ЭДС, опасная не только для изоляции, но и для обслуживающего персонала. Обмотку возбуждения нельзя также замыкать накоротко, так как в этом случае она образует несимметричный (однофазный) контур. Он явится причиной образования дополнительного момента, под действием которого произойдет провал в кривой механической характеристики вблизи полусинхронной скорости. Из за этого ротор при пуске может застрять на промежуточной скорости (в точке А на рис. 4.7). В начале пуска обмотка возбуждения LM должна быть замкнута на резистор с сопротивлением, приблизительно в 10—15 раз большим, чем сопротивление самой обмотки (положение 1 переключателя S). По окончании пуска переключатель S переводится в положение 2, и обмотка возбуждения включается в сеть постоянного тока.
Рис. 4.6. Схема асинхронного пуска синхронного двигателя
Рис. 4.7. Механическая характеристика двигателя при асинхронном пуске с провалом вблизи полусинхронной скорости
Рис. 4.8. Механическая характеристика двигателя при асинхронном пуске
Асинхронный пуск синхронного двигателя характеризуется значениями пускового тока Iп и вращающих моментов – начального пускового Мпи входного Мв(рис. 4.8). Входным называется асинхронный момент при скорости ротора, равной 0,95 ω1. Этот момент равен наибольшему нагрузочному моменту, при котором возможно вхождение двигателя в синхронизм при включении постоянного тока в обмотку возбуждения.
Если сеть, в которую включается синхронный двигатель, недостаточно мощна, то во избежание большого падения напряжения при асинхронном пуске применяют меры для снижения начального пускового тока: включение через автотрансформатор, реактор и т.д. (см. пуск АД).
www.poznayka.org
Синхронный двигатель не имеет начального пускового момента. Если его подключить к сети переменного тока, когда ротор неподвижен, а по обмотке возбуждения проходит постоянный ток, то за один период изменения тока, электромагнитный момент будет дважды изменять свое направление. Ротор обладает инерцией и не может быть в течение одного полупериода разогнан до синхронной частоты вращения. Следовательно, для пуска синхронного двигателя необходимо разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронной.
Для пуска могут быть используются следующие способы:
1. Асинхронный пуск.
2. Пуск с помощью разгонного двигателя.
3. Частотный пуск.
При пуске с помощью разгонного двигателя обмотка статора отключена от сети, а на обмотку возбуждения подается напряжение постоянного тока. Специальный разгонный двигатель разворачивает ротор синхронного двигателя до частоты вращения близкой к синхронной. Затем обмотка статора включается в сеть, а разгонный двигатель выключают.
Асинхронный пуск аналогичен пуску асинхронного двигателя. Для этого синхронный двигатель снабжают специальной коротко-замкнутой пусковой обмоткой, выполненной по типу «беличья клетка» и уложенной в полюсных наконечниках ротора. Чтобы увеличить сопротивление стержней, клетку изготовляют из латуни. Обмотку возбуждения предварительно замыкают на гасящий резистор, сопротивление которого в 8—12 раз превышает активное сопротивление обмотки возбуждения с целью избежать перенапряжений.
При включении трехфазной обмотки статора в сеть образуется вращающееся магнитное поле статора, которое будет пересекать пусковую обмотку и наведет в ней ЭДС и ток. Вращающееся магнитное поле статора, взаимодействуя с полем пусковой обмотки, создает электромагнитные силы F и вращающий момент. Момент разгонит ротор до частоты вращения, близкой к синхронной (s<0,05). После этого обмотку возбуждения переключают с гасительного резистора на возбудитель. При подаче питания на обмотку возбуждения ротор втягивается в синхронизм.
Возможна схема с постоянно подключенным к обмотке возбуждения возбудителем. В этом случае во время пуска пусковую обмотку можно считать замкнутой накоротко, так как сопротивление возбудителя весьма мало. С уменьшением скольжения до s =0,3-0,4 возбудитель возбуждают. В обмотку возбуждения подается постоянный ток, обеспечивающий при s<0,05 втягивание ротора в синхронизм. Такая схема более простая, но имеет худшие пусковые характеристики, чем схема с гасительным резистором, из-за так называемого одноосного эффекта.
Его суть в том, что ток, индуцируемый в обмотке возбуждения при пуске двигателя, создает обратный электромагнитный момент. При частоте вращения двигателя, меньшей 0,5n1 он является ускоряющим, а при большей частоте — тормозящим. Особенно резко проявляется действие обратного поля при n=0,5n1. 
Пусковой обмотка на роторе существенно уменьшает обратное магнитное поле и создаваемый им момент. Однако этот момент, складываясь с асинхронным моментом пусковой обмотки (кривая 1), создает в кривой результирующего пускового момента провал при частоте вращения, равной половине синхронной (кривая 4). Этот провал тем больше, чем больше ток в обмотке возбуждения. Включение гасительного резистора на период пуска уменьшает ток в этой обмотке и улучшает форму кривой пускового момента.
Если обмотку возбуждения при пуске не отключить от возбудителя, то по якорю возбудителя в период пуска проходит переменный ток, что может вызвать искрение щеток. Поэтому такую схему пуска применяют в случае небольшого нагрузочного момента — не более 50% от номинального, при сравнительно небольшой мощности двигателя.
Свойства двигателя при асинхронном пуске характеризуются на-чальным пусковым моментом Мп при s = 1 и входным моментом М0,05 s = 0,05. В технических данных эти моменты и ток приводятся в долях номинального момента и тока в синхронном режиме.
Особой разновидностью синхронных двигателей являются асинхронизированные двигатели, напоминающие по своему устройству асинхронные двигатели с фазным ротором. От последних они отличаются, тем, что имеют больший воздушный зазор и увеличенное сечение вторичной трехфазной обмотки. При пуске обмотка ротора двигателя замыкается на пусковой реостат. Затем обмотка ротора присоединяется к возбудителю (или выпрямительному устройству), возбуждается постоянным током, и ротор втягивается в синхронизм. Такие двигатели обладает пусковыми характеристиками асинхронного двигателя с фазным ротором и рабочими свойствами синхронного двигателя.
При частотном пуске регулируемым преобразователем плавно повышают частоту от нуля до номинальной. Частота вращения поля статора также плавно изменяется от нуля до синхронной. Ротор, следуя за полем статора, также плавно разгоняется. Одновременно с изменением частоты необходимо регулирование питающего напряжения.
Частоту вращения синхронного двигателя можно регулировать изменением числа пар полюсов. При этом необходимо менять число пар полюсов как на статоре, так и на роторе, что приводит к значительному усложнению конструкции и удорожанию машины.
Поэтому на практике частоту вращения регулируют изменением частоты питающего напряжения. При неизменных значениях нагрузочного момента и тока якоря необходимо выдерживать условие
U/f1 = const,
т. е. изменять напряжение U, подаваемое к электродвигателю от преобразователя частоты, пропорционально изменению частоты. При изменении нагрузки необходимо изменять поток возбуждения Фf и ток If. В чистом виде частотное регулирование применяется только при очень малых мощностях, когда нагрузочные моменты невелики, а инерция приводного механизма мала. При больших мощностях такие условия имеются только в некоторых типах электроприводов, например в электроприводах вентиляторов.
Для синхронных двигателей, применяемых в электроприводах с большим моментом инерции приводного механизма, необходимо очень плавно изменять частоту питающего напряжения, чтобы двигатель не выпал из синхронизма. Для таких электроприводов применяется метод частотного регулирования с самосинхронизацией, при котором управление преобразователем частоты осуществляется от системы датчиков положения ротора. В результате напряжение подается на каждую фазу двигателя при углах нагрузки q < 900. При таком регулировании автоматически обеспечиваются условия устойчивой работы двигателя и его перегрузочная способность определяется только перегрузочной способностью преобразователя частоты.
Синхронные двигатели, регулируемые путем изменения частоты с самосинхронизацией, называют вентильными двигателями.
Синхронный компенсатор
Синхронный компенсатор представляет собой синхронный двигатель, работающий без нагрузки на валу; при этом по обмотке якоря проходит практически только реактивный ток. Синхронный компенсатор может работать в режиме улучшения cosφ или в режиме стабилизации напряжения.
Нагрузка сети носит активно-индуктивный характер – ток нагрузки Iн отстает по фазе от напряжения сети Uc. Для улучшения cosφ сети синхронный компенсатор работает в режиме перевозбуждения. Ток возбуждения регулируется так, чтобы ток якоря I1 синхронного компенсатора опережал на 90° напряжение сети Uc(рис. а) и был примерно равен реактивной составляющей тока нагрузки Iн р. В результате сеть загружается только активным током нагрузки Iн а.
В отличие от батарей конденсаторов компенсатор может компенсировать как индуктивную (при перевозбуждении) так и емкостную (при недовозбуждении) составляющие тока.

В режиме стабилизации напряжения устанавливается ток возбуждения синхронного компенсатора чтобы ЭДС компенсатора Еf равнялась номинальному напряжению сети Ucн (рис. б). В сети имеется ток Iн, создающий падение напряжения ΔU= IнRccosφ + IнXc sinφ, где Rc и Хс — активное и индуктивное сопротивление сети; φ — угол сдвига фаз между векторами напряжения и тока сети.
Если напряжение сети понижается из-за возрастания тока нагрузки и становится меньше Ucн, то синхронный компенсатор забирает из сети реактивный опережающий ток I1 (рис. в). Это уменьшает падение напряжения на величину ΔUк= I1Xc. При повышении напряжения в сети, когда Uc > Ucн, синхронный компенсатор загружает сеть реактивным отстающим током I1 (рис. г), что приводит к увеличению падения напряжения на величину ΔUк= I1Xc. Недостаток метода - синхронный компенсатор загружает линию реактивным током, увеличивая потери в ней.
Синхронные компенсаторы выпускаются мощностью от 10 до 100 МВА и по конструкции имеют следующие отличия от синхронного двигателя:
- не имеют выходного конца вала;
- вал не передает вращающий момент и выполняется менее массивным;
- уменьшен воздушный зазор и размеры обмотки возбуждения;
- имеет более массивную магнитную систему для получения большого значения МДС;
-имеет явнополюсную конструкцию при числе полюсов 6 или 8.
Синхронный компенсатор должен быть оснащен автоматическим регулятором возбуждения, который при изменении режима напряжения в узле так регулирует его ток возбуждения, чтобы напряжение на зажимах компенсатора оставалось постоянным.
Энергетика синхронных машин
Часть мощности, потребляемой синхронной машиной, идет на компенсацию потерь, которые включают в себя:
1. Потери на возбуждение ΔРв..
2. Механические потери ΔРмех — это потери на трение в подшипниках и потери на вентиляцию. Они зависят от частоты вращения.
3. Магнитные потери ΔРст в основном имеют место в сердечнике статора, который подвергается перемагничиванию полем ротора. Они состоят из потерь на вихревые токи и перемагничивание. Потери в стали зависят от значения магнитной индукции, марки и толщины листов стали из которой набран сердечник якоря и частоты перемагничивания.
4. Электрические потери имеют место в обмотках статора 
5. Добавочные потери ΔРдоп учитывают потери на пульсацию магнитного потока, потери, вызванные поверхностным эффектом и др. Они равны 0,25 – 0,5% полезной мощности генератора
Механические и магнитные не зависят от нагрузки. Их называют постоянными. Электрические потери зависят от нагрузки машины, поэтому эти потери называются переменными.
На рисунке приведены энергетические диаграммы синхронных генераторов и двигателей при возбуждении от возбудителя (рис. а), а также от сети переменного тока (рис. а).
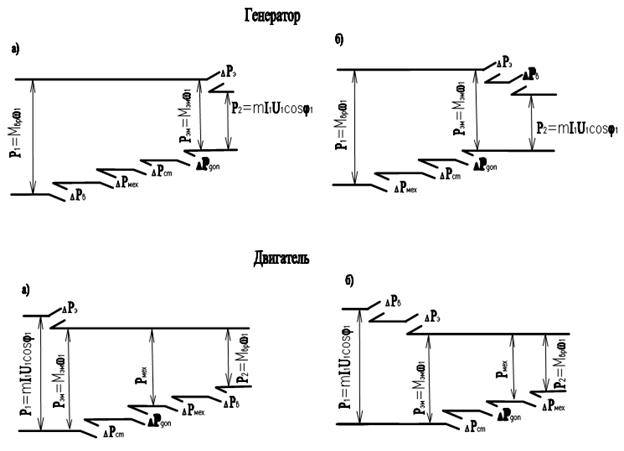
К генераторам подводится механическая мощность Р1= Мврω1, за счет которой покрываются потери холостого хода, состоящие из механических потерь ΔРмех, потерь в стали ΔРст и добавочных потерь ΔРдоп. Если возбудитель приводится от вала генератора, то потери в возбудителе и в цепи возбуждения ΔРв также покрываются за счет механической мощности. Остаток — электромагнитная мощность Рэм= Мэмω1 передается магнитным полем индуктора якорю и преобразуется в его обмотке в электрическую мощность. Часть этой мощности идет на потери в обмотке якоря ΔРэ, а остальная мощность передается на зажимы генератора и является полезной мощностью Р2 =mU1I1 cosφ1 (рис. а). Если генератор выполнен с самовозбуждением, то с его зажимов снимается мощность ΔРв, часть которой идет на потери в цепи возбуждения (рис. б), а остаток — полезная мощность Р2 отдается в сеть.
Коэффициент полезного действия:
У двигателей потребляемая мощность Р1 =mU1I1 cosφ1 поступает из электрической сети. За ее счет покрываются электрические потери ΔРэ в обмотке якоря и мощность возбуждения ΔРв при возбуждении от сети переменного тока. Оставшаяся часть преобразуется в электромагнитную мощность Рэм= Мэмω1, связанную с вращающимся магнитным полем. За счет этого поля покрываются потери в 


 стали ΔРст и добавочные потери ΔРдоп, а остальное передается ротору в виде механической мощности Рмех. Механическая мощность должна покрыть механические потери ΔРмех и мощность ΔРв, потребляемую возбудителем. Оставшаяся часть механической мощности — мощность на валу является полезной мощностью двигателя Р2= Мврω1.
стали ΔРст и добавочные потери ΔРдоп, а остальное передается ротору в виде механической мощности Рмех. Механическая мощность должна покрыть механические потери ΔРмех и мощность ΔРв, потребляемую возбудителем. Оставшаяся часть механической мощности — мощность на валу является полезной мощностью двигателя Р2= Мврω1.
Энергетические диаграммы показывают, что преобразование энергии в синхронной машине более сложно, чем это описывалось простейшими формулами и векторными диаграммами. Подключения синхронного двигателя к сети и синхронизации еще недостаточно, чтобы машина создала вращающий момент на валу - сначала должны быть покрыты потери в обмотке якоря и в стали. Если к валу генератора, синхронизированного с сетью, подведена механическая мощность, то это еще не значит, что эта машина стала отдавать в сеть электрическую мощность - генератор сначала должен покрыть потери в своей обмотке якоря.
Учет всех факторов, включая потери в стали, существенно усложняет и векторные диаграммы, и расчетные формулы. Поэтому в инженерных расчетах обычно пользуются упрощенной теорией синхронной машины, лишь по мере необходимости вводя дополнительные факторы, уточняющие и одновременно усложняющие эту теорию.
Качания синхронных машин
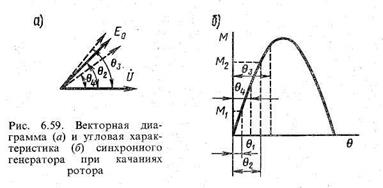
Допустим, что машина работает при некоторой нагрузке и развивает электромагнитный момент M1 =Mвн1, соответствующий углу Θ1 (рис. 6.59, а и б). Если резко увеличить внешний момент до величины Mвн2, то нагрузочный угол будет увеличиваться до величины Θ2, соответствующей новому значению электромагнитного момента M2 =Mвн2. Однако из-за инерции ротора нагрузочный угол, увеличиваясь, достигает значения Θ3 > Θ2, а затем под действием синхронизирующего момента начинает уменьшаться до величины Θ4 < Θ2. В результате возникают колебания нагрузочного угла вокруг установившегося значения Θ2, которые сопровождаются колебаниями частоты вращения ротора, называемые качаниями. Если при качаниях угол Θ превысит критическое значение, то машина выпадет из синхронизма.
 |
Собственные колебания синхронной машины называются свободными колебаниями. Частота собственных колебаний синхронных машин невелика (0,5- 2,0 Гц), что объясняется большим моментом инерции ротора. Период свободных колебаний ротора относительно синхронно вращающегося поля при параллельной работе с сетью: 
где J - момент инерции вращающихся частей;
ω - угловая скорость вращения ротора;
рс=dРЭМ/dq - удельная синхронизирующая мощность;
р – число пар полюсов машины.
При качаниях с изменением угла Θ изменяется мощность машины и ток якоря. На наличие колебаний указывают колебания стрелок амперметра и вольтметра, включенных в цепь якоря. Собственные колебания часто наблюдаются у машин, работающих параллельно с сетью, при холостом ходе.
Для уменьшения амплитуды качаний и ускорения их затухания на роторе располагается короткозамкнутая демпферная (успокоительная) обмотка. При качаниях в демпферной обмотке при изменении частоты вращения ротора индуцируется ЭДС, по ней проходит ток и возникает асинхронный демпфирующий момент: 
где D=ma/ω – коэффициент демпфирования;  .
.
Действие демпферной обмотки подобно действию механического демпфера, потери на трение в котором успокаивают колебания механизма (например, сельсина). При отсутствии демпфирования процесс колебания совершается без потерь энергии, свободные колебания становятся незатухающими, а в некоторых случаях могут даже увеличивать свою амплитуду, т. е. происходит самораскачивание синхронной машины. Из-за явления самораскачивания во многих случаях оказывается невозможной параллельная работа с сетью малонагруженных генераторов малой мощности (до10-20 кВт) без демпферной обмотки.
Колебания ротора синхронной машины могут быть вынужденными, если на него действует периодически изменяющийся внешний момент. Они возникают в синхронных генераторах, приводимых во вращение от поршневых машин, и в синхронных двигателях, служащих для привода поршневых компрессоров. Если частота вынужденных колебаний близка к частоте свободных колебаний, то возникают резонансные явления, при которых колебания угла Θ достигает больших значений и машина выпадает из синхронизма. Поэтому для уменьшения неравномерности вращающего момента на валу устанавливают маховик.
infopedia.su










