Наиболее простым, дешевым и надежным электрическим двигателем является асинхронный короткозамкнутый двигатель, поэтому его использование в регулируемом электроприводе представляет особый интерес. Как было установлено, возможности регулирования, аналогичные возможностям изменения напряжения на якоре двигателя постоянного тока с независимым возбуждением, в асинхронном электроприводе обеспечиваются путем изменения частоты напряжения и тока статорной обмотки. Для реализации этих возможностей необходимо осуществлять питание статорной обмотки двигателя от управляемого преобразователя частоты.
Регулирование частоты представляет собой технически более сложную задачу, чем регулирование выпрямленного напряжения, так как, как правило, требует дополнительных ступеней преобразования энергии.
Наибольшее число ступеней преобразования характерно для электромашинных преобразователей частоты. Для регулирования частоты вырабатываемого синхронным генератором напряжения необходимо регулировать его скорость. Для этой цели привод генератора необходимо осуществлять либо по системе Г — Д, либо по системе Т П — Д. Электромашинный преобразователь частоты содержит соответственно два преобразовательных агрегата: асинхронный двигатель, вращающий генератор постоянного тока, и двигатель постоянного тока, вращающий синхронный генератор с регулируемой скоростью. Электропривод с таким преобразователем частоты имеет пять ступеней преобразования энергии, увеличенные примерно в 5 раз массу, габариты и стоимость (по сравнению с нерегулируемым электроприводом), ухудшенный КПД, и его использование экономически нецелесообразно.
На рис. 5.9 приведена схема вентильно-элсктромашинного преобразователя частоты, в котором регулирование скорости синхронного генератора производится по системе ТП—Д. Здесь вместо электромашинного агрегата, вырабатывающего регулируемое напряжение постоянного тока, применен более экономичный тиристорный преобразователь. Однако и в этом случае преобразователь частоты содержит три ступени преобразования энергии, из них две - электромеханического преобразования. Схема непосредственного регулирования скорости по системе ТП-Д проще и дешевле, поэтому применение системы ПЧ-АД, показанной на рис. 5.9, может иметь место только в специальных установках, например в случаях, когда двигатель постоянного тока не может быть применен для привода исполнительного механизма по техническим условиям.
В § 3.11 было отмечено, что при изменении частоты необходимо регулировать напряжение или ток статорной обмотки асинхронного двигателя. В схеме на рис. 5.9 соответственно присутствуют два канала управления: канал управления частотой (Uy,ч), воздействующий на скорость синхронного генератораСГ,и канал управления напряжением, воздействующий на возбуждениеСГ (Uy.н).
Канал регулирования частоты имеет структуру системы Т П — Д (рис. 5.9) и обладает значительной инерционностью, обусловленной механической инерцией преобразовательного агрегата ПД — СГ. Канал регулирования напряжения также инерционен в связи с наличием электромагнитной инерции цепи возбуждения синхронного генератора. Поэтому как объект управления представленная на рис. 5.9 система обладает неблагоприятными свойствами.
Наименьшим числом ступеней преобразования энергии обладают вентильные преобразователи частоты. Они содержат ступень преобразования переменного тока в постоянный и ступень инвертирования. Эти две ступени в самостоятельном виде присутствуют в преобразователях частоты со звеном постоянного тока. В преобразователе частоты с непосредственной связью функции выпрямления и инвертирования совмещены в реверсивном преобразователе постоянного тока, выпрямленное напряжение или ток которого изменяются с требуемой частотой с помощью системы управления преобразователем. Как следствие, наиболее близкими к системе ТП-Д массогабаритными показателями обладает система ПЧ - АД с преобразователем с непосредственной связью, а система с преобразователями, содержащими ступень постоянного тока, уступает по этим показателям системе ТП - Д. Однако различия по мере совершенствования тиристорных преобразователей частоты постепенно сокращаются, и существенные преимущества асинхронного двигателя определяют несомненную перспективность системы ПЧ — АД.

Рис. 5.9. Схема электропривода с электромеханическим преобразователем частоты
Известно, что вентильные преобразователи частоты могут обладать либо свойствами источника напряжения, либо свойствами источника тока. В первом случае наряду со входом управления частотой uу,ч преобразователь имеет вход управления напряжениемuу,н (рис. 5.10, а). В случае инвертора тока регулирование магнитного потока машины при регулировании частоты осуществляется по входу управления токомuу,т(рис. 5.10,6).
Канал управления частотой может осуществлять либо дискретное, либо непрерывное формирование частоты напряжения и тока. При непрерывном формировании синусоидальных напряжений или токов заданной частоты его можно считать практически безынерционным. Канал управления напряжением или током воздействует на тиристорный выпрямитель, и его быстродействие может оцениваться быстродействием этого управляемого преобразователя.
Как было установлено в § 3.12, при таком управлении напряжением в схеме рис. 5.10, я или током в схеме рис. 5.106,

Рис. 5.10. Схемы асинхронного электропривода с преобразователями частоты (а, б) и векторная диаграмма (в)
которое обеспечивает постоянство потокосцепления Ψ1 = const, или при постоянстве Ψμ или Ψ 2 в пределах значений абсолютного скольженияSa<Sк уравнение механической характеристики двигателя имеет вид

В системе ПЧ - АД (рис. 5.10)

Дополнив эти уравнения уравнением движения электропривода, получим систему уравнений, которой соответствует представленная на рис. 5.11 структурная схема системы ПЧ - АД.
Параметры β и Тэ в этой структуре должны соответствовать требуемому режиму работы электромеханического преобразователя: Ψ1 == const, Ψμ = const или Ψ2 = const.
Динамические свойства системы ПЧ - АД как объекта управления менее благоприятны, чем динамические свойства регулируемых электроприводов постоянного тока, в связи с отсутствием независимого канала регулирования потока, аналогичного обмотке возбуждения двигателя с независимым возбуждением. Так, при питании от источника напряжения потокосцепления Ψ1, Ψμ, и Ψ2; сложно зависят от напряжения U1, частотыf1 и абсолютного скольженияSа
Для поддержания потока на заданном уровне при этих условиях необходимо регулирование его либо по отклонению, либо по принципу компенсации. В последнем случае управление напряжением Uу,н (рис. 5.10,а) илиUу,т (рис. 5.10,6) реализуется на основе известной взаимосвязи между Ψ1, Ψμ, или Ψ2, управляющими воздействиями U1 илиI1и возмущающими факторамиf1 иSa.
Взаимосвязь U1 и Ψ1можно определить с помощью уравнений электрического равновесия, записанных в векторной форме для статического режима в осяхх, у,и представить в виде

Зависимость (5.17а) позволяет для текущих значений частоты и абсолютного скольжения определять значения напряжения l/i, которые в статическом режиме работы соответствуют условию
Ψ1 =const. Она используется для формирования структуры функционального преобразователя, управляющего напряжением преобразователя частоты в процессе работы электропривода.
В динамических режимах изменениям момента двигателя соответствуют изменения угла между вектором напряжения U1 или тока_ статора I1 и вектором намагничивающего тока машины Iμ (см. рис. 3.27, в и 3.40, б).При неизменной фазе вектораu1 (илиi1 при питании от источника тока) изменения указанного угла реализуются за счет соответствующих перемещений ротора, и вследствие механической инерции возникают несоответствия, нарушающие выполнение условия |Ψ1| =const. Изменения основного потока машины вызывают проявления электромагнитной инерции, и динамические свойства электропривода как объекта управления существенно ухудшаются. Сравнивая векторные диаграммы на рис. 3.27, в и 3.40,б, можно установить, что при частотно-токовом управлении, когда преобразователь частоты обладает свойствами источника тока |i1 | =const, изменения угла между управляющим вектором и вектором намагничивающего тока наиболее значительны. При этом для поддержания постоянства потока в динамике необходимо не только изменять амплитуду, но и корректировать фазу вектора тока статора.
Для определения необходимых для такого управления количественных связей запишем уравнения механической характеристики в осях x,y(ωк=ω0 эл)

Рис. 5.11. Структурная схема линеаризованной системы ПЧ – АД
Уравнения потокосцспления ротора

Поставив цель поддерживать постоянным вектор потокосцепления ротора Ψ2 совместим его с осью х,при этом Ψ2x= Ψ2max Ψ2y= 0, и из уравнений потокосцепления получим

Подставляя эти соотношения и значения 
 в уравнения механической характеристики, получаем
в уравнения механической характеристики, получаем

Векторная диаграмма, соответствующая полученным соотношениям, приведена на рис. 5.10, в.Она показывает, что составляющая i1x вектора тока статора является намагничивающим током и при ψ2 =const,i1x=const. Составляющаяi1yпредставляет собой активный ток, которому при ψ2 == const пропорционален момент двигателя. С помощью векторной диаграммы определим искомые соотношения, позволяющие обеспечить условие ψ2= const в динамических процессах:

Следовательно, при частотно-токовом управлении электроприводом система управления преобразователем должна обеспечивать возможность формирования первой гармоники тока статора для поддержания ψ2 = const в соответствии с (5.176) и (5.17в):

Поэтому показанный на рис. 5.10, бинвертор тока ПЧ(ИТ} снабжен кроме входов управления амплитудойUу.т и частотой токаUу,ч также входом управления фазой токаUу,ф Уравнение механической характеристики

При идеальном поддержании ψ2 = const электромагнитная постоянная Tэ в структуре на рис. 5.11 равна нулю. Однако практически в связи с неточностями компенсации возможные проявления электромагнитной инерции следует учитывать малой не компенсируемой постоянной Тэ
Значение Тэ при ψ1 = constопределяется по (3.89). Этим же
соотношением можно пользоваться при ψμ= const, подставляя
вместо Xк значение X`2
Однако следует отметить, что внимания заслуживают и такие законы управления, которые обеспечивают снижение потерь энергии, выделяющихся в двигателе. В частности, управление, близкое к оптимальному по критерию минимума потерь, осуществляется при поддержании абсолютного скольжения, равного критическому при всех нагрузках: Sа =Sк =const. Этому условию при каждом моменте М соответствуют наименьшие значения тока статораIi= /iminпри М =const.
При использовании такого управления следует учитывать, что при уменьшении нагрузки от Мном до 0 снижение потерь достигается из-за уменьшения тока намагничивания Iμ, т. е. потока машины Фμ. А это означает, что при управлении приSа =Sк =constосновной поток изменяется в широких пределах, что приводит к сильному влиянию электромагнитной инерции, существенно снижающему быстродействие при регулировании координат.
Коэффициент полезного действия системы ПЧ — АД с вентильным преобразователем несколько ниже, чем в системе ТП — Д, если имеется звено постоянного тока, так как при этом преобразование напряжения и тока осуществляется дважды.
Однако и в этом случае в связи с малыми потерями энергии в тиристорах он остается достаточно высоким.
Коэффициент мощности в этой системе близок к значению коэффициента мощности в системе ТП - Д, если в качестве звена постоянного тока используется тиристорный преобразователь. Он достаточно высок только в системах с неуправляемым выпрямителем, однако при этом отсутствует возможность рекуперации энергии в сеть в тормозных режимах электропривода. Использование режимов рекуперации энергии может существенно снижать потребление энергии установкой за цикл работы, поэтому при сравнении вариантов системы этот фактор необходимо учитывать.
studfiles.net
Существующие вентильные (полупроводниковые) преобразователи частоты можно разделить на две группы:
1 – преобразователи с непосредственной связью питающей сети и нагрузки, сокращенно НПЧ;
2 – преобразователи частоты с промежуточным звеном постоянного тока.
Преобразователь частоты с непосредственной связью включается в статорную цепь асинхронного двигателя и служит для преобразования напряжения стандартной частоты в регулируемое в определенных пределах напряжение по величине и частоте.
Преобразователи частоты с непосредственной связью обычно представляют собой три согласованно работающих реверсивных тиристорных преобразователя постоянного тока. Схема непосредственного преобразователя частоты представлена на рис.6.7.
Каждая фаза асинхронного двигателя питается от своего реверсивного преобразователя. Напряжение, прикладываемое к обмотке статора, будет равно:
 .
.
где: Uс – напряжение питающей сети.
Если угол регулирования α устанавливать в соответствии с текущим значением частоты, например,

и поддерживать неизменным в течение одного полупериода выходной частоты преобразователя, а в течение второй полуволны переключать группы вентилей преобразователя с углом управления  , то получим переменное напряжение прямо-угольной формы заданной частоты. Сдвинув моменты включения преобразователей, питающих фазы В и С двигателя соответственно на
, то получим переменное напряжение прямо-угольной формы заданной частоты. Сдвинув моменты включения преобразователей, питающих фазы В и С двигателя соответственно на и
и , получим трехфазную систему напряжений прямоугольной формы заданной частоты и соответствующей ей амплитуды напряжения (рис.6.8).
, получим трехфазную систему напряжений прямоугольной формы заданной частоты и соответствующей ей амплитуды напряжения (рис.6.8).
Если величину αв и αн в течение каждого полупериода заданной частоты регулировать по арккосинусоидальному закону

где:  , то среднее значения фазных напряжений будут иметь синусоидальную форму
, то среднее значения фазных напряжений будут иметь синусоидальную форму
 .
.
Для получения приемлемой формы выходного напряжения частота напряжения питающей сети должна быть в несколько раз выше частоты выходного напряжения.
Преобразователи частоты с непосредственной связью по схеме рис.6.7 дают возможность при частоте питания 50 Гц получать выходную частоту в пределах 0-20 Гц. Поэтому асинхронные электроприводы данного типа чаще всего применяются для тихоходных безредукторных электроприводов средней и большой мощности.
Основным достоинством преобразователей частоты с непосредственной связью является естественная коммутация вентилей под действием напряжения питающей сети, как это происходит в управляемых тиристорных преобразователях (выпрямителях), используемых в приводе постоянного тока. Благодаря возможности перевода преобразователя из выпрямительного в инверторный режим, в рассматриваемых схемах возможно торможение асинхронного двигателя с отдачей энергии торможения в сеть (рекуперативное торможение). Механические характеристики асинхронного электропривода с преобразователем частоты с непосредственной связью показаны на рис.6.9.
В этой системе используются преобразователи частоты с промежуточной цепью постоянного тока. Схема такого преобразователя представлена на рис.6.10.
Переменное напряжение промышленной сети сначала выпрямляется посредством регулируемого или нерегулируемого выпрямителя UD, а затем подается на автономный инвертор, преобразующий постоянное напряжение (или ток) в напряжение (или ток) регулируемой частоты и величины.
Регулирование величины напряжения (или тока) промежуточного звена постоянного тока может производиться управляемым выпрямителем UD, либо (в инверторах напряжения) в качестве первого звена используется неуправляемый выпрямитель, а регулирование напряжения осуществляется инвертором методом широтно-импульсной модуляции. В первом случае функции управления четко разделены: выпрямитель управляет величиной тока или напряжения, а инвертор – значением выходной частоты преобразователя. Во втором случае обе этих функции возлагаются на инвертор.
Важным узлом преобразователей с промежуточным звеном постоянного тока является фильтр F. Этот фильтр выполняет две функции: сглаживает пульсации выпрямленного напряжения (или тока) и служит устройством для накопления и отдачи энергии, что необходимо для обеспечения циркуляции реактивной мощности между обмотками асинхронного двигателя и фильтром. Поскольку на входе преобразователя установлен полупроводниковый выпрямитель, то циркуляция реактивной мощности между асинхронным двигателем и сетью невозможна.
Преобразователи частоты по типу автономного инвертора, используемые в электроприводах, позволяют получать выходную частоту от долей герца до нескольких сотен Гц. Верхний предел ограничивается возможной частотой коммутации вентилей инвертора, нижний – качеством выходного напряжения или тока; при несинусоидальной форме тока в обмотках двигателя при малых частотах нарушается равномерность вращения ротора.
При частотно-токовом управлении асинхронным двигателем применяются автономные инверторы тока (см. рис.6.11). Отличительной особенностью этих инверторов является наличие мощного дросселя (индуктивного фильтра L) в цепи постоянного тока и отсутствие обратных диодов в мостовой схеме инвертора. Для коммутации тиристоров используются коммутирующие конденсаторы С. Переключение тиристоров VS1÷VS6 производится в порядке возрастания их номеров. Принцип коммутации состоит в следующем (см. рис.6.11). Пусть открыты тиристоры VS1 и VS2. Ток проходит через фазы двигателя «а» и «с». Конденсатор С13 заряжен с положительным зарядом на верхней обкладке. При подаче отпирающего импульса на тиристор VS3 он открывается, и образуется короткозамкнутый контур С13-VS1-VS3-C13, по которому происходит перезаряд конденсатора С13. Под действием тока перезаряда тиристор VS1 закроется, и ток далее будет протекать через тиристор VS3, фазы «в» и «с» двигателя и тиристор VS2. Полярность заряда конденсатора С13 изменится на обратную. Затем открывается тиристор VS4 и ток переходит с фазы «с» на фазу «а» (в обратном направлении) и т.д. За время периода заданной частоты происходит 6 коммутаций тиристоров, в результате чего по обмоткам статора двигателя будет протекать трехфазный переменный ток заданной частоты.
Величина тока контролируется регулятором тока РТ, в соответствии с выходным сигналом которого изменяется угол управления тиристорами и на выходе выпрямителя UD устанавливается необходимая величина выпрямленного напряжения. Выходная частота преобразователя определяется блоком управления вентилями инвертора БУИ в соответствии с заданием частоты.
Достоинствами инвертора тока являются относительная простота схемы, возможность ее реализации на тиристорах, что позволяет выполнять преобразователи на большую мощность и высокое напряжение. В приводах с инвертором тока возможен режим рекуперативного торможения. Для этого, не изменяя направление тока в звене постоянного тока, управляемый выпрямитель переводится в инверторный режим (угол α устанавливается больше π/2).
Недостатками инверторов тока является несинусоидальная форма тока в обмотках статора, а также невозможность питания от одного преобразователя нескольких асинхронных двигателей. Из-за несинусоидальности формы тока при f1<5 Гц теряется равномерность вращения ротора, что ограничивает диапазон регулирования скорости электропривода по схеме рис.6.11.
В настоящее время большинство преобразователей изготавливаются по схеме автономного инвертора напряжения. Это связано с появлением полностью управляемых силовых полупроводниковых приборов: IGB – транзисторов и запираемых тиристоров. Типичная схема электропривода с инвертором напряжения на полностью управляемых приборах дана на рис.6.12. Схемной особенностью инвертора напряжения является наличие обратных диодов VD1-VD6 и фильтрового конденсатора С.
В отличие от инверторов тока, для которых характерным является работа в каждый момент времени по одному вентилю в анодной и катодной группах, в инверторах напряжения более целесообразна одновременная работа двух вентилей в одной группе и одного в другой. При этом продолжительность работы каждого вентиля составляет π. Допустим, что в некоторый момент времени работают транзисторные ключи VT1, VT2 и VT6. Тогда ток протекает по всем трем фазным обмоткам двигателя, причем 2/3 напряжения Ud прикладывается к фазе «а» и к двум параллельно включенным фазам «в» и «с» (см. рис.6.13). При запирании ключа VT6 и включении ключа VT3 ток в фазе «в» не может мгновенно измениться и замыкается через диод VD3 на конденсатор С, чем обеспечивается циркуляция реактивной мощности между обмотками двигателя и конденсатором С. После включения ключа VT4 ток будет протекать по параллельно включенным фазам «а» и «с» и по фазе «в» и т.д. Линейное фазное напряжение, прикладываемое к обмоткам двигателя, будет иметь форму, показанную на рис.6.13.
Требуемая выходная частота определяется частотой переключения вентилей инвертора и задается каналом регулирования частоты. Регулирование величины выходного напряжения может производиться двумя способами:
использованием управляемого выпрямителя на входе инвертора, с помощью которого регулируется величина Ud;
использованием способа широтно-импульсного регулирования, осуществляемого вентилями инвертора; в этом случае входной выпрямитель может быть неуправляемым.
Первый способ характеризуется двумя недостатками: ступенчатой формой выходного напряжения (см. рис.6.13) и низким коэффициентом мощности преобразователя.
Более современным является второй способ. При широтно-импульсном способе регулирования возможно не только регулирование средней величины напряжения за период, но и коррекция формы выходного напряжения. Такое регулирование называется широтно-импульсной модуляцией (ШИМ), которая основана на принципе широтно-импульсного регулирования (см. раздел 5.4). Принцип широтно-импульсной модуляции синусоидального напряжения поясняется рис.6.14.
Так как для двуполярной коммутации
 ,
,
то, регулируя непрерывно скважность по синусоидальному закону,  можно получить среднее фазное напряжение, также изменяющееся по синусоиде.
можно получить среднее фазное напряжение, также изменяющееся по синусоиде.
Изменяя с помощью системы управления амплитуду U1* и угловую частоту  , можно производить регулирование частоты и величины выходного напряжения преобразователя.
, можно производить регулирование частоты и величины выходного напряжения преобразователя.
При использовании инверторов напряжения для реализации режима рекуперативного торможения асинхронного двигателя необходимо на входе устанавливать реверсивный преобразователь с двумя группами вентилей, что усложняет схему преобразователя и снижает ее надежность. Поэтому в инверторах напряжения обычно предусматривают разрядное сопротивление R (см. рис.6.12), которое подключается в режиме торможения транзистором VT7 и в котором рассеивается энергия торможения.
Существует большое число разновидностей схем преобразователей частоты с автономными инверторами тока и напряжения, которые рассматриваются в литературе по преобразовательной технике.
studfiles.net
Иногда наши Заказчики спрашивают, могут ли асинхронные двигатели общепромышленного применения работь с преобразователями частоты. Технические условия завода-изготовителя не предусматривают испытания стандартного асинхронного двигателя при питании его от преобразователя частоты, поэтому Международным электротехническим комитетом был принят стандарт МЭК 34-17 «Асинхронные двигатели с короткозамкнутым ротором, которые питаются от преобразователей частоты». Первая редакция стандарта была выпущена в 1992 году, вторая в 1998 году. В первой редакции МЭК 34-17 были введены дополнительные проверки, которые состоят из трех групп:
• 1 группа - Общая проверка двигателя при питании от преобразователя частоты;• 2 группа - Проверка двигателя при частоте вращения ротора выше номинальной, при питании от преобразователя частоты;• 3 группа - Проверка двигателя при частоте вращения ротора ниже номинальной, при питании от преобразователя частоты.
Проверки должны проводиться на заводе-изготовителе электродвигателей или на заводе-изготовителе преобразователей частоты по требованию заказчика. Что вынуждает проводить эти проверки?
1. Выходное напряжение преобразователя частоты имеет форму ШИМ - сигнала, а кабель, соединяющий преобразователь частоты и двигатель, может иметь длину 100 м. и более. Если волновое сопротивление кабеля и обмотки двигателя не согласованы, а скорость нарастания выходного напряжения dU/dt высокая, то происходит отражение волны напряжения в оба конца кабеля. Это отражение увеличивает пики напряжения на клеммах двигателя, что может привести к пробою изоляции. Некоторые заводы-изготовители преобразователей частоты проводят их проверку с двигателями общепромышленного применения, и обязательно указывают максимально допустимую длину кабеля. При выборе преобразователя частоты на этот параметр необходимо обратить особое внимание, так как возможное разочарование может длиться намного дольше, чем удовольствие от низкой цены!
Такой подход привел к созданию специальных алгоритмов управления, которые позволяют без ограничений использовать асинхронные двигатели общепромышленного применения с длиной кабеля между преобразователем частоты и двигателем до 300 м. А если возникнет необходимость в установке двигателя на еще большее расстояние, или двигатель имеет повышенные требования к нагрузке изоляции? В таких случаях используют выходные фильтры dU/dt, или выходные LC - фильтры (синусные фильтры). Компания Юг-привод поставляет такие фильтры, разработанные специально для преобразователей частоты.
2. Некоторые приводные механизмы при регулировании скорости могут войти в механический резонанс. Во избежание проблем механического резонанса необходимо просто пропустить частоты, на которых возникает резонанс,
3. Скорость вращения двигателя при частотном регулировании может значительно отличаться от номинальной скорости. При работе двигателя на скоростях выше номинальной она не должна превышать 1-ю критическую частоту вращения стандартного двигателя, даже в случае жесткого соединения с нагрузкой на валу. Гарантийный резерв - не меньше 25% от критической частоты вращения. Невыполнение этого условия приводит к уменьшению ресурса работы подшипников двигателя, или к аварийной остановке. Допустимая максимальная частота вращения для стандартных двигателей зависит от их типоразмера и приведена в таблице.
| Типоразмер (высота оси вращения, мм) | Допустимая максимальная частота вращения, об/мин |
| 63-100 | 6000 |
| 112-200 | 4500 |
| 225-280 | 3600 |
| 315 (2 полюса) | 3600 |
| 315 – другие | 3000 |
| 355, 400 (2 полюса) | 3600 |
| 355, 400 – другие | 2500 |
При уменьшении частоты вращения ротора асинхронного короткозамкнутого самовентилируемого двигателя ниже номинальной, производительность вентилятора, закрепленного на роторе, также уменьшается, что ухудшает условия охлаждения двигателя и может привести к повышению температуры обмоток статора и подшипников. Это необходимо учитывать при проектировании частотно-регулируемого электропривода и обеспечить принудительную вентиляцию электродвигателя. Практика эксплуатации частотно-регулируемого электропривода систем вентиляции, водоснабжения и т.п. свидетельствует о том, что при вентиляторной характеристике нагрузки на низких скоростях двигатель не перегревается, так как при уменьшении скорости уменьшается и момент, а соответственно и ток двигателя.
yug-privod.ru
Возможность частотного регулирования скорости асинхронного двигателя-регулирование путем изменения частоты питающего напряжения – вытекает из того обстоятельства, что скорость вращения электромагнитного поля статора пропорциональна частоте питающего напряжения
 (6.2)
(6.2)
Следует также учесть, что поскольку с изменением частоты питающего напряжения изменяется и величина потока двигателя Ф1
 (6.3)
(6.3)
то в большинстве случаев одновременно с изменением частоты питающего напряжения необходимо регулировать и его амплитуду. Необходимость регулирования напряжения при уменьшении частоты вниз от номинальной связана с тем, что из-за уменьшения индивидуального сопротивления обмоток двигателя ток намагничивания будет возрастать, что приведет к насыщению магнитопровода двигателя и его перегреву. Регулирование напряжения следует производить таким образом, чтобы скольжение двигателя было минимальным.

Рис.6.2. Схема включения асинхронного двигателя с питанием
от преобразователя частоты
Для реализации способа частотного регулирования асинхронный короткозамкнутый двигатель включается в питающую сеть с параметрами Uc и fcчерез преобразователь частотыUF(см.рис.6.2). В качестве преобразователей частоты в настоящее время используются, в основном, полупроводниковые преобразователи частоты.
Существующие вентильные регулирование скорости изменением частоты реализуется с помощью полупроводниковых преобразователей частоты которые можно разделить на две группы:
1 – преобразователи с непосредственной связью питающей сети и нагрузки, сокращенно НПЧ;
2 – преобразователи частоты с промежуточным звеном постоянного тока.
Преобразователь частоты с непосредственной связью включается в статорную цепь асинхронного двигателя и служит для преобразования напряжения стандартной частоты в регулируемое в определенных пределах напряжение по величине и частоте.
Преобразователи частоты с непосредственной связью обычно представляют собой три согласованно работающих реверсивных тиристорных преобразователя постоянного тока. Блок схема непосредственного преобразователя частоты представлена на рис.6.7.

Рис.6.7. Блок-схема преобразователя частоты с непосредственной связью
Каждая фаза асинхронного двигателя питается от своего реверсивного преобразователя.
Преобразователи частоты с непосредственной связью по схеме рис.6.7 дают возможность при частоте питания 50Гц получать выходную частоту в пределах 0-20Гц. Поэтому асинхронные электроприводы данного типа чаще всего применяются для тихоходных безредукторных электроприводов средней и большой мощности.
Основным достоинством преобразователей частоты с непосредственной связью является естественная коммутация вентилей под действием напряжения питающей сети, как это происходит в управляемых тиристорных преобразователях (выпрямителях), используемых в приводе постоянного тока. Благодаря возможности перевода преобразователя из выпрямительного в инверторный режим, в рассматриваемых схемах возможно торможение асинхронного двигателя с отдачей энергии торможения в сеть (рекуперативное торможение). Механические характеристики асинхронного электропривода с преобразователем частоты с непосредственной связью показаны на рис.6.9.

Рис.6.9. Механические характеристики электропривода НПЧ-АД
studfiles.net
С помощью формулы для момента асинхронной машины строим естественную механическую характеристику привода для номинальных значений напряжения и частоты. На этом же графике строится нагрузочная характеристика механизма.


Определив параметры естественной механической характеристики строим график зависимости моментов от угловых скоростей:
3.3 Механическая характеристика при экстренном торможении
Экстренное торможение осуществляется в режиме динамического торможения, при котором в обмотку статора - например на зажимы А и ВС, соединенные вместе, подается постоянный ток. Предварительно необходимо задаться кратностью тока динамического торможения Idt по отношению к номинальномуКid = Idt / In , которую выбирают в интервале 1.8 – 2.2 ( например Кid = 2) и рассчитать величину тормозного тока, величину эквивалентного тока Ie и добавочного сопротивления

4. Оценка необходимости применения обратной связи по скорости

5. Определение среднего КПД системы
Средний КПД электропривода определяется как произведение КПД двигателя, преобразователя частоты и исполнительного механизма: ср = д. пч. m .

6. Переходные процессы в электроприводе
Анализ переходных процессов выполняется с помощью программы Matlab. В среде Matlab собрали модель (рис.9), задали требуемые параметры(рис.10) ее элементов и выполнить расчет переходного процесса для случая частотного пуска ненагруженного двигателя с последующим 100% увеличением нагрузки.
Блок Step осуществляет скачкообразный наброс нагрузки по окончании пуска.
Широтно-импульсный преобразователь вырабатывает переменную частоту, при частоте треугольной волны модуляции обычно выбираемой в диапазоне 1500-3000 Гц.
Амплитуда напряжения задается блоками RelayA, RelayB и Relay С, и равна 220√2.
Связь блоков Simulink и PSB осуществляется через управляемые источники напряжения ControlledVoltageSourceVao, Vbo и Vco.
Основной особенностью данной модели является возможность наблюдать работу асинхронного короткозамкнутого двигателя от преобразователя частоты, который изменяет одновременно как напряжение, так и частоту, в соответствии с заданными законами.
Изменение напряжения и частоты в функции времени задается блоками Fcn и Fcn1, соответственно. На их входы подается время, а выходы определяют напряжение и частоту (в относительных единицах), подводимые к двигателю.
Обычно несколько лучшие результаты (с точки зрения сокращения времени пуска при допустимых бросках тока и момента) получаются, если скорость возрастания напряжения немного больше скорости возрастания частоты.
Зависимости напряжения v(t) и частоты f(t) (в о.е.) от времени t при пуске могут быть приняты линейными c ограничениями ( которые реализуются с помощью блоков saturation)
v(u) = kv.u; f(u) = kf.u, при ограничениях v(u) <1 и f(u) <1,
экспоненциальными с одной постоянной времени Т
v(u) = f(u) = 1- .exp(-.u/T),
или экспоненциальными с двумя (близкими по величине) постоянными времени Т1 и Т2 (Т1>Т2),
что при правильном выборе постоянных времени Т1 и Т2 дает, при несколько увеличенном времени пуска, минимальные броски тока и момента.
Здесь во всех формулах вместо времени t подставлена u – стандартная входная переменная блока Fcn. Экспоненциальный характер изменения v(t) и f(t) для Т=0.2 (экран Scopev*,f*) показан на рис.11. Одновременно на экране ScopeVabm можно видеть характер изменения напряжения, приложенного к статорной обмотке двигателя во время пуска (рис.12).
Промоделируем систему без наброса нагрузки чтобы оценить параметры переходного процесса по скорости(рис 15):
Установившася скорость ωуст =157,5
Время 1го согласования t1 =0.59c
Время переходного процесса τр =1,03с
Перерегулирование

Изменяя параметры модели, проследим их влияние пусковые параметры, такие как время пуска и пусковые броски тока и момента.
Увеличив в полтора раза момент нагрузки и момент инерции, моделируя тем самым незапланированный наброс дополнительной нагрузки на вал двигателя проследим переходные процессы скорости ω(t) и момента Te(t), а также графики токов статора is(t) и ротора ir(t) при частотном пуске(рис16, 17).
Из графиков(рис16, 17) видно, что повышение момента инерции и величины нагрузки негативно влияют на пульсацию, и амплитуду роторных и статорных токов, а так же увеличивает время переходных процессов. Однако выбранный двигатель справляется с нагрузкой. Таким образом можно считать допустимым не продолжительное увеличение нагрузки. Так как амплитуда тока превышает ток теплового расцепления автомата, длительная работа в данном режиме не предусмотрена.
Обычно несколько лучшие результаты (с точки зрения сокращения времени пуска при допустимых бросках тока и момента) получаются, если скорость возрастания напряжения немного больше скорости возрастания частоты. По этому в исходной модели увеличим скорость изменения напряжения на 50%(рис.18, 19, 20) и проанализируем основные параметры пуска(рис.21, 22)
Промоделируем систему без наброса нагрузки чтобы оценить параметры переходного процесса по скорости(рис 23):
Установившася скорость ωуст =157,5
Время 1го согласования t1 =0.43c
Время переходного процесса τр =1,04с
Перерегулирование

Таким образом при увеличении скорости изменения напряжения мы значительно уменьшаем время первого согласования по скорости и время пусковых токов статора и ротора. Следовательно мы можем уменьшить время наброса нагрузки с 1 до 0,6с. При этом значение перерегулирования по скорости не превышает 20%, а величина пусковых токов не превышает номинальные, что положительно сказывается на эксплуатационных характеристиках двигателя.
Вывод
Мы приобрели навыки для решения инженерных задач по расчету и проектированию систем автоматизированного электропривода в статических и динамических режимах, а так же навыков расчета параметров в программном пакете Mathcad и моделирования в программном пакете MatlabSimulink системы электропривода «преобразователь частоты-асинхронный двигатель».
В ходе разработки электропривода мы достигли диапазона регулирования скорости от 30 до 300 рад/с.
В процессе моделирования при разных параметрах системы мы проследили переходные процессы и дали им характеристику. Мы так же сделали следующие выводы:
· Повышение момента инерции и величины нагрузки негативно влияют на пульсацию, и амплитуду роторных и статорных токов, а так же увеличивает время переходных процессов. Однако выбранный двигатель справляется с нагрузкой. Таким образом можно считать допустимым не продолжительное увеличение нагрузки. Так как амплитуда тока превышает ток теплового расцепления автомата, длительная работа в данном режиме не предусмотрена.
· При увеличении скорости изменения напряжения мы значительно уменьшаем время первого согласования по скорости и время пусковых токов статора и ротора. Следовательно мы можем уменьшить время наброса нагрузки с 1 до 0,6с. При этом значение перерегулирования по скорости не превышает 20%, а величина пусковых токов не превышает номинальные, что положительно сказывается на эксплуатационных характеристиках двигателя.
Для достижения минимального времени пуска нужно увеличивать скорость изменения частоты и напряжения и уменьшить момент инерции. При этом необходимо следить за пульсацией и амплитудами токов статора и ротора.
Список литературы
1. Методические указания к курсовому проекту «Электропривод по схеме преобразователь частоты - асинхронный двигатель»
2. Конспект лекций по курсу «Элементы и системы автоматизированного управления»
3. Методические указания к лабораторным работам по курсу «Элементы и системы автоматизированного управления»
mirznanii.com
Теория электропривода
Преобразователь 220-380 инвертор
Как уже отмечалось ранее, в качестве преобразователя частоты могут использоваться электромашинные и статические (тиристорные или транзисторные) преобразователи. В первом случае регулируемые АД питаются от синхронного генератора СГ, приводимого во вращение двигателем постоянного тока независимого возбуждения, который, в свою очередь, получает питание от генератора постоянного тока или от ТП. Иначе говоря, привод СГ осуществляется либо по системе ГД, либо по системе ТП-Д. В качестве электромашинных преобразователей частоты применяются и асинхронные преобразователи, вращаемые асинхронным двигателем (для питания электропил в лесной промышленности).
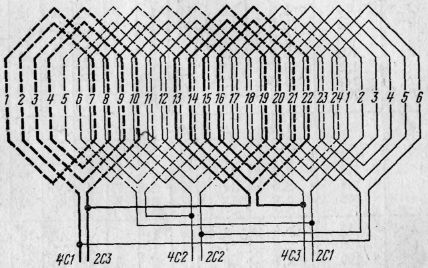
") Схема регулирования скорости СГ, а следовательно, и частоты, по системе ТП-Д проще и дешевле, чем по системе ГД, т. к. в этом случае меньше число ступеней преобразования энергии. В качестве примера на рис. изображена схема одновременного частотного регулирования ряда АД, которые получают питание от СГ, скорость которого, следовательно, частота выходного напряжения, регулируется по системе ТП-Д. Такая схема применяется, в тех случаях, когда требуется одновременно синхронно изменять скорость ряда к. з. АД, в частотности, для питания двигателей рольгангов прокатного стана. В этой схеме обеспечивается закон пропорционального регулирования, т. е.
Схема регулирования скорости СГ, а следовательно, и частоты, по системе ТП-Д проще и дешевле, чем по системе ГД, т. к. в этом случае меньше число ступеней преобразования энергии. В качестве примера на рис. изображена схема одновременного частотного регулирования ряда АД, которые получают питание от СГ, скорость которого, следовательно, частота выходного напряжения, регулируется по системе ТП-Д. Такая схема применяется, в тех случаях, когда требуется одновременно синхронно изменять скорость ряда к. з. АД, в частотности, для питания двигателей рольгангов прокатного стана. В этой схеме обеспечивается закон пропорционального регулирования, т. е. ") .
.
Схема имеет два канала управления: канал управления частотой, воздействующий на скорость СГ и канал управления напряжением, воздействующий на возбуждение СГ. Первый канал имеет структуру системы ТП-Д и обладает значительной инерционностью, обусловленной механической инерцией агрегата (ДПТ-СГ). Второй канал также инерционен в связи с наличием электромагнитной инерции цепи возбуждения СГ.
Более совершенными являются системы со статическими преобразователями частоты. В этих системах в самом преобразователе только две ступени преобразования энергии – ступень преобразования переменного тока в постоянный и ступень инвертирования. Эти две ступени в самостоятельном виде присутствуют в ПЧ со звеном постоянного тока (см. рис.), а в НПЧ функции выпрямления и инвертирования совмещены в реверсивном преобразователе постоянного тока, выпрямленное напряжение которого изменяется системой управления. Принципиальная схема привода с НПЧ изображена на рис. Как известно, ") Тиристорный преобразователь частоты (ТПЧ) может обладать либо свойствами источника напряжения (АИН), либо источника тока (АИТ). В первом случае преобразователь имеет канал управления напряжением и канал управления частотой. Во втором случае ТПЧ кроме канала управления частотой имеет канал управления током. Канал управления частотой можно считать практически безинерционным. Канал управления напряжением или током воздействует на УВ и его быстродействие определяется быстродействием выпрямителя.
Тиристорный преобразователь частоты (ТПЧ) может обладать либо свойствами источника напряжения (АИН), либо источника тока (АИТ). В первом случае преобразователь имеет канал управления напряжением и канал управления частотой. Во втором случае ТПЧ кроме канала управления частотой имеет канал управления током. Канал управления частотой можно считать практически безинерционным. Канал управления напряжением или током воздействует на УВ и его быстродействие определяется быстродействием выпрямителя.
При частотном управлении, при котором обеспечиваются законы YS=const, Ym=const, Yr=const в пределах абсолютных скольжений Sa<<Skp уравнение динамической механической характеристики двигателя в операторной форме имеет вид:
") |
") , где
, где ")
Дополнив эти уравнения уравнением движения электропривода при жестких механических связях, получим структурную схему системы ПЧ-АД, которая изображена на рис.
Динамические свойства системы ПЧ-АД как объекта управления хуже, чем свойства регулируемых электроприводов постоянного тока в связи с отсутствием независимого канала регулирования потока, аналогичного обмотке возбуждения ДНВ. Так, при питании от АИН потокосцепления Y1, Ym, и Y2 сложно зависят от U, f, и Sa, что было видно при рассмотрении вопроса о статических характеристиках АД при частотном управлении.
КПД системы ПЧ-АД с тиристорным преобразователем, имеющим звено постоянного тока, несколько ниже, чем в системе ТП-Д из-за двойного преобразования энергии. Cosj близок к значению коэффициента мощности системы ТП-Д если в качестве звена постоянного тока используется ТП. Наиболее близкими к системе ТП-Д по массогабаритным показателям обладает система с НПЧ.
Производим и продаем частотные преобразователи: Цены на преобразователи частоты(21.01.16г.): Частотники одна фаза в три: Модель Мощность Цена CFM110 0.25кВт 2300грн CFM110 0.37кВт 2400грн CFM110 0.55кВт 2500грн CFM210 1,0 кВт 3200грн …
В большинстве случаев к. з. АД питается от сети с U1=const и f1=const. Поэтому нелинейность их механических характеристик проявляется полностью как в режимах пуска, так и торможения. Магнитный поток в …
Обычно ДНВ работает при Ф=Фн если U=const или U=var. Необходимость ослабления потока возникает когда требуется получить скорость, превышающую основную (согласно требованиям технологического процесса ). Если бы поток изменялся мгновенно, то …
msd.com.ua