





Полезная модель относится к электротехнике и может быть использована в различных отраслях промышленности, сельском и жилищно-коммунальном хозяйстве для управления асинхронным двигателем. Технический результат полезной модели заключается в повышении КПД работы устройства при нагрузках, значительно ниже номинальных; стабилизации вырабатываемого момента и обеспечение надежной работы устройства во всем диапазоне изменения нагрузки; увеличение срока эксплуатации электродвигателя. Система управления тиристорной станцией управления асинхронным двигателем, включающая блок задания, блок управления, блок датчиков, систему автоматического регулирования, систему импульсно-фазового управления, блок тиристорных ключей, причем выход блока задания соединен с первым входом блока управления, второй вход блока управления соединен с датчиками, выход блока управления соединен со входом системы автоматического регулирования, выход которого соединен со входом системы импульсно-фазового управления, выход которой соединен со входом блока тиристорных ключей, отличающаяся тем, что в систему управления дополнительно введены устройство суммирования напряжения, управляемый дифференциал, генератор, использованы датчики напряжения фаз и датчик крутящего момента, причем выход блока тиристорных ключей соединен с первым входом устройства суммирования напряжения, второй вход устройства суммирования соединен с выходом генератора, выход устройства суммирования напряжения соединен со входом асинхронного двигателя, выход асинхронного двигателя соединен со входом управляемого дифференциала, один из выходов дифференциала соединен со входом генератора, а другой выход - с нагрузкой.
Полезная модель относится к электротехнике и может быть использована в различных отраслях промышленности, сельском и жилищно-коммунальном хозяйстве для управления асинхронным двигателем.
Известно устройство управления трехфазным асинхронным двигателем, включающее силовой тиристорный блок, отличающееся тем, что устройство снабжено ключом управления, выход которого соединен с входом системы блокировок релейного типа, выход которой соединен с входом силового тиристорного блока, выход которого соединен с двигателем. (Полезная модель  71573)
71573)
Недостатком данного устройства является невозможность регулирования частоты вращения выходного вала двигателя из-за отсутствия возможности управления подаваемым напряжением на статорные обмотки двигателя. Вследствие этого в момент пуска возможно прохождение больших токов по статорным обмоткам электродвигателя, что может привести к выходу из строя электродвигателя и длительным аварийным простоям.
Ближайшим аналогом к заявляемой системе управления является система управления тиристорной станцией упрапваления плавного пуска асинхронного двигателя, которая включает последовательно соединенные блок тиристорных ключей, систему импульсно-фазового управления, систему автоматического регулирования, блок управления, блок задания, блок датчиков, три выхода которого соединены с входами блока регистрации просадки фазного напряжения, блока максимально-токовой защиты и системы автоматического регулирования, а один из выходов блока регистрации просадки фазного напряжения, блока время-токовой защиты и блока максимально-токовой защиты соединен с входами блока сигнализации, а другие соединены с блоком управления, блок тиристорных ключей соединен с асинхронным двигателем, система снабжена блоком контроля сгорания силовых предохранителей, вход которого соединен с одним из выходов блока тиристорных ключей, а выход соединен с входом блока датчиков, выход блока датчиков соединен с входом блока регулирования уставок время-токовой защиты, выход которого соединен с входом блока время-токовой защиты. (Полезная модель 67353)
Недостатками представленной системы управления является работа двигателя с пониженным напряжением при нагрузках значительно меньше номинального значения, что ведет к снижению перегрузочной способности двигателя и стабильности параметров вырабатываемой механической энергии, т.к. максимальный момент двигателя прямо пропорционален квадрату напряжения на нем. Кроме того, при регулировании технологического оборудования возможны случаи повторно-кратковременных режимов работы электродвигателя, что значительно снижает ресурс его работы.
Технический результат полезной модели заключается в повышении КПД работы устройства при нагрузках, значительно ниже номинальных; стабилизации вырабатываемого момента и обеспечение надежной работы устройства во всем диапазоне изменения нагрузки; увеличение срока эксплуатации электродвигателя.
Система управления тиристорной станцией управления асинхронным двигателем, включающая блок задания, блок управления, датчики, систему автоматического регулирования, систему импульсно-фазового управления, блок тиристорных ключей, причем выход блока задания соединен с первым входом блока управления, второй вход блока управления соединен с датчиками, выход блока управления соединен со входом системы автоматического регулирования, выход которого соединен со входом системы импульсно-фазового управления, выход которой соединен со входом блока тиристорных ключей, причем новым является то, что в систему управления дополнительно введены устройство суммирования напряжения, управляемый дифференциал, генератор, использованы датчики напряжения фаз и датчик крутящего момента, причем выход блока тиристорных ключей соединен с первым входом устройства суммирования напряжения, второй вход устройства суммирования соединен с выходом генератора, выход устройства суммирования напряжения соединен со входом асинхронного двигателя, выход асинхронного двигателя соединен со входом управляемого дифференциала, один из выходов дифференциала соединен со входом генератора, а другой выход - с нагрузкой.
Сущность полезной модели поясняется чертежом, где представлена функциональная схема системы управления тиристорной станцией управления асинхронным двигателем.
Система управления тиристорной станцией управления асинхронным двигателем содержит следующие блоки и устройства: блок задания 1, блок управления 2, систему автоматического регулирования (CAP) 3, систему импульсно-фазового управления (СИФУ) 4, блок тиристорных ключей 5, представляющий собой три пары встречно-параллельно включенных тиристоров; устройство суммирования напряжения 6, включающее датчики напряжения; асинхронный двигатель с короткозамкнутым ротором 7; управляемый дифференциал 8; генератор 9; датчики напряжения 10; датчик крутящего момента 11.
Входящие в состав системы управления тиристорной станцией блоки и устройства соединены следующим образом. Выход блока задания 1 соединен с первым входом блока управления 2, второй вход блока управления 2 соединен с датчиками напряжения фаз и датчиком крутящего момента 11, выход блока управления 2 соединен со входом системы автоматического регулирования 3, выход которой соединен со входом системы импульсно-фазового управления 4, выход которой соединен со входом блока тиристорных ключей 5.
Блок задания 1 на основании входного сигнала управления вырабатывает воздействие, определяющее требуемую величину крутящего момента на выходе системы, и поступающее на блок управления 2.
В системе использованы датчики напряжения фаз 10, которые расположены на выходе устройства суммирования напряжения 6, соединенном с двигателем 7, а также входят в состав устройства суммирования напряжения 6 и осуществляют измерение напряжения фаз на втором входе, соединенном с генератором 7. Также осуществляют измерение величины крутящего момента на выходе системы датчиком крутящего момента 11, установленного на первом выходном вале дифференциала 8, соединенного с нагрузкой. Датчики напряжения 10 служат для измерения напряжения на статорных обмотках асинхронного двигателя 7 с передачей значений в блок управления 2.
Блок управления 2, вход которого соединен с датчиками напряжения фаз и датчиком крутящего момента 11, осуществляет обработку измерительных сигналов с датчиков системы управления. В соответствии с сигналом блока задания, блок управления 2 вырабатывает управляющий сигнал, подаваемый на CAP 3.
Блок тиристорных ключей 5 представляет собой встречно-параллельное соединение тиристоров, расположенных в каждой фазе. CAP 3 через СИФУ 4 управляет работой блока тиристорных ключей 5, регулируя фазные напряжения.
Выход блока тиристорных ключей 5 соединен с первым входом устройства суммирования напряжения 6, второй вход устройства суммирования соединен с выходом генератора 9. Устройство суммирования напряжения 6 предназначено для суммирования напряжений, поступающих с выхода блока тиристорного коммутатора 5 и выхода генератора 9.
Выход устройства суммирования напряжения 6 соединен со входом асинхронного двигателя 7. Выход асинхронного двигателя 7 соединен со входом управляемого дифференциала 8. Управляемый дифференциал 8 осуществляет перераспределение входного крутящего момента между его выходными валами под действием управляющего сигнала.
Первый выход управляемого дифференциала 8 соединен с нагрузкой, второй выход управляемого дифференциала 8 соединен со входом генератора 9. Под действием крутящего момента, ротор генератора 9 приводится во вращение, вырабатывается электрическое напряжение.
Система управления тиристорной станцией управления асинхронным двигателем работает следующим образом.
После подключения сетевого трехфазного напряжения и статорных обмоток асинхронного двигателя 7 к блоку тиристорных ключей 5 через входные (фазные провода и нейтраль) и выходные клеммы силовой цепи системы управления тиристорной станцией управления асинхронным двигателем осуществляют плавный пуск двигателя 5 по заранее заданным параметрам. В свою очередь CAP 3 через СИФУ 4 управляет работой тиристорных ключей 5, регулируя фазные напряжения на выходе тиристорного коммутатора. Это позволяет обеспечить плавное увеличение действующего значения напряжения на статорных обмотках асинхронного двигателя 7 при разгоне.
Одновременно с этим на выходе двигателя 7 вырабатывается крутящий момент, передаваемый на вход управляемого дифференциала 8, который распределяет крутящий момент на два независимых выходных вала: первый выходной вал - к нагрузке потребителя, второй выходной вал - к входному валу генератора 9. Блоком управления 2 через блок задания 1 производится сравнение величины крутящего момента на первом выходном вале дифференциала посредством датчика крутящего момента 11 с величиной, требуемой технологическим процессом в данный момент времени.
В случае обнаружения избыточного крутящего момента на первом выходном вале управляемого дифференциала 8, формируют сигнал управления дифференциалом 8, обеспечивающий снижение величины крутящего момента на первом выходном вале, соединенного с нагрузкой, и, соответственно, увеличение крутящего момента на втором выходном вале, соединенного с генератором 9.
Таким образом, весь избыточный механический момент, выработанный электродвигателем 7, передается на второй выходной вал управляемого дифференциала 8, соединенного с входным валом генератора 9. Под действием крутящего момента, ротор генератора 9 приводится во вращение, вырабатывается электрическое напряжение. Посредством устройства суммирования напряжения 6, подаваемые на его вход напряжения блока тиристорных ключей 5 и с обмоток генератора 9, суммируются с последующей передачей полученного напряжения на статорные обмотки асинхронного двигателя 7. Таким образом, напряжение, выработанное генератором 9, используется для питания электродвигателя 7.
При этом с помощью датчиков напряжения 10 измеряют действующие значения напряжений на статорных обмотках двигателя 7, и при его отклонении от заданного формируют сигнал управления на систему импульсно-фазового управления 4 через блок управления 2 и CAP 3, снижающий (повышающий) величину напряжения на выходе тиристорного коммутатора в случае ее избытка (недостатка) на входе электродвигателя.
Таким образом, производится коррекция величины напряжения на статорных обмотках асинхронного двигателя 7 в соответствии с его режимом работы.
Предлагаемая система управления тиристорной станцией управления асинхронным двигателем позволяет обеспечить регулирование технологического оборудования со стабильными значениями момента на выходном валу за счет управляемого распределения выработанного двигателем крутящего момента посредством управляемого дифференциала.
Система управления тиристорной станцией управления асинхронным двигателем за счет использования управляемого дифференциала позволяет осуществить не только плавный пуск и останов двигателя, но обеспечить непрерывное функционирование двигателя при регулировании технологического оборудования в широком диапазоне в независимости от величины нагрузки, т.е. обеспечить работу без повторно-кратковременных режимов, что увеличивает ресурс работы двигателя.
Электрическая энергия, потребляемая двигателем, преобразуется в крутящий момент, который передается на входной вал управляемого дифференциала. Если переданный крутящий момент не был востребован на первом выходном вале управляемого дифференциала, соединенного с нагрузкой, то вследствие перераспределения крутящего момента между выходными валами управляемого дифференциала, избыточный крутящий момент передается на второй выходной вал, соединенный со входом генератора. Выработанное генератором напряжение, поступает на вход устройства суммирования напряжений и вновь используется для питания двигателя. Таким образом, из сети двигатель будет потреблять в основном полезную мощность, необходимую для работы электродвигателя. Это ведет к снижению энергопотребления двигателем из сети и повышению КПД работы устройства.
Система управления тиристорной станцией управления асинхронным двигателем, включающая блок задания, блок управления, блок датчиков, систему автоматического регулирования, систему импульсно-фазового управления, блок тиристорных ключей, причем выход блока задания соединен с первым входом блока управления, второй вход блока управления соединен с датчиками, выход блока управления соединен со входом системы автоматического регулирования, выход которой соединен со входом системы импульсно-фазового управления, выход которой соединен со входом блока тиристорных ключей, отличающаяся тем, что в систему управления дополнительно введены устройство суммирования напряжения, управляемый дифференциал, генератор, использованы датчики напряжения фаз и датчик крутящего момента, причем выход блока тиристорных ключей соединен с первым входом устройства суммирования напряжения, второй вход устройства суммирования соединен с выходом генератора, выход устройства суммирования напряжения соединен со входом асинхронного двигателя, выход асинхронного двигателя соединен со входом управляемого дифференциала, один из выходов дифференциала соединен со входом генератора, а другой выход - с нагрузкой.

poleznayamodel.ru
| Автор(ы): | Петров Л. П., Ладензов В. А., Обуховский М. П., Подзолов Р. Г. 04.12.2011 |
| Год изд.: | 1970 |
| Описание: | В книге рассматривается управление асинхронными коротко-замкнутыми двигателями при помощи тиристорных коммутаторов. Изложены принципы и особенности такого управления и применения тиристоров для формирования пусковых, тормозных и некоторых специальных режимов бесконтактного асинхронного привода. Основное внимание уделено динамике асинхронного привода с учетом электромагнитных переходных процессов и математическому моделированию как основному методу анализа и исследования. Рассматриваются также принципы построения силовой части тиристорных коммутаторов для осуществления различных режимов управления асинхронными двигателями, проводится сравнительная оценка ряда схем коммутаторов и описываются некоторые из них. Приводится материал экспериментального исследования различных режимов привода и схем коммутаторов. Книга рассчитана на инженеров, специализирующихся в области автоматизированного электропривода и промышленной электроники Она может быть также полезна студентам электротехнических специальностей. |
| Оглавление: |  Введение [3]Условные обозначения [5]Глава первая. Принципы тиристорного управления асинхронными двигателями. [7] 1. Тиристорный элемент, как коммутатор однофазной цепи переменного тока [7] 2. Тиристорные коммутаторы в трехфазных цепях [11] 3. Особенности коммутации статорных цепей асинхронных двигателей с помощью тиристоров [23]Глава вторая. Режимы работы асинхронных короткозамкнутых двигателей с тиристорным управлением [31] 4. Принципы формирования динамических характеристик двигателей при помощи тиристорных коммутаторов [31] 5. Управление пуском двигателя [32] 6. Управление динамическим торможением [39] 7. Особенности тиристорного управления реверсом [47] 8. Возможности получения низких скоростей и малых перемещений [53]Глава третья. Исследование режимов тиристорного управления [59] 9. Методы исследования [59] 10. Моделирование однофазных индуктивных цепей, содержащих тиристоры [60] 11. Моделирование асинхронного двигателя с тиристорами в цепи статора [68] 12. Моделирование режимов динамического торможения при тиристорном управлении [78] 13. Некоторые результаты моделирования режимов работы асинхронных двигателей с тиристорным управлением [85]Глава четвертая. Схемы тиристорных коммутаторов для управления асинхронными двигателями [91] 14. Структурные схемы тиристорных коммутаторов [91] 15. Рациональные схемы силовой части тиристорных коммутаторов [93] 16. Основные принципы построения схем управления [99] 17. Тиристорные коммутаторы для управления пуском [104] 18. Тиристорные коммутаторы для торможения [115] 19. Выбор тиристоров и их защита [119]Литература [123] Введение [3]Условные обозначения [5]Глава первая. Принципы тиристорного управления асинхронными двигателями. [7] 1. Тиристорный элемент, как коммутатор однофазной цепи переменного тока [7] 2. Тиристорные коммутаторы в трехфазных цепях [11] 3. Особенности коммутации статорных цепей асинхронных двигателей с помощью тиристоров [23]Глава вторая. Режимы работы асинхронных короткозамкнутых двигателей с тиристорным управлением [31] 4. Принципы формирования динамических характеристик двигателей при помощи тиристорных коммутаторов [31] 5. Управление пуском двигателя [32] 6. Управление динамическим торможением [39] 7. Особенности тиристорного управления реверсом [47] 8. Возможности получения низких скоростей и малых перемещений [53]Глава третья. Исследование режимов тиристорного управления [59] 9. Методы исследования [59] 10. Моделирование однофазных индуктивных цепей, содержащих тиристоры [60] 11. Моделирование асинхронного двигателя с тиристорами в цепи статора [68] 12. Моделирование режимов динамического торможения при тиристорном управлении [78] 13. Некоторые результаты моделирования режимов работы асинхронных двигателей с тиристорным управлением [85]Глава четвертая. Схемы тиристорных коммутаторов для управления асинхронными двигателями [91] 14. Структурные схемы тиристорных коммутаторов [91] 15. Рациональные схемы силовой части тиристорных коммутаторов [93] 16. Основные принципы построения схем управления [99] 17. Тиристорные коммутаторы для управления пуском [104] 18. Тиристорные коммутаторы для торможения [115] 19. Выбор тиристоров и их защита [119]Литература [123] |
| Формат: | djvu |
| Размер: | 3268767 байт |
| Язык: | РУС |
| Рейтинг: | 18 |
| Ссылка 1: | открыть |
www.nehudlit.ru

Категория:
Схемы электроприводов крановых механизмов
Тирисюрная схема управления асинхронным электродвигателемВ связи с увеличением длины канатов крюковой подвески на кранах с большой высотой подъема возникла необходимость в плавном регулировании скорости механизма поворота, поэтому на этих кранах применяют специальные схемы электроприводов.
Механизм поворота приводится асинхронным электродвигателем Ml с фазным ротором, управляемым с помощью тиристоров (рис. 101, а). В приводе использован параметрический способ регулирования скорости, основанный на изменении напряжения, подводимого к статору электродвигателя. Развиваемый электродвигателем вращающий хмомент пропорционален квадрату подводимого напряжения, поэтому изменение напряжения на зажимах электродвигателя вызывает изменение скорости вращения его ротора.
На схеме тиристоры Д1—Д6 включены встречно-параллельно в каждую фазу статора электродвигателя и выполняют роль быстродействующих бесконтактных переключателей. Напряжение, подводимое к электродвигателю, изменяется управлением проводимости тиристоров. Для получения жестких механических характеристик в схеме предусмотрена обратная связь по скорости, выполненная с помощью тахогенератора Г, и динамическое торможение асинхрон-ного электродвигателя, которое осуществляется с помощью тиристоров Д7 и Д8, причем переход от двигательного режима работы электродвигателя к тормозному режиму происходит автоматически с помощью блока БТР (блока тормозного режима).
Тиристорами управляют с помощью электронной схемы. Управляющее напряжение постоянного тока снимается с резистора с переменным сопротивлением, подается в блок генератора пилообразного напряжения ГПН и сравнивается с пилообразным напряжением синхронным и синфазным с сетью. Резистор связан с командоконтроллером и величина его сопротивления зависит от положения рукоятки управления.

Рис. 101. Электропривод механизма поворота с тиристорным управлением:а — функциональная электрическая схема, б — механические характеристики привода; ГПН — блок генератора пилообразного напряжения, ФИ — блок формирования импульсов, У МИ— блок усиления мощности импульсов, БТР —блок тормозного режима, Г — тахогенератор, ОВГ — обмотка возбуждения тахогене-ратора, Bnl — выпрямитель цепи обратной связи по току; U — задающее напряжение
При установке рукоятки управления в одно из положений вправо (влево) в результате отклонения напряжения пилообразной формы относительно напряжения управления появляется импульс, длительность которого зависит от значения напряжения управления, т.е. от положения, в которое установлена рукоятка управления. Этот импульс поступает в блок формирования импульса {ФИ), в котором происходит его предварительное усиление и преобразование в импульс соответствующей формы. Преобразованный импульс поступает в блок усиления мощности импульсов (УМИ), где усиливается до значений, необходимых для надежного управления тиристорами, после чего поступает на управляющие электроды тиристоров. При этом открыты и управляются тиристоры Д1 г Д6, тиристоры Д7 и Д8 заперты и электродвигатель Ml работает в двигательном режиме.
В двигательном режиме работы привода напряжение управления больше напряжения обратной связи, снимаемого с тахогенератора Г, и ток протекает в соответствии с полярностью напряжения управления. Момент сопротивления механизма поворота в процессе работы крана может изменяться в зависимости от ветровой нагрузки и подветренной площади обрабатываемого груза. При изменении знака момента сопротивления на валу электродвигателя система начинает ускоряться. Напряжение обратной связи становится больше напряжения управления, вследствие чего изменяется направление тока в цепи и появляются импульсы в блоке БТР. Эти импульсы поступают в блок ФИ, который запирает тиристоры Д2, ДЗ, Д5, Д6 и открывает тиристоры Д7, Д8 (тиристоры Д1 и Д4 остаются открытыми). Электродвигатель начинает работать в режиме динамического торможения, затормаживая механизм поворота. Когда скорость привода уменьшится до величины, заданной управлением, напряжение обратной связи снова станет меньше напряжения управления. При этом исчезнут импульсы в блоке БТР, блок ФИ запрет тиристоры Д7 и Д8, откроет тиристоры Д2, ДЗ, Д5, Д6 и электродвигатель автоматически перейдет в двигательный режим работы.
Механические характеристики привода (рис. 101, б) обеспечивают работу механизма поворота крана с различной скоростью, величина которой зависит от положения рукоятки командоконтроллера.
Читать далее: Назначение и классификация устройств
Категория: - Схемы электроприводов крановых механизмов
stroy-technics.ru
ЭЛЕКТРОПРИВОДА МЕТАЛЛОРЕЖУЩИХ СТАНКОВ
В данном разделе рассматриваются устройства, силовая схема которых состоит из встречно-параллельно соединенных тиристоров (или симисторов), установленных в цепи статора двигателя (рис. 57,6). Из рисунка видно, что при вращении в одну сторону работают пары тиристоров 1—3, в другую — 3—5. Встречно-параллельное включение тиристоров обусловлено включением их в цепь переменного тока: одну полуволну сетевого напряжения пропускает один тиристор, другую — второй. Тиристорами управляет блок управления (БУ). Такое устройство получило название тиристорного регулятора напряжения. Достоинством его является минимальное число силовых вентилей. Посредством фазового управления тиристорами изменяется действующее напряжение статора двигателя (рис. 57,а).
| г j ♦ s
|
|
|
Простейшая схема устройства служит только для включения и отключения двигателя и называется бесконтактным пускателем, который обеспечивает замену контактных пускателей в режимах частых пусков и реверсов. Некоторые бесконтактные пускатели обеспечивают снижение пусковых токов и плавный разгон двигаа
|
|
|
|
| Рис. 57. Тиристорный регулятор напряжения серии ТСУ-Р: а — фазовое управление; б — силовая схема |
теля. При плавном пуске темп возрастания момента двигателя замедлен, чтобы не допустить ударов в механических передачах станка. Кроме того, бесконтактные пускатели осуществляют динамическое торможение. Посредством открытия части тиристором создается цепь подачи постоянного тока в обмотки двигателя.
Самым простым способом плавного регулирования частоты вращения служит изменение напряжения на обмотках статора двигателя. Диапазон регулирования частоты вращения при постоянном моменте не более 1 : (1,2-т-1,5). Несмотря на малый: диапазон регулирования, этот способ невыгоден из-за больших потерь в двигателе, т. е. КПД привода мал. Увеличение диапазона регулирования с малым отклонением частоты вращения может быть получено применением обратной связи по частоте вращения,. что требует пристройки к двигателю тахогенератора (G).
Рассмотрим работу регулируемого электропривода с тиристорным регулятором напряжения. Задающий сигнал требуемой частоты вращения сравнивается с сигналом обратной связи. Сигнал обратной связи, снимаемый с тахогенератора, пропорционален истинной частоте вращения. Разность данных сигналов является управляющим сигналом. Если этот сигнал положительный, то частота вращения меньше заданной, например из-за увеличения момента сопротивления. Управляющий сигнал приводит к увеличению угла проводимости тиристоров а, повышается напряжение на статоре и, соответственно, значение критического момента двигателя. В результате увеличивается частота вращения, приближаясь к заданной.
Для управления пуско-тормозными режимами, реверсом и регулирования частоты вращения трехфазных асинхронных двигателей предназначены тиристорные системы управления серии ТСУ-Р. Система управления снабжена защитами от короткого замыкания, перегрузки, обрыва фаз, коммутационного перенапряжения и нулевой защитой. ТСУ-Р работает по принципам, описанным выше. При наличии тахогенератора обеспечивается диапазон регулирования частоты вращения 1 : 10. ТСУ-Р выпускается на номинальные токи 4—100 А (мощность двигателей до 40 кВт). В некоторых модификациях имеется динамическое торможение. Время пуска,' реверса или динамического торможения может ре
гулироваться от 0,01 до 0,25 с. Величина токовой отсечки задается в пределах 1—4 /ном. Подробные данные и описание приводятся в каталоге Л К 08.06.20—77. Тиристорные системы управления іТСУ-МУЗ, ТСУ-РИУЗ.
В ряде станков при обработке заготовки с неравномерным припуском или использовании тонкого инструмента (например, при глубоком сверлении) необходимо ограничение нагрузки приводов. Нагрузка главного привода ограничивается посредством влияния на привод подачи, например, при росте припуска снижается подача.
Команда о превышении нагрузки может сниматься с трансформатора тока. Следует учитывать, что момент и мощность асинхронного двигателя не являются прямо пропорциональными току статора из-за изменения коэффициента мощности. Более точное измерение момента или мощности выполняется, если кроме трансформатора тока используется трансформатор напряжения. В результате геометрического сложения их сигналов, взятых с определенными коэффициентами, вычисляется сигнал на выходе, пропорциональный моменту.
Отключение электропривода при превышении определенной величины ^момента нагрузки имеет место в зажимных механизмах. Известны конструкции зажимных устройств, в которых при достижении необходимого усилия срабатывает конечный выключатель. После этого отключается двигатель. Более точно работает зажимной механизм, если двигатель отключается по команде реле максимального тока, катушка которого установлена в цепи статора двигателя. Реле срабатывает при токе, превышающем двойную номинальную величину.
В ряде станков предусматривается точный останов некоторых механизмов. Кроме других факторов, влияние на точность останова оказывает частота вращения, с которой начинается торможение. Поэтому перед точным остановом производят понижение частоты вращения.
Здесь рассмотрены электроприводы, не требующие плавного регулирования частоты вращения в широком диапазоне, но на которые возложена задача точного останова. Режим пониженной («ползучей») частоты вращения получается, если на обмотки двигателя одновременно подается переменный и постоянный ток. Асинхронная машина работает в совмещенных режимах: двигательном и динамического торможения. Результирующая механическая характеристика имеет участок с двигательным моментом и низкой (0-=-0,15) «ном частотой вращения. Этот режим по условиям нагрева двигателя должен быть кратковременным.
Цилиндрический редуктор - простое и эффективное решение для ступенчатого снижения числа оборотов и повышения крутящего момента.
Разборка и сборка электроприводов серии ПМСМ (1—3-й типы размеров). При разборке следует освободить выходной конец вала агрегата от шкива или другого соединительного устройства; снять щеткодержатель 7 (см. рис. 55, а) …
Наладка выпрямителей и их систем управления, входящих в преобразователи частоты, проводится по той же методике, как и в случае электроприводов постоянного тока. При наладке инверторов должны применяться высокочастотные осциллографы. Для …
msd.com.ua
Одним из путей повышения надежности подобных устройств является замена механических контактов бесконтактными ключами на полупроводниковых приборах. В качестве таковых в цепях переменного тока используют однооперационные тиристоры (тринисторы). Они позволяют управлять значительной мощностью при малых затратах мощности на собственное управление.
В тиристорных ключах не возникают перенапряжения при коммутациях цепей с индуктивностями, так как выключение всегда происходит в обесточенном состоянии. Число возможных выключателей механического контактора ограничено: в зависимости от типа аппарата оно достигает 103 – 108. Тиристорные контакторы не имеют таких ограничений.
Принципиальная схема новой системы представлена на рисунке. Она содержит два одинаковых тиристорных блока №1 и 2 в фазах А и С. Каждый блок состоит из двух тиристоров VT.
 Цепи управления тиристорами связаны через резистор R2 и замыкающий контакт реле P1. Резистор R2 служит для ограничения величины тока управления тиристоров. Цепи управления защищены от обратного напряжения диодами VD, от сигналов помехи – резисторами R1.
Цепи управления тиристорами связаны через резистор R2 и замыкающий контакт реле P1. Резистор R2 служит для ограничения величины тока управления тиристоров. Цепи управления защищены от обратного напряжения диодами VD, от сигналов помехи – резисторами R1.В фазы А и С обмоток статора асинхронного двигателя АД введены катушки тепловозы реле РТ1 и РТ2 для его защиты от перегрузок. От таков короткого замыкания двигатель защищен предохранителями.
Схема работает следующим образов. Если рубильник Р включен, то для пуска двигателя следует нажать кнопку «Пуск». При этом получает питание катушка реле Р1, замыкаются его контакт в цепи управления тиристорами и блокировка, шунтирующая кнопку «Пуск».
Пружина возвращает кнопку в исходное положение. Реле Р1 встает на самоподхват. Через замкнувшийся контакт Р1 в цепи управления тиристорами VTпоступает сигнал на отпирание от анодного напряжения. Обмотка статора двигателя получает питание от сети.
Чтобы отключить двигатель, нажимают кнопку «Стоп». При этом катушка реле Р1 теряет питание, размыкаются контакты Р1 и цепи управления тиристорами. Последние закрываются, обмотки статора отсоединяются от сети.
Надежность срабатывания защиты при перегрузки контролировали на примере обрыва линейного провода В во время работы двигателя. В данном режиме двигатель продолжает вращается в том же направлении, но с пониженной скоростью.
Если предположить, что мощность в однофазном режиме остается примерно равной мощности в трехфазном режиме.
Таким образом, при обрыве одной фазы (режим однофазного двигателя) двигатель потребляет ток примерно в 1.7 раза больше, чем в нормальном режиме. Описанная система была изготовлена и установлена для управления приводным асинхронным двигателем насоса АД-61-2 (серия АД-3000) мощностью 16 кВт. Масса тиристоров с охладителями составляет 2.4 кг, массаконтакторов магнитного пускателя – 4.2 кг. Ее эксплуатация в течении двух лет подтвердила устойчивую работу во всех режимах.
Предлагаем Вам посетить наш раздел Статьи, в нем вы найдете очень много интересного для себя и вашей работы на подвижном составеbase-road.ru
 Дляуправления асинхронным двигателем могут использоваться тиристоры всочетании с релейно-контакторными аппаратами. Тиристоры применяются вкачестве силовых элементов и включаются в статорную цепь,релейно-контакторные аппараты включаются в цепь управления. Используятиристоры в качестве силовых коммутаторов, можно на статор при пускеподавать напряжение от нуля до номинального значения, ограничивать токи имоменты двигателя, осуществлять эффективное торможение либо шаговыйрежим работы …
Дляуправления асинхронным двигателем могут использоваться тиристоры всочетании с релейно-контакторными аппаратами. Тиристоры применяются вкачестве силовых элементов и включаются в статорную цепь,релейно-контакторные аппараты включаются в цепь управления. Используятиристоры в качестве силовых коммутаторов, можно на статор при пускеподавать напряжение от нуля до номинального значения, ограничивать токи имоменты двигателя, осуществлять эффективное торможение либо шаговыйрежим работы …
Для управления асинхронным двигателем могут использоваться тиристоры в сочетании с релейно-контакторными аппаратами. Тиристоры применяются в качестве силовых элементов и включаются в статорную цепь, релейно-контакторные аппараты включаются в цепь управления.
Используя тиристоры в качестве силовых коммутаторов, можно на статор при пуске подавать напряжение от нуля до номинального значения, ограничивать токи и моменты двигателя, осуществлять эффективное торможение либо шаговый режим работы. Такая схема приведена на рис. 1.
Силовая часть схемы состоит из группы тиристоров VS1…VS4, включенных встречно-параллельно в фазы А и С. Между фазами А и В включен короткозамыкающий тиристор VS5. Схема состоит из силовой цепи (рис. 1, а), цепи управления (рис. 1, б) и блока управления тиристорами — БУ (рис. 1, в).
Для пуска двигателя включается автоматический выключатель QF, нажимается кнопка SB1 «Пуск», в результате чего включаются контакторы КМ1 и КМ2. На управляющие электроды тиристоров VS1…VS4 подаются импульсы, сдвинутые на 60° относительно питающего напряжения. К статору двигателя прикладывается пониженное напряжение, что приводит к снижению пускового тока и пускового момента.
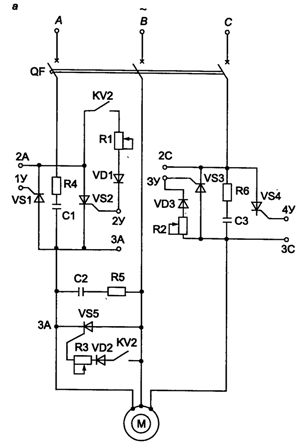
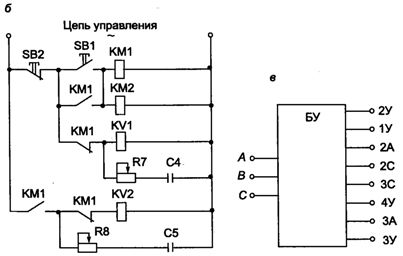
Рис. 1. Тиристорное управление асинхронным двигателем с короткозамкнутым ротором
Размыкающий контакт КМ1 отключает реле KV1 с выдержкой времени, которая определяется резистором R7 и конденсатором С4. Размыкающими контактами реле KV1 шунтируются соответствующие резисторы в блоке управления, и на статор подается полное напряжение сети.
Для торможения нажимается кнопка SB2 «Стоп». Схема управления теряет питание, отключаются тиристоры VS1…VS4. Это приводит к тому, что на период торможения включается реле KV2 за счет энергии, запасенной конденсатором С5, и своими контактами включает тиристоры VS2 и VS5. Через фазы А и В статора проходит постоянный ток, который регулируется резисторами R1 и R3. Обеспечивается эффективное динамическое торможение.
 10.12.2016
10.12.2016
 Без рубрики
Без рубрики

talkipad.ru














