По стандарту SAE вращение вала двигателя должно происходить против часовой стрелки (CCW — counterclockwise), если смотреть на двигатель со стороны маховика (по часовой стрелке, если смотреть на двигатель спереди). Сторона двигателя, на которой установлен маховик, — это та сторона, с которой отбирается механическая мощность для привода автомобиля, или сторона отбора мощности. Сторона распределения (сторона привода агрегатов) — это противоположный торец, обычно называемый передней стороной двигателя, на котором монтируются приводы агрегатов двигателя.

Рис. На этой фотографии четырехцилиндрового рядного двигателя указаны его сторона отбора мощности и сторона распределения. Стандартным направлением вращения вала является вращение по часовой стрелке, если смотреть на двигатель спереди, т.е. с той стороны, на которой находятся ремни приводов агрегатов двигателя (со стороны распределения)
Таким образом, для заднеприводных автомобилей характерно продольное расположение двигателя, когда он обращен стороной отбора мощности назад. Двигатели с поперечным расположением также, как правило, соответствуют по направлению вращения стандарту. У двигателей автомобилей Honda и судовых двигателей направление вращения может не соответствовать стандартному.
ustroistvo-avtomobilya.ru
Cтраница 1
Направление вращения вала электродвигателя меняется переключателем полярности тока. [1]
Проверяют направление вращения вала электродвигателя кратковременным его включением. Вал должен вращаться по часовой стрелке, если смотреть со стороны двигателя. [2]
Проверить направление вращения вала электродвигателя, которое должно соответствовать вращению винта. [3]
Проверяют соответствие направления вращения вала электродвигателя требуемому. [4]
Направление движения моста определяется направлением вращения вала электродвигателя. [5]
Валики 8 и 9 управления золотниками гидравлического распределителя и направлением вращения вала электродвигателя движения, а также вертикальный вал 6 рулевого управления проходят через бак в специальных трубках, что обеспечивает необходимую герметичность. [6]
Схема управления электроприводом осуществляет его включение и выключение, изменение частоты и устанавливает направление вращения вала электродвигателя, заданное время и очередность включения отдельных элементов электропривода, а также защиту их от аварийных режимов и перегрузок. [7]
Расположение контактов в штепсельных соединениях позволяет быстро сменить соединение фаз и тем самым изменить направление вращения вала электродвигателя вибратора. [8]
Расположение контактов в штепсельных соединениях позволяет соединить вилку с розеткой в одно из двух возможных положений, благодаря чему можно быстро сменить соединение фаз, когда необходимо изменить направление вращения вала электродвигателя. [10]
Для устранения причин, вызывающих ухудшение коэффициента теплопередачи испарителя, удаляют иней с камерных охлаждающих приборов, систематически контролируют, а при необходимости и повышают концентрацию хладоносителя, производят продувку загрязненных испарителей горячим паром рабочего тела или сжатым воздухом, систематически проверяют работу мешалок испарителей и вентиляторов воздухоохладителей, контролируя число оборотов и направление вращения вала электродвигателя. [11]
Для устранения причин, вызывающих ухудшение коэффициента теплопередачи испарителя, удаляют иней с камерных охлаждающих приборов, систематически контролируют, а при необходимости и повышают концентрацию хладоносителя, производят продувку загрязненных испарителей горячим паром рабочего тела или сжатым воздухом, систематически проверяют работу мешалок испарителей и вентиляторов воздухоохладителей, контролируя число оборотов и направление вращения вала электродвигателя. [12]
Барабанным контроллером производится переключение в силовой цепи электродвигателя. Направление вращения вала электродвигателя изменяется поворотом маховика в ту или иную сторон от нулевого положения. Положение маховика фиксируется специальным механизмом. [13]
Вблизи компрессорного агрегата монтируют электропусковой щит, с помощью которого обеспечивают подачу тока к электродвигателям агрегата, приборам пуска и автоматики. Проверяют направление вращения валов электродвигателей, выполняют работы по заземлению корпусов электродвигателей и компрессорно-конденса-торных пусковых устройств. [14]
Барабаны у них вращаются в одну и другую сторону. Это достигается изменением направления вращения вала электродвигателя. [15]
Страницы: 1 2
www.ngpedia.ru
Cтраница 1
Направления вращения двигателей постоянного тока регулируются изменением направления тока либо только в якоре, либо только в обмотке возбуждения. Одновременное изменение направления тока в якоре и обмотке возбуждения не приводит к реверсированию двигателя. [1]
Чтобы изменить направление вращения двигателя постоянного тока, следует изменить направление тока в обмотке якоря или в обмотке индуктора. [2]
Для изменения направления вращения двигателя постоянного тока необходимо изменить направление тока либо только в якоре, либо только в обмотке возбуждения. [3]
Для изменения направления вращения двигателя постоянного тока необходимо изменить направление тока либо только в якоре, либо только в. [4]
Для изменения направления вращения двигателя постоянного тока необходимо изменить направление силы, действующей на проводники якоря в магнитном поле. [5]
Для изменения направления вращения двигателя постоянного тока необходимо изменить направление тока либо только в якоре, либо только в обмотке возбуждения. [6]
Для остановки двигателя снимают нагрузку, затем в цепи параллельной обмотки возбуждения выводят реостат, что приводит к увеличению тока возбуждения, возрастанию магнитного потока и снижению скорости вращения; затем вводят пусковой реостат и, наконец, при помощи разъединителя или автомата отключают двигатель от сети. Чтобы изменить направление вращения двигателя постоянного тока, нужно изменить направление тока либо только в обмотке якоря, либо только в обмотке возбуждения. [7]
Для изменения направления вращения двигателя постоянного тока, имеющего смешанное возбуждение, необходимо изменить направление тока в обмотках якоря и дополнительных полюсов или изменить направление тока как в параллельной, так и в последовательной обмотках возбуждения. [9]
Серводвигатели могут иметь разное исполнение, но, как правило, все они обладают реверсивными свойствами. Известно, что изменение направления вращения двигателя постоянного тока осуществляется либо за счет изменения направления тока, проходящего через якорь, либо за счет изменения направления потока возбуждения. В серводвигателях сериесного типа ( рис. 6.12) для осуществления реверсирования предусматривают две обмотки возбуждения ОВ1 и 052 и в зависимости от того, какая из них задействована, двигатель вращается в ту или другую сторону. Обычно такой двигатель управляется релейным элементом в виде, например, перекидного контакта / С. [11]
Известно, что для изменения направления вращения двигателя постоянного тока надо изменить направление тока в якоре или в обмотке возбуждения. В данном случае принято изменять направление тока в якоре, что значительно легче ввиду меньшей индуктивности этой обмотки, и поэтому при переключении этой цепи не возникает больших перенапряжений. [12]
Реверсивными называют преобразователи, позволяющие изменять полярность постоянного напряжения на нагрузке. Реверсивные преобразователи используются главным образом в электроприводе для изменения направления вращения двигателей постоянного тока. [14]
Реверсивными называются преобразователи, позволяющие изменять полярность постоянного напряжения и тока в нагрузке. Реверсивные преобразователи используются, главным образом, в электроприводе для изменения направления вращения двигателей постоянного тока. [15]
Страницы: 1
www.ngpedia.ru
>С увеличением нагрузки на валу двигателя увеличивается так же и ток в якоре. Это вызывает увеличение падения напряжения» сопротивлении обмотки якоря и щеточных контактах.
Так как ток возбуждения остается неизменным (машина нерегулируема), то магнитный поток также постоянен. Однако при увеличении тока в якоре увеличивается размагничивающее действие потока реакции якоря и магнитный поток Ф несколько уменьшится. Увеличение Iяrя вызывает уменьшение скорости двигателя, а уменьшение Ф увеличивает скорость. Обычно падение напряжения влияет на изменение скорости в несколько большей степени, чем реакция якоря, так что с увеличением тока в якоре скорость уменьшается. Изменение скорости у двигателя этого типа незначительно и не превышает 5% при изменении нагрузки от нуля до номинальной, т. е. двигатели параллельного возбуждения имеют жесткую скоростную характеристику.

При неизменном магнитном потоке зависимость момента от тока в якоре представится прямой линией. Но под воздействием

Вращающий момент двигателя реакции якоря с увеличением нагрузки происходит некоторое уменьшение магнитного потока и зависимость момента пойдет несколько ниже прямой линии.
Схема двигателя последовательного возбуждения показана на рис. 153. Пусковой реостат этого двигателя имеет только два зажима, так как обмотка возбуждения и якорь образуют одну последовательную цепь. Характеристики двигателя изображены на рис. 154. Число оборотов двигателя последовательного возбуждения определяется следующим выражением:

где rс— сопротивление последовательной обмотки возбуждения. В двигателе последовательного возбуждения магнитный поток не остается постоянным, а резко изменяется с изменением нагрузки, что вызывает значительное изменение скорости. Так как падеже напряжения в сопротивлении якоря и в обмотке возбуждения очень мало в сравнении с приложенным напряжением, то число оборотов можно приближенно определить следующим выражением:

Если пренебречь насыщением стали, то можно считать магнитный поток пропорциональным току в обмотке возбуждения, который равен току в якоре. Следовательно, у двигателя последовательного возбуждения скорость вращения обратно пропорциональна току в якоре и число оборотов резко уменьшается с увеличением нагрузки, т. е. двигатель имеет мягкую скоростную характеристику. С уменьшением нагрузки скорость вращения двигателя увеличивается. При холостом ходе (Iя=0) скорость двигателя беспредельно возрастает, т. е. двигатель идет в разнос.
Таким образом, характерным свойством двигателей последовательного возбуждения является недопустимость сброса нагрузки, т. е. работы вхолостую или при малых нагрузках. Двигатель имеет минимальную допустимую нагрузку, составляющую 25—30% номинальной. При нагрузке меньше минимально допустимой скорость двигателя резко увеличивается, что может вызвать его разрушение. Поэтому, когда возможны сбросы или резкие уменьшения нагрузки, использование двигателей последовательного возбуждения является недопустимым.
В двигателях очень малых мощностей сброс нагрузки не вызывает разноса, так как механические потери двигателя будут достаточно большой нагрузкой для него.
Вращающий момент двигателя последовательного возбуждения, учитывая пропорциональную зависимость между магнитным потоком и током в якоре (Ф = С’Iя), можно определить следующим выражением:

где K’=KC’
т. е. вращающий момент пропорционален квадрату тока. Однако при больших токах сказывается насыщение стали и зависимость момента приближается к прямой линии. Таким образом двигатели этого типа развивают большие вращающие моменты при малых оборотах, что имеет существенное значение при пуске больших инерционных масс и перегрузках. Эти двигатели широко используют в транспортных и подъемных устройствах.
При смешанном возбуждении возможно как согласное, так и встречное включение обмоток возбуждения.
Двигатели со встречным включением обмоток не нашли широкого применения, так как они обладают плохими пусковыми свойствами и работают неустойчиво.
Скоростные характеристики двигателей смешанного возбуждения занимают промежуточное положение между характеристиками двигателей параллельного и последовательного возбуждения.
С увеличением тока в якоре число оборотов якоря уменьшается в большей мере, чем для двигателей параллельного возбуждения, за счет увеличения магнитного потока, вызываемого увеличением тока в последовательной обмотке возбуждения. При холостом ходе двигатель смешанного возбуждения не идет вразнос, так как магнитный поток не уменьшается до нуля из-за наличия параллельной обмотки возбуждения.
При увеличении нагрузки в двигателях смешанного возбуждения увеличивается магнитный поток и вращающий момент возрастает в большей мере, чем в двигателях параллельного возбуждения, но в меньшей мере, чем в двигателях последовательного возбуждения.

§ 116 РЕГУЛИРОВАНИЕ СКОРОСТИ ВРАЩЕНИЯ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Двигатели постоянного тока дают возможность плавно и экономично регулировать скорость вращения в широких пределах. В результате этого весьма ценного свойства двигатели постоянного тока получили широкое распространение и часто являются незаменимыми.
Число оборотов якоря двигателя при любой схеме возбуждения определяется следующим выражением:

где rс — сопротивление последовательной обмотки возбуждения (для двигателя параллельного возбуждения rс=0). Это выражение показывает, что изменение скорости вращения двигателя можно осуществить изменением напряжения сети, сопротивления цепи якоря и магнитного потока.
Регулирование скорости вращения изменением напряжения сети осуществляется в случае, когда источником электрической энергий двигателя является какой-либо генератор.
Для регулирования скорости вращения двигателя изменением сопротивления цепи якоря используется регулировочный реостат, включенный последовательно с якорем. В отличие от пускового регулировочный реостат должен быть рассчитан на длительное прохождение тока. В сопротивлении регулировочного реостата происходит большая потеря энергии, вследствие чего резко уменьшается
п. д. двигателя.
Регулирование скорости вращения якоря двигателя изменением магнитного потока производится изменением тока в обмотке возбуждения. В двигателях параллельного и смешанного возбуждения включается регулировочный реостат. В двигателях последовательного возбуждения изменение тока в обмотке возбуждения достигается шунтированием этой обмотки каким-либо регулируемым сопротивлением. Этот способ регулирования скорости не создает дополнительных потерь и экономичен.
§ 117. ПОТЕРИ И К. П. Д. МАШИН ПОСТОЯННОГО ТОКА
В машинах постоянного тока при работе происходит потеря энергии, которая складывается из следующих потерь:
1. Потери в стали Рст на гистерезис и вихревые токи, возникающие в сердечнике якоря. При вращении якоря машины сталь его сердечника непрерывно перемагничивается. На перемагничивание стали затрачивается мощность, называемая потерями на гистерезис. Одновременно, при вращении якоря в магнитном поле в сердечнике его индуктируются вихревые токи. Потери на гистерезис и вихревые токи, называемые потерями в стали, обращаются в тепло и нагревают сердечник якоря.
Потери в стали зависят от магнитной индукции и частоты перемагничивания сердечника якоря.
Магнитная индукция зависит от э. д. с. машины или, иначе, от напряжения, а частота перемагничивания — от скорости вращения якоря. Поэтому при работе машины постоянного тока в режиме генератора или двигателя потери в стали будут постоянными, не зависящими от нагрузки, если напряжение на зажимах якоря и скорость его вращения постоянны.
2. Потери энергии на нагревание проводов обмоток возбуждения и якоря протекающими по ним токами, называемые потерями в меди,— Роб.
fiziku5.ru
| При многодвигательном электроприводе иногда требуется, чтобы несколько электродвигателей, удаленных друг от друга на значительное расстояние, вращались с одинаковой скоростью. Такие случаи имеют место в электроприводах экскалаторов, прокатных станов, механизмов передвижения перегрузочных мостов, некоторых типов грейферных лебедок и др. Вращение электродвигателей, имеющих различную нагрузку, с одинаковой скоростью называется согласованным. Согласованное вращение может быть осуществлено путем механического соединения их валов. Однако при значительном удалении машин друг от друга, а также при неудобном их расположении механическое соединение зачастую оказывается затруднительным, так как при этом необходимо применять валы слишком большой длины и диаметра, большое количество подшипников и других механических приспособлений, что увеличивает вес, габариты, стоимость привода и затрудняет его эксплуатацию. Для обеспечения согласованного вращения электродвигателей при неодинаковых нагрузках разработан ряд электрических схем, позволяющих получить синхронное вращение электродвигателей без использования механических приспособлений. Такие схемы называются системами синхронного вращения. В них используются асинхронные машины, обеспечивающие наиболее надежную работу привода. Различают системы синхронного вращения со вспомогательными синхронизирующими машинами и без вспомогательных машин. В состав любой системы синхронного вращения входят главные электродвигатели, обеспечивающие привод механизмов. В системах первой группы с валами главных электродвигателей соединяются вспомогательные асинхронные или синхронные машины, с помощью которых и осуществляется согласованное вращение главных электродвигателей. В системах без вспомогательных машин согласованное вращение осуществляется непосредственно за счет главных электродвигателей, соединенных определенным образом между собой. Нужно иметь в виду, что в системах со вспомогательными машинами возможно применение главных электродвигателей любого типа. Однако системы синхронного вращения с главными электродвигателями постоянного тока применяются сравнительно редко и здесь не рассматриваются. То же самое относится и к системам синхронного вращения со вспомогательными синхронными машинами, которые не обеспечивают согласованного вращения главных электродвигателей в период пуска и торможения и поэтому применяются очень редко.
Для примера рассмотрим систему синхронного вращения, состоящую (рис. 56, а) из двух главных электродвигателей Д1 и Д2 и двух вспомогательных асинхронных машин А1 и A2. Машина А1 насажена на вал главного электродвигателя Д1 а машина А2—на вал электродвигателя Д2. Главные электродвигатели могут быть удалены друг от друга на значительное расстояние, однако при любых нагрузках они должны вращаться с одинаковыми скоростями. В качестве главных электродвигателей в схеме используются асинхронные короткозамкнутые электродвигатели. Роль же вспомогательных машин выполняют небольшие асинхронные электродвигатели с контактными кольцами; роторы вспомогательных машин, как показано на схеме, соединены встречно. Статорные обмотки всех четырех машин питаются от общей сети трехфазного тока. Если главные электродвигатели Д1 и Д2 однотипны и имеют одинаковую нагрузку, то вращаются они с одинаковыми скоростями. Вспомогательные машины А1 и А2 тоже имеют при этом одинаковую скорость и никаких вращающих моментов не создают. Это объясняется тем, что обмотки роторов вспомогательных машин включены навстречу друг другу. Вследствие этого э. д. е., наводимые в каждой фазе ротора одной вспомогательной машины, уравновешиваются э. д. е., наводимыми в фазах ротора другой машины. Поэтому в обмотках роторов вспомогательных машин токи отсутствуют и никаких вращающих моментов машины не создают, т. е. главные электродвигатели, имея одинаковые механические характеристики, будут вращаться синхронно и без участия вспомогательных машин. В случае увеличения нагрузки, например, на электродвигатель Д1 скорость последнего начнет снижаться и между роторами вспомогательных машин А1 и А2 возникнет угол рассогласования. В результате э. д. с. их роторных обмоток уравновешиваться не будут и в них появятся уравнительные токи, что приведет к созданию дополнительных вращающих моментов, приложенных к валам I и II. Нетрудно доказать, что в рассматриваемом случае вспомогательная машина А1 будет потреблять электроэнергию из сети, а машина А2, наоборот, отдавать определенную часть электроэнергии в сеть. Это значит, что синхронизирующая машина Ах создает вращающий момент, совпадающий с направлением вращения вала I, а машина А2 создает момент, направленный навстречу вращению вала II. В результате нагрузки между главными электродвигателями Д1 и Д2 уравновесятся и скорость вращения их практически не изменится. В рассмотренной схеме роторы синхронизирующих машин А1 и А2 вращаются в ту же сторону, что и магнитные поля их статоров, т. е. «по полю». Скольжения в этих случаях сравнительно невелики, поэтому нет оснований ожидать, что вспомогательные машины будут создавать большие синхронизирующие моменты. Действительно, величина э. д. с. роторной обмотки асинхронной машины зависит от скольжения. Чем меньше скольжение, тем меньше величины э. д. е., наводимой в обмотке ротора, и тем меньше уравнительные токи, протекающие между роторными обмотками вспомогательных машин при нарушении равновесия. По этой причине синхронизирующие моменты, создаваемые вспомогательными машинами А1 и А2, сравнительно невелики и при большей разности нагрузок между двигателями Д1 и Д2 вспомогательные машины, включенные по схеме, изображенной на рис. 56, а, могут не обеспечить синхронного вращения валов I и II. Этим и объясняется сравнительно редкое использование на практике рассмотренной схемы. Значительно чаще применяется система синхронного вращения асинхронных электродвигателей со вспомогательными машинами, вращающимися «против поля» (рис. 56,б), получившая название «электрического вала». Эта схема работает практически так же, как и предыдущая. Разница состоит только в том, что здесь роторы вспомогательных машин А1 и А2 под действием главных электродвигателей Д1 и Д2 вращаются в сторону, противоположную направлению вращения магнитного поля статора. Поэтому при рассогласовании системы, когда нагрузки на двигатели Д1 и Д2 будут неодинаковы, вращающие моменты, создаваемые синхронизирующими машинами, будут значительно выше, чем в первом случае, а это обусловливает большую надежность схемы и согласованность вращения главных электродвигателей Д1 и Д2 практически при любых нагрузках. Схема «электрического вала» обеспечивает синхронное вращение главных электродвигателей не только при значительной разнице моментов статического сопротивления в установившихся электродвигательном и тормозных режимах работы, но и при переходных процессах (во время пусков и реверсов). Однако ее главным недостатком является большое количество электрических машин, что усложняет привод и увеличивает его стоимость. При небольшой разнице в нагрузках согласованное вращение асинхронных электродвигателей может быть достигнуто без использования вспомогательных синхронизирующих машин. Для этого главные электродвигатели Д1 и Д2 необходимо включать по схеме, показанной на рис. 57. Как и в предыдущих схемах, статорные обмотки электродвигателей питаются от общей сети трехфазного тока, а роторы включены навстречу друг другу и присоединены к реостату (для увеличения скольжения при различных нагрузках электродвигателей). Если электродвигатели Д1 и Д2 нагружены одинаково и вращаются строго синхронно, э. д. с., наводимые в роторных обмотках, равны по величине и направлены навстречу друг другу.
Если из-за неравенства нагрузки один из роторов отстанет от другого, в проводах, соединяющих роторы, появится уравнительный ток, который создаст для более нагруженной машины дополнительный двигательный, а для менее нагруженной машины дополнительный тормозной момент. Последнее приведет к тому, что нагрузки на электродвигатели станут равными и они будут вращаться синхронно. Система синхронного вращения без вспомогательных машин отличается простотой, обеспечивает синхронное вращение главных электродвигателей в установившемся двигательном режиме и тормозном режиме противовключения. Однако величина синхронизирующего момента, как указывалось, зависит от величины э. д. с. ротора, а последняя, в свою очередь, от скольжения, при котором работает машина. Поэтому при малых величинах скольжения синхронизирующий момент, создаваемый электродвигателями, будет мал, и электродвигатели, будучи выведены из состояния синхронной работы, вернуться в нее не смогут, так как даже при сравнительно небольшой разнице в моментах статического сопротивления (10—15%) скольжение должно быть не менее 20—25%. Поэтому чтобы электродвигатели вращались синхронно, необходимо искусственно увеличивать их скольжение введением дополнительных сопротивлений в роторные цепи, что приводит к увеличению потерь мощности. Рассматриваемая система имеет и недостатки. При отключении электродвигателей от сети их синхронное вращение нарушается. Это приводит к тому, что при последующем пуске могут возникнуть недопустимо большие пусковые токи и моменты из-за возможного значительного угла рассогласования роторов. Для предотвращения этого схему приходится усложнять и она практически теряет все свои преимущества. Поэтому эта схема применяется сравнительно редко, хотя стоимость установки меньше предыдущей. |
vdvizhke.ru
Скорость вращения ротора асинхронных двигателей определяют из выражения
N2 = n1 (1 – s) = 60f / р (l – s),
откуда следует, что скорость ротора можно регулировать, изменяя частоту тока питающей сети f, число пар полюсов статорной обмотки р и величину скольжения s.
Регулирование скорости вращения путём изменения величины скольжения s можно применять только для двигателей с фазным ротором, для чего в цепь ротора вводят регулировочный реостат. Плавное изменение сопротивления этого реостата приводит к плавному изменению величины скольжения и, следовательно, - скорости вращения двигателя. Таким способом можно регулировать скорость вращения только нагруженного двигателя в пределах от 1 до 0,7 номинальной скорости вращения ротора. В режиме холостого хода изменение активного сопротивления цепи ротора почти не влияет на скорость вращения.
Рассмотренный способ регулирования имеет два недостатка: большие потери энергии в реостате и сильное влияние тормозного момента на скорость вращения. Однако этот способ регулирования получил широкое распространение.
Регулирование скорости изменением числа пар полюсов не позволяет получать плавного изменения скорости вращения. Этот способ применяется в основном у двигателей с короткозамкнутой обмоткой ротора и даёт возможность осуществлять лишь ступенчатое регулирование, что легко установить из выражения для скорости вращения магнитного поля n = 60f / р. При частоте тока f = 50 гц и различных значениях числа пар полюсов р можно получить 3000, 1500, 1000, 750 и 600 об/мин. Промышленность выпускает многоскоростные асинхронные двигатели, у которых каждая фаза статорной обмотки состоит из нескольких отдельных частей. Соединение этих частей различным способом даёт возможность изменять число пар полюсов, следовательно, и скорость вращения двигателя.
Многоскоростные асинхронные двигатели применяют в подъёмно-транспортных механизмах, насосах и других установках, в которых не требуется плавность регулирования скорости. В тех случаях, когда необходимо плавное регулирование скорости электропривода, могут быть использованы системы электромеханического регулирования скорости вращения (например, механические вариаторы, электромагнитные муфты скольжения, порошковые муфты и другие). В качестве примера рассмотрим схему электропривода серии ПМС с асинхронным двигателем и электромагнитной муфтой скольжения (рис.56 а).
Муфта скольжения – 1 состоит из ведущего массивного якоря – Я и индуктора – И с катушкой возбуждения – К. Якорь муфты соединён валом – 2 приводного двигателя, а индуктор с валом рабочего механизма – 3. В катушку возбуждения индуктора через контактные кольца – 4 подаётся постоянный ток Iн от выпрямителя – 5.
Приводной двигатель вращает якорь электромагнитной муфты с постоянной скоростью. При этом якорь пересекает магнитные силовые линии, созданные током Iн катушки возбуждения индуктора, и в нём возникают вихревые токи. В результате взаимодействия этих токов с магнитным полем появляются электромагнитные силы, увлекающие индуктор, а с ним и ведомый вал рабочего механизма. Так же, как и в асинхронном двигателе, индуктор вращается медленнее якоря. Величину скольжения муфты определяют по формуле:
S = (n1 – n2) / n1
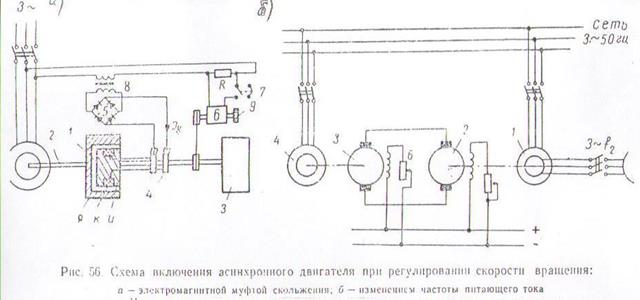
Для плавного регулирования скорости вращения индуктора необходимо изменить ток возбуждения Iв. Повышение жёсткости механических характеристик привода обеспечивается центробежным регулятором – 6 путём автоматического изменения тока возбуждения индуктора. Если скорость вращения вала рабочего механизма меньше заданной, контакты – 7 центробежного регулятора замыкаются, шунтируя сопротивление R. В этом случае через катушку возбуждения индуктора пойдёт максимальный ток и скорость вращения индуктора возрастёт. Наоборот, при увеличении скорости вращения вала контакты центробежного регулятора размыкаются и ток, проходящий через первичную обмотку трансформатора – 8, уменьшается. При этом ток возбуждения Iв падает, индуктор вращается медленнее, контакты центробежного регулятора снова замыкаются и т.д. В рассмотренной схеме контакты замыкаются и размыкаются от 10 до 40 раз в секунду, что позволяет поддерживать скорость вращения вала рабочего механизма фактически равной заданной скорости, устанавливаемой поворотом рукоятки – 9 центробежного регулятора.
Регулирование скорости изменением частоты тока, питающего обмотку статора асинхронного двигателя, позволяет получить плавное регулирование в широких пределах. При этом способе используется преобразователь частоты тока (рис. 56 б), состоящий из асинхронного преобразователя частоты – 1, двигателя – 2, генератора – 3 постоянного тока и асинхронного двигателя – 4.
Асинхронный двигатель – 4, питаемый из сети током нормальной частоты f = 50 гц, приводит во вращение генератор постоянного тока – 3, служащий источником электрической энергии для двигателя постоянного тока – 2. Этот двигатель вращает асинхронный преобразователь – 1, являющийся источником электрической энергии переменной частоты для асинхронного двигателя привода – 5. При помощи регулировочного реостата – 6 изменяется напряжение генератора и, следовательно, скорость вращения двигателя постоянного тока. Это в свою очередь вызывает изменение частоты тока f2, вырабатываемого асинхронным преобразователем – 1.
Рассмотренный частотный способ регулирования скорости вращения двигателя требует сложной и дорогостоящей аппаратуры и применяется главным образом для одновременного регулирования скорости группы асинхронных двигателей.
poznayka.org
Основным преимуществом электродвигателей с параллельным возбуждением является возможность широкого и плавного регулирования их скорости вращения.
Уравнения, выведенные в особенностях электродвигателей постоянного тока, показывают, что искусственная регулировка скорости вращения может производиться тремя способами: изменением сопротивления якорной цепи, изменением магнитного потока и изменением напряжения, подводимого к якорю.
Регулирование скорости вращения изменением сопротивления якорной цепи. Для регулирования скорости вращения электродвигателя в цепь якоря последовательно включают дополнительные сопротивления (см. рис. 10). Уравнение (30) показывает, что каждому новому значению дополнительного сопротивления соответствует своя искусственная механическая характеристика. То же самое относится и к скоростным характеристикам. Анализ этого уравнения показывает, что между сопротивлением якорной цепи и скоростью вращения существует линейная зависимость, т. е. при любом значении R характеристики электродвигателя остаются прямолинейными и при холостом ходе проходят через точку п = п0. Очевидно, чем выше величина дополнительного сопротивления, тем мягче искусственная характеристика электродвигателя (рис. 12). Это означает, что при одной и той же нагрузке скорость электродвигателя тем ниже, чем выше величина дополнительного сопротивления, включенного в якорную цепь. Уменьшение скорости объясняется дополнительным падением напряжения в добавочном сопротивлении.

Процесс перехода от одной скорости к другой происходит следующим образом. Допустим, электродвигатель, развивая момент М = Мс, работает устойчиво на естественной характеристике а в точке 1 (контакты 1У, 2У и 3У на рис. 10 замкнуты). Если необходимо снизить скорость вращения электродвигателя, размыкают контакт 1У и тем самым в цепь якоря вводят дополнительное сопротивление R1. Согласно уравнению (30) электродвигатель должен перейти на характеристику b, соответствующую новому значению сопротивления якорной цепи. Электродвигатель обладает значительной инерцией и при переключении сопротивлений скорость его вращения мгновенно измениться не может. Поэтому в первый момент электродвигатель переходит на работу в соответствующей точке 2 на характеристике b. При этом ток якоря и вращающий момент уменьшаются, нарушается равновесие моментов (М<Мc) и скорость электродвигателя начинает снижаться до тех пор, пока снова не восстановится равновесие моментов (М = Мс). Следовательно, устойчивая работа электродвигателя будет теперь в точке 3 на характеристике b.
Аналогичным образом происходит переход на характеристики с и d при включении сопротивлений R2 и R3.
Для увеличения скорости вращения электродвигателя необходимо отключить часть дополнительного сопротивления. Например, если электродвигатель устойчиво работает в точке 7 на характеристике d, то при отключении сопротивления R3 (при замыкании контактов 3У) происходит переход на работу по характеристике с. При этом первоначально (в точке 8) резко увеличивается ток и момент электродвигателя и скорость начинает возрастать. В точке 5 восстанавливается равновесие моментов и увеличение скорости прекращается. При последовательном отключении остальных ступеней регулировочного реостата происходит постепенное возрастание скорости вращения до величины n1.
Данный способ регулирования скорости вращения отличается простотой электрической схемы и применяется сравнительно часто для электродвигателей крановых механизмов. Однако ему присущи и некоторые существенные недостатки. В частности, регулирование скорости рассмотренным способом сопровождается большими .потерями мощности в реостате. Поэтому стараются применять его лишь в тех случаях, когда мощность электродвигателя невелика или снижение скорости вращения должно быть кратковременным. Большим недостатком является также громоздкость и высокая стоимость регулировочного реостата, который должен быть рассчитан на номинальный ток электродвигателя. Это заставляет уменьшать число ступеней реостата и предусматривать специальные меры для его охлаждения.
Регулирование скорости вращения изменением магнитного потока. Если в цепь обмотки возбуждения включить последовательно реостат (см. рис. 10), то скорость вращения электродвигателя с параллельным возбуждением можно регулировать изменением магнитного потока. Для этого необходимо изменять величину сопротивления цепи возбуждения. Изменение сопротивления приводит к изменению тока возбуждения и, следовательно, к изменению магнитного потока электродвигателя. Очевидно, при отсутствии дополнительного сопротивления в цепи возбуждения магнитный поток электродвигателя имеет максимальное значение. Ему соответствуют естественные скоростная и механическая характеристики.
При введении же дополнительного сопротивления в цепь возбуждения магнитный поток уменьшается, а скорость увеличивается, причем, различным значениям магнитного потока соответствуют различные искусственные скоростная и механическая характеристики (рис. 13). Уравнения этих характеристик н.ичем не отличаются от уравнений (25) и (29).
Из уравнений вытекает, что характеристики при различных значениях магнитного потока остаются прямолинейными, причем меньшим значениям магнитного потока соответствуют большие значения скорости холостого хода. По мере снижения магнитного потока возбуждения жесткость характеристик электродвигателя несколько уменьшается, что объясняется влиянием реакции якоря.
Как было показано, в случае регулирования скорости изменением сопротивления в цепи якоря переход с одной характеристики на другую осуществляется практически при постоянной скорости. Это объясняется малой индуктивностью якоря, благодаря чему ток якоря изменяется практически мгновенно.
Обмотка же возбуждения электродвигателя .параллельного возбуждения обладает значительной индуктивностью. Поэтому в случае регулирования скорости изменением сопротивления цепи возбуждения переход с одной характеристики на другую осуществляется по так называемым динамическим характеристикам, которые могут быть построены в результате расчета переходных процессов. На рис. 13 динамические характеристики показаны пунктирной линией.

Регулирование скорости вращения электродвигателей с параллельным возбуждением изменением магнитного потока сопровождается незначительными потерями мощности в регулировочном реостате и является экономичным. Незначительные потери дают возможность использовать реостат небольших габаритов и веса, с большим числом регулировочных ступеней, что позволяет получить плавное, практически бесступенчатое регулирование скорости.
Недостатком данного способа регулирования скорости является ухудшение коммутации и снижение перегрузочной способности электродвигателя при повышенных скоростях. Скорость же при этом способе регулирования может изменяться только лишь в сторону увеличения по сравнению с номинальной, что сильно ограничивает применение данного способа. При больших нагрузках данный способ регулирования скорости вообще неприменим, так как снижение магнитного потока уменьшает вращающий момент и при переходе к высшей скорости может возникнуть недопустимо большой ток.
Регулирование скорости вращения изменением напряжения на зажимах якоря (система генератор—двигатель). В целях широкого и плавного регулирования скорости иногда применяют так называемую систему генератор—двигатель (сокращенно система Г—Д), которая позволяет использовать метод регулирования скорости изменением напряжения, подводимого к якорю электродвигателя. При питании электродвигателя от сети такой метод совершенно неприменим. Его применение возможно лишь при питании электродвигателя от отдельного генератора.

Обычно система Г—Д состоит из приводного двигателя ПД, генератора Г с возбудителем В и исполнительного электродвигателя ИД (рис. 14). Приводной электродвигатель питается от сети и служит для приведения во вращение генератора. Чаще всего в качестве приводного электродвигателя используется асинхронный короткозамкнутый электродвигатель, получающий питание от сети трехфазного тока. Он имеет постоянное направление вращения и вращается с постоянной скоростью. Исполнительный электродвигатель получает питание от генератора Г и приводит в действие механизм.
Генератор и исполнительный электродвигатель имеют независимое возбуждение. Их обмотки возбуждения ОВГ и ОВД питаются от возбудителя В, небольшого генератора постоянного тока, сидящего на одном валу с приводным электродвигателем ПД и генератором Г. Если в цепь обмотки ОВГ включить регулировочный реостат, то, изменяя величину его сопротивления, можно изменять скорость вращения исполнительного электродвигателя, так как при этом будет меняться величина напряжения генератора. Действительно, для цепи генератор—двигатель по II закону Кирхгофа можно составить следующее уравнение:

где Ег и Ед — соответственно э.д.с. генератора и электродвигателя;
Rг и Rд — соответственно сопротивление якорей генератора
и электродвигателя. Заменив э. д. с. электродвигателя, согласно выражению (7),. получим

Выражение (41) является уравнением скоростной характеристики исполнительного электродвигателя в системе Г—Д. Заменив в нем ток якоря выражением (28), получим уравнение механической характеристики

Уравнения (41) и (42) показывают, что путем изменения Ег можно изменять скорость вращения исполнительного электродвигателя. Следовательно, при уменьшении сопротивления регулировочного реостата Rp скорость исполнительного электродвигателя будет возрастать, а при увеличении сопротивления—уменьшаться, так как э. д. с. генератора Ег зависит от величины тока в обмотке ОВГ.
Нетрудно заметить, что механические и скоростные характеристики электродвигателя в системе Г—Д представляют собой прямые линии. Скорость холостого хода определяется первым членом правой части уравнения (41) или (42) и не остается постоянной величиной при различных значениях сопротивления Rр, т. е. каждому значению сопротивления Rр соответствует своя скоростная и механическая характеристики (рис. 15). Эти характеристики являются достаточно жесткими, что позволяет при применении специальных регулируемых электродвигателей получить широкий диапазон скоростей в пределах 1 : 100 и более, что является одним из основных положительных качеств системы Г—Д.

Иногда регулировочный реостат включают не только в цепь обмотки ОВГ, но в цепь обмотки возбуждения ИД, что дает возможность регулировать скорость вверх от номинальной.
Регулирование скорости по системе Г—Д является весьма экономичным, так как все переключения происходят в цепях обмоток возбуждения, где токи сравнительно невелики. Относительно небольшие мощности и габариты регулировочных реостатов позволяют получить большое число регулировочных ступеней и, следовательно, достаточно плавное регулирование скорости. Возможно также применение реостатов со скользящими контактами, что позволяет получить бесступенчатое регулирование скорости.
Система Г—Д очень удобна не только в отношении широты и плавности регулирования скорости. Она позволяет также очень просто производить реверс и торможение исполнительного электродвигателя. Так, для осуществления реверса необходимо, как известно, изменить полярность на зажимах якоря электродвигателя. Для этого достаточно изменить направление тока в обмотке ОВГ (или в обмотке ОВД). Для осуществления торможения достаточно отключить от возбудителя обмотку ОВГ. Небольшие размеры регулировочных реостатов позволяют широко использовать дистанционное управление системой Г—Д, что также является большим ее преимуществом.
Основной недостаток системы генератор—двигатель — большое количество электрических машин, высокая стоимость и относительно низкий к. п. д. установки, что, естественно, ограничивает область применения дайной системы.
vdvizhke.ru