двигатели с переменным магнитным сопротивлением
двигатели с постоянными магнитами
гибридные двигатели
биполярные и униполярные шаговые двигатели
Шаговые двигатели с переменным магнитным сопротивлением имеют несколько полюсов на статоре и ротор зубчатой формы из магнитомягкого материала. Намагниченность ротора отсутствует. Для простоты на рисунке ротор имеет 4 зубца, а статор имеет 6 полюсов. Двигатель имеет 3 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Такой двигатель имет шаг 30 град.
При включени тока в одной из катушек, ротор стремится занять положение, когда магнитный поток замкнут, т.е. зубцы ротора будут находиться напротив тех полюсов, на которых находится запитанная обмотка. Если затем выключить эту обмотку и включить следующую, то ротор поменяет положение, снова замкнув своими зубцами магнитный поток. Таким образом, чтобы осуществить непрерывное вращение, нужно включать фазы попеременно. Двигатель не чувствителен к направлению тока в обмотках. Реальный двигатель может иметь большее количество полюсов статора и большее количество зубцов ротора, что соответствует большему количеству шагов на оборот. Иногда поверхность каждого полюса статора выполняют зубчатой, что вместе с соответствующими зубцами ротора обеспечивает очень маленькое значения угла шага, порядка нескольких градусов. Двигатели с переменным магнитным сопротивлением довольно редко используют в индустриальных применениях.
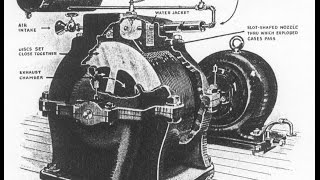
Двигатели с постоянными магнитами состоят из статора, который имеет обмотки, и ротора, содержащего постоянные магниты (рис. 1). Чередующиеся полюса ротора имеют прямолинейную форму и расположены параллельно оси двигателя. Благодаря намагниченности ротора в таких двигателях обеспечивается больший магнитный поток и, как следствие, больший момент, чем у двигателей с переменным магнитным сопротивлением.
Рис. 1. Двигатель с постоянными магнитами.
Показанный на рисунке двигатель имеет 3 пары полюсов ротора и 2 пары полюсов статора. Двигатель имеет 2 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Такой двигатель, как и рассмотренный ранее двигатель с переменным магнитным сопротивлением, имеет величину шага 30 град. При включени тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга. Для осуществления непрерывного вращения нужно включать фазы попеременно. На практике двигатели с постоянными магнитами обычно имеют 48 – 24 шага на оборот (угол шага 7.5 – 15 град).
Рис. 2. Разрез шагового двигателя с постоянными магнитами.
Для удешевления конструкции двигателя магнитопровод статора выполнен в виде штампованного стакана. Внутри находятся полюсные наконечники в виде ламелей. Обмотки фаз размещены на двух разных магнитопроводах, которые установлены друг на друге. Ротор представляет собой цилиндрический многополюсный постоянный магнит.
Двигатели с постоянными магнитами подвержены влиянию обратной ЭДС со стороны ротора, котрая ограничивает максимальную скорость. Для работы на высоких скоростях используются двигатели с переменным магнитным сопротивлением.
studfiles.net
двигатели с переменным магнитным сопротивлением
двигатели с постоянными магнитами
гибридные двигатели
биполярные и униполярные шаговые двигатели
полношаговый режим
полушаговый режим
микрошаговый режим
Момент, создаваемый шаговым двигателем, зависит от скорости, тока в обмотках и схемы драйвера. На рис. 1а показана зависимость момента от угла поворота ротора.
Рис. 1. Возникновение мертвых зон в результате действия трения.
У идеального шагового двигателя эта зависимость синусоидальная. Точки S являются положениями равновесия ротора для негруженного двигателя и соответствуют нескольким последовательным шагам. Если к валу двигателя приложить внешний момент, меньший момента удержания, то угловое положение ротора изменится на некоторый угол Ф.
Ф = (N/(2*pi))*sin(Ta/Th),
где Ф – угловое смещение, N – количество шагов двигателя на оборот, Ta – внешний приложенный момент, Th – момент удержания.
Угловое смещение Ф является ошибкой позиционирования нагруженного двигателя. Если к валу двигателя приложить момент, превышающий момент удержания, то под действием этого момента вал провернется. В таком режиме положение ротора является неконтролируемым.
На практике всегда имеется приложенный к двигателю внешний момент, хотя бы потому, что двигателю приходится преодолевать трение. Силы трения могут быть разделены на две категории: статическое трение или трение покоя, для преодоления которого требуется постоянный момент и динамическое трение или вязкое трение, которое зависит от скорости. Рассмотрим статическое трение. Предположим, что для его преодоления требуется момент в половину от пикового. На рис. 1а штриховыми линиями показан момент трения. Таким образом, для вращения ротора остается только момент, лежащий на графике за пределами штриховых линий. Отсюда следуют два вывода: трение снижает момент на валу двигателя и появляются мертвые зоны вокруг каждого положения равновесия ротора (рис. 1б):
d = 2 ( S / (pi/2) ) arcsin(T f /T h) = ( S / (pi/4) ) arcsin(T f / Th),
где d – ширина мертвой зоны в радианах, S – угол шага в радианах, Tf – момент трения, Th – момент удержания.
Мертвые зоны ограничивают точность позиционирования. Например, наличие статического трения в половину от пикового момента двигателя с шагом 90 град. вызовет наличие мертвых зон в 60 град. Это означает, что шаг двигателя может колебаться от 30 до 150 град., в зависимости от того, в какой точке мертвой зоны остановится ротор после очередного шага.
Наличие мертвых зон является очень важным для микрошагового режима. Если, например, имеются мертвые зоны величиной d, то микрошаг величиной менее d вообще не сдвинет ротор с места. Поэтому для систем с использованием микрошагов очень важно минимизировать трение покоя.
Когда двигатель работает под нагрузкой, всегда существует некоторый сдвиг между угловым положением ротора и ориентацией магнитного поля статора. Особенно неблагоприятной является ситуация, когда двигатель начинает торможение и момент нагрузки реверсируется. Нужно отметить, что запаздывание или опережение относится только к положению, но не к скорости. В любом случае, если синхронность работы двигателя не потеряна, это запаздывание или опережение не может превышать величины двух полных шагов. Это весьма приятный факт.
Каждый раз, когда шаговый двигатель осуществляет шаг, ротор поворачивается на S радиан. При этом минимальный момент имеет в место, когда ротор находится ровно между соседними положениями равновесия (рис. 2).
Рис. 2. Момент удержания и рабочий момент шагового двигателя.
Этот момент называют рабочим моментом, он означает, какой наибольший момент может преодолевать двигатель при вращении с малой скоростью. При синусоидальной зависимости момента от угла поворота ротора, этот момент Tr = Th/(20.5). Если двигатель делает шаг с двумя запитанными обмотками, то рабочий момент равен моменту удержания для одной запитанной обмотки. Параметры привода на основе шагового двигателя сильно зависят от характеристик нагрузки. Кроме трения, реальная нагрузка обладает инерцией. Инерция препятствует изменению скорости. Инерционная нагрузка требует от двигателя больших моментов на разгоне и торможении, ограничивая таким образом максимальное ускорение. С другой стороны, увеличение инерционности нагрузки увеличивает стабильность скорости.
Такой параметр шагового двигателя, как зависимость момента от скорости является важнейшим при выборе типа двигателя, выборе метода управления фазами и выборе схемы драйвера. При конструировании высокоскоростных драйверов шаговых двигателей нужно учитывать, что обмотки двигателя представляют собой индуктивность. Эта индуктивность определяет время нарастания и спада тока. Поэтому если к обмотке приложено напряжение прямоугольной формы, форма тока не будет прямоугольной. При низких скоростях (рис. 3а) время нарастания и спада тока не способно сильно повлиять на момент, однако на высоких скоростях момент падает. Связано это с тем, что на высоких скоростях ток в обмотках двигателя не успевает достигнуть номинального значения (рис. 3б).
Рис. 3. Форма тока в обмотках двигателя на разных скоростях работы.
Для того, чтобы момент падал как можно меньше, необходимо обеспечить высокую скорость нарастания тока в обмотках двигателя, что достигается применением специальных схем для их питания. Поведение момента при увеличении частоты коммутации фаз примерно таково: начиная с некоторой частоты среза момент монотонно падает. Обычно для шагового двигателя приводятся две кривые зависимости момента от скорости (рис. 4).
Рис. 4. Зависимость момента от скорости.
Внутренняя кривая (кривая старта, или pull-in curve) показывает, при каком максимальном моменте трения для данной скорости шаговый двигатель способен тронуться. Эта кривая пересекает ось скоростей в точке, называемой максимальной частотой старта или частотой приемистости. Она определяет максимальную скорость, на которой ненагруженный двигатель может тронуться. На практике эта величина лежит в пределах 200 – 500 полных шагов в секунду. Инерционность нагрузки сильно влияет на вид внутренней кривой. Большая инерционность соответствует меньшей области под кривой. Эта область называется областью старта. Внешняя кривая (кривая разгона, или pull-out curve) показывает, при каком максимальном моменте трения для данной скорости шаговый двигатель способен поддерживать вращение без пропуска шагов. Эта кривая пересекает ось скоростей в точке, называемой максимальной частотой разгона. Она показывает максимальную скорость для данного двигателя без нагрузки. При измерении максимальной скорости нужно иметь в виду, что из-за явления резонанса момент равен нулю еще и на резонансной частоте. Область, которая лежит между кривыми, называется областью разгона.
studfiles.net
Шаговый двигатель, принцип работы
Шаговый двигатель – это бесщёточное устройство с синхронным принципом функционирования и несколькими обмотками. Работа двигателя основывается на поэтапной активации обмоток ротора, которые обеспечивают перемещения, то есть шаги ротора или его фиксацию. Вращение статора и ротора возникает засчёт магнитных потоков. Сила вращения шагового двигателя пропорциональна силе магнитного поля, которая соответствует числу витков в обмотке и показателю тока в ней. Итак, шаговый двигатель - устройство, преобразующее электроимпульсы в механическое движение. Конструкция двигателя состоит из выводов, вала и круглого корпуса.
Виды шаговых двигателей
Шаговый двигатель купить можно, выбирая из различных видов этих устройств. На современном рынке реализуются следующие виды шаговых агрегатов:
Двигатель переменного сопротивления вращается свободно, имеет три или четыре обмотки. Двигатель с постоянным магнитом испытывает сопротивление вращению, имеет две обмотки. Гибридный двигатель – это усовершенствованная модель двигателя постоянного сопротивления.
Сферы применения
Шаговый двигатель купить уместно для использования во многих технических сферах. Шаговые двигатели применяют в приводах непрерывного движения или в приводах механизмов со стартово-стопным режимом. Купить шаговый двигатель уместно для станков с чпу, поскольку управление в них осуществляется последовательностью электроимпульсов. Благодаря возможности точного позиционирования шаговые двигатели применяют в работе устройств компьютерной памяти и чтения оптических дисков. Высокая надёжность и хорошие технические показатели валовых двигателей объясняют их распространённое использование в военной промышленности. Также эти устройства нашли применение в автомобилях, различном производственном оборудовании, в бытовой технике.
Плюсы и минусы использования
Прежде чем шаговый двигатель купить следует учесть преимущества и недостатки его использования. Несомненным достоинством шаговых двигателей является точность вращения, при попадании заряда на обмотку ротор поворачивается на конкретный уровень. Плюсом является возможность купить шаговый двигатель для чпу по относительно невысокой стоимости. Шаговые двигатели отлично подойдут для оборудования систем автоматизации технических процессов. Шаговые двигатели способны работать в режиме быстрого старта или остановки, а также перезапуска. Этим устройствам присуща высокоточная величина шага, высокая степень повторяемости без нарастания процента погрешности с каждым оборотом. Возможность работы на пониженных скоростях вращения. Ещё одно преимущество шаговых двигателей обусловлено отсутствием в их конструкции щёток, что продлевает срок эксплуатации и повышает надёжность.
К недостаткам относится свойство шагового двигателя проскальзывать. Эта проблема происходит при неправильной установке программного обеспечения, при вхождении вращательной скорости в резонансное состояние, при превышении уровня валовой нагрузки. Чтобы предотвратить возможность проскальзывания на двигатель монтируют датчики для обратной связи для контроля за перемещением и скоростью вращения. В то же время датчик лишь сигнализирует о появлении проблемы, для её устранения потребуется остановка производственного процесса. Для предотвращения проскальзывания рекомендуется купить шаговый двигатель для чпу с увеличенной мощностью. Это позволит избежать проблем с проскальзыванием шагового двигателя и воспользоваться всеми его преимуществами.
cnc-tehnologi.ru
Определить тип двигателя можно даже на ощупь: при вращении вала обесточенного двигателя с постоянными магнитами (или гибридного) чувствуется переменное сопротивление вращению, двигатель вращается как бы щелчками. В то же время вал обесточенного двигателя с переменным магнитным сопротивлением вращается свободно. Гибридные двигатели являются дальнейшим усовершенствованием двигателей с постоянными магнитами и по способу управления ничем от них не отличаются. Определить тип двигателя можно также по конфигурации обмоток. Двигатели с переменным магнитным сопротивлением обычно имеют три (реже четыре) обмотки с одним общим выводом. Двигатели с постоянными магнитами чаще всего имеют две независимые обмотки. Эти обмотки могут иметь отводы от середины. Иногда двигатели с постоянными магнитами имеют 4 раздельных обмотки.
В шаговом двигателе вращающий момент создается магнитными потоками статора и ротора, которые соответствующим образом ориентированы друг относительно друга. Статор изготовлен из материала с высокой магнитной проницаемостью и имеет несколько полюсов. Полюс можно определить как некоторую область намагниченного тела, где магнитное поле сконцентрировано. Полюса имеют как статор, так и ротор. Для уменьшения потерь на вихревые токи магнитопроводы собраны из отдельных пластин, подобно сердечнику трансформатора. Вращающий момент пропорционален величине магнитного поля, которая пропорциональна току в обмотке и количеству витков. Таким образом, момент зависит от параметров обмоток. Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное положение. Он будет находится в этом положении до тех пор, пока внешний приложенный момент не превысит некоторого значения, называемого моментом удержания. После этого ротор повернется и будет стараться принять одно из следующих положений равновесия.
Ссылки по теме:www.texnologia.ru
шаговым двигателем присуще явление резонанса
возможна потеря контроля положения ввиду работы без обратной связи
потребление энергии не уменьшается даже без нагрузки
затруднена работа на высоких скоростях
невысокая удельная мощность
относительно сложная схема управления
угол поворота ротора определяется числом импульсов, которые поданы на двигатель
двигатель обеспечивает полный момент в режиме остановки (если обмотки запитаны)
прецизионное позиционирование и повторяемость. Хорошие шаговые двигатели имеют точность от 3 до 5% от величины шага. Эта ошибка не накапливается от шага к шагу
возможность быстрого старта/остановки/реверсирования
высокая надежность, связанная с отсутствием щеток, срок службы шагового двигателя фактически определяется сроком службы подшипников
однозначная зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи
возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к валу двигателя без промежуточного редуктора
может быть перекрыт довольно большой диапазон скоростей, скорость пропорциональна частоте входных импульсов
В системах управления электроприводами для отработки заданного угла или перемещения используют датчики обратной связи по углу или положению выходного вала исполнительного двигателя
Система отработки угла выходного вала двигателя с использованием датчика обратной связи.
Если в качестве исполнительного двигателя использовать синхронный шаговый двигатель, то можно обойтись без датчика обратной связи (Дт) и упростить систему управления двигателем (СУ), так как отпадает необходимость использования в ней цифро-аналоговых (ЦАП) и аналого-цифровых (АЦП) преобразователей. Шаговыми двигателями называются синхронные двигатели, преобразующие команду, заданную в виде импульсов, в фиксированный угол поворота двигателя или в фиксированное положение подвижной части двигателя без датчиков обратной связи.
Мощность шаговых двигателей лежит в диапазоне от единиц ватт до одного киловатта.
Шаговый двигатель имеет не менее двух положений устойчивого равновесия ротора в пределах одного оборота.
Напряжение питания обмоток управления шагового двигателя представляет собой последовательность однополярных или двуполярных прямоугольных импульсов, поступающих от электронного коммутатора (К). Результирующий угол соответствует числу переключений коммутатора, а частота вращения двигателя соответствует частоте переключений электронного коммутатора. Шаговые двигатели различаются по конструктивным группам: активного типа (с постоянными магнитами), реактивного типа и индукторные.
Шаговые синхронные двигатели активного типа. В отличие от синхронных машин непрерывного вращения шаговые двигатели имеют на статоре явно выраженные полюса, на которых расположены катушки обмоток управления. Принцип действия шагового двигателя активного типа рассмотрим на примере двухфазного двигателя
Различают два вида коммутации обмотки шагового двигателя: симметричная и несимметричная. При симметричной системе коммутации на всех четырех тактах возбуждается одинаковое число обмоток управления
studfiles.net
С момента появления в прошлом веке лервых электрических машин развитие их конструкций и возможностей определялось возрастающими требованиями к качеству и формам электромеханического преобразования энергии. Потери в процессе преобразования позволяют оценить количественную его сторону, совершенство способа представления энергии в нужной форме. Главные же в истории электромеханики вехи связаны с получением на этой основе различных видов механического движения.
Углубление специализации электрических машин накладывало глубокий отпечаток на конструктивное исполнение прототипа. Выделялись самостоятельные технические направления. В процессе этого циклического развития шаговые, или импульсные, электродвигатели дважды пережили процесс рождения и целенаправленного совершенствования их специальных свойств.
Одним из первых был описан шаговый механизм, выполненный в виде электромагнита с храповым колесом, предложенный в 1831 г. Сальваторе дель Негро. Точную дату изобретения шагового электродвигателя указать трудно, так как первые электрические машины постоянного тока, снабженные простейшим коллектором или механическим прерывателем, использовали принцип импульсного переключения обмоток. С точки зрения современных представлений, они могут быть отнесены к классу шаговых электродвигателей.
Развитие в конце позапрошлого века телефонии, а затем корабельных систем дистанционной связи вызвало к жизни поток изобретений в области импульсных механизмов с питанием от источника постоянного тока и управлением от механического коммутатора. Работами известных русских изобретателей Колокольцова (1888 г.), Гейслера (1890 г.), Максимова (1892 г.), Апостолом (1894 г.) в значительной степени были заложены основы возникшего тогда нового самостоятельного направления в технике — систем синхронной связи на постоянном токе.
Обстоятельные очерки развития систем синхронной связи на постоянном токе с импульсными электромеханизмами содержатся в книгах [1. Васильев Д. В., Электрические машины в системах синхронной связи. 2. Веребрюсов Н. А., Синхронные передачи и следящие системы. 3. Мкртычан Д. П., Хрущев В. В., Однофазные сельсины.]. Мы приведем лишь характерные примеры, заимствованные главным образом из [3], чтобы проследить цикличность инженерных поисков и решений.
Двигатель состоит из трех электромагнитов, расположенных под углом 120° друг к другу. Якоря электромагнитов при помощи трех шатунов Ш1 - Ш3соединяются с концом кривошипа, вращающегося вокруг центра О. Обмотки электромагнитов соединены в звезду, общая точка которой включена на отрицательный полюс источника постоянного напряжения. Другими своими концами обмотки соединены с неподвижными щетками Щ1 — Щ3 коммутатора, которые поочередно подключаются к положительному зажиму ( + ) источника при помощи контактного сегментаС, контактного кольца К и щетки Щ4.
Шаговый двигатель - это электромеханическое устройство, преобразующие сигнал управления в угловое (или линейное) перемещение ротора с фиксацией его в заданном положении без устройств обратной связи. При проектировании конкретных систем приходится делать выбор между сервомотором и шаговым двигателем. Когда требуется прецизионное позиционирование и точное управление скоростью, а требуемый момент и скорость не выходят за допустимые пределы, то шаговый двигатель является наиболее экономичным решением. Как и для обычных двигателей, для повышения момента может быть использован понижающий редуктор. Однако для шаговых двигателей редуктор не всегда подходит. В отличие от коллекторных двигателей, у котрых момент растет с увеличением скорости, шаговый двигатель имеет больший момент на низких скоростях. К тому же, шаговые двигатели имеют гораздо меньшую максимальную скорость по сравнению с коллекторными двигателями, что ограничивает максимальное передаточное число и, соответственно, увеличение момента с помощью редуктора. Готовые шаговые двигатели с редукторами хотя и существуют, однако являются экзотикой.
studfiles.net
Применение шаговых двигателей
Применение шаговых двигателей и сравнение двигателей.В работе фрезеров используются два типа двигателя: шаговый – электромеханическое устройство, преобразующее сигналы в угловое перемещение ротора с фиксацией в заданном положении. И серводвигатели – имеющие обратную связь, и которыми можно управлять через цепь контроллера путём увеличения и уменьшения тока. Шаговые имеют меньшую мощность и скорость, и значительно дешевле серводвигателей.
Как правило, шаговый электродвигатель – это электромеханическое устройство, которое преобразует сигналы управления в угловое перемещение его ротора с качественной фиксацией в заданном положении. Сегодня современные шаговые двигатели (ШД), по сути, являются синхронными двигателями, не имеющими пусковую обмотку на роторе, что соответственно объясняется частотным пуском самого ШД. Последовательная активация обмоток двигателя порождает дискретные угловые перемещения (т. е. – шаги) ротора. Отличительная особенность этих двигателей – это возможность без датчика обратной связи осуществлять позиционирование по положению.Шаговый двигатель относится к классу так называемых «бесколлекторных» двигателей постоянного тока. Такие двигатели как непосредственно и любые другие бесколлекторные электрические машины, имеют достаточно высокую надежность и весьма внушительный срок службы, что в свою очередь позволяет применять их в самых разных индустриальных сферах. Если сравнивать обычные электродвигатели постоянного тока с шаговыми двигателями, то последние требуют более сложных схем управления, выполняющие абсолютно все коммутации обмоток.

Серводвигатель – это непосредственно двигатель с обратной связью, которой можно управлять, чтобы или достичь требуемой скорости (следовательно, крутящего момента) или же получить необходимый угол поворота. Именно для этой цели устройство обратной связи посылает определенные сигналы в цепь контроллера серводвигателя, сообщая о скорости и соответственно угловом положении. Если в результате наиболее высоких нагрузок скорость окажется гораздо, ниже требуемой величины, то ток будет увеличиваться покуда скорость не достигнет потребной величины. Когда сигнал скорости показывает, что она больше, чем необходимо, то ток соответственно, уменьшается. Если же по положению применена обратная связь, то сигнал о нем используется, чтобы остановить двигатель в тот момент, когда непосредственно ротор приблизится к необходимому угловому положению.Для этого могут использоваться разные типы/виды датчиков, включая кодирующие устройства, например, такие как: потенциометры, тахометры и резольверы. Если применяется датчик положения типа кодирующего устройства или потенциометра, его сигнал вполне может быть дифференцирован для того, чтобы выработать определенный сигнал о скорости.На сегодняшний день сервоприводы используются в высокопроизводительном оборудовании, к примеру, в таких производственных отраслях как: изготовление различных стройматериалов, напитков, упаковки, в полиграфии и подъемно-транспортной технике. Также в последнее время наблюдается тенденция к умножению доли сервоприводов в пищевой промышленности и деревообработке.Решающим фактором использования сервоприводов является не только высокая их динамика, но и возможность получить высокостабильное или точное управление, широкий диапазон регулирования скорости, малые габариты и вес, а также помехоустойчивость.
Для понимания различия между обычным шаговым и серво двигателем давайте рассмотрим работу системы именно с шаговым мотором, на котором непосредственно стоит энкодер (шаговый серводвигатель).Контроллер выдал команду на какое-то количество шагов – повернуть вал. В обычном шаговом двигателе контроллер не в курсе, насколько конкретно шагов повернулся вал (т. к. у него отсутствует обратная связь). Просто он «считает», что вал повернулся правильно. А ведь бывает, что двигатель не смог повернуть вал или силы не хватило или по другой какой-либо причине. Хотя при этом контроллер четко отсчитал импульсы. Это и есть так называемый пропуск шагов в шаговом двигателе.В серводвигателе же подобная проблема полностью отсутствует. Контроллер дал команду вал повернуть настолько-то импульсов и ожидает покуда с энкодера придет сигнал, который подтвердит, что вал повернулся на необходимое число импульсов. При этом если с энкодера поступил, хотя бы на 1 импульс меньше, контроллер все равно будет продолжать подавать команду, пока с энкодера не поступит последний импульс, который выровняет соотношение истинного и заданного количества импульсов. Либо же по истечении заданного периода времени, контроллер выдаст специальный сигнал «Ошибка перемещения».В сервоприводе удержание осуществляется исключительно за счет тока, протекающего непосредственно через обмотку двигателя. При этом в момент удержания половины периода ток поступает в одном направлении, а вторую половину оставшегося времени в ином направлении. Именно за счет этого происходит удержание якоря. В это время по импульсам с энкодера подходит проверка, якорь на месте (на выходе нет ни одного импульса) или же сдвинулся (на выходе энкодера, как правило, появится импульс, вернее код).
Ограничением в использовании шаговых двигателей являются мощность и соответственно скорость, однако по практике, их применение целиком оправданно в недорогих станках имеющих систему ЧПУ, предназначенных для обработки дерева, ДСП, МДФ, пластиков, легких металлов и прочих материалов средней скорости, необходимости производителей станков с ЧПУ по точности и по скорости. Если по каким-либо причинам такие параметры не устраивают, то, как правило, используют сервоприводы. Но стоит заметить, что при этом резко и, причем значительно поднимается стоимость конструкции в целом.Если смотреть с другой стороны, то достичь реальной экономии времени обработки и даже при скоростных сервоприводах, можно за счет экономии на переходах и соответственно оптимизации путей обработки. В остальное же время, скорость весьма ограничена – режимами резки. Между деталью и приводом есть еще и фреза о чем часто забывают.Достоинства сервопривода таковы, что использовать их можно было бы постоянно, когда только возможно, конечно если бы не два существенных недостатка: цена самого комплекта (т. е. блок управления + сервомотор) и сложность настройки, которая временами делает применение сервопривода совершенно – необоснованным.
steepline.ru