





Конструкция синхронного двигателя такая же, как и у синхронного генератора. При подаче тока в трехфазную обмотку статора в нем возникает вращающееся магнитное поле. Частота вращения его определяется формулой:
где f - частота тока питающей сети, р - число пар полюсов на статоре. Ротор, являющийся часто электромагнитом, будет строго следовать за вращаю-щимся магнитным полем, т.е. его частота вращения n2= n1. Рассмотрим принцип действия синхронного двигателя на следующей условной модели (рис. 6.3.1.). Пусть магнитное поле статора будет смоделировано системой вращающихся магнитных полюсов N - S.
Ротор двигателя тоже представляет собой систему электромагнитов S - N, кото-рые "сцеплены" с полюсами на статоре. Если нагрузка на двигателе отсутствует, то оси полюсов статора будут совпадать с осями полюсов ротора ( = 0). Если же к ротору подключена механическая нагрузка, то оси полюсов статора и ротора могут расходиться на некоторый угол. Однако "магнитное сцепление" ротора со статором будет продолжаться, и частота вращения ротора будет равна синхронной частоте статора (n2= n1). При больших значениях ротор может выйти из "сцепления" и двигатель остановится. Главное преимущество синхронного двигателя перед асинхронным - это обеспечение синхронной скорости вращения ротора при значительных колебаниях нагрузки.
Как мы показали выше, синхронное вращение ротора обеспечивается "магнитным сцеплением" полюсов ротора с вращающимся магнитным полем статора. В первый момент пуска двигателя вращающееся магнитное поле статора возникает практически мгновенно. Ротор же, обладая значительной инерционной массой, прийти в синхронное вращение сразу не сможет. Его надо "разогнать" до подсинхронной скорости каким-то дополнительным устройством. Долгое время роль разгонного двигателя играл обычный асинхронный двигатель, механически соединенный с синхронным. Ротор синхронного двигателя приводится во вращение до подсинхронной скорости. Далее двигатель сам втягивается в синхронизм. Обычно мощность пускового двигателя составляет 5-15 % от мощности синхронного двигателя. Это позволяет пускать в ход синхронный двигатель только вхолостую или при малой нагрузке на валу. Применение пускового двигателя мощностью, достаточной для пуска синхронного двигателя под нагрузкой делает такую установку громоздкой и дорогой. В последнее время используется так называемая система асинхронного пускасинхронных двигателей. С этой целью в полюсные наконечники забивают стержни, напоминающие собою короткозамкнутую обмотку асинхронного двигателя (рис. 6.3.2.1).
В начальный период пуска синхронный двигатель работает как асинхронный, а в последующем - как синхронный. В целях безопасности обмотку возбуждения в начальном периоде пуска закорачивают, а на заключительном подключают к источнику по-стоянного тока.
Этот тип двигателя является машиной постоянного тока, хотя принцип действия его напоминает синхронный реактивный двигатель. Как видно из рис. 6.5.1, статор двигателя имеет шесть пар выступающих полюсов.
Каждые две катушки, расположенные на противоположных полюсах статора, образуют обмотку управления, включаемую, в сеть постоянного тока. Ротор - двухполюсный. Если подключить к источнику постоянного тока катушки полюсов 1 - 1', то ротор расположится вдоль этих полюсов. Если задействовать катушки полюсов 2 - 2', а ка-тушки полюсов 1 - 1' обесточить, то ротор повернется и займет положение вдоль полю-сов 2 - 2'. Такой же поворот ротора произойдет, если включить в сеть катушки полюсов 3 - 3'. Так, шагами, ротор будет "следовать" за своей обмоткой управления. Преимуществом шаговых двигателей является то, что в них совершенно отсутствует "самоход". Они поворачиваются и строго фиксируются с шагом, пропорциональ-ным числу полюсов на статоре. Это качество делает его незаменимым в особо точных механизмах (для привода часов, механизмов подачи ядерного топлива в реакторах, в станках с ЧПУ и т.д.).
studfiles.net
Конструкция синхронного двигателя такая же, как и у синхронного генератора. При подаче тока в трехфазную обмотку статора в нем возникает вращающееся магнитное поле. Частота вращения его определяется формулой:
где f - частота тока питающей сети, р - число пар полюсов на статоре. Ротор, являющийся часто электромагнитом, будет строго следовать за вращаю-щимся магнитным полем, т.е. его частота вращения n2= n1. Рассмотрим принцип действия синхронного двигателя на следующей условной модели (рис. 6.3.1.). Пусть магнитное поле статора будет смоделировано системой вращающихся магнитных полюсов N - S.
Ротор двигателя тоже представляет собой систему электромагнитов S - N, кото-рые "сцеплены" с полюсами на статоре. Если нагрузка на двигателе отсутствует, то оси полюсов статора будут совпадать с осями полюсов ротора ( = 0). Если же к ротору подключена механическая нагрузка, то оси полюсов статора и ротора могут расходиться на некоторый угол. Однако "магнитное сцепление" ротора со статором будет продолжаться, и частота вращения ротора будет равна синхронной частоте статора (n2= n1). При больших значениях ротор может выйти из "сцепления" и двигатель остановится. Главное преимущество синхронного двигателя перед асинхронным - это обеспечение синхронной скорости вращения ротора при значительных колебаниях нагрузки.
Как мы показали выше, синхронное вращение ротора обеспечивается "магнитным сцеплением" полюсов ротора с вращающимся магнитным полем статора. В первый момент пуска двигателя вращающееся магнитное поле статора возникает практически мгновенно. Ротор же, обладая значительной инерционной массой, прийти в синхронное вращение сразу не сможет. Его надо "разогнать" до подсинхронной скорости каким-то дополнительным устройством. Долгое время роль разгонного двигателя играл обычный асинхронный двигатель, механически соединенный с синхронным. Ротор синхронного двигателя приводится во вращение до подсинхронной скорости. Далее двигатель сам втягивается в синхронизм. Обычно мощность пускового двигателя составляет 5-15 % от мощности синхронного двигателя. Это позволяет пускать в ход синхронный двигатель только вхолостую или при малой нагрузке на валу. Применение пускового двигателя мощностью, достаточной для пуска синхронного двигателя под нагрузкой делает такую установку громоздкой и дорогой. В последнее время используется так называемая система асинхронного пускасинхронных двигателей. С этой целью в полюсные наконечники забивают стержни, напоминающие собою короткозамкнутую обмотку асинхронного двигателя (рис. 6.3.2.1).
В начальный период пуска синхронный двигатель работает как асинхронный, а в последующем - как синхронный. В целях безопасности обмотку возбуждения в начальном периоде пуска закорачивают, а на заключительном подключают к источнику по-стоянного тока.
Этот тип двигателя является машиной постоянного тока, хотя принцип действия его напоминает синхронный реактивный двигатель. Как видно из рис. 6.5.1, статор двигателя имеет шесть пар выступающих полюсов.
Каждые две катушки, расположенные на противоположных полюсах статора, образуют обмотку управления, включаемую, в сеть постоянного тока. Ротор - двухполюсный. Если подключить к источнику постоянного тока катушки полюсов 1 - 1', то ротор расположится вдоль этих полюсов. Если задействовать катушки полюсов 2 - 2', а ка-тушки полюсов 1 - 1' обесточить, то ротор повернется и займет положение вдоль полю-сов 2 - 2'. Такой же поворот ротора произойдет, если включить в сеть катушки полюсов 3 - 3'. Так, шагами, ротор будет "следовать" за своей обмоткой управления. Преимуществом шаговых двигателей является то, что в них совершенно отсутствует "самоход". Они поворачиваются и строго фиксируются с шагом, пропорциональ-ным числу полюсов на статоре. Это качество делает его незаменимым в особо точных механизмах (для привода часов, механизмов подачи ядерного топлива в реакторах, в станках с ЧПУ и т.д.).
studfiles.net
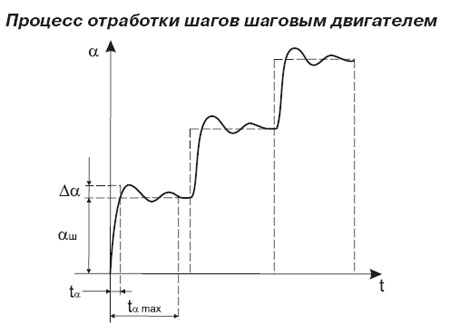
Шаговый двигатель работает устойчиво, если в процессе отработки угла при подаче на его обмотки управления серии импульсов не происходит потери ни одного шага. Это значит, что в процессе отработки каждого из шагов ротор двигателя занимает устойчивое равновесие по отношению к вектору результирующей магнитной индукции дискретно вращающегося магнитного поля статора.
Режим отработки единичных шагов соответствует частоте импульсов управления, подаваемых на обмотки шагового двигателя, при котором шаговый двигатель отрабатывает до прихода xследующего импульса заданный угол вращения. Это значит, что в начале каждого шага угловая скорость вращения двигателя равна 0.
При этом возможны колебания углового вала двигателя относительно установившегося значения. Эти колебания обусловлены запасом кинетической энергии, которая была накоплена валом двигателя при отработке угла. Кинетическая энергия преобразуется в потери: механические, магнитные и электрические. Чем больше величина перечисленных потерь, тем быстрее заканчивается переходный процесс отработки единичного шага двигателем.
В процессе пуска ротор может отставать от потока статора на шаг и более; в результате может быть расхождение между числом шагов ротора и потока статора.
Основными характеристиками шагового двигателя являются: шаг, предельная механическая характеристика и приемистость.
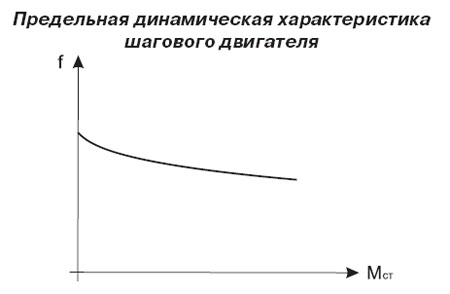
Предельная механическая характеристика — это зависимость максимального синхронизирующего момента от частоты управляющих импульсов.

Приемистость — это наибольшая частота управляющих импульсов, при которой не происходит потери или добавления шага при их отработке. Она является основным показателем переходного режима шагового двигателя. Приемистость растет с увеличением синхронизирующего момента, а также с уменьшением шага, момента инерции вращающихся (или линейно перемещаемых) частей и статического момента сопротивления.
Приемлемость падает с увеличением нагрузки.
Использование
В машиностроении наибольшее распространение получили высокомоментные двухфазные гибридные шаговые электродвигатели с угловым перемещением 1,8°/шаг (200 шагов/оборот) или 0,9°/шаг (400 шаг/об). Точность выставления шага определяется качеством механической обработки ротора и статора электродвигателя. Производители современных шаговых электродвигателей гарантируют точность выставления шага без нагрузки до 5 % от величины шага.
Дискретность шага создаёт существенные вибрации, которые в ряде случаев могут приводить к снижению крутящего момента и возбуждению механических резонансов в системе. Уровень вибраций удаётся снижать при использовании режима дробления шага или при увеличении количества фаз.
Режим дробления шага (микрошаг) реализуется при независимом управлении током обмоток шагового электродвигателя. Управляя соотношением токов в обмотках можно зафиксировать ротор в промежуточном положении между шагами. Таким образом можно повысить плавность вращения ротора и добиться высокой точности позиционирования. Качество изготовления современных шаговых двигателей позволяет повысить точность позиционирования в 10-20 раз.
Шаговые двигатели стандартизованы по посадочным размерам и размеру фланца: NEMA 17, NEMA 23, NEMA 34, … — размер фланца 42 мм, 57 мм, 86 мм, 110 мм соответственно. Шаговые электродвигатели NEMA 23 могут создавать крутящий момент до 30 кгс*см, NEMA 34 до 120 кгс*см и до 210кгс*см для двигателей с фланцем 110 мм.
Шаговые двигатели создают сравнительно высокий момент при низких скоростях вращения. Момент существенно падает при увеличении скорости вращения. Однако, динамические характеристики двигателя могут быть существенно улучшены при использовании драйверов со стабилизацией тока на основе ШИМ.
Шаговые электродвигатели применяются в приводах машин и механизмов, работающих в старт-стопном режиме, или в приводах непрерывного движения, где управляющее воздействие задаётся последовательностью электрических импульсов, например, в станках с ЧПУ. В отличие от сервоприводов, шаговые приводы позволяют получать точное позиционирование без использования обратной связи от датчиков углового положения.
Шаговые двигатели применяются в устройствах компьютерной памяти — НГМД, НЖМД, устройствах чтения оптических дисков.
Датчик поворота
Шаговые двигатели с постоянными магнитами могут использоваться в качестве датчиков угла поворота благодаря возникновению ЭДС на обмотках при вращении ротора.
Преимущества
Главное преимущество шаговых приводов - точность. При подаче потенциалов на обмотки шаговый двигатель повернется строго на определенный угол. К приятным моментам можно отнести стоимость шаговых приводов, в среднем в 1,5-2 раза дешевле сервоприводов. Шаговый привод, как недорогая альтернатива сервоприводу, наилучшим образом подходит для автоматизации отдельных узлов и систем, где не требуется высокая динамика.
Читайте также:
lektsia.com
Частью статора являются обмотки шагового двигателя. Зубчатый блок из магнитномягкого материала расположен на роторе двигателя с переменным магнитным сопротивлением или же постоянный магнит. Коммутация обмоток производиться внешними схемами. В большинстве случаев система шагового двигателя – это такой контроллер, имеющий возможность выводить ротор в фиксированную позицию, другими словами замкнутую по положению систему. Цикличность ротора зависит от его геометрии.
Отличия, принципы действия и типы шаговых двигателей для удобства разделены на три раздела:
- отличия биполярного от униполярного ШД в принципе управления и конструкции;
- реактивные шаговые двигатели и шаговые синхронные двигатели активных типов, принцип действия и их назначение;
- линейные и индукторные (или гибридные) шаговые синхронные двигатели, и их режимы работы.
Различия между биполярным от униполярного шагового двигателя заключается в принципе управления и конструкции. В основном принцип действия их одинаковый, и большинство контроллеров могут работать с этими типами двигателей. Отличие их заключается, во-первых, во время одного оборота ротора, дискретный (шаговый) режимы работы шагового двигателя, совершает n-шагов, а во-вторых, в плавности вращений синхронного двигателя. В системе управления серводвигателей необходимо применять датчик по положению или по скорости обратной связи, которые используется обычно в качестве sin/cos энкодер или резольвер.
Шаговые двигатели используются преимущественно в системах в которых отсутствует обратная связь, во время движения при небольших ускорениях , а синхронные сервомоторы — в высокодинамических скоростных системах. Шаговые двигатели делят на двигатели гибридные с переменным магнитным сопротивлением и на двигатели с постоянными магнитами, которые, как правило, имеют 2-е независимые обмотки, в которых может отсутствовать или присутствовать срединный отвод (рисунок 1).
Конструкция униполярных шаговых двигателей с постоянными магнитами сложнее, чем биполярные и гибридные двигатели, обмотки в них имеют центральный отвод, а биполярные не имеют (рисунок 2). За счет этого упрощения приходится жертвовать сложной реверсированной полярностью каждой пары полюсов его мотора. У шаговых двигателей имеется большой диапазон угловых разрешений. Обычно моторы более грубые вращаются на 90° за шаг, а разрешение прецизионные двигатели имеют — 0,72° или 1,8° на шаг.
Когда контроллер позволяет, то можно использовать полушаговый режим или режим с мелким дроблением шага (режим микрошаговый), в то время как дробные значения напряжений подаются на обмотки, в основном формирующиеся за счет ШИМ-модуляции.
Можно использовать возбуждение одной обмотки в процессе управления, тогда ротор поворачиваться будет на точный (фиксированный) угол, который в точке равновесия удерживается, пока внешний момент не будет превышать момента удержания двигателя. Чтобы правильно управлять биполярным шаговым двигателем, то для этого нужна электрическая схема, выполняющая функцию старта, изменения скорости, стопа и реверса.
Шаговый двигатель в движении показывает последовательность цифровых переключений. Магнитное поле, вращаясь, обеспечивает на обмотках соответствующие переключения напряжения. Потом за этим полем начнет вращение ротор, который соединен с выходным валом двигателя посредством редуктора. Современные характеристики электронных применений соответствуют возрастающим требованиям высокопроизводительных компонентов, которые содержит каждая серия.
Для биполярного шагового двигателя схема управления требует наличия для каждой обмотки мостовой схемы, а также она позволяет менять полярность независимо от напряжения на каждой обмотке.
Для режима с единичным шагом последовательность управления показана на рисунке 3.
Для полушагового управления последовательность показана на рисунке 4.
Скорость максимального движения определяется благодаря физическим возможностям шагового двигателя, она регулируется с помощью изменения размера шага. Чем больше скорость движения, тем больше крупные шаги.
Для перемещения заданного угла или его отработки в системах управления электроприводами используют положение датчика обратной связи по углу исполнительного двигателя или его выходного вала. Предположим, что необходимо синхронный шаговый двигатель использовать в качестве двигателя исполнительного, то в таком случае, можно будет облегчить систему управления двигателем и обойтись без датчика обратной связи, и поэтому пропадает необходимость использовать в ней цифроаналоговых и аналого-цифровых преобразователей. Синхронными двигателями называют шаговые двигатели, преобразующие команду, которая задана в виде импульсов, подвижных частей двигателя без датчиков обратной связи в фиксированное положение, а также в точный (фиксированный) угол поворота двигателя. Шаговый двигатель в пределах 1-го оборота имеет не менее 2-х положений ротора устойчивого равновесия , а его мощность лежит в диапазоне от 1 ватт до 1-го киловатта.
Управление напряжением питания обмоток шагового двигателя представляется в виде последовательности двуполярных или однополярных прямоугольных импульсов, которые поступают от электронного коммутатора. Частота переключений электронного коммутатора соответствует частоте вращения двигателя, а число переключений коммутатора соответствует результирующему углу.
xn--80aafadcflyh2a1a3dzd5bza.xn--p1ai
Шаговый электродвигатель — это синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора.
Шаговые двигатели можно отнести к группе бесколлекторных двигателей постоянного тока. Шаговые двигатели, имеют высокую надежность и большой срок службы, что позволяет использовать их в индустриальных применениях. При увеличении скорости двигателя, уменьшается вращающийся момент. Шаговые двигатели делают больше вибрации, чем другие типы двигателей, поскольку дискретный шаг имеет тенденцию хватать ротор от одного положения к другому. За счет этого шаговый двигатель во время работы очень шумный. Вибрация может быть очень сильная, что может привести двигатель к потери момента. Это связано с тем, что вал находится в магнитном поле и ведет себя как пружина. Шаговые двигатели работают без обратной связи, то есть не используют Энкодеры или резольверы для определения положения. Типы:Существует четыре главных типа шаговых двигателей:
Главным преимуществом шаговых приводов является точность. При подаче потенциалов на обмотки, шаговый двигатель повернется строго на определенный угол. Шаговый привод, можно приравнять к недорогой альтернативе сервоприводу, он наилучшим образом подходит для автоматизации отдельных узлов и систем, где не требуется высокая динамика.
Применение. Шаговые двигателя имеет большую область применения в машиностроении, станках ЧПУ, компьютерной технике, банковских аппаратах, промышленном оборудовании, производственных линиях, медицинском оборудовании и т.д.
Серводвигателя делятся на категории щеточные (коллекторные) и без щеточные (без коллекторные) . Щеточные (коллекторные) серводвигатели могут быть постоянного тока, без коллекторные серводвигатели могут быть постоянного и переменного тока. Серводвигатели с щетками (коллекторные), имеют один недостаток каждые 5000 часов необходима замена щеток. На серводвигателях всегда есть обратная связь, это может быть энкодер или резольвером. Обратная связь необходима, чтобы достичь необходимой скорости, либо получить нужный угол поворота. В случаях высоких нагрузок и если скорость окажется ниже требуемой величины, ток пойдет на увеличение , пока скорость не достигнет нужной величины, если сигнал скорости покажет, что скорость больше, чем нужно, ток, пойдет на уменьшение. При использовании обратной связи по положению, сигнал о положении можно использовать чтобы остановить двигатель, после того, как ротор двигателя приблизится к нужному угловому положению. АС серводвигатель - двигатель переменного тока. В ценообразовании двигатель переменного тока дешевле двигателя постоянного тока. По принципу работы эти двигатели разделяются на синхронные и асинхронные двигатели и коллекторные.В синхронных двигателях переменного тока ротор и магнитное поле вращается синхронно с одинаковой скоростью и в одном направлении с статором, а в асинхронных двигателях переменного тока ротор вращается несинхронно по отношению с магнитным полем. В асинхронном двигателе из-за отсутствия коллектора (щетки) регулировка оборотов происходит за счет изменения частоты и напряжения.
DC серводвигатель - двигатель постоянного тока. Серводвигатели постоянного тока из за своих динамических качеств могут быть использованы приводом непрерывного действия. Серводвигатели постоянного тока могут постоянно работать в режимах старт, остановка и работать в обоих направлениях вращения. Обороты и развиваемый крутящий момент можно изменять путем изменения величины напряжения тока питания или импульсами.
Пример работы двигателя:На данном примере я перескажу вам принцип работы серводвигателя. После того, как вы сгенерировали управляющую программу, она создается в системе G-кодов, то есть ваша линия, окружность или любой созданный вами объект конвертируется в перемещение по координатам X,Y, Z на определённое расстояние. За расстояние отвечают импульсы, которые подаются через блок управления на двигатель. При перемещении любой из осей, например на 100 мм, драйвер (блок управления) подает определённое напряжение на двигатель, вал двигателя (ротор). Вал двигателя соединен с ходовым винтом (ШВП), вращение оборотов двигателя отслеживается энкодер. При вращении ходового винта по любой из осей, потому что при использовании серво, энкодеры (обратная связь) устанавливаются на тех осях, где вы хотите определить положение, на энкодер подаются импульсы, которые считываются системой управления ЧПУ. Системы ЧПУ программируются так, что ни понимают что, например, для перемещения на 100 мм необходимо получить определенное количество импульсов. Пока система ЧПУ не получит нужное количество импульсов на вход драйвера (блока управления) будет подаваться напряжение задания (рассогласование). Когда портал станка проедет заданные 100 мм, система ЧПУ получит нужное количество импульсов и напряжение на входе драйвера упадет до 0 и двигатель остановится. Прошу вас заметить, что преимущество обратной связи в том, что если по какое то либо причине произойдет смещение портала станка, энкодер отправит на систему управления нужное количество импульсов, для подачи нужного напряжения на согласования драйвера (блока управления), и двигатель поменяет угол. Для того что разногласие было равно 0, это помогает удерживать станок в заданной точке с высокой точностью. Не все типы двигателей способны, обеспечивать динамику разгона, нужный крутящий момент и т. п.
| Шаговые двигателиСерво двигателя | ||
|
Срок эксплуатации и обслуживание |
Шаговые двигатели – нет щеток, это увеличивает срок эксплуатации до многих лет, единственным слабым местом являются подшипники, могут работать в большом диапазоне высоких температур. Срок эксплуатации в разы дольше любого типа двигателя. |
Из всех видов серво двигателей, самые дешевые это двигателя коллекторного типа (со щетками), они менее надежны, чем шаговые двигатели и требуют замены щеток примерно через 5000 часов непрерывной работы.Другой тип бесколлекторных сервоприводов производятся по надежности как и шаговые двигателя, отсутствие щеток увеличивает срок эксплуатации, но не уменьшает стоимость ремонта. В некоторых случаях проще и дешевле купить новый двигатель, а не пытаться его отремонтировать. |
|
Ремонт |
Очень тяжело повредить и износить подшипник. Как и в любом двигателе возможно повреждение обмотки двигателя. Из низкой цены проще купить новый шаговый двигатель. |
В некоторых случаях проще и дешевле купить новый двигатель, а не пытаться его отремонтировать. |
|
Точность перемещений |
При использование точных механизмов, может быть не ниже +/- 0.01 мм |
сервоприводы имеют высокую динамическую точность до 1-2мкм и выше (1 мкм = 0.001 мм) |
|
Скорость перемещения |
В лазерно гравировальных станках скорость 20 – 25 метров в минуту. Если мы говорим о фрезерных станках ЧПУ с тяжелыми порталами и балками. Максимальная скорость перемещения до 9 м/мин. |
С использованием сервоприводов в станках с ЧПУ возможно достижение скоростей до 60 м/мин при использование высокосортной механике. |
|
Скорость разгона |
до 120 об/мин за секунду |
до 1000 об/мин за 0,2 секунды |
|
Потеря шагов при повышении скорости и нагрузки |
При высоких скоростях и высоких нагрузках происходит потеря шагов. Эта не проблема возможна при воздействии внешних факторов: ударов, вибраций, резонансов и т.п. |
У серво двигателей присутствует обратная связь, что полностью исключает потерю шагов. |
|
Принудительная остановка (столкновение с препятствием) |
Принудительная остановка шагового двигателя не вызывает у него никаких повреждений |
В случае принудительной остановки серводвигателя, драйвер мотора должен правильно среагировать на данную остановку. В противном случае по обратной связи подается сигнал на доработку не пройденного расстояния, повышается ток на обмотках, двигатель может перегреться и сгореть! |
|
Разница в цене |
По цене шаговый двигатель намного дешевле своего товарища серво двигателя. |
Минимум в 1,5 раз дороже шагового двигателя. |
Каждый тип двигателя предназначен для своей задачи. В некоторых случаях нужно использовать шаговых двигатель, а для некоторых задач необходимо использовать только серво двигатель. В фрезерных станках ЧПУ широко используются оба типа двигателей, просто у каждого из них есть свои задачи, и иногда не целесообразно переплачивать за серво, при небольших объемах производства.
Если же вас не устраивают скоростные характеристики, Вам необходимо рассмотреть фрезерные деревообрабатывающие станки с ЧПУ «АртМастер» 2112, 2515, 3015(авт.) и высокоскоростной фрезерный деревообрабатывающий станок «АртМастер 3015 Racer».
Вы всегда должны для себя понимать, что сервомоторы позволяют вам с экономить время на холостых переходах, при этом вы не должны забывать правильно оптимизировать количество проходов. Скорость фрезеровки всегда зависит от мощности режущего инструмента (электрошпинделя) и типа фрезы. Мы не сможете получить хорошую скорость фрезеровки при низком качестве инструмента. Вы получите либо брак в изделии, либо Вам потребуется постоянная замена режущего инструмента. То есть при использовании высоких скоростей, при обработке материала вы не должны забывать о качестве и типе инструмента для фрезеровки. Дорогой инструмент не только быстрее режет, но и служит дольше. И прошу не забывать другое преимущество серво: высокая скорость и производительность в разы выше, чем у шагового при фрезеровке объёмных изображений (фото), резьбы (фото). При наличии смены инструмента, вакуумного стола вы можете оптимизировать ваше производство и минимизировать отходы.Если вы хотите добиться увеличения объёмов выполненной работы на вашем производстве, решение только одно - сервомоторы, а для старта или изготовления фасадов, дверей, столешниц, и прямолинейного, криволинейного раскроя при объёмах производства от 500-1000 кв.м, вы можете остановить свой выбор на станках с шаговыми двигателями.
artelua.com
В отличие от синхронных машин непрерывного вращения шаговые двигатели имеют на статоре явно выраженные полюса, на которых расположены катушки обмоток управления.Принцип действия шагового двигателя активного типа рассмотрим на примере двухфазного двигателя.
Различают два вида коммутации обмотки шагового двигателя: симметричная и несимметричная.
При симметричной системе коммутации на всех четырех тактах возбуждается одинаковое число обмоток управления.
При несимметричной системе коммутации четным и нечетным тактам соответствует различное число возбужденных обмоток управления.
Ротор у шагового двигателя активного типа представляет собой постоянный магнит, при числе пар полюсов больше 1, выполненный в виде «звездочки».
Число тактов KT системы управления называют количеством состояний коммутатора на периоде его работы T. Как видно из рисунков для симметричной системы управления KT=4, а для несимметричной KT=8.
В общем случае число тактов KT зависит от числа обмоток управления (фаз статора) mу и может быть посчитано по формуле:
KT = mуn1n2,
где: n1=1 — при симметричной системе коммутации;
n1=2 — при несимметричной системе коммутации;
n2=1 — при однополярной коммутации;
n2=2 — при двуполярной коммутации.
При однополярной коммутации ток в обмотках управления протекает в одном направлении, а при двуполярной — в обеих. Синхронизирующий (электромагнитный) момент машины является результатом взаимодействия потока ротора с дискретно вращающимся магнитным полем статора. Под действием этого момента ротор стремится занять такое положение в пространстве машины, при котором оси потоков ротора и статора совпадают. Мы рассмотрели шаговые синхронные машины с одной парой полюсов (р=1). Реальные шаговые микродвигатели являются многополюсными (р>1). Для примера приведем двуполюсный трехфазный шаговый двигатель.
Двигатель с р парами полюсов имеет зубчатый ротор в виде звездочки с равномерно расположенными вдоль окружности 2р постоянными магнитами. Для многополюсной машины величина углового шага ротора равна:
αш=360/Ктр
Чем меньше шаг машины, тем точнее (по абсолютной величине) будет отрабатываться угол. Увеличение числа пар полюсов связано с технологическими возможностями и увеличением потока рассеяния. Поэтому р=4…6. Обычно величина шага ротора активных шаговых двигателей составляет десятки градусов.
china.msk.ru
Электрические машины широко применяют на электрических станциях, в промышленности, на транспорте, в авиации, в системах автоматического регулирования и управления, в быту. Электрические машины преобразуют механическую энергию в электрическую и наоборот, электрическую энергию в механическую. Машина, преобразующая механическую энергию в электрическую, называется генератором. Преобразование электрической энергии в механическую осуществляется двигателями.
Принцип действия электрических машин основан на использовании законов электромагнитной индукции и электромагнитных сил. Если в магнитном поле полюсов постоянных магнитов или электромагнитов поместить проводник и под действием какой-либо силы F1 перемещать его, то в нем возникает Э.Д.С. равная: E = B · l · v, где В — магнитная индукция в месте, где находится проводник, l — активная длина проводника (та его часть, которая находится в магнитном поле), v — скорость перемещения проводника в магнитном поле.
Если этот проводник замкнуть на какой-либо приемник энергии, то в замкнутой цепи под действием Э.Д.С. будет протекать ток, совпадающий по направлению с Э.Д.С. в проводнике. В результате взаимодействия тока I в проводнике с магнитным полем полюсов создается электромагнитная сила Fэ, направление которой определяется по правилу левой руки; эта сила будет направлена навстречу силе, перемещающей проводник в магнитном поле. При равенстве сил F1 = Fэ проводник будет перемещаться с постоянной скоростью. Следовательно, в такой простейшей электрической машине механическая энергия, затрачиваемая на перемещение проводника, преобразуется в энергию электрическую, отдаваемую сопротивлению внешнего приемника энергии, т. е. машина работает генератором.
Та же простейшая электрическая машина может работать двигателем. Если от постороннего источника электрической энергии через проводник пропустить ток, то в результате взаимодействия тока в проводнике с магнитным полем полюсов создается электромагнитная сила Рэ, под действием которой проводник начнет перемещаться в магнитном поле, преодолевая силу торможения какого-либо механического приемника энергии. Таким образом, рассмотренная машина так же, как и любая электрическая машина, обратима, т. е. может работать как генератором, так и двигателем.
Для увеличения Э.Д.С. и электромеханических сил электрические машины снабжаются обмотками, состоящими из большого числа проводов, которые соединяются между собой так, чтобы Э.Д.С. в них имели одинаковое направление и складывались. Э.Д.С. в проводнике будет индуктирована также и в том случае, когда проводник неподвижен, а перемещается магнитное поле полюсов.
 |
Асинхронные двигатели — наиболее распространенные электрические машины. В основном они используются как электродвигатели и являются основными преобразователями электрической энергии в механическую.
Асинхронный двигатель имеет статор (неподвижная часть) и ротор (подвижная часть), разделенные воздушным зазором, ротор крепится на подшипниках. Активными частями являются обмотки; все остальные части — конструктивные, обеспечивающие необходимую прочность, жесткость, охлаждение, возможность вращения и т. п.
По конструкции ротора асинхронные машины подразделяют на два основных типа: с короткозамкнутым ротором и с фазным ротором. Оба типа имеют одинаковую конструкцию статора и отличаются лишь исполнением обмотки ротора. Магнитопровод ротора выполняется аналогично магнитопроводу статора — из электротехнической стали и шихтованным. Фазный ротор используют когда необходимо создать большой пусковой момент. К ротору подводят ток и в результате уже возникает магнитный поток необходимый для создания момента.
На обмотку статора подается напряжение, под действием которого по этим обмоткам протекает ток и создает вращающееся магнитное поле. Магнитное поле воздействует на стержни ротора и по закону магнитной индукции возникает электрический ток т. к. изменяется магнитный поток, проходящий через замкнутый контур ротора. Токи в стержнях ротора создают собственное магнитное поле стержней, которые вступают во взаимодействие с вращающимся магнитным полем статора. В результате на каждый стержень действует сила, которая складываясь по окружности создает вращающийся электромагнитный момент ротора из-за того, что индукционный ток, возникающий в замкнутом контуре ротора, имеет такое направление, что создаваемое им магнитное поле противодействует тому изменению магнитного потока, которым был вызван данный ток. Следовательно и возникает вращение.
Частота вращения ротора не может достигнуть частоты вращения магнитного поля, так как в этом случае угловая скорость вращения магнитного поля относительно обмотки ротора станет равной нулю, магнитное поле перестанет индуцировать в обмотке ротора Э.Д.С. и, в свою очередь, создавать крутящий момент.
 |
На рисунке приведен вид асинхронной машины с короткозамкнутым ротором в разрезе:
Синхронный двигатель не имеет принципиальных конструктивных отличий от асинхронных. На статоре синхронного двигателя помещается трехфазная обмотка, при включении которой в сеть трехфазного переменного тока будет создано вращающееся магнитное поле, число оборотов в минуту которого n = 60f/p, где f — частота напряжения питания привода. На роторе двигателя помещена обмотка возбуждения, включаемая в сеть источника постоянного тока. Либо ротор выполнен из постоянного магнита. Ток возбуждения создает магнитный поток полюсов или в случае с постоянным магнитом, магнитный поток уже создан. Вращающееся магнитное поле, полученное токами обмотки статора, увлекает за собой полюса ротора. При этом ротор может вращаться только с синхронной скоростью, т. е. со скоростью, равной скорости вращения поля статора. Таким образом, скорость синхронного двигателя строго постоянна, если неизменна частота тока питающей сети.
Достоинством синхронных двигателей является меньшая, чем у асинхронных, чувствительность к изменению напряжения питающей сети. У синхронных двигателей вращающий момент пропорционален напряжению сети в первой степени, тогда как у асинхронных — квадрату напряжения. Вращающий момент синхронного двигателя создается в результате взаимодействия магнитного поля статора с магнитным полем полюсов. От напряжения питающей сети зависит только магнитный поток поля статора.
Шаговые двигатели — это электромеханические устройства, преобразующие сигнал управления в угловое (или линейное) перемещение ротора с фиксацией его в заданном положении без устройств обратной связи. По сути шаговый двигатель является синхронным, но отличается подходом управления. Рассмотрим самые распространенные.
 |
Двигатели с постоянными магнитами состоят из статора, который имеет обмотки, и ротора, содержащего постоянные магниты. Чередующиеся полюса ротора имеют прямолинейную форму и расположены параллельно оси двигателя. Благодаря намагниченности ротора в таких двигателях обеспечивается больший магнитный поток и, как следствие, больший момент, чем у двигателей с переменным магнитным сопротивлением. Такой двигатель имеет величину шага 30°. При включении тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга. Для осуществления непрерывного вращения нужно включать фазы попеременно. На практике двигатели с постоянными магнитами обычно имеют 48—24 шага на оборот (угол шага 7,5—15°). Двигатели с постоянными магнитами подвержены влиянию обратной Э.Д.С. со стороны ротора, котрая ограничивает максимальную скорость.
 |
Являются более дорогими, чем двигатели с постоянными магнитами, зато они обеспечивают меньшую величину шага, больший момент и большую скорость. Типичное число шагов на оборот для гибридных двигателей составляет от 100 до 400 (угол шага 3,6—0,9°). Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении. Ротор разделен на две части, между которыми расположен цилиндрический постоянным магнит. Таким образом, зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки — южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для 3,6° двигателей и 8 основных полюсов для 1,8—0,9° двигателей. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент.
Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними. Зависимость между числом полюсов ротора, числом эквивалентных полюсов статора и числом фаз определяет угол шага S двигателя:
S = 360/(Nph × Ph) = 360/N,
где Nph — число эквивалентных полюсов на фазу, равное числу полюсов ротора,Ph — число фаз,N — полное количество полюсов для всех фаз вместе.
 |
Сервопривод — общее название привода, синхронного, асинхронного либо любого другого, с отрицательной обратной связью по положению, моменту и др. параметрам, позволяющего точно управлять параметрами движения. Сервопривод – это комплекс технических средств. Состав сервопривода: привод – например, электромотор, датчик обратной связи – например,датчик угла поворота выходного вала редуктора (энкодер), блок питания и управления (он же преобразователь частоты \ сервоусилитель \ инвертор \ servodrive). Мощность двигателей: от 0,05 до 15 кВт.
Существует понятие «вентильный двигатель». Это всего лишь названия для двигателя, управление которым осуществляется через «вентили» – ключи, переключатели и т. п. коммутационные элементы. Современными «вентилями» являются IGBT-транзисторы использующиеся в блоках управления приводами. Никакого конструктивного отличия нет.
Основным достоинством сервоприводов является наличие обратной связи, благодаря которой такая система может поддерживать точность позиционирования на высоких скоростях и высоких моментах. Также систему отличает низкоинерционность и высокие динамические характеристики, например время переключения от скорости –3 000 об/мин до достижения 3 000 об/мин составляет всего 0,1 с. Современные блоки управления являются высокотехнологическими изделиями со сложной системой управления и могут обеспечить выполнение практически любой задачи.
Характеристики системы сервопривода рассмотрим основываясь на сервоприводах фирмы Delta elc. Серии блока управленияASDA-A и двигателем 400 Вт.
Как видно поддержание момента линейное на всем диапазоне скоростей. Это достигается благодаря использованию синхронного двигателя в высококачественном исполнении.
Величина шага перемещения определяется разрешающей способностью датчика обратной связи, энкодера, а так же блоком управления. Стандартные сервоприводы могут обеспечить шаг в 0,036° т. е. 1/10 000 от оборота, и это на скоростях до 5 000 об/мин.
Самые современные сервоприводы отрабатывают шаг в 1/2 500 000.
| Шаговый двигатель | Серводвигатель | |
 |  | |
| Надежность | Шаговые двигатели обладают высокой надежностью, так как в их конструкции отсутствуют изнашивающиеся детали. Рабочий ресурс двигателя зависит только от ресурса примененных в нем подшипников. | Большинство современных бесколлекторных сервоприводов от известных производителей (Mitsubishi, Siemens, Omron, Delta) отличаются высокой надежностью, порой сравнимой с надежностью шаговых двигателей, даже несмотря на значительно более сложное устройство сервопривода. |
| Эффект потери шагов | Всем шаговым двигателям присуще свойство потери шагов. Данный эффект проявляется в некотором неконтролируемом смещении траектории перемещения инструмента, от необходимой траектории. При изготовлении простых деталей, имеющих малую длину траектории перемещения инструмента и при невысоких требованиях к изделию, в большинстве случаем данным эффектом можно пренебречь. Но при обработке сложных изделий (пресс-формы, резьба и т. п.), где длина траектории может достигать километров!, данный эффект в большинстве случаев будет приводить к неисправимому браку. Данный эффект проявляется при выходе за допустимые характеристики двигателя, при неправильном управлении двигателем, а также при «проблемах» с механикой. Применение современных технологий управления шаговыми двигателями, с применением современной электроники, позволяет полностью устранить данный эффект, но стоимость возрастает. | Эффект потери шагов у сервоприводов полностью отсутствует. Потому, что в каждом сервоприводе имеется датчик положения (энкодер), который постоянно отслеживает положение ротора двигателя и при необходимости выдает команды коррекции положения, на основании которых управляющая электроника, проанализировав данные, полученные с энкодера, вырабатывает необходимые сигналы управления на двигатель. Данный механизм называется обратной связью. |
| Скорость перемещения | При использовании шаговых двигателей в приводах подач в станках с ЧПУ можно добиться скорости 150—300 мм/сек (бывает и больше, но это уже «экзотика»). При максимальных скоростях и при превышении допустимой нагрузки возможно проявление эффекта потери шагов. | Приводы подач станков с ЧПУ на основе серводвигателей позволяют достигать высоких скоростей. Скорость холостого перемещения 0,5—1 м/c является нормальным явлением для сервоприводов. |
| Динамическая точность(Динамическая точность — максимальное отклонение реальной траектории перемещения инструмента от запрограммированной) | Динамическая точность является определяющей характеристикой при обработке сложноконтурных изделий (пресс-формы, резьба и т. п.). Шаговые двигатели отличаются высокой динамической точностью, которая является следствием принципов работы шагового двигателя. Обычно, на хорошей механике, рассогласование не превышает 20 мкм (1 мкм = 0,001 мм) | Высококачественные сервоприводы имеют высокую динамическую точность до 1—2 мкм и выше! (1 мкм = 0,001 мм). Для получения высокой динамической точности необходимо применять сервоприводы, предназначенные для контурного управления, которые точно отрабатывают заданную траекторию. |
| Стоимость | В шаговых двигателях применяются дорогостоящие редкоземельные магниты, а также ротор и статор изготавливаются с прецизионной точностью, и поэтому по сравнению с общепромышленными электродвигателями шаговые двигатели имеют более высокую стоимость. | Применение дорогостоящего датчика положения ротора, а также применение достаточно сложного блока управления обуславливает значительно более высокую стоимость, чем у шагового двигателя. |
| Стоимость систем для создания момента в 2 Нм | Гибридный шаговый двигатель с шагом 1,8° – 12 000 р. | Привод с энкодером обеспечивающий шаг в 0,036°, максимальную скорость 3 000 об/мин — 12 704 р. |
| Блок управления – 9 600 р. | Блок управления – 13 000 р. | |
| Ремонтопригодность | У шагового двигателя может выйти из строя только обмотка статора, а ее замену может произвести только производитель двигателя, так как если двигатель даже только разобрать и снова собрать, он уже не будет работать! Потому, что при разборке двигателя происходит разрыв магнитных цепей внутри двигателя и происходит размагничивание магнитов. Поэтому после сборки двигателя требуется намагничивание внутренних магнитов на специальной установке. | Поврежденный серводвигатель в большинстве случаев проще заменить, чем ремонтировать. Ремонту в основном подвергают только мощные двигатели, имеющие весьма высокую стоимость. |
| Столкновение с препятствием | Столкновение подвижных узлов станка с препятствием, в результате которого происходит остановка шагового двигателя, не взывает у него каких-либо повреждений. | В станке на базе сервоприводов, при столкновении подвижных узлов с препятствием, управляющая электроника определяет, что произошло повышение нагрузки и для компенсации повышенной нагрузки повышает уровень тока, подаваемый на двигатель. При полной принудительной остановке на серводвигатель подается максимальный ток. Поэтому, если управляющая электроника не отслеживает подобную ситуацию, то возможно сгорание двигателя. |
| Преимущества |
|
|
| Недостатки |
|
|
Вывод: сервопривод и шаговый двигатель не являются конкурентами, а каждый занимает свою определенную нишу. Сравним их на основе рынка станков с ЧПУ. Применение шаговых двигателей полностью оправданно для применения в недорогих станках с ЧПУ (в ценовой категории до 10—12 тыс. USD), предназначенных для обработки дерева, пластиков, ДСП, МДФ, легких металлов и других материалов средней скорости.
Применение высококачественных сервоприводов необходимо в высокопроизводительном оборудовании, где главным критерием является производительность. Единственный «недостаток» хорошего сервопривода – это его высокая стоимость. К примеру, станок ATS-760 на шаговых приводах стоит 11 000 $, а эта же модель, но на сервоприводах стоит 17 500 $. Однако возможности получения высокостабильного или точного управления, широкий диапазон регулирования скорости, высокая помехоустойчивость, малые габариты и вес часто являются решающими факторами их применения. Добившись одинаковых качеств от сервопривода и шагового их стоимости станут соизмеримыми при однозначном лидерстве сервопривода.
Источник: https://kipservis.ru/
Обсудить на форумеingeneryi.info










