





Cтраница 1
Применение синхронных двигателей, которые работают с опережающим коэффициентом мощности, может значительно повысить общий коэффициент мощности по предприятию в целом. При отсутствии синхронных двигателей коэффициент мощности, как правило, всегда ниже требуемой величины и приходится применять специальные меры для его повышения. [1]
Применение синхронных двигателей для привода механизмов является одним из наиболее распространенных средств повышения коэффициента мощности. В области гидромеханизации используются высокопроизводительные крупные насосы и землесосы, работающие в относительно стабильном режиме, и поэтому широко применяются синхронные двигатели большой мощности. Гидромеханизированные установки с синхронным приводом на строительстве, в горнорудном и других производствах оказывают весьма существенное влияние на улучшение общего энергетического баланса системы электроснабжения. [2]
Применение синхронных двигателей также улучшает общий режим напряжения в сети. Целесообразное сочетание авторегулируемых - компенсирующих установок и специальных устройств для регулирования напряжения в тех или иных точках сети определяется на основе технико-экономических расчетов; при этом основным критерием является минимум приведенных затрат при соблюдении экономического эффекта от улучшения режима напряжений у электроприемников. [3]
Применение синхронных двигателей с быстродействующими регуляторами возбуждения в функции напряжения на шинах и с коррекцией по току нагрузки позволяет в значительной мере снизить колебания при изменениях нагрузки. [4]
Применение синхронных двигателей на заводах приводит к единственно правильному решению по одновременному использованию их в качестве компенсирующего устройства. [5]
Применение синхронных двигателей для привода рыхлителей бесперспективно, так как эти двигатели не соответствуют требуемым условиям пуска и не допускают регулирования скорости. [6]
Применение асинхронных кб-роткозамкнутых и синхронных двигателей для привода лебедок было ограничено тем, что эти двигатели не допускали высокой частоты включений, необходимой для выполнения не только главных, но и вспомогательных операций при спуске и подъеме труб, а системы их управления не позволяли получать простыми и надежными средствами плавный разгон, реверсирование и снижение частоты вращения привода. [7]
Область применения синхронных двигателей в последнее время асширяется. Их применяют акже независимо от мощности в тех случаях, когда, требуется по-тоянство скорости вращения электропривода. [8]
Особенно целесообразно применение синхронных двигателей в случаях, когда в предприятии имеются крупные компрессорные установки ( не менее 100 кет), преобразовательные подстанции с двигатель-генераторными агрегатами, центральные электронасосные установки или некоторые мощные и длительно работающие производственные механизмы, требующие электроприводов с постоянной скоростью вращения и с более или менее равномерной нагрузкой. [9]
Однако возможность применения синхронных двигателей определяется, с одной стороны, требованиями, предъявляемыми к двигателю механизмом, и, с другой стороны, техническими данными синхронных двигателей, выпускаемых заводами. [10]
В случае применения синхронных двигателей с несколькими обмотками возбуждения могут применяться различные системы управления. В частности, получили развитие системы следящего электропривода с синхронным двигателем продольно поперечного возбуждения. При выполнении условий синфазности регулируемого синхронного двигателя с задатчиком, роль которого выполняет эталонный маломощный вспомогательный синхронный двигатель, на две взаимно перпендикулярные обмотки возбуждения с вых. [12]
Сравнительные расчеты применения синхронных двигателей в качестве компенсирующих устройств показывают, что помимо наименьших капитальных затрат при строительстве в сравнении с другими видами компенсирующих устройств статический конденсатор) синхронные двигатели имеют более экономичные эксалуатационные показатели. [13]
Экономическая эффективность применения синхронных двигателей типа СТД слагается из следующих составляющих. [14]
Наибольшие трудности применения крупных асинхронных ко-роткозамкнутых и синхронных двигателей связаны с режимом автоматического повторного включения. На многих химических производствах по условиям технологического процесса не допускается даже кратковременный перерыв в работе механизма. Электроприводы таких механизмов по надежности электроснабжения относятся к первой категории. При снятии напряжения с работающих двигателей вследствие какой-либо аварийной ситуации в системе электроснабжения двигатели продолжают вращаться в режиме выбега. За время перерыва питания частота вращения снижается незначительно, однако при повторном включении из-за наличия электромагнитного поля ротора возможны значительные броски тока и мо - мента. Кроме того, поскольку повторное автоматическое включение является одновременным для всех двигателей, питающихся от системы шин, где произошел перерыв питания, то из-за больших пусковых токов возможны значительные падения напряжения, затрудняющие вхождение двигателей в синхронный режим. [15]
Страницы: 1 2 3 4 5
www.ngpedia.ru
Устройство синхронных машин
Синхронной машиной называется двухобмоточная электрическая машина переменного тока, одна из обмоток которой присоединена к электрической сети с постоянной частотой, а вторая — возбуждается постоянным током.
У синхронных машин частота вращения магнитного поля равна (синхронна) частоте вращения ротора (  ).
).
Синхронная машина имеет неподвижную часть — статор и подвижную — ротор.
Существует прямое (основное) и обращенное исполнение синхронной машины. Прямое исполнение — обмотка возбуждения расположена на роторе, а рабочая обмотка переменного тока — на статоре. Обращенное исполнение — обмотка возбуждения расположена на статоре, а рабочая обмотка - на роторе.
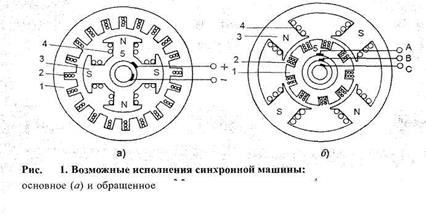
Обмотка переменного тока называется якорной обмоткой, а часть машины, несущая якорную обмотку, называется якорем; часть машины, несущая обмотку возбуждения,— индуктором.
Обращенное исполнение применяется для машины небольшой мощности (2-5 кВт).
Для более крупных машин применяется основное исполнение. В этом случае с помощью скользящего контакта подводится только мощность возбуждения, составляющая 0,3—2 % мощности машины, а не полная мощность, как в обращенном исполнении.
В дальнейшем будем рассматривать прямое исполнение.
Статор машин прямого исполнения включает в себя корпус, выполненный из чугуна или алюминиевого сплава. В корпус запрессован сердечник, выполненный из пластин электротехнической стали. При наружном диаметре более 1 м сердечник собирается из сегментов. В сердечнике выштампованы пазы. В пазах статора размещается многофазная (обычно трехфазная) 2р-полюсная обмотка. Фазы обмотки соединяются обычно в звезду.
На роторе, вал которого опирается на подшипники, располагается обмотка возбуждения. Она имеет такое же число полюсов, как и обмотка статора. Обмотка возбуждения питается постоянным током через два контактных кольца и щетки от постороннего источника - системы возбуждения.
Процессы в синхронной машине при холостом ходе
При холостом ходе ток в обмотке якоря равен нулю. Обмотка возбуждения с током Ifобразует магнитное поле возбуждения, МДС которого равна:
Ff= If Wf
Вследствие нелинейности магнитной характеристики возникают высшие гармоники МДС поля возбуждения. Поэтому принимаются меры по улучшению формы поля возбуждения, чтобы уменьшить содержание высших гармонических, поскольку высшие гармонические, не принимая участия в процессе преобразования энергии, вызывают добавочные потери. Улучшение формы поля возбуждения в явнополюсных машинах достигается выбором благоприятного соотношения между максимальным и минимальным зазором под полюсом, в неявнополюсных — выбором благоприятной относительной длины обмотанной части полюсного деления.
При воздействии поля возбуждения обмотке якоря индуктируется ЭДС Ef , которая содержит высшие гармоники. Искажение синусоидальности приводит к появлению добавочных потерь от высших гармонических. Поэтому ЭДС синхронных генераторов должны быть как можно ближе к синусоидальным.
Уменьшение содержания высших гармонических в кривой ЭДС достигается за счет укорочения шага обмотки якоря, размещения ее катушек в достаточно большом числе пазов, а также соединения фаз обмотки в звезду или треугольник.
В возбужденной машине при холостом ходе возникают механические потери на трение вращающихся частей Pмех, магнитные потери в стали магнитопровода якоря Pст и некоторые добавочные электромагнитные потери Pд.х. Двигатель, приводящий синхронную машину во вращение, должен развивать мощность, равную сумме этих потерь
Pп.д= Pмех+Pст+ Pд.х.
и составляющую 0,3—3 % полной мощности машины.
Синхронный компенсатор
Синхронный компенсатор представляет собой синхронный двигатель, работающий без нагрузки на валу; при этом по обмотке якоря проходит практически только реактивный ток. Синхронный компенсатор может работать в режиме улучшения cosφ или в режиме стабилизации напряжения.
Нагрузка сети носит активно-индуктивный характер – ток нагрузки Iн отстает по фазе от напряжения сети Uc. Для улучшения cosφ сети синхронный компенсатор работает в режиме перевозбуждения. Ток возбуждения регулируется так, чтобы ток якоря I1 синхронного компенсатора опережал на 90° напряжение сети Uc(рис. а) и был примерно равен реактивной составляющей тока нагрузки Iн р. В результате сеть загружается только активным током нагрузки Iн а.
В отличие от батарей конденсаторов компенсатор может компенсировать как индуктивную (при перевозбуждении) так и емкостную (при недовозбуждении) составляющие тока.

В режиме стабилизации напряжения устанавливается ток возбуждения синхронного компенсатора чтобы ЭДС компенсатора Еf равнялась номинальному напряжению сети Ucн (рис. б). В сети имеется ток Iн, создающий падение напряжения ΔU= IнRccosφ + IнXc sinφ, где Rc и Хс — активное и индуктивное сопротивление сети; φ — угол сдвига фаз между векторами напряжения и тока сети.
Если напряжение сети понижается из-за возрастания тока нагрузки и становится меньше Ucн, то синхронный компенсатор забирает из сети реактивный опережающий ток I1 (рис. в). Это уменьшает падение напряжения на величину ΔUк= I1Xc. При повышении напряжения в сети, когда Uc > Ucн, синхронный компенсатор загружает сеть реактивным отстающим током I1 (рис. г), что приводит к увеличению падения напряжения на величину ΔUк= I1Xc. Недостаток метода - синхронный компенсатор загружает линию реактивным током, увеличивая потери в ней.
Синхронные компенсаторы выпускаются мощностью от 10 до 100 МВА и по конструкции имеют следующие отличия от синхронного двигателя:
- не имеют выходного конца вала;
- вал не передает вращающий момент и выполняется менее массивным;
- уменьшен воздушный зазор и размеры обмотки возбуждения;
- имеет более массивную магнитную систему для получения большого значения МДС;
-имеет явнополюсную конструкцию при числе полюсов 6 или 8.
Синхронный компенсатор должен быть оснащен автоматическим регулятором возбуждения, который при изменении режима напряжения в узле так регулирует его ток возбуждения, чтобы напряжение на зажимах компенсатора оставалось постоянным.
Энергетика синхронных машин
Часть мощности, потребляемой синхронной машиной, идет на компенсацию потерь, которые включают в себя:
1. Потери на возбуждение ΔРв..
2. Механические потери ΔРмех — это потери на трение в подшипниках и потери на вентиляцию. Они зависят от частоты вращения.
3. Магнитные потери ΔРст в основном имеют место в сердечнике статора, который подвергается перемагничиванию полем ротора. Они состоят из потерь на вихревые токи и перемагничивание. Потери в стали зависят от значения магнитной индукции, марки и толщины листов стали из которой набран сердечник якоря и частоты перемагничивания.
4. Электрические потери имеют место в обмотках статора 
5. Добавочные потери ΔРдоп учитывают потери на пульсацию магнитного потока, потери, вызванные поверхностным эффектом и др. Они равны 0,25 – 0,5% полезной мощности генератора
Механические и магнитные не зависят от нагрузки. Их называют постоянными. Электрические потери зависят от нагрузки машины, поэтому эти потери называются переменными.
На рисунке приведены энергетические диаграммы синхронных генераторов и двигателей при возбуждении от возбудителя (рис. а), а также от сети переменного тока (рис. а).
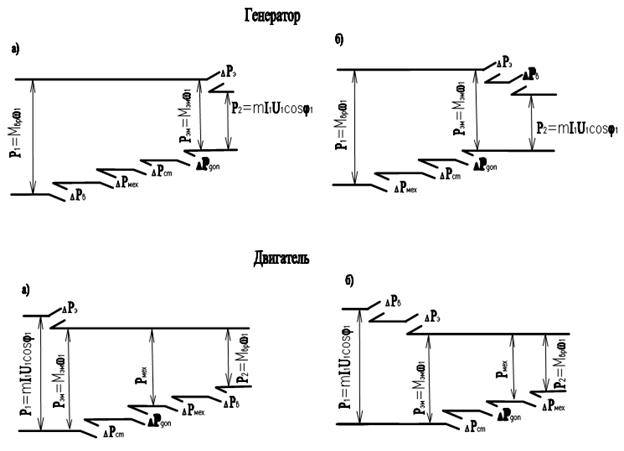
К генераторам подводится механическая мощность Р1= Мврω1, за счет которой покрываются потери холостого хода, состоящие из механических потерь ΔРмех, потерь в стали ΔРст и добавочных потерь ΔРдоп. Если возбудитель приводится от вала генератора, то потери в возбудителе и в цепи возбуждения ΔРв также покрываются за счет механической мощности. Остаток — электромагнитная мощность Рэм= Мэмω1 передается магнитным полем индуктора якорю и преобразуется в его обмотке в электрическую мощность. Часть этой мощности идет на потери в обмотке якоря ΔРэ, а остальная мощность передается на зажимы генератора и является полезной мощностью Р2 =mU1I1 cosφ1 (рис. а). Если генератор выполнен с самовозбуждением, то с его зажимов снимается мощность ΔРв, часть которой идет на потери в цепи возбуждения (рис. б), а остаток — полезная мощность Р2 отдается в сеть.
Коэффициент полезного действия:
У двигателей потребляемая мощность Р1 =mU1I1 cosφ1 поступает из электрической сети. За ее счет покрываются электрические потери ΔРэ в обмотке якоря и мощность возбуждения ΔРв при возбуждении от сети переменного тока. Оставшаяся часть преобразуется в электромагнитную мощность Рэм= Мэмω1, связанную с вращающимся магнитным полем. За счет этого поля покрываются потери в 


 стали ΔРст и добавочные потери ΔРдоп, а остальное передается ротору в виде механической мощности Рмех. Механическая мощность должна покрыть механические потери ΔРмех и мощность ΔРв, потребляемую возбудителем. Оставшаяся часть механической мощности — мощность на валу является полезной мощностью двигателя Р2= Мврω1.
стали ΔРст и добавочные потери ΔРдоп, а остальное передается ротору в виде механической мощности Рмех. Механическая мощность должна покрыть механические потери ΔРмех и мощность ΔРв, потребляемую возбудителем. Оставшаяся часть механической мощности — мощность на валу является полезной мощностью двигателя Р2= Мврω1.
Энергетические диаграммы показывают, что преобразование энергии в синхронной машине более сложно, чем это описывалось простейшими формулами и векторными диаграммами. Подключения синхронного двигателя к сети и синхронизации еще недостаточно, чтобы машина создала вращающий момент на валу - сначала должны быть покрыты потери в обмотке якоря и в стали. Если к валу генератора, синхронизированного с сетью, подведена механическая мощность, то это еще не значит, что эта машина стала отдавать в сеть электрическую мощность - генератор сначала должен покрыть потери в своей обмотке якоря.
Учет всех факторов, включая потери в стали, существенно усложняет и векторные диаграммы, и расчетные формулы. Поэтому в инженерных расчетах обычно пользуются упрощенной теорией синхронной машины, лишь по мере необходимости вводя дополнительные факторы, уточняющие и одновременно усложняющие эту теорию.
Качания синхронных машин
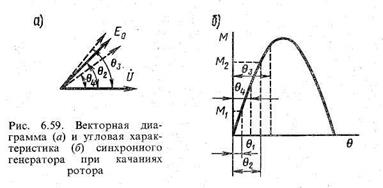
Допустим, что машина работает при некоторой нагрузке и развивает электромагнитный момент M1 =Mвн1, соответствующий углу Θ1 (рис. 6.59, а и б). Если резко увеличить внешний момент до величины Mвн2, то нагрузочный угол будет увеличиваться до величины Θ2, соответствующей новому значению электромагнитного момента M2 =Mвн2. Однако из-за инерции ротора нагрузочный угол, увеличиваясь, достигает значения Θ3 > Θ2, а затем под действием синхронизирующего момента начинает уменьшаться до величины Θ4 < Θ2. В результате возникают колебания нагрузочного угла вокруг установившегося значения Θ2, которые сопровождаются колебаниями частоты вращения ротора, называемые качаниями. Если при качаниях угол Θ превысит критическое значение, то машина выпадет из синхронизма.
 |
Собственные колебания синхронной машины называются свободными колебаниями. Частота собственных колебаний синхронных машин невелика (0,5- 2,0 Гц), что объясняется большим моментом инерции ротора. Период свободных колебаний ротора относительно синхронно вращающегося поля при параллельной работе с сетью: 
где J - момент инерции вращающихся частей;
ω - угловая скорость вращения ротора;
рс=dРЭМ/dq - удельная синхронизирующая мощность;
р – число пар полюсов машины.
При качаниях с изменением угла Θ изменяется мощность машины и ток якоря. На наличие колебаний указывают колебания стрелок амперметра и вольтметра, включенных в цепь якоря. Собственные колебания часто наблюдаются у машин, работающих параллельно с сетью, при холостом ходе.
Для уменьшения амплитуды качаний и ускорения их затухания на роторе располагается короткозамкнутая демпферная (успокоительная) обмотка. При качаниях в демпферной обмотке при изменении частоты вращения ротора индуцируется ЭДС, по ней проходит ток и возникает асинхронный демпфирующий момент: 
где D=ma/ω – коэффициент демпфирования;  .
.
Действие демпферной обмотки подобно действию механического демпфера, потери на трение в котором успокаивают колебания механизма (например, сельсина). При отсутствии демпфирования процесс колебания совершается без потерь энергии, свободные колебания становятся незатухающими, а в некоторых случаях могут даже увеличивать свою амплитуду, т. е. происходит самораскачивание синхронной машины. Из-за явления самораскачивания во многих случаях оказывается невозможной параллельная работа с сетью малонагруженных генераторов малой мощности (до10-20 кВт) без демпферной обмотки.
Колебания ротора синхронной машины могут быть вынужденными, если на него действует периодически изменяющийся внешний момент. Они возникают в синхронных генераторах, приводимых во вращение от поршневых машин, и в синхронных двигателях, служащих для привода поршневых компрессоров. Если частота вынужденных колебаний близка к частоте свободных колебаний, то возникают резонансные явления, при которых колебания угла Θ достигает больших значений и машина выпадает из синхронизма. Поэтому для уменьшения неравномерности вращающего момента на валу устанавливают маховик.
Устройство синхронных машин
Синхронной машиной называется двухобмоточная электрическая машина переменного тока, одна из обмоток которой присоединена к электрической сети с постоянной частотой, а вторая — возбуждается постоянным током.
У синхронных машин частота вращения магнитного поля равна (синхронна) частоте вращения ротора ( ).
Синхронная машина имеет неподвижную часть — статор и подвижную — ротор.
Существует прямое (основное) и обращенное исполнение синхронной машины. Прямое исполнение — обмотка возбуждения расположена на роторе, а рабочая обмотка переменного тока — на статоре. Обращенное исполнение — обмотка возбуждения расположена на статоре, а рабочая обмотка - на роторе.
Обмотка переменного тока называется якорной обмоткой, а часть машины, несущая якорную обмотку, называется якорем; часть машины, несущая обмотку возбуждения,— индуктором.
Обращенное исполнение применяется для машины небольшой мощности (2-5 кВт).
Для более крупных машин применяется основное исполнение. В этом случае с помощью скользящего контакта подводится только мощность возбуждения, составляющая 0,3—2 % мощности машины, а не полная мощность, как в обращенном исполнении.
В дальнейшем будем рассматривать прямое исполнение.
Статор машин прямого исполнения включает в себя корпус, выполненный из чугуна или алюминиевого сплава. В корпус запрессован сердечник, выполненный из пластин электротехнической стали. При наружном диаметре более 1 м сердечник собирается из сегментов. В сердечнике выштампованы пазы. В пазах статора размещается многофазная (обычно трехфазная) 2р-полюсная обмотка. Фазы обмотки соединяются обычно в звезду.
На роторе, вал которого опирается на подшипники, располагается обмотка возбуждения. Она имеет такое же число полюсов, как и обмотка статора. Обмотка возбуждения питается постоянным током через два контактных кольца и щетки от постороннего источника - системы возбуждения.
Области применения синхронных машин
Синхронные машины нашли широкое применение. Преобладающая часть электрической энергии, используемой в народном хозяйстве и в бытовых целях, производится на электростанциях с помощью синхронных трехфазных турбогенераторов и гидрогенераторов.
Синхронные генераторы небольшой мощности с приводом от других типов двигателей (дизельных, внутреннего сгорания, поршневых паровых и др.) используются для питания автономных нагрузок.
Синхронные двигатели применяются в крупных установках (привод поршневых компрессоров, воздуходувок, гидравлических насосов). Большое распространение получили синхронные двигатели малой мощности (особенно синхронные микродвигатели с постоянными магнитами).Синхронные двигатели выпускаются серийно мощностью от 100 кВт до нескольких десятков тысяч киловатт и на частоты вращения от 100 до 3000 об/мин. При частоте вращения 3000 об/мин двигатели выполняются с неявнополюсными роторами, при частотах вращения 1500 об/мин и менее двигатели выполняются с явнополюсными роторами.Освоен серийный выпуск синхронных двигателей малой мощности различных типов в широком диапазоне частот вращения (от нескольких оборотов в минуту до 3000 об/мин) и мощностей (от долей ватта до нескольких сот ватт).Для гидроаккумулирующих электростанций применяются обратимые гидрогенераторы-двигатели. Приводя в движение насос, перекачивающий воду в верхний резервуар, обратимые машины работают в режиме двигателя. Наоборот, приводимые в движение турбиной, в которую поступает вода из верхнего резервуара, эти машины работают в режиме генератора. Мощность обратимых машин может достигать 200—300 МВт.Синхронные компенсаторы выпускаются мощностью от 15 до 160 МВ.А при частотах вращения 750—1000 об/мин. Ротор этих машин имеет явнополюсное исполнение. Охлаждение обычно водородное.
2.Конструкция ротора зависит от частоты вращения машины. При n<1500 об/мин (соответственно 2р>4 при f=50Гц) применяется явнополюсноеисполнение (явно выраженные полюсы). При n=≥1500 об/мин (2р≤4) применяется неявнополюсное исполнение (неявно выраженные полюсы).

Рис. 6.3 Конструкция роторов синхронных машин; а – явнополюсная; б – неявнополюсная; обмотки: 1 – возбуждения; 2 — демпферная
Сердечник явнополюсного ротора состоит из полюсов и обода, к которому они крепятся. Полюсы собираются из штампованных листов электротехнической стали толщиной 1—2 мм, которые стягиваются коваными или литыми нажимными щеками. В отдельных случаях применяются массивные литые полюсы. Полюсы крепятся к ободу с помощью болтов (машины малой и средней мощности с массивным ободом), или полюсных хвостов Т-образной или иной формы. На каждом полюсе устанавливается катушка обмотки возбуждения. Обод ротора выполняется массивным (сварным, литым) или шихтованным из штампованных листов электротехнической стали толщиной 1,5—6 мм. Листы стягиваются шпильками. При наружном диаметре до 2— 4 м обод изготовляется из сплошных листов и насаживается непосредственно на вал. При большом диаметре обод собирается из отдельных сегментов, которые крепятся на сварном остове. Для машин, имеющих значительную осевую длину, в ободе имеются каналы для прохождения охлаждающего воздуха к периферийным зонам ротора. Для крепления обмотки возбуждения полюсные наконечники имеют выступы. Для этих же целей используются межполюсные распорки. Для обеспечения более устойчивой работы в переходных режимах на роторе устанавливается демпферная обмотка. Она расположена в наконечниках полюсов и по своей конструкции аналогична короткозамкнутой обмотке ротора в асинхронном двигателе.
Сердечник неявнополюсного ротора изготовляется как единое целое с хвостовиками (концами вала) из одной поковки из углеродистой стали (диаметром до 800 мм) или легированной стали (диаметром свыше 800 мм). Обмотка возбуждения распределяется по нескольким пазам ротора. Для защиты лобовых частей обмотки возбуждения от центробежных сил применяют бандажные кольца, изготовляемые для крупных турбогенераторов из немагнитной стали (или титана). Бандажное кольцо жестко сопрягается с сердечником или хвостовиком. Обмотка в пазах ротора удерживается немагнитными дюралевыми клиньями. Роль демпферной обмотки в неявнополюсных машинах играют массив ротора и проводящие клинья.
Все промышленные синхронные машины выполняются на стандартизованную частоту 50 Гц.
В зависимости от мощности и частоты вращения номинальное напряжение обмотки якоря (статора) синхронных машин выбирается из числа стандартных напряжений: 0,23; 0,4; 3,15; 6,3; 10,5; 13,8; 15,75 кВ (для генераторов) и 0,22; 0,38; 3; 6; 10 кВ (для двигателей).
В крупных турбогенераторах и гидрогенераторах номинальное напряжение обмотки якоря иногда принимают нестандартным — от 18 до 24 кВ. Номинальное напряжение обмотки возбуждения выбирается в пределах от 24 до 400 В.
С ростом мощности и частоты вращения КПД машины увеличивается. При мощности 100—4000 кВА он составляет 0,9—0,95; в гидрогенераторах и турбогенераторах большой мощности он достигает 0,97—0,99.
infopedia.su
Cтраница 3
По указанным причинам за последние годы расширяется применение синхронных двигателей в, промышленности и на строительстве, где они применяются для привода компрессорных и насосных установок, а также для привода камнедробилок и экскаваторов. [31]
Наивыгоднейшим является I вариант, который предусматривает применение синхронных двигателей, работающих с опережающим коэффициентом мощности. [32]
Серьезные трудности возникают, например, при применении синхронных двигателей для привода крупных вентиляторов даже при отказе от регулирования скорости. Вследствие большого махового момента рабочих колес этих вентиляторов необходимо значительно завышать установленную мощность двигателей; в некоторых случаях асинхронный пуск синхронных двигателей становится невозможным. [34]
В технике имеются отдельные области, для которых возможно применение только управляемых синхронных двигателей. Так, например, при синфазном вращении двух валов требуется отработка угловых рассогласований при синхронной скорости вращения этих валов. Для маломощных синхронных приводов в тех случаях, когда требуется относительно медленный проворот вращающегося вала, используется ручное управление. Последнее заключается в том, что статор сишхроиного двигателя поворачивается, при этом ротор автоматически следит за движением машинного поля статора. [36]
Таким образом, проведенная работа может быть положена в основу применения синхронных двигателей без машинного возбудителя для привода глубиннонасосных установок на нефтяных промыслах. [37]
Привод лентопротяжного механизма в самопишущих приборах отечественного производства выполняется с применением миниатюрного синхронного двигателя. Поэтому точность движения диаграммы по времени зависит в основном от точности поддержания частоты в энергосистеме и автоматически поддерживается одинаковой для всех установленных в энергосистеме самопишущих приборов. Это особенно важно при использовании записей ряда самописцев, установленных в различных точках энергосистемы, при анализе аварий. Абсолютная погрешность по времени не имеет существенного значения. [38]
Большое значение для промышленных предприятий в целях повышения коэффициента мощности имеет применение синхронных двигателей, позволяющих посредством изменения тока возбуждения регулировать потребление реактивной энергии. [39]
В установках значительной мощности ( согни - тысячи киловатт) целесообразно применение синхронных двигателей, позволяющих активно влиять на результирующую реактивную мощность, потребляемую из сети промышленным предприятием. [41]
Обратим внимание на то обстоятельство, что для крупных вентиляторных установок применение синхронных двигателей, даже при исключении регулирования скорости, оказывается не всегда возможным. [43]
Использование этих относительно дешевых двигателей малой мощности может значительно расширить область применения синхронных двигателей на нефтегазоперерабатывающйх заводах. [45]
Страницы: 1 2 3 4 5
www.ngpedia.ru

Синхронный двигатель является электрической машиной, работающей в сети переменного тока. Синхронными электрические машины называются потому, что частота вращения вала ротора точно соответствует частоте магнитного поля, индуцируемого статором.
Как любая вращающаяся электрическая машина, синхронный двигатель состоит из ротора, в данном случае являющегося индуктором и статора, именуемого также якорем. На роторе (индукторе) выполнена обмотка возбуждения, которая питается напряжением постоянного тока через коллекторный механизм. На статоре намотана обмотка переменного тока, которая образует магнитное поле. Само же магнитное поле движеся по кругу, то есть. вращается При взаимодействии с полем индуктора создает вращающий электромагнитный момент на роторе.Первоначально запуск двигателя осуществляется в асинхронном режиме, то есть, с короткозамкнутым ротором. В этом режиме машина, являющаяся по сути асинхронной, разгоняется до скорости, приближающейся к синхронной. Затем на обмотку индуктора подается постоянный ток (перед этим обмотка, естественно, размыкается) и осуществляется так называемый «вход в синхронизм».
Область применения синхронных двигателей обусловлена рядом их особенностей, а именно:
Первое качество делает синхронные двигатели незаменимыми в качестве приводных для прецизионных обрабатывающих станков. Также часто синхронные двигатели используются для привода мощных насосных, компрессорных и вентиляционных установок. Этим же свойством обусловлено их практически исключительное применение в качестве гидрогенераторов и турбогенераторов на электрических станциях.Вторая особенность синхронных двигателей делает привлекательным его использование в качестве источника реактивной энергии, что позволяет гибко регулировать значение коэффициента мощности и уровня напряжения в сети. При правильном заключении договоров на электроснабжение можно получить экономию средств, имея повышенное значение косинуса-фи.При работе синхронного двигателя с коэффициентом мощности, равном единице, двигатель потребляет из сети только активную мощность, за счет чего снижаются потери мощности в питающих линиях электропередачи. Это обусловлено тем, что потери в линиях пропорциональны полной электрической мощности, а величина последней в рассматриваемом случае снижается, что происходит за счет уменьшения реактивной составляющей вплоть до нуля.Работающий на холостом ходу в режиме перевозбуждения синхронный двигатель представляет собой синхронный компенсатор.
То есть, генератор реактивной мощности, который способен обеспечивать потребность реактивной мощности узла потребления, к которому он подключен.
Мощный синхронный двигатель, оснащенный системами автоматической регулировки возбуждения с обратной связью по напряжению, а также форсирования тока возбуждения – это инструмент для регулирования и перераспределения потоков реактивной мощности и уровня напряжения в электрической сети.Выбор синхронных двигателей при проектировании и в процессе реконструкции электросетей крупных потребителей обеспечивает повышение устойчивости работы энергосистемы, разгрузку линий электропередачи, улучшение качества электроэнергии, дает возможность минимизировать затраты на покупку электрической энергии.
elektronchic.ru
Если в асинхронных машинах ротор имел частоту вращения, отличную от частоты вращения магнитного поля статора, то в синхронных эти частоты равны между собой.
Синхронной машиной называется электрическая машина переменного тока, у которой частота вращения ротора n находится в строгом соответствии с частотой сети f1: n = n1 = 60 f1 / p.
На статоре синхронной машины располагается трехфазная обмотка переменного тока, называемая обмоткой якоря, а на роторе располагается обмотка постоянного тока, называемая обмоткой возбуждения. Существует две основных разновидности исполнения обмоток возбуждения: распределенные и сосредоточенные. Распределенные обмотки применяются при неявнополюсной конструкции ротора (рис. 1). В каждом пазу располагается только одна сторона катушки. Поэтому такая обмотка является однослойной.

Рис. 1
Число катушек на полюсном делении равно qf. Они соединяются последовательно, образуя полное число витков обмотки возбуждения wf = pqfwk, где wk — число витков в катушке.
Неявнополюсную конструкцию ротора имеют быстроходные синхронные машины с 2p=2 и 2p=4. Частота вращения ротора таких машин при f1=50Гц соответственно равна 3000 и 1500 об/мин. Для получения необходимой механической прочности неявнополюсные роторы выполняются из массивной стальной поковки.

Рис. 2
В машинах с 2p≥4 ротор имеет явнополюсную конструкцию (рис. 2). Обмотка возбуждения таких машин выполняется сосредоточенной в виде катушек (1) и размещается на сердечниках полюсов (2). Для закрепления катушек на полюсах используются полюсные наконечники (3). Все катушки соединяются последовательно, образуя полное число витков обмотки возбуждения wf = 2pwk.
Для улучшения динамических свойств синхронной машины в полюсные наконечники помещают дополнительную короткозамкнутую обмотку (4), выполняемую аналогично короткозамкнутой обмотке асинхронной машины. Ее называют успокоительной или демпферной. Иногда роль демпферной обмотки выполняют массивные полюсные наконечники.
Синхронные машины могут работать как генераторами, так и электродвигателями. Основная область применения синхронных машин — энергетика, где они используются в качестве генераторов электрической энергии. В зависимости от типа привода синхронные генераторы делятся на турбогенераторы, гидрогенераторы и дизельные генераторы.
Турбогенератор, например, — это генератор, приводимый в движение паровой турбиной, гидрогенератор вращает водяное колесо, а дизельгенератор механически связан с двигателем внутреннего сгорания.
Синхронные электродвигатели широко применяют для привода мощных компрессоров, насосов, вентиляторов. Синхронные микродвигатели используют для привода лентопротяжных механизмов регистрирующих приборов, магнитофонов и так далее.
www.mtomd.info
Cтраница 2
Синхронные электродвигатели изготовляются обычно с опережающим cos 90 8 - 0 9 или cos cpl. Это обстоятельство часто является основной причиной применения синхронных электродвигателей для привода компрессоров. [16]
Синхронные электродвигатели изготовляются обычно с опережающим coscp0 8 - 0 9 или cos cpl. Это обстоятельство часто является основной причиной применения синхронных электродвигателей для привода компрессоров. [17]
Час трудно предвидеть, будут ли это паровые или газовые турбины, но эти приводы должны быть высокооборотными. По-видимому, недостаточно исследован вопрос о возможности применения синхронных электродвигателей, которые, по существу, не имеют ограничения по мощности. Второе направление в развитии питательных насосов может оказаться связанным с тем, что в ближайшем десятилетии получат распространение паротурбинные блоки, работающие в полупиковом и пиковом режимах. К питательным насосам таких блоков будут предъявляться требования высокой надежности, маневренности и неизменной готовности к быстрому пуску после остановок любой продолжительности. Кроме того, необходимо решить задачи, связанные с уменьшением числа ступеней, ужесточением ротора, повышением частоты вращения и напора ступени. [18]
Синхронные электродвигатели обладают третьим положительным свойством - увеличивать перегрузочную способность при резких изменениях нагрузки и поддерживать ее вследствие увеличения тока возбуждения. Ввиду этого для электроприводов с резко переменной нагрузкой особенно целесообразно применение синхронных электродвигателей. [19]
Следующей задачей, имеющей народнохозяйственное значение, является внедрение синхронных электродвигателей для нерегулируемых и регулируемых электроприводов рабочих машин. В настоящее время достигнуты некоторые успехи в выявлении новых областей применения синхронных электродвигателей и внедрения их для промышленных электроприводов, и том числе и небольшой мощности. Проведены также научно-исследовательские работы в области регулирования синхронных электродвигателей при частотном управлении и автоматического регулирования возбуждения электродвигателей, особенно для приводов с ударной нагрузкой. [20]
Они имеют более высокий КПД, способствуют повышению коэффициента мощности нагрузки с. МВт при широком диапазоне частоты вращения - от 100 до 3000 об / мин. Но применение синхронных электродвигателей на электростанциях в то же время усложняет условия эксплуатации из-за наличия щеток, коллектора, автомата гашения поля, и, кроме того, возникают трудности проведения ресинхронизации при кратковременных перерывах в электроснабжении. [21]
Поэтому синхронные электродвигатели, как источник реактивной мощности, следует применять для покрытия пиковой потребности в ней. Основная потребность в реактивной мощности должна покрываться статическими конденсаторами. Бесспорной областью применения синхронных электродвигателей является непосредственный привод тихоходных механизмов. Однако тихоходные синхронные электродвигатели не следует использовать как генераторы реактивной мощности, так как с этим связан значительный дополнительный расход дефицитных материалов и активной энергии. Наиболее целесообразно применение синхронных электродвигателей как регулируемых источников реактивной мощности при 1000 и 750 об / мин. При большем числе оборотов синхронные электродвигатели становятся выполнимы достаточно надежно только на 3000 об / мин и при значительной мощности. [22]
Параллельно с совершенствованием оборудования для глубиннонасосного способа добычи нефти совершенствуются и его электроприводы. Расширяется применение электродвигателей типа АОП2 влагоморозостойкого исполнения с повышенной кратностью пускового момента. Одновременно внедряется качественно новый, наиболее эффективный электропривод станков-качалок с применением бесщеточного синхронного электродвигателя типа СДБО в комплекте с блоками управления и системой АРБ. [23]
Грубая оценка величины токов и мощности короткого замыкания, приведенных в табл. 10, позволяет сделать заключение, что участие системы и синхронных двигателей в подпитке места короткого замыкания приблизительно одинаково. Однако более детальное сравнение расчетных величин показывает, что относительная доля участия в подпитке места к. Следует ожидать, что при применении синхронных электродвигателей единичной мощности 10 и особенно 12 5 МВт, значения токов короткого замыкания от одних только синхронных двигателей могут быть близки или превышать пределы коммутационной способности шкафов единой серии. [24]
Поэтому синхронные электродвигатели, как источник реактивной мощности, следует применять для покрытия пиковой потребности в ней. Основная потребность в реактивной мощности должна покрываться статическими конденсаторами. Бесспорной областью применения синхронных электродвигателей является непосредственный привод тихоходных механизмов. Однако тихоходные синхронные электродвигатели не следует использовать как генераторы реактивной мощности, так как с этим связан значительный дополнительный расход дефицитных материалов и активной энергии. Наиболее целесообразно применение синхронных электродвигателей как регулируемых источников реактивной мощности при 1000 и 750 об / мин. При большем числе оборотов синхронные электродвигатели становятся выполнимы достаточно надежно только на 3000 об / мин и при значительной мощности. [25]
Электродвигатели для насосных станций, как правило, применяются трехфазного тока открытого типа, с влагостойкой изоляцией, с зашитой от попадания влаги, иногда используются и электродвигатели закрытого типа. Низковольтные электродвигатели следует применять асинхронные с ко-роткозамкнутым ротором. Электродвигатели с фазовым ротором могут применяться при недостаточной мощности питающих устройств ( во избежание чрезмерно больших пусковых токов), а также в тех случаях, когда при двигателях с короткозамкнутым ротором возникает недопустимое снижение пускового момента. Синхронные электродвигатели обладают способностью повышать cos f в электросети. Они зачастую применяются с расчетом улучшить cos 9 не только в сети насосной станции, а даже в пределах целого района. Применение синхронных электродвигателей должно иметь технико-экономическое обоснование. [26]
Электродвигатели для насосных станций, как правило, применяются трехфазного тока открытого типа, с влагостойкой изоляцией, с защитой от попадания влаги, иногда используются и электродвигатели закрытого типа. Низковольтные электродвигатели следует применять асинхронные с короткозамк-нутым ротором. Электродвигатели с фазовым ротором могут применяться при недостаточной мощности питающих устройств ( во избежание чрезмерно больших пусковых токов), а также в тех случаях, когда при двигателях с короткозамкнутым ротором возникает недопустимое снижение пускового момента. Синхронные электродвигатели обладают способностью повышать costp в электросети. Они зачастую применяются с расчетом улучшить cos f не только в сети насосной станции, а даже в пределах целого района. Применение синхронных электродвигателей должно иметь технико-экономическое обоснование. [27]
Поэтому сравнение номинальных экономических показателей следует вести по величине вышеуказанного коэффициента о. Однако это сравнение дает правильные результаты только тогда, когда оно применяется для сравнения двух серий однотипных двигателей. Не следует пользоваться этим коэффициентом для сравнения асинхронного электродвигателя с синхронным. Такое сравнение всегда дает результат в пользу синхронного электродвигателя. Преимущества синхронного электродвигателя начинают казаться еще более существенными, если учитывается увеличение мощности генераторов, установленных на электростанции. На оспованиии этих результатов делается кажущийся бесспорным вывод о технико-экономической целесообразности применения синхронных электродвигателей во всех тех случаях, когда применимы асинхронные короткозамкнутые электродвигатели, в том числе при мощности до 100 кет. При таком сравнении станет вполне ясным, что при мощности до 100 кет применение синхронных электродвигателей экономически нецелесообразно. [28]
Поэтому сравнение номинальных экономических показателей следует вести по величине вышеуказанного коэффициента о. Однако это сравнение дает правильные результаты только тогда, когда оно применяется для сравнения двух серий однотипных двигателей. Не следует пользоваться этим коэффициентом для сравнения асинхронного электродвигателя с синхронным. Такое сравнение всегда дает результат в пользу синхронного электродвигателя. Преимущества синхронного электродвигателя начинают казаться еще более существенными, если учитывается увеличение мощности генераторов, установленных на электростанции. На оспованиии этих результатов делается кажущийся бесспорным вывод о технико-экономической целесообразности применения синхронных электродвигателей во всех тех случаях, когда применимы асинхронные короткозамкнутые электродвигатели, в том числе при мощности до 100 кет. При таком сравнении станет вполне ясным, что при мощности до 100 кет применение синхронных электродвигателей экономически нецелесообразно. [29]
Страницы: 1 2
www.ngpedia.ru
Cтраница 2
Практический интерес представляет применение синхронного двигателя в режиме регулируемого емкостного элемента ( рис. 15.18 / 0 и / / в г) - синхронного компенсатора. [16]
Наиболее целесообразно для привода применение синхронного двигателя. В приборах используется однофазный синхронный двигатель ( двигатель Уоррена) с асинхронным пуском. Ротор двигателя при частоте сети в 50 гц совершает 3000 об / мин. Для уменьшения числа оборотов применяется редуктор с зубчатой передачей. Выходная ось редуктора делает 1 - 2 об / мин и развивает момент 1000 Г - см, потребляя при этом мощность 5 вт. Изменение скоростей производится сменными зубчатыми колесами. Наряду со сменными колесами применяют коробки скоростей, в которых скорость изменяется в 60 раз. Таким образом, скорость в миллиметрах в час заменяется скоростью с тем же количеством миллиметров в минуту. Ленто-собирающий механизм приводится в движение от того же двигателя. При использовании других двигателей необходима установка специальных регуляторов, изменяющих скорость вращения ротора двигателя. Применение центробежных регуляторов позволяет получить большую точность движения ленты. [17]
Для механизмов поршневого типа применение синхронных двигателей определяется также тем обстоятельством, что для них выпускается специальная серия тихоходных синхронных машин с повышенным маховым моментом Применение этих двигателей позволяет без дополнительного маховика выровнять график нагрузки, равномерность которого зависит от угла поворота кривошипа и конструктивного исполнения механизма. [18]
Для механизмов поршневого типа применение синхронных двигателей определяется также тем обстоятельством, что для них выпускается специальная серия тихоходных синхронных машин с повышенным маховым моментом. Применение этих двигателей позволяет без дополнительного маховика выровнять график нагрузки, равномерность которого зависит от угла поворота кривошипа и конструктивного исполнения механизма. [19]
Наиболее целесообразно для привода применение синхронного двигателя. В приборах используется однофазный синхронный двигатель ( двигатель Уоррена) с асинхронным пуском. Ротор двигателя при частоте сети в 50 щ совершает 3000 об / мин. Для уменьшения числа оборотов применяется редуктор с зубчатой передачей. Выходная ось редуктора делает 1 - 2 об / мин и развивает момент 1000 Г - см, потребляя при этом мощность 5 вт. Изменение скоростей производится сменными зубчатыми колесами. Наряду со сменными колесами применяют коробки скоростей, в которых скорость изменяется в 60 раз. Таким образом, скорость в миллиметрах в час заменяется скоростью с тем же количеством миллиметров в минуту. Ленто-собирающий механизм приводится в движение от того же двигателя. При использовании других двигателей необходима установка специальных регуляторов, изменяющих скорость вращения ротор а двигателя. Применение центробежных регуляторов позволяет получить большую точность движения ленты. [20]
Нами было проверена возможность применения синхронных двигателей с возбуждением от полупроводниковых выпрямителей и для привода экскалаторов, которые предъявляют к приводному двигателю значительно более жесткие динамические требования, чем центробежный насос. [22]
Есть основание утверждать, что применение синхронных двигателей СТД с бесщеточной системой возбуждения значительно повысит надежность и экономичность электропривода центробежных высокопроизводительных агрегатов нефтеперекачивающих станций магистральных нефтепроводов. [23]
Эффективным средством снижения колебаний напряжения является применение синхронных двигателей и компенсаторов, обладающих естественным регулирующим эффектом, проявляющимся в снижении колебаний напряжения при ударной нагрузке. [24]
В дальнейшем все больше должно расширяться применение синхронных двигателей, даже и для механизмов с регулируемой скоростью, где синхронный двигатель будет получать питание от преобразователей частоты. Должны совершенствоваться регулируемые электроприводы постоянного тока с двигателями, получающими питание от ионных и полупроводниковых преобразователей и магнитных усилителей. [25]
В дальнейшем все больше должно расширяться применение синхронных двигателей, даже и для механизмов с регулируемой скоростью, где синхронный двигатель будет получать питание от преобразователей частоты. [26]
Повышение коэффициента мощности сети достигается: применением синхронных двигателей, повышением загрузки малозагруж-ных асинхронных двигателей или заменой последних двигателями меньшей мощности, отключением трансформаторов при загрузке менее 30 % с переводом их нагрузки на другие трансформаторы, улучшением качества ремонта асинхронных двигателей и трансформаторов. [28]
Весьма серьезной и трудной задачей в применении синхронных двигателей является вопрос их пуска и синхронизации с питающей сетью. [29]
Страницы: 1 2 3 4 5
www.ngpedia.ru








