Читать все новости ➔
При включении и выключении двигателей постоянного тока (ДПТ), работающих в паре с пластмассовыми редукторами, возникает удар, который постепенно разрушает редуктор. Предлагаемое устройство позволяет плавно подавать и снимать нагрузку с редуктора, и может быть использовано для регулировки скорости в ДПТ, плавного пуска и остановки ДПТ, например, при закрытии/открытии жалюзи, подъема/опускания ролетов и в других т.п. устройствах.

Детский электрический автомобиль
Устройство разработано для детских электрических автомобилей с питанием от аккумуляторной батареи 6 В 10 А*ч. Автомобиль управляется по радиоканалу с пульта управления, находящимся в руках родителя, идущего рядом с автомобилем. Для того чтобы маленькие дети не пугались при движении с большой скоростью, устройство снабжено переключателем скоростей. Поскольку в устройстве применено питание двигателя импульсами ШИМ, то скорости переключаются подачей на ДПТ импульсов с заполнением 50%, 60%, 80% и 100%.
Предлагаемое устройство разрабатывалось с условием минимального изменения в электрической схеме автомобиля.
Устройство разработано на микроконтроллере РIС16F676. Алгоритм работы программы микроконтроллера показан на рис.1. После пуска и инициализации микроконтроллера определяется установленная скорость и включается флаг выбранной скорости. Далее определяется направление движения: прямой ход, реверсивный ход, либо отсутствие движения - стоп, и устанавливаются соответствующие флаги направления.
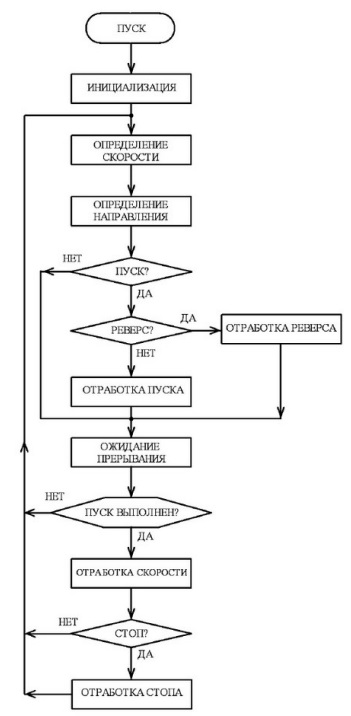
Рис. 1
Если направление движения не выбрано, то сигнала «Пуск» нет, и программа переходит на ожидание прерывания. Если «Пуск» включен, то по флагу определяется направление движения и отрабатывается прямой ход или обратный.
Длительность управляющего импульса пуска при прямом и обратном ходе формируется одинаково, но на разные выходы. Один выход, который включает «земляной» провод двигателя, включается сразу, а на втором выходе длительность импульса включения увеличивается после каждого прерывания. Чем большее число прерываний произошло с момента начала пуска, тем на большее значение увеличивается длительность импульса.
Реализовано это с помощью подпрограммы задержки 37 мкс, умноженное на число регистра «сек», имеющего переменное значение, и изменяющееся после каждого прерывания. Прерывание по переполнению таймера ТМR0 происходит через 4 мс, делится делителем на 10 и увеличивает счетчик «сек». Таким образом, счетчик «сек» увеличивается на единицу через 40 мс. Значение этого счетчика при пуске выбрано равным 55, но может быть изменено пользователем в любую сторону. При данном значении счетчика «сек» время пуска равно 2,25 с, а длительность импульса плавно увеличивается до 75% полной мощности двигателя.
После отработки части пуска ожидается прерывание, и, если пуск еще не завершен, программа возвращается на определение скорости и направления. Если пуск выполнен, то программа отрабатывает выбранную скорость с частотой ШИМ, равной 125 Гц. Отработка скорости выполняется аналогично отработке пуска, но с постоянным временем задержки. Но если при пуске время задержки увеличивает длительность выходного импульса, то при работе время задержки определяет длительность паузы. Это необходимо для того, чтобы при отработке «стопа» еще больше увеличивать время паузы, сокращая таким образом длительность выходного импульса.
Если включен флаг «стопа», то при прерывании изменяются значения делителей. Делитель на 10 становится делителем на 1, а значение регистра «сек» может принимать значение либо 50, либо 70. Это зависит от включенного флага скорости. При скорости 50% регистр «сек» принимает значение 50, так как при больших значениях происходит перерегулировка и длительность паузы становится больше длительности импульса работы. При этом вместо того, чтобы уменьшать значение длительности импульса, она начинает возрастать. При таких значениях регистра «сек» время остановки двигателя равно 0,2 с (оно может быть изменено пользователем в любую сторону уменьшением или увеличением до 255 значения регистра «сек»), а длительность выходного импульса плавно уменьшается до нуля.
После отработки длительности импульса скорости или стопа программа повторяется с определения скорости.
Принципиальная электрическая схема устройства показана на рис.2. Выходы микроконтроллера DD1 RC0-RC3 управляют ключами VT1-VT4, которые открывают полевые транзисторы VT5-VT8, подающие напряжение в необходимой полярности на двигатель постоянного тока М1. На входы RA4, RA5 ИМС DD1 через переключатели SA1, SA2 подается лог. «0», определяя выбранную скорость. Программно входы RA4, RA5 подтянуты внутренними резисторами микроконтроллера к плюсу питания. Значения выбранных скоростей в зависимости от состояния входов приведены слева внизу на рис.2.
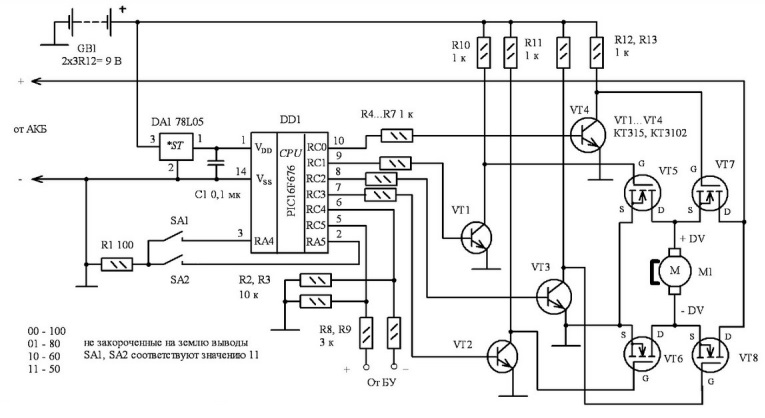
Рис. 2
На входы RC4, RC5 также подается напряжение от БУ автомобиля, определяя выбранное направление движения. Поскольку при полностью заряженной аккумуляторной батарее (АКБ) автомобиля напряжение на ней превышает максимально допустимое для входов микроконтроллера, то установлены делители напряжения R2, R9 и R3, R8.
Вначале был изготовлен вариант устройства с питанием от АКБ автомобиля, но при уменьшении напряжения на АКБ вследствие ее разряда полевые транзисторы открывались не полностью, и их внутреннее сопротивление увеличивалось. Увеличивалось и падение напряжения на транзисторах, и они грелись. Поэтому для питания микроконтроллера и ключевых транзисторов была установлена дополнительная батарея GB1 с напряжением 9 В. Стабилизатор напряжения DA1 необходим только для питания ИМС микроконтроллера DD1. Потребляемый ток от батареи GB1 составляет 15...25 мА. Меньшее потребление тока будет при максимальной скорости вращения двигателя.
Схема подключения устройства в сеть автомобиля показана на рис.3. Пунктиром показано штатное соединение. Под сиденьем автомобиля имеется ниша для второго АКБ и много свободно го места. Сняв сиденье и крышку ниши АКБ, увидите пару проводов, идущих от АКБ, и пару проводов, идущих к двигателю. Один провод, как правило, черный - «минусовой», а второй провод - красный (может быть и желтым, белым) - «плюсовой». В назначении проводов можно убедиться, посмотрев на клеммы АКБ. Провод, идущий от БУ к двигателю, необходимо отпаять от двигателя и припаять к плате. Поскольку провод толстый, то лучше предварительно припаять к нему тонкие провода, которые легко паять к плате. Провода питания, идущие от АКБ к плате и от платы на двигатель, необходимо брать сечением не менее 1 мм2. Выключатель напряжения SA3 лучше установить на крышке ниши АКБ под сиденьем или сзади корпуса автомобиля. Разводку 9 В питания можно выполнить любым монтажным проводом. Батарею GB1 и плату можно закрепить в любом удобном месте.
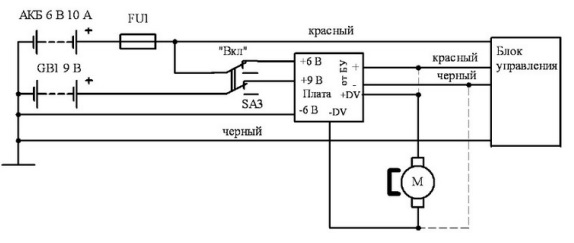
Рис. 3
Печатная плата устройства и схема расположения элементов показаны на рис.4 и рис.5 соответственно.
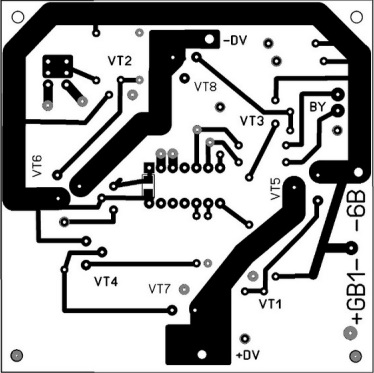
Рис. 4
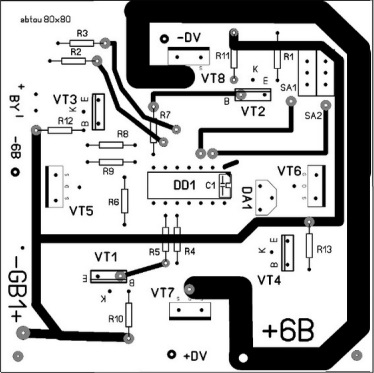
Рис. 5
МОSFЕТ-транзисторы \/Т5-\/Т8 могут быть любыми импортными с буквенным индексом L, с током стока не менее 10 А или отечественные с аналогичными параметрами. Чем больше допустимый
ток стока, тем меньших размеров нужен радиатор для транзистора. При 10-кратном запасе по току, радиатор может вообще не понадобиться. Конечно, это при условии, что транзистор открывается полностью. Большую нагрузку испытывают транзисторы, работающие в ключевом режиме, т.е. VT7, VТ8.
Транзисторы VT1-VT4 могут быть любыми структуры n-р-n. Переключатели скоростей SА1, SА2 лучше заменить одним движковым и установить его на передней панели автомобиля. В качестве батареи GB1 лучше применить 2 батареи типа 3R12, которых хватит на весь сезон.
Перед подачей напряжения на БУ автомобиля, необходимо подать напряжение на плату устройства. Напряжение питания 6 В и 9 В на плату должно подаваться одновременно. При движении вперед и переключении назад сначала отрабатывается время стопа, затем время пуска в выбранном направлении. При выключении движения отрабатывается время стопа, а при включении - время пуска.
Скачать файлы abtou.asm и abtou.hex, а также печатная плата в формате .lay
Автор: Николай Заец, г. Азов, Ростовской обл.
Источник: Радиоаматор №5, 2015
meandr.org
 Крупнее Рассмотрим схему поподробнее. Итак, СИФУ (Система Импульсно — Фазового Управления) — преобразует синусоидальное напряжение сети в серию прямоугольных импульсов, идущих на управляющие электроды силовых тиристоров. При включении блока управления переменное напряжение величиной 14-16в поступает на мостовой выпрямитель D1, где преобразуется в пульсирующее напряжение, служащее не только для питания схемы, но и для синхронизации работы привода. Диод D2 препятствует сглаживанию импульсов конденсатором С1. Далее импульсы поступают на «детектор нуля» — DA1.1, собранного на одном ОУ микросхемы LM324, работающего в режиме компаратора. Пока нет импульса, напряжения на прямом и инверсном входах примерно равны и компаратор находиться в сбалансированном состоянии. При прохождении фазы через «0», на инверсном входе компаратора DA1.1 играющего роль «детектора нуля» появляются импульсы, переключающие компаратор, в результате чего на выходе DA1.1 вырабатываются прямоугольные синхроимпульсы, период следования которых жестко привязан к похождению фазы через «0». Ниже представлены осциллограммы, поясняющие принцип работы.
Крупнее Рассмотрим схему поподробнее. Итак, СИФУ (Система Импульсно — Фазового Управления) — преобразует синусоидальное напряжение сети в серию прямоугольных импульсов, идущих на управляющие электроды силовых тиристоров. При включении блока управления переменное напряжение величиной 14-16в поступает на мостовой выпрямитель D1, где преобразуется в пульсирующее напряжение, служащее не только для питания схемы, но и для синхронизации работы привода. Диод D2 препятствует сглаживанию импульсов конденсатором С1. Далее импульсы поступают на «детектор нуля» — DA1.1, собранного на одном ОУ микросхемы LM324, работающего в режиме компаратора. Пока нет импульса, напряжения на прямом и инверсном входах примерно равны и компаратор находиться в сбалансированном состоянии. При прохождении фазы через «0», на инверсном входе компаратора DA1.1 играющего роль «детектора нуля» появляются импульсы, переключающие компаратор, в результате чего на выходе DA1.1 вырабатываются прямоугольные синхроимпульсы, период следования которых жестко привязан к похождению фазы через «0». Ниже представлены осциллограммы, поясняющие принцип работы.  Сверху вниз: КТ1, КТ2, КТ3. Схема была просимулированна в программе Multisim 11. Вот файл проекта. Можно скачать, запустить и посмотреть как работает данный узел. Далее синхроимпульсы поступают на интегратор с транзисторным ключом (С4, Q1), где и вырабатывается пилообразное напряжение. В момент прохождения фазы через «0» синхроимпульс открывает транзистор Q1, который разряжает конденсатор С4. После спада импульса транзистор закрывается и происходит заряд конденсатора до прихода следующего синхроимпульса, в результате чего на коллекторе Q1 (осцил. КТ4). формируется линейно нарастающее пилообразное напряжение, стабилизированное генератором стабильного тока выполненного на полевом транзисторе T1. Амплитуда „пилы“ равное 9в выставляется подстроечным резистором RP1. Напряжение „пилы“ поступает на прямой вход компаратора DA1.2. Напряжение задания поступает на инверсный вход компаратора DA1.2 и в момент, когда пилообразное напряжение превышает величину напряжения на инверсном входе компаратора, компаратор переключиться и на выходе компаратора формируется импульс (осцил. КТ4). Импульс дифференцируется через цепочку R14, C6 и поступает на базу транзистора Q2. Транзистор открывается и на импульсном трансформаторе Tr1 формируются импульсы открытия силовых тиристоров. Увеличивая (уменьшая) напряжение задания, меняется скважность импульсов в КТ5. Вот осциллограммы.
Сверху вниз: КТ1, КТ2, КТ3. Схема была просимулированна в программе Multisim 11. Вот файл проекта. Можно скачать, запустить и посмотреть как работает данный узел. Далее синхроимпульсы поступают на интегратор с транзисторным ключом (С4, Q1), где и вырабатывается пилообразное напряжение. В момент прохождения фазы через «0» синхроимпульс открывает транзистор Q1, который разряжает конденсатор С4. После спада импульса транзистор закрывается и происходит заряд конденсатора до прихода следующего синхроимпульса, в результате чего на коллекторе Q1 (осцил. КТ4). формируется линейно нарастающее пилообразное напряжение, стабилизированное генератором стабильного тока выполненного на полевом транзисторе T1. Амплитуда „пилы“ равное 9в выставляется подстроечным резистором RP1. Напряжение „пилы“ поступает на прямой вход компаратора DA1.2. Напряжение задания поступает на инверсный вход компаратора DA1.2 и в момент, когда пилообразное напряжение превышает величину напряжения на инверсном входе компаратора, компаратор переключиться и на выходе компаратора формируется импульс (осцил. КТ4). Импульс дифференцируется через цепочку R14, C6 и поступает на базу транзистора Q2. Транзистор открывается и на импульсном трансформаторе Tr1 формируются импульсы открытия силовых тиристоров. Увеличивая (уменьшая) напряжение задания, меняется скважность импульсов в КТ5. Вот осциллограммы.  Но никаких импульсов в КТ5 мы не увидим до тех пор, пока не нажмем кнопку „Пуск“ — S1. Когда кнопка не нажата, напряжение питания +12в через нормально замкнутые контакты S1 по цепочке R12, D3 поступает на инверсный вход DA1.2 и равно около 11в. Так как это напряжение превышает напряжение „пилы“ равное 9в, компаратор запирается, и управляющие импульсы открытия тиристоров не формируются. Для предотвращения аварии и выхода из строя двигателя, в случае если оператор не вывел на «0» регулятор оборотов, в схеме предусмотрен узел разгона C5, R13 служащий для плавного разгона двигателя. В режиме «Пуск», схема работает следующим образом: при нажатии кнопки «Пуск» нормально закрытые контакты размыкаются и конденсатор С5 по цепочке — «земля», R13, — С5 начинает плавно заряжаться и напряжение на отрицательной обкладке конденсатора плавно стремиться к нулю. Одновременно, напряжение на инвертирующем входе DA1.2 плавно возрастает до величины, определяемой напряжением задания, и компаратор начинает вырабатывать управляющие импульсы силовых тиристоров. Время заряда определяется номиналами C5, R13. Если в процессе работы двигателя необходимо изменить его обороты, чтобы избежать резких бросков оборотов — в схеме предусмотрен узел «разгона — торможения» R21, C8, R22. При увеличении (уменьшении) напряжения задания, конденсатор С8 плавно заряжается (разряжается) что предотвращает резкий «наброс» напряжения на инверсном входе усилителя и как следствие предотвращает резкий бросок оборотов двигателя. Теперь рассмотрим принцип работы регулятора оборотов. Регулятор предназначен для поддержания постоянных оборотов двигателя в зоне регули-рования. Регулятор представляет собой дифференциальный усилитель с суммированием двух напряжений: напряжения задания и напряжения обратной связи. Напряжение задания задается резистором RP1 и поступает через фильтр R20, C8, R21, выполняющий одновременно функции узла «разгона — торможения», поступает на инверсный вход регулятора ОУ DA1.3. При увеличении напряжения задания на выходе ОУ DA1.3 линейно уменьшается выходное напряжение. Выходное напряжение регулятора поступает на инверсный вход компаратора СИФУ DA1.2 где, суммируясь с импульсами пилообразного напряжения, преобразуется в серию прямоугольных импульсов идущих на управляющие электроды тиристоров. При увеличении (уменьшении) напряжения задания увеличивается (уменьшается) и выходное напряжение на выходе силового блока. На этом графике представлена зависимость оборотов двигателя от напряжения задания.
Но никаких импульсов в КТ5 мы не увидим до тех пор, пока не нажмем кнопку „Пуск“ — S1. Когда кнопка не нажата, напряжение питания +12в через нормально замкнутые контакты S1 по цепочке R12, D3 поступает на инверсный вход DA1.2 и равно около 11в. Так как это напряжение превышает напряжение „пилы“ равное 9в, компаратор запирается, и управляющие импульсы открытия тиристоров не формируются. Для предотвращения аварии и выхода из строя двигателя, в случае если оператор не вывел на «0» регулятор оборотов, в схеме предусмотрен узел разгона C5, R13 служащий для плавного разгона двигателя. В режиме «Пуск», схема работает следующим образом: при нажатии кнопки «Пуск» нормально закрытые контакты размыкаются и конденсатор С5 по цепочке — «земля», R13, — С5 начинает плавно заряжаться и напряжение на отрицательной обкладке конденсатора плавно стремиться к нулю. Одновременно, напряжение на инвертирующем входе DA1.2 плавно возрастает до величины, определяемой напряжением задания, и компаратор начинает вырабатывать управляющие импульсы силовых тиристоров. Время заряда определяется номиналами C5, R13. Если в процессе работы двигателя необходимо изменить его обороты, чтобы избежать резких бросков оборотов — в схеме предусмотрен узел «разгона — торможения» R21, C8, R22. При увеличении (уменьшении) напряжения задания, конденсатор С8 плавно заряжается (разряжается) что предотвращает резкий «наброс» напряжения на инверсном входе усилителя и как следствие предотвращает резкий бросок оборотов двигателя. Теперь рассмотрим принцип работы регулятора оборотов. Регулятор предназначен для поддержания постоянных оборотов двигателя в зоне регули-рования. Регулятор представляет собой дифференциальный усилитель с суммированием двух напряжений: напряжения задания и напряжения обратной связи. Напряжение задания задается резистором RP1 и поступает через фильтр R20, C8, R21, выполняющий одновременно функции узла «разгона — торможения», поступает на инверсный вход регулятора ОУ DA1.3. При увеличении напряжения задания на выходе ОУ DA1.3 линейно уменьшается выходное напряжение. Выходное напряжение регулятора поступает на инверсный вход компаратора СИФУ DA1.2 где, суммируясь с импульсами пилообразного напряжения, преобразуется в серию прямоугольных импульсов идущих на управляющие электроды тиристоров. При увеличении (уменьшении) напряжения задания увеличивается (уменьшается) и выходное напряжение на выходе силового блока. На этом графике представлена зависимость оборотов двигателя от напряжения задания. Значения оборотов двигателя даны для примера. Делитель напряжения R22, R23 включенный на прямой вход регулятора DA1.3 служит для предотвращения аварии двигателя при обрыве обратной связи (при обрыве обратной связи двигатель идет в разнос). При включении привода, тахогенератор начинает вырабатывать напряжение, пропорциональное оборотам двигателя. Это напряжение поступает на вход прецизионного детектора DA1.4, DA2.1 собранного по двухполупериодной схеме. Напряжение, снимаемое с выхода точного детектора DA1.4, DA2.1, поступает через фильтр C10, R30, R33 на масштабирующий усилитель обратной связи DA2.2. Усилитель служит для подгонки напряжения обратной связи поступающего с тахогенератора. Напряжение с выхода ОУ DA2.2. поступает как на вход регулятора DA1.3 так и на схему защиты DA2.3. Резистором RP1 задаются обороты двигателя. При работе двигателя без нагрузки, напряжение на выходе масштабирующего усилителя ниже напряжения на выводе 6 ОУ DA1.3. ≈ +5v, поэтому привод работает как регулятор. При увеличении нагрузки на валу двигателя, уменьшается напряжение, получаемое с тахогенератора и как следствие уменьшение напряжения с выхода, масштабирующего усилителя. Когда это напряжение будет меньше напряжение на выводе 5 ОУ DA1.3 привод входит в зону стабилизации тока. Уменьшение напряжения на неинвертирующем входе ОУ DA1.3 приводит к уменьшению напряжения на его выходе, а так как он работает на инвертирующий усилитель DA1.2, это приводит к большему углу открытия тиристоров и, следовательно, к увеличению напряжения на якоре двигателя.СХЕМА ЗАЩИТЫ Защита от превышения оборотов предназначена для защиты двигателя от аварии, в случае резкого превышения установленных оборотов двигателя. Схема собрана на ОУ DА2.3, включенного по схеме компаратора. На инверсный вход компаратора подается опорное напряжение с делителя R36, R37, RP3. Резистором RP3 устанавливается порог срабатывания защиты. Напряжение с выхода масштабирующего усилителя DA2.2 поступает на прямой вход компаратора защиты DA2.3. При превышении оборотов двигателя выше номинальных, напряжение на прямом входе компаратора превышает порог уставки защиты, определяемой RP3 — компаратор переключиться. Благодаря наличию в схеме положительной обратной связи R38 приводит к «за-щелкиванию» компаратора, а наличие диода VD12 препятствует сбросу компаратора. При срабатывании защиты, напряжение с выхода компаратора защиты (≈ +11v) через диод VD14 поступает на инверсный вход 13 DA1.2 СИФУ, а так как напряжение защиты превышает напряжение «пилы» (= 9v) — происходит мгновенный запрет выдачи управляющих импульсов на управляющие электроды тиристоров. Напряжение с выхода компаратора защиты DA2.3 открывает транзистор VT4, что приводит к срабатыванию реле Р1.1 и зажиганию светодиода VL1 сигнализирующего об аварийной ситуации. Снять защиту можно, только полностью обесточив привод, и, выдержав паузу 5 — 10 секунд вновь включив его. Силовая часть блока управления. Схема силовой части представлена ниже
Значения оборотов двигателя даны для примера. Делитель напряжения R22, R23 включенный на прямой вход регулятора DA1.3 служит для предотвращения аварии двигателя при обрыве обратной связи (при обрыве обратной связи двигатель идет в разнос). При включении привода, тахогенератор начинает вырабатывать напряжение, пропорциональное оборотам двигателя. Это напряжение поступает на вход прецизионного детектора DA1.4, DA2.1 собранного по двухполупериодной схеме. Напряжение, снимаемое с выхода точного детектора DA1.4, DA2.1, поступает через фильтр C10, R30, R33 на масштабирующий усилитель обратной связи DA2.2. Усилитель служит для подгонки напряжения обратной связи поступающего с тахогенератора. Напряжение с выхода ОУ DA2.2. поступает как на вход регулятора DA1.3 так и на схему защиты DA2.3. Резистором RP1 задаются обороты двигателя. При работе двигателя без нагрузки, напряжение на выходе масштабирующего усилителя ниже напряжения на выводе 6 ОУ DA1.3. ≈ +5v, поэтому привод работает как регулятор. При увеличении нагрузки на валу двигателя, уменьшается напряжение, получаемое с тахогенератора и как следствие уменьшение напряжения с выхода, масштабирующего усилителя. Когда это напряжение будет меньше напряжение на выводе 5 ОУ DA1.3 привод входит в зону стабилизации тока. Уменьшение напряжения на неинвертирующем входе ОУ DA1.3 приводит к уменьшению напряжения на его выходе, а так как он работает на инвертирующий усилитель DA1.2, это приводит к большему углу открытия тиристоров и, следовательно, к увеличению напряжения на якоре двигателя.СХЕМА ЗАЩИТЫ Защита от превышения оборотов предназначена для защиты двигателя от аварии, в случае резкого превышения установленных оборотов двигателя. Схема собрана на ОУ DА2.3, включенного по схеме компаратора. На инверсный вход компаратора подается опорное напряжение с делителя R36, R37, RP3. Резистором RP3 устанавливается порог срабатывания защиты. Напряжение с выхода масштабирующего усилителя DA2.2 поступает на прямой вход компаратора защиты DA2.3. При превышении оборотов двигателя выше номинальных, напряжение на прямом входе компаратора превышает порог уставки защиты, определяемой RP3 — компаратор переключиться. Благодаря наличию в схеме положительной обратной связи R38 приводит к «за-щелкиванию» компаратора, а наличие диода VD12 препятствует сбросу компаратора. При срабатывании защиты, напряжение с выхода компаратора защиты (≈ +11v) через диод VD14 поступает на инверсный вход 13 DA1.2 СИФУ, а так как напряжение защиты превышает напряжение «пилы» (= 9v) — происходит мгновенный запрет выдачи управляющих импульсов на управляющие электроды тиристоров. Напряжение с выхода компаратора защиты DA2.3 открывает транзистор VT4, что приводит к срабатыванию реле Р1.1 и зажиганию светодиода VL1 сигнализирующего об аварийной ситуации. Снять защиту можно, только полностью обесточив привод, и, выдержав паузу 5 — 10 секунд вновь включив его. Силовая часть блока управления. Схема силовой части представлена ниже Трансформатор Tr1 предназначен для питания схемы блока управления. Управляемый выпрямитель собран по полумостовой симметричной схеме и содержит два силовых диода D1,D2 и два силовых тиристора Т1, Т2, и защитный диод D3. Обмотка возбуждения питается от своего отдельного трансформатора и выпрямителя. Если на двигателе отсутствует тахогенератор, то обратную связь, для контроля оборотов, можно выполнить следующим образом: 1. Применить трансформатор тока, включенный в цепь питания управляемого выпрямителя
Трансформатор Tr1 предназначен для питания схемы блока управления. Управляемый выпрямитель собран по полумостовой симметричной схеме и содержит два силовых диода D1,D2 и два силовых тиристора Т1, Т2, и защитный диод D3. Обмотка возбуждения питается от своего отдельного трансформатора и выпрямителя. Если на двигателе отсутствует тахогенератор, то обратную связь, для контроля оборотов, можно выполнить следующим образом: 1. Применить трансформатор тока, включенный в цепь питания управляемого выпрямителя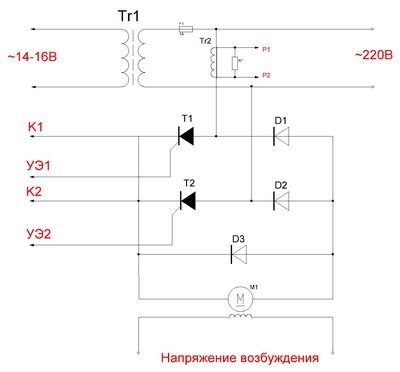 Если используется трансформатор тока, то перемычку P1 на схеме блока управления поставить в положение 1-3, это необходимо потому, что при увеличении нагрузки ток якоря будет увеличиваться, следовательно напряжение, снимаемое с трансформатора тока тоже будет увеличиваться, поэтому напряжение обратной связи необходимо подавать на инвертирующий вывод микросхемы DA1.3. Так же можно поставить стандартный токовый шунт, но только в цепь якоря двигателя, после выпрямителя и снимать сигнал обратной связи с него. 2. Использовать датчик якорного напряжения. Схема приведена ниже.
Если используется трансформатор тока, то перемычку P1 на схеме блока управления поставить в положение 1-3, это необходимо потому, что при увеличении нагрузки ток якоря будет увеличиваться, следовательно напряжение, снимаемое с трансформатора тока тоже будет увеличиваться, поэтому напряжение обратной связи необходимо подавать на инвертирующий вывод микросхемы DA1.3. Так же можно поставить стандартный токовый шунт, но только в цепь якоря двигателя, после выпрямителя и снимать сигнал обратной связи с него. 2. Использовать датчик якорного напряжения. Схема приведена ниже.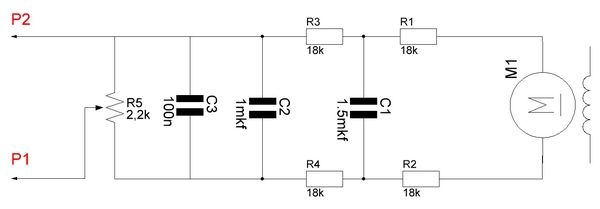 Датчик якорного напряжения представляет собой фильтр – делитель и подключается непосредственно к клеммам якоря электродвигателя. Настройка привода производиться следующим образом. Резисторы “Задание” и “Масштабирование Uoc” выставляется в среднее положение. Резистор R5 датчика якорного напряжения выводиться в нижнее к “земле” положение. Включаем привод и выставляем напряжение на якоре двигателя примерно 110 вольт. Контролируя напряжение на якоре двигателя, начинаем вращать резистор R5. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь.Теперь перейдем к конструкции и наладке блока управления. Блок управления был выполнен на печатной плате (файл печатной платы)
Датчик якорного напряжения представляет собой фильтр – делитель и подключается непосредственно к клеммам якоря электродвигателя. Настройка привода производиться следующим образом. Резисторы “Задание” и “Масштабирование Uoc” выставляется в среднее положение. Резистор R5 датчика якорного напряжения выводиться в нижнее к “земле” положение. Включаем привод и выставляем напряжение на якоре двигателя примерно 110 вольт. Контролируя напряжение на якоре двигателя, начинаем вращать резистор R5. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь.Теперь перейдем к конструкции и наладке блока управления. Блок управления был выполнен на печатной плате (файл печатной платы)
 Плата проводом МГТФ соединена с разъемом, для удобства демонтажа при ремонте.Настройка На время настройки была собрана силовая часть навесным монтажем, в качестве нагрузки была использована обычная лампа накаливания.
Плата проводом МГТФ соединена с разъемом, для удобства демонтажа при ремонте.Настройка На время настройки была собрана силовая часть навесным монтажем, в качестве нагрузки была использована обычная лампа накаливания. Наладку начинаем с проверки напряжений питания и напряжения питания на операционных усилителях DA1, DA2. Микросхемы желательно ставить в панельки. Потом контролируем осциллограммы в контрольных точках КТ1, КТ2, КТ3 (осциллограммы в этих точках приведены в начале описания СИФУ). Теперь, осциллограф ставим в контрольную точку КТ4. Должны быть пилообразные импульсы, как на осиллограмме выше (кнопка «Пуск» в этот момент должна быть разомкнута). Подстроечным резистором RP1 необходимо выставить размах «пилы» равным 9 вольт, это очень важный момент, так как от него зависит дальнейшая работа схемы. Так как разброс параметров полевых транзисторов бывает весьма значительный, возможно диапазона регулировки RP1 может не хватить, тогда подбором номинала резистора R10 добиться нужного размаха. В контрольной точке КТ3 длительность импульса должна быть 1.5 — 1.8ms, если нет, то подбором резистора R4 (в сторону уменьшения) добиться необходимой длительности. Вращая регулятор RR1 в контрольной точке КТ5 проконтролировать изменение скважности импульсов от максимума до полного их исчезновения при нижнем положении движка RR1. При этом должна изменятся яркость лампочки подключенной к силовому блоку. Далее подключаем блок управления к двигателю и тахогенератору. Выставляем регулятором RR1 напряжение на якоре около 40-50 вольт. Резистор RP3 должен быть установлен в среднее положение. Контролируя напряжение на якоре двигателя, начинаем вращать резистор RP3. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь. Для желающих поэкспериментировать: для увеличения жесткости привода можно также увеличить сопротивление R24, увеличив тем самым коэффициент усиления регулятора либо увеличить резистор R32. Если используется обратная связь по току якоря двигателя. Для этого, как говорилось выше, необходим трансформатор тока, включенный в цепь питания управляемого выпрямителя. Схема калибровки трансформатора тока дана ниже. Подбором резистора получить на выходе трансформатора переменное напряжение ≈ 2 ÷ 2.5v. Мощность нагрузки RN1 должна соответствовать мощности двигателя.
Наладку начинаем с проверки напряжений питания и напряжения питания на операционных усилителях DA1, DA2. Микросхемы желательно ставить в панельки. Потом контролируем осциллограммы в контрольных точках КТ1, КТ2, КТ3 (осциллограммы в этих точках приведены в начале описания СИФУ). Теперь, осциллограф ставим в контрольную точку КТ4. Должны быть пилообразные импульсы, как на осиллограмме выше (кнопка «Пуск» в этот момент должна быть разомкнута). Подстроечным резистором RP1 необходимо выставить размах «пилы» равным 9 вольт, это очень важный момент, так как от него зависит дальнейшая работа схемы. Так как разброс параметров полевых транзисторов бывает весьма значительный, возможно диапазона регулировки RP1 может не хватить, тогда подбором номинала резистора R10 добиться нужного размаха. В контрольной точке КТ3 длительность импульса должна быть 1.5 — 1.8ms, если нет, то подбором резистора R4 (в сторону уменьшения) добиться необходимой длительности. Вращая регулятор RR1 в контрольной точке КТ5 проконтролировать изменение скважности импульсов от максимума до полного их исчезновения при нижнем положении движка RR1. При этом должна изменятся яркость лампочки подключенной к силовому блоку. Далее подключаем блок управления к двигателю и тахогенератору. Выставляем регулятором RR1 напряжение на якоре около 40-50 вольт. Резистор RP3 должен быть установлен в среднее положение. Контролируя напряжение на якоре двигателя, начинаем вращать резистор RP3. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь. Для желающих поэкспериментировать: для увеличения жесткости привода можно также увеличить сопротивление R24, увеличив тем самым коэффициент усиления регулятора либо увеличить резистор R32. Если используется обратная связь по току якоря двигателя. Для этого, как говорилось выше, необходим трансформатор тока, включенный в цепь питания управляемого выпрямителя. Схема калибровки трансформатора тока дана ниже. Подбором резистора получить на выходе трансформатора переменное напряжение ≈ 2 ÷ 2.5v. Мощность нагрузки RN1 должна соответствовать мощности двигателя.  Внимание! Трансформатор тока без нагрузочного резистора не включать. Подключаем трансформатор тока к цепи обратной связи P1 и P2. На время настройки «Регулятора» желательно выпаять диод D12, чтобы исключить ложное срабатывание защиты. Осциллограммы в контрольных точках КТ8, КТ9, КТ10 должны быть как на рисунке ниже.
Внимание! Трансформатор тока без нагрузочного резистора не включать. Подключаем трансформатор тока к цепи обратной связи P1 и P2. На время настройки «Регулятора» желательно выпаять диод D12, чтобы исключить ложное срабатывание защиты. Осциллограммы в контрольных точках КТ8, КТ9, КТ10 должны быть как на рисунке ниже.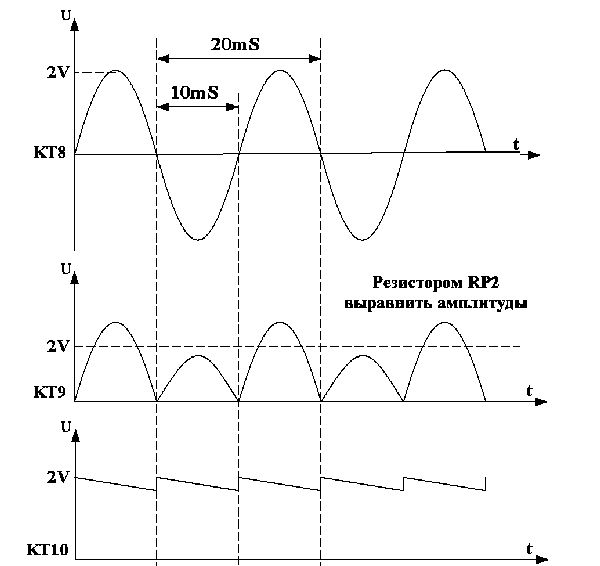 Дальнейшая настройка такая же как и в случае с использования тахогенератора.Если используется обратная связь по напряжению якоря двигателя. Как отмечалось выше, можно применить обратную связь по якорному напряжению, для этого собирается датчик якорного напряжения. Настройка блока управления производиться следующим образом. Резисторы “Задание” и “Масштабирование Uoc” выставляется в среднее положение. Резистор R5 датчика якорного напряжения выводиться в нижнее к “земле” положение. Включаем привод и выставляем напряжение на якоре двигателя примерно 110 вольт. Контролируя напряжение на якоре двигателя, начинаем вращать резистор R5. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь. Данный блок управления изготавливался для расточного станка. Вот фото этого монстра
Дальнейшая настройка такая же как и в случае с использования тахогенератора.Если используется обратная связь по напряжению якоря двигателя. Как отмечалось выше, можно применить обратную связь по якорному напряжению, для этого собирается датчик якорного напряжения. Настройка блока управления производиться следующим образом. Резисторы “Задание” и “Масштабирование Uoc” выставляется в среднее положение. Резистор R5 датчика якорного напряжения выводиться в нижнее к “земле” положение. Включаем привод и выставляем напряжение на якоре двигателя примерно 110 вольт. Контролируя напряжение на якоре двигателя, начинаем вращать резистор R5. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь. Данный блок управления изготавливался для расточного станка. Вот фото этого монстра
 На этом станке вышел из строя электромашинный усилитель, который и управлял двигателем постоянного тока перемещения стола. Вот такой электромашинный усилитель.
На этом станке вышел из строя электромашинный усилитель, который и управлял двигателем постоянного тока перемещения стола. Вот такой электромашинный усилитель. Заместо него и делался данный блок управления. Вот фото самого двигателя постоянного тока.
Заместо него и делался данный блок управления. Вот фото самого двигателя постоянного тока. Блок управления был собран на изоляциоонном основани, где размещены все основные элементы.
Блок управления был собран на изоляциоонном основани, где размещены все основные элементы. Силовые диоды и тиристоры установлены на теплоотводы. Так же была сделана панель с разъемами, куда были выведены сигналы с контрольных точек схемы. Это делалось для удобство настройки и ремонта непосредственно на станке. Вот смонтированный блок управления в силовом шкафу станка
Силовые диоды и тиристоры установлены на теплоотводы. Так же была сделана панель с разъемами, куда были выведены сигналы с контрольных точек схемы. Это делалось для удобство настройки и ремонта непосредственно на станке. Вот смонтированный блок управления в силовом шкафу станка

 На другой стороне силового шкафа был установлен маленький пульт управления.
На другой стороне силового шкафа был установлен маленький пульт управления. На нем расположены: -тумблер включения блока -тумблер режима работы. Так как для установочных перемещений стола станка, точный контроль и стабилизация оборотов не нужны, то на это время цепь обратной связи шунтируется. -ручки регулировки количества оборотов. Было поставлено два переменных резистора, один для грубой регулировки, второй — многооборотный — для точной установки нужных оборотов при черновой и чистовой расточке детали. Кому интересно, ниже представлено видео работы станка. Сперва, показывается расточка отверстия в стальной плите толщиной 20мм. Потом показывается с какой частотой вращается винт подачи стола станка. С этой скорость подается деталь на резец, а такую частоту вращения подающего винта обеспечивает двигатель постоянного тока, для которого, собственно, все это и делалось. Блок управления показал себя хорошо, сбоев и аварий не было.Схемы и перечень элементов
На нем расположены: -тумблер включения блока -тумблер режима работы. Так как для установочных перемещений стола станка, точный контроль и стабилизация оборотов не нужны, то на это время цепь обратной связи шунтируется. -ручки регулировки количества оборотов. Было поставлено два переменных резистора, один для грубой регулировки, второй — многооборотный — для точной установки нужных оборотов при черновой и чистовой расточке детали. Кому интересно, ниже представлено видео работы станка. Сперва, показывается расточка отверстия в стальной плите толщиной 20мм. Потом показывается с какой частотой вращается винт подачи стола станка. С этой скорость подается деталь на резец, а такую частоту вращения подающего винта обеспечивает двигатель постоянного тока, для которого, собственно, все это и делалось. Блок управления показал себя хорошо, сбоев и аварий не было.Схемы и перечень элементов electronics-lab.ru

Схема подключения системы управления двигателем ВАЗ зависит от применяемого блока управления и комплектации датчиков и приборов управления. На большинстве моделей ВАЗ устанавливается система электронного управления двигателем МР7.0.
Существует несколько комплектаций, в зависимости от норм токсичности отработанных газов. Последнее время выпускаются системы с распределительным впрыском топлива с нормами токсичности ЕВРО-2 и ЕВРО-3.
Схема подключения системы управления двигателем ВАЗ системы ЕВРО имеет отличая от ранних систем управления двигателем, которые заключается в наличие в системе катализатора и адсорбера. Кроме того в системе под нормы токсичности ЕВРО-3 добавлен дополнительный датчик кислорода, и датчик неровности дороги. На последних моделях кроме того применяется система зажигания с низковольтным распределением, то есть на каждую свечу установлена отдельная катушка зажигания.
Схема подключения системы управления двигателем ВАЗ достаточно сложная и для поиска неисправностей в ней необходимо знать назначение выводов ЭБУ.
| № вывода | Цепь |
| 1 | Зажигание 1 и 4 цилиндра. |
| 3 | Выход управления реле электробензонасоса. |
| 4 | Выход управления регулятором холостого хода (клемма А). |
| 5 | Выход управления продувкой адсорбера. |
| 7 | Входной сигнал датчика массового расхода воздуха |
| 8 | Входной сигнал датчика фазы |
| 9 | Вход сигналя с датчика скорости. |
| 10 | Масса датчика кислорода установленного перед нейтрализатором. |
| 11 | Вход сигнала датчика детонаций (клемма 1) |
| 12 | Питание датчиков (+5 В) |
| 13 | L-line. Вход сигнала диагностики. Контакт соединен с контактом «В» колодки диагностики (контакт 2 в колодке под ЕВРО-3). |
| 14 | Масса форсунок. Силовая «земля». |
| 15 | Лампа «CHECK ENGINE» |
| 16 | Форсунка 3. |
| 17 | Форсунка 1. |
| 18 | Вход напряжения аккумуляторной батареи. |
| 19 | Общий провод (логическое заземление), |
| 21 | Зажигание 2 и 3 цилиндра. |
| 22 | Выход управления регулятором xлостого хода (клемма В) |
| 23 | Реле кондиционера. |
| 24 | Силовое заземление. |
| 26 | Mасса датчиков ДПДЗ, ДТОЖ, ДМРВ. |
| 27 | Вход сигнала напряжения с выключателя зажигания(клемма 15). |
| 28 | Входной сигнал датчика кислорода. |
| 29 | Сигнал с датчикакислорода установленного посленейтрализатора. |
| 30 | Вход cигналадатчика детонации (клемма 2). |
| 31 | Входной сигнал датчика неровной дороги. |
| 32 | Сигнал расхода топлива |
| 34 | Форсунка 4 |
| 35 | Форсунка 2. |
| 36 | Главное реле. |
| 37 | +12В после главного реле. |
| 39 | Выход управления регулятором холостого хода (клемма С). |
| 41 | Нагреватель датчика кислорода установленного после нейтрализатора. |
| 43 | Сигнал на тахометр. |
| 45 | Датчик температуры охлаждающей жидкости. |
| 46 | Реле вентилятора охлаждения. |
| 47 | Вход сигнала запроса включения кондиционера. |
| 48 | Датчик положения коленвала (клемма В). |
| 49 | Датчик положения коленвала (клемма А). |
| 50 | Разрешение программирования. |
| 51 | Нагреватель датчика кислорода установленного перед нейтрализатором. |
| 53 | Датчик положения дроссельной заслонки. |
| 54 | Выход управления регулятором холостого хода (клемма D). |
| 55 | K-line. Вход сигнала автомобильной противоугонной системы (клемма 18). |
Примечание: Данные представлены для системы ЕВРО-3 с контроллером МР7.0.
Некоторые элементы могут отсутствовать в системе Евро-2.
Сигнал с выключателя, вывод 15, зажигания не является питанием контроллера, он лишь информирует контроллер о том, что зажигание включено Когда выключатель находится в положении «зажигание» или «стартер», напряжение на контакте 27 разъёма ЭБУ равно напряжению бортсети автомобиля. Питание контроллера происходит постоянно от аккумулятора автомобиля на вывод 18, в том числе и при выключенном зажигании. Напряжение поступает через предохранитель.
Включение зажигания является для контроллера сигналом на замыкание реле электробензонасоса и главного реле. Включение и выключение обоих реле происходит подачей на катушку реле минуса через вывод 3 и 36 ЭБУ. При отсутствии сигналов датчика положения коленчатого вала в течение 2 секунды, на выводе 49 отсутствует переменное напряжение около 3В, контроллер выключает реле бензонасоса. При поступлении сигнала с датчика положения коленчатого вала контроллер вновь включает реле электробензонасоса.
Через вывод 5 контроллера происходит замыкание цепи на «массу» для включения клапана продувки адсорбера. При заглушенном двигателе и включенном зажигании, напряжение на контакте должно быть равным напряжению аккумулятора. При работающем двигателе напряжение изменяется в диапазоне от 0 В до напряжения бортсети автомобиля. Уровень напряжения зависит от скважности управляющего сигнала, посылаемого на электромагнитный клапан адсорбера.
Датчик коленвала подаёт сигнал на вывод 49 ЭБУ. Сигналом является вырабатываемое им переменное напряжение частота которого соответствует частоте прохождения зубьев задаточного диска под датчиком.
Для проверки датчика коленвала необходимо проверить напряжение на выводе 49 ЭБУ. При вращении коленчатого вала двигателя на контакте присутствует сигнал напряжения переменного тока, близкий по форме к синусоиде, с частотой и амплитудой, пропорциональными оборотам. При включенном зажигании и отсутствии вращения коленчатого вала в случае исправной цепи датчика напряжение на контакте равно нулю, а в случае обрыва в цепи близко к 5 В.
На 55 контакт блок управления АПС посылает код-пароль, который сравнивается с информацией, хранящейся в памяти контроллера. По результату анализа кода контроллер принимает решение о возможности запуска и работы двигателя. Во время связи контроллера с АПС, К-line отключена от колодки диагностики. После окончания связи, бпок управления АПС замыкает свои контакты «18» и «9», подключая диагностическую линию к контакту «М» колодки диагностики (контакт 10 в колодке под ЕВРО-3), После этого контроллер, по этой линии, может обмениваться информацией с диагностическим прибором. Данные передаются в виде серий импульсов изменяющих амплитуду с высокого уровня (напряжения бортовой сети) до низкого уровня. Если АПС на автомобиле не активен, то для связи диагностического оборудования с ЭБУ через диагностическую колодку, необходимо замкнуть выводы «18» и «9» на колодке АПС.

«Если Вы заметили ошибку в тексте, пожалуйста выделите это место мышкой и нажмите CТRL+ENTER»
admin 12/04/2012"Если статья была Вам полезна, поделитесь ссылкой на неё в соцсетях"avtolektron.ru
Схема управления двигателем постоянного тока с контроллером КП-2026, приведена на рис. 3. Контроллер имеет дугогасящую катушку LM3. При установке барабана контроллера в первое рабочее положение включается контактор и отключается после перевода барабана в нулевое положение. Контактор отключается также при размыкании одного из конечных выключателей Q1 и Q2. Цепь питания катушки контактора: один конец ее включен в главную цепь (+Л1), а второй конец присоединен к пальцу 4 контроллера и через сегменты контроллера (в зависимости от направления) и один из конечных выключателей соединен со вторым проводом главной цепи (-Л2).
 Рис. 3. Схема управления с контроллером КП-2026 и контакторомДвигатель, получив питание через все сопротивление резистора R, начнет вращаться на малых оборотах. При повороте барабана во второе, третье и четвертое положения уменьшается сопротивление в цепи двигателя и частота вращения его растет; в пятом положении сопротивление полностью выводится, двигатель оказывается включенным на полное напряжение сети и имеет наибольшую частоту вращения. При движении «Назад» схема будет работать аналогичным образом.Одновременно с включением электродвигателя включается и параллельный тормозной электромагнит YB. Схема управления двигателями постоянного тока с электрическим торможением рассмотрена ниже.Управление двигателем постоянного тока с помощью барабанного контроллера типа КПТ осуществляется по схеме, представленной на рис. 4. Контроллер имеет пять рабочих положений и три тормозных. Кроме главного барабана контроллер снабжен дополнительным переключающим барабаном, который переключается только тогда в другое положение, когда барабан проходит все положения торможения, возвращаясь из положений «Ход».
Рис. 3. Схема управления с контроллером КП-2026 и контакторомДвигатель, получив питание через все сопротивление резистора R, начнет вращаться на малых оборотах. При повороте барабана во второе, третье и четвертое положения уменьшается сопротивление в цепи двигателя и частота вращения его растет; в пятом положении сопротивление полностью выводится, двигатель оказывается включенным на полное напряжение сети и имеет наибольшую частоту вращения. При движении «Назад» схема будет работать аналогичным образом.Одновременно с включением электродвигателя включается и параллельный тормозной электромагнит YB. Схема управления двигателями постоянного тока с электрическим торможением рассмотрена ниже.Управление двигателем постоянного тока с помощью барабанного контроллера типа КПТ осуществляется по схеме, представленной на рис. 4. Контроллер имеет пять рабочих положений и три тормозных. Кроме главного барабана контроллер снабжен дополнительным переключающим барабаном, который переключается только тогда в другое положение, когда барабан проходит все положения торможения, возвращаясь из положений «Ход». Рис. 4. Схема управления с контроллером типа КПТВ тормозных положениях двигатель отключается от сети, переходит на генераторный режим и его якорь замыкается на сопротивление, что вызывает торможение. На схеме обозначено: L1 — обмотка возбуждения; R — реостат регулировочный; R1 — резистор тормозной; YB — тормозной электромагнит; М — двигатель.На рис. 5 показаны отдельные положения контроллера типа КПТ, соответствующие работе двигателя в обычном режиме и режиме торможения.
Рис. 4. Схема управления с контроллером типа КПТВ тормозных положениях двигатель отключается от сети, переходит на генераторный режим и его якорь замыкается на сопротивление, что вызывает торможение. На схеме обозначено: L1 — обмотка возбуждения; R — реостат регулировочный; R1 — резистор тормозной; YB — тормозной электромагнит; М — двигатель.На рис. 5 показаны отдельные положения контроллера типа КПТ, соответствующие работе двигателя в обычном режиме и режиме торможения. Рис.5. Развертка схемы с контроллером типа КПТСледующие четыре рабочих положения отличаются от первого тем, что сопротивление в цепи двигателя постепенно уменьшается. На обеих сторонах контроллера имеются нулевые положения, в которых двигатель отключается от сети.Тормозной магнит включается и растормаживает механизм только в положениях «Ход», а в тормозных положениях контроллера он не получает питания и тормозит механизм. В первом тормозном положении контроллера двигатель работает в генераторном режиме на нагрузку, состоящую из сопротивления RT и соединенного последовательно с ним добавочного тормозного сопротивления RF.По мере снижения скорости контроллер переводят во второе и третье тормозные положения, уменьшая сопротивление (ступени 2-3 и 3-4 закорачиваются). В тормозных положениях, так как двигатель работает в режиме генератора, направление тока в его обмотке возбуждения меняется на обратное, что показано стрелкой.Контроллеры постоянного тока типа НП кулачковые применяют для управления электродвигателями последовательного, смешанного и параллельного возбуждения. Схема управления двигателями последовательного возбуждения наиболее распространена в крановых установках.У контроллеров с одинаковой схемой замыкания для обоих направлений вращения в первом положении барабана обмотки двигателя подключаются к сети через полное пусковое сопротивление, параллельно якорю включено сопротивление для получения малой частоты вращения электродвигателя. В следующих положениях контроллера отключается параллельно включенное сопротивление и последовательно замыкаются накоротко соответствующие ступени пускового сопротивления.Реверсирование электродвигателей последовательного возбуждения производится переключением обмотки якоря.Контроллеры с неодинаковой схемой замыкания применяют исключительно для электродвигателей последовательного возбуждения механизмов подъема.В первом положении подъема обмотки электродвигателя включаются в сеть через пусковое сопротивление. При последующих положениях последовательно замыкаются накоротко соответствующие ступени сопротивления.В положениях спуска обмотки электродвигателя включаются по потенциометрической схеме. Реверсируется всегда обмотка якоря. Скорость спуска при переходе с одного положения в последующее увеличивают, выводя ступени сопротивления включенного в цепь якоря и вводя сопротивление в параллельную ей цепь обмотки возбуждения.При спуске легких грузов, не преодолевающих сопротивления механизмов, электродвигатель развивает момент, направленный в сторону спуска (двигательный режим). Работая в генераторном режиме при спуске тяжелых грузов, электродвигатель, начиная с определенной частоты вращения, тормозит груз, опускающийся под действием собственного веса. Контакты цепи управления в контроллере предназначены для осуществления схем нулевой блокировки и конечной защиты.Для обеспечения конечной защиты и включения электромеханических тормозов в дополнение к контроллеру требуется электромагнитный контактор. Конечные выключатели воздействуют на тяговую катушку этого контактора. Электромеханические тормоза включаются блокировочными контактами контактора.
Рис.5. Развертка схемы с контроллером типа КПТСледующие четыре рабочих положения отличаются от первого тем, что сопротивление в цепи двигателя постепенно уменьшается. На обеих сторонах контроллера имеются нулевые положения, в которых двигатель отключается от сети.Тормозной магнит включается и растормаживает механизм только в положениях «Ход», а в тормозных положениях контроллера он не получает питания и тормозит механизм. В первом тормозном положении контроллера двигатель работает в генераторном режиме на нагрузку, состоящую из сопротивления RT и соединенного последовательно с ним добавочного тормозного сопротивления RF.По мере снижения скорости контроллер переводят во второе и третье тормозные положения, уменьшая сопротивление (ступени 2-3 и 3-4 закорачиваются). В тормозных положениях, так как двигатель работает в режиме генератора, направление тока в его обмотке возбуждения меняется на обратное, что показано стрелкой.Контроллеры постоянного тока типа НП кулачковые применяют для управления электродвигателями последовательного, смешанного и параллельного возбуждения. Схема управления двигателями последовательного возбуждения наиболее распространена в крановых установках.У контроллеров с одинаковой схемой замыкания для обоих направлений вращения в первом положении барабана обмотки двигателя подключаются к сети через полное пусковое сопротивление, параллельно якорю включено сопротивление для получения малой частоты вращения электродвигателя. В следующих положениях контроллера отключается параллельно включенное сопротивление и последовательно замыкаются накоротко соответствующие ступени пускового сопротивления.Реверсирование электродвигателей последовательного возбуждения производится переключением обмотки якоря.Контроллеры с неодинаковой схемой замыкания применяют исключительно для электродвигателей последовательного возбуждения механизмов подъема.В первом положении подъема обмотки электродвигателя включаются в сеть через пусковое сопротивление. При последующих положениях последовательно замыкаются накоротко соответствующие ступени сопротивления.В положениях спуска обмотки электродвигателя включаются по потенциометрической схеме. Реверсируется всегда обмотка якоря. Скорость спуска при переходе с одного положения в последующее увеличивают, выводя ступени сопротивления включенного в цепь якоря и вводя сопротивление в параллельную ей цепь обмотки возбуждения.При спуске легких грузов, не преодолевающих сопротивления механизмов, электродвигатель развивает момент, направленный в сторону спуска (двигательный режим). Работая в генераторном режиме при спуске тяжелых грузов, электродвигатель, начиная с определенной частоты вращения, тормозит груз, опускающийся под действием собственного веса. Контакты цепи управления в контроллере предназначены для осуществления схем нулевой блокировки и конечной защиты.Для обеспечения конечной защиты и включения электромеханических тормозов в дополнение к контроллеру требуется электромагнитный контактор. Конечные выключатели воздействуют на тяговую катушку этого контактора. Электромеханические тормоза включаются блокировочными контактами контактора.
morez.ru

Категория:
Электрооборудование строительных машин
Типовые схемы управления приводами с двигателями постоянного токаСхема управления двигателем постоянного тока с параллельным, возбуждением (рис. 74). Якорь двигателя включается контактами контакторов 1В и 2В или 1Н и 2Н. Последовательно с якорем включаются пусковые сопротивления, являющиеся в данной схеме одновременно регулировочными. Каждая пусковая ступень может быть зашун тирован а соответствующим контактом контакторов ускорения 1У, 2У и ЗУ. Включение якорной цепи осуществляется контактом линейного контактора Л. Параллельно якорю двигателя посредством з. к. контактора Т подключается сопротивление динамического торможения. Кроме того, параллельно якорю присоединяется катушка реле динамического торможения РДТ. Обмотка возбуждения двигателя ОВ при отключении от сети замыкается на разрядное сопротивле-
Пуск двигателя «Вперед» осуществляется путем включения контактов командоконтроллера К1, К2, К4, К5 и Кб. При этом включаются линейный контактор Л, контакторы 1В, 2В и двигатель подключается в сеть
через пусковое сопротивление. После срабатывания контактора Л катушка реле ускорения 1РУ теряет питание. Одновременно через замыкающий бло-7 кировочный контакт 1В подается питание на К4, К5 и Кб. Контактор ускорения 1У срабатывает через интервал, определяемый выдержкой времени реле 1РУ. После срабатывания контактора 1У накоротко замыкается, катушка реле ускорения 2РУ, которая находилась под напряжением, равным падению напряжения на первой ступени пускового со-контактах К5 и Кб времени замыкаются лучает питание. Контактор Т, сработав, замыкает якорь двигателя на сопротивление и двигатель переходит в режим динамического торможения, которое заканчивается при 10—20% номинальной скорости двигателя.

Рис. 74. Схема управления двигателем постоянного тока парал-лельного возбуждения
При замкнутых последовательно с выдержкой контакты 2РУ и ЗРУ, которые соответственно включают катушки контакторов ускорения 2У и ЗУ; эти контакторы шунтируют своими контактами ступени ускорения. Двигатель будет работать на естественной характеристике. Включение двигателя для работы «Назад» производится поворотом рукоятки командоконтроллера в направлении, противоположном направлению при пуске вперед. Процесс пуска при этом протекает аналогично.
Во время работы двигателя реле РДТ находится под напряжением, замыкающий контакт РДТ в цепи катушки контактора Т закрыт, но в это время один из размыкающих контактов 2Н или 2В открыт. При отключении двигателя от сети контакты 2В или 2Н закрываются и, так как закрыт контакт РДТ, катушка контактора Т по-
Защита двигателя осуществляется максимальным реле РМ и реле напряжения РН.
Схема управления двигателем постоянного тока, работающим в системе генератор — двигатель (рис. 75). Рассматриваемая схема обеспечивает работу двигателя для одного направления вращения и позволяет производить торможение в режиме генераторного торможения с отдачей энергии в сеть при остановке привода.
Пуск двигателя начинается с подключения цепи управления к источнику постоянного тока. Вследствие подачи питания к цепи управления реле РОП срабатывает и закрывает свои замыкающие контакты в цепи кнопки «Пуск». Далее включается приводной двигатель АД генератора Г. Для включения рабочего двигателя Д нажимают на кнопку «Пуск». При нажатии на эту кнопку замыкается цепь, в которой находятся реле 1РП, реле РМ, контакт реле РОП и кнопка «Стоп»
Обмотка контактора 2Л включается автоматически (поскольку обмотка реле 1РП замкнет свой контакт в цепи катушки 2Л), в результае чего включается и контакты контактора 2Л. Одновременно под напряжением окажется обмотка реле РУП.
Контактор 2Л подключает обмотку возбуждения генератора ОВГ к источнику постоянного тока. В обмотке ОВГ возникает ток, а на зажимах генератора э. д. с. В Цепи якорей двигателя и генератора будет проходить ток. Двигатель разгоняется до скорости, обусловленной положением движка реостата РВГ, регулирующего величину тока возбуждения генератора.
Реле РУП имеет две обмотки: одну — последовательную, включенную в цепь якоря двигателя, и другую — параллельную, подключенную к источнику постоянного тока. Намагничивающие силы, создаваемые этими обмотками, направлены встречно. Пока ток в цепи якоря не превосходит допустимого значения, якорь реле удерживается за счет действия параллельной обмотки; при этом замыкающие контакты реле замкнуты и в цепи ОВГ включена только часть сопротивления РВГ, заключенная между точками а и б. Если ток якоря превосходит допустимое значение, то н. с. (намагничивающая сила) последовательной обмотки нейтрализует н. с. параллельной обмотки и якорь реле отпадает. Замыкающие контакты реле РУП ра‘змыкаются, в цепь обмотки возбуждения вводится все сопротивление реостата РВГ. В результате этого уменьшается темп нарастания э. д, с. генератора, дальнейшее увеличение тока якоря предотвращается.
Рис. 75. Схема управления двигателем постоянного тока в системе Г—Д
Для остановки двигателя нажимают на кнопку «Стоп». При этом параллельная катушка реле РУП теряет питание. Контакты реле размыкаются, и в обмотку возбуждения генератора вводится все сопротивление РВГ. Поскольку обмотка возбуждения остается включенной (питание катушки контактора 2JJ осуществляется в этом случае через контакты реле 2РП), ток в ней начинает убывать. Электродвижущая сила генератора уменьшается и, когда она окажется меньше э. д. с. двигателя, возникнет режим генераторного торможения с отдачей энергии в сеть. Двигатель начнет останавливаться. При снижении напряжения генератора до определенного значения отпадает якорь реле 2РП. Его замыкающие контакты отключают обмотку контактора 2Л, что приводит к тому, что замыкающие контакты 2Л отключат ОВГ от сети постоянного тока, а размыкающие Замыкаются и подсоединяют эту обмотку к якорю генератора. Вследствие изменения полярности напряжения на обмотке ОВГ ток возбуждения и э. д. с. генератора уменьшаются до нуля и двигатель останавливается.
Ограничение тока якоря в допустимых пределах при торможении осуществляет реле РУП. При опасных значениях тока это реле срабатывает и своими замыкающими контактами в цепи обмотки возбуждения генератора замыкает накоротко часть сопротивления РВГ.
Разрядное сопротивление Rp предохраняет обмотку возбуждения от перенапряжений в момент ее отключения. Реле максимального тока РМ отключает двигатель при возникновении в цепи яморя токов короткого замыкания.
Читать далее: Блокировочные связи в схемах управления электроприводами
Категория: - Электрооборудование строительных машин
stroy-technics.ru
 В зависимости от выполняемых функций существуют различные схемы контакторного управления двигателями.
В зависимости от выполняемых функций существуют различные схемы контакторного управления двигателями. На рис.1, а изображена совмещенная схема нереверсивного магнитного пускателя. В ней размещение элементов совпадает с размещением в натуре, т. е. все элементы, находящиеся в корпусе пускателя, сгруппированы в левой части схемы, а кнопочная станция с кнопками «Пуск» и «Стоп» показана в правой части схемы.
Кнопочная станция обычно размещается на некотором расстоянии от магнитного пускателя. Для уяснения принципа действия схемы управления двигателем обычно используют развернутые (принципиальные) схемы (рис.1.б). Нажимая на пусковую кнопку SB2, замыкают цепь катушки контактора КМ, которая включает три контакта КМ силовой цепи двигателя. При этом замыкается и блок-контакт КМ, включенный параллельно пусковой кнопке SB2. Это позволяет питать катушку КМ при отпущенной кнопке SB2.
Останов двигателя выполняется нажатием кнопки SB1, при этом катушка обесточивается и отпускает силовые (главные) контакты и блок-контакт. При отпускании кнопки SB1 цепь катушки КМ будет обесточена. Для повторного пуска двигателя необходимо опять нажать кнопку SB2.
Эта схема обеспечивает и так называемую нулевую защиту, т. е. если напряжение сети исчезнет или понизится до 50—60 % номинального, то катушка КМ не удержит замкнутыми силовые контакты КМ и двигатель окажется отключенным. При появлении напряжения или повышении его до величины, близкой к номинальной, не произойдет самопроизвольного включения магнитного пускателя. Для его включения необходимо опять нажать кнопку пуска.
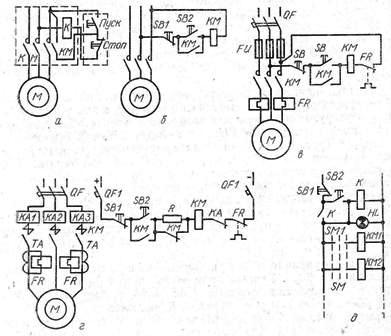
Рис. 1. Схемы управления и защиты двигателей: а — совмещенная и б — развернутая схемы нереверсивного магнитного пускателя; в — защита двигателя предохранителями и тепловыми реле; г — схема станции управления мощным двигателем; д — нулевая защита промежуточным реле
Защита двигателя от перегрева обмотки при длительных перегрузках выполняется тепловыми реле FR, а защита от больших перегрузок или коротких замыканий осуществляется плавкими предохранителями FU или автоматическими выключателями QF (рис. 1, в). Для защиты от длительных перегрузок используются два тепловых реле, так как при одном реле в случае перегорания предохранителя, последовательно с которым включен нагревательный элемент этого реле, двигатель окажется включенным в однофазную сеть и не будет защищен. Размыкающие контакты этих реле включаются последовательно с катушкой пускателя. При размыкании одного из них происходит отключение катушки КМ и останов двигателя, как при нажатии кнопки SB1.
Станция управления двигателями большой мощности приведена на рис. 1, г. Защита от коротких замыканий обеспечивается реле максимального тока КА1—КА3, защиту от перегрузок обеспечивают тепловые реле FR, включенные через трансформаторы тока. Катушка трехполюсного контактора питается постоянным током. Для уменьшения тока в катушке контактора после того, как он включится в цепь, вводится добавочное сопротивление R, которое перед этим было закорочено размыкающим контактом КМ.
В схемах ручного управления с несколькими контроллерами, пакетными выключателями или другими аппаратами для обеспечения нулевой защиты используют промежуточные реле (рис. 1,д). Для подачи напряжения в цепь управления необходимо нажать кнопку SB2, включив тем самым промежуточное реле К, которое включает свой замыкающий контакт К и сигнальную лампу HL, указывающую на наличие напряжения в цепи управления. После отпускания кнопки SB2 катушка реле будет заблокирована, при этом под напряжением окажутся цепи контроллера SM1, пакетного переключателя SM и т. д. и катушки контакторов КМ1, КМ2 и т. д.
В рассмотренных схемах контакты самоблокировки необходимы при длительной работе двигателей. Часто в практике двигатель должен работать только в тот период, пока нажата пусковая кнопка, например в грузоподъемных механизмах. В этом случае в схеме управления отсутствует кнопка «Стоп» (рис.2,а). Иногда необходимо обеспечить работу привода в двух режимах, т. е. включить его кратковременно при наладке станка или на длительный период. Тогда при кратковременном нажатии на кнопку SB2 (рис.2. б) включится катушка контактора КМ и замкнет контакт самоблокировки КМ, двигатель при этом будет работать при отпущенной кнопке SB2.
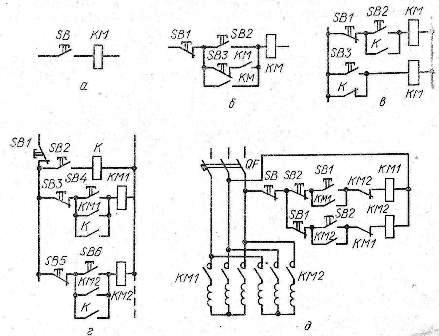
Рис. 2. Разновидности схем управления асинхронными двигателями: а —в толчковом режиме; б и в — при длительной работе и толчковом режиме; г — одновременное включение нескольких двигателей; д — бесступенчатый пуск двухскоростного двигателя
Для наладочного режима работы двигателя нажимают на кнопку SB3, ее замыкающий контакт включает катушку контактора КМ, а размыкающий контакт разрывает цепь самоблокировки контактора. Данная схема имеет тот недостаток, что размыкающий контакт кнопки SB3 может замкнуться раньше, чем разомкнётся блок-контакт КМ и двигатель не отключится. Этого недостатка лишена схема, показанная на рис.2, е.
Для длительной работы нажатием кнопки SB2 включают промежуточное реле К. Один из контактов К включает катушку контактора КМ, а другой одновременно блокирует кнопку SB2, обесточивая тем самым работу двигателя с отпущенной пусковой кнопкой. Для наладочных работ нажимают на кнопку SB3 и удерживают ее необходимое время.
На рис.2, г показана схема пуска одновременно нескольких двигателей от одной пусковой кнопки с использованием промежуточного реле. Кнопкой SB2 включают реле К, замыкающие контакты которого включают одновременно катушки контакторов КМ1, КМ2 и т. д. Останов одновременно всех двигателей выполняют кнопкой SB1. Для включения и отключения каждого двигателя в отдельности используют соответственно кнопки SB3, SB4 и SB5, SB6 и т. д.
Схема бесступенчатого пуска двухскоростного двухобмоточного двигателя с короткозамкнутым ротором изображена на рис. 2, д. Для пуска двигателя на первой частоте вращения служит кнопка SB1, на второй — SB2. Для предотвращения одновременного включения двигателя на две частоты вращения обе кнопки сблокированы механически.
Сблокированы пусковые цепи и электрически. Так, при срабатывании, например, катушки КМ1 размыкающий контакт разрывает цепь катушки КМ2, исключая возможность ее включения. Для перехода на вторую частоту вращения необходимо нажать кнопку SB2, при этом разрывается цепь катушки КМ1, и она отключается. Цепь катушки КМ2 получает электропитание и включает двигатель на вторую частоту вращения.
Реверсивное управление асинхронными двигателями выполняют при помощи двух контакторов (рис.3,а).
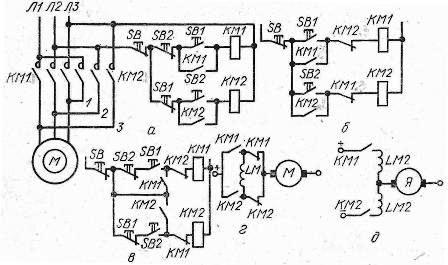
Рис.3. Схемы управления двигателями: а — реверсивным магнитным пускателем с механнческой блокировкой; б — то же с электрической блокировкой; в — сочетание вариантов а и б; г и д — пуска и реверсирования маломощных двигателей постоянного тока
Контактор КМ1 используют для включения двигателя вперед, а КМ2 — назад. Для предотвращения случайного одновременного включения обоих контакторов, что приводит к короткому замыканию, в схеме применяют (см. рис.3, а) взаимную механическую блокировку с двумя размыкающими контактами кнопок SB1 и SB2. Нажимая на кнопку SB1, включают цепь катушки КМ1 и отключают цепь катушки КМ2.
При одновременном нажатии кнопок SB1 и SB2 цепи катушек КМ1 и КМ2 разрываются и ни один из контакторов не включится. Взаимная блокировка осуществляется двумя размыкающими контактами КМ2 и КМ1, включенными в цепи соответственно катушек КМ1 и КМ2 (рис.3, б). Для реверсирования двигателя в этой схеме необходимо предварительно нажать кнопку SB.
Схема на рис.3, в представляет собой сочетание двух предыдущих схем, т. е. имеет двойную блокировку. Кнопкой SBI включается контактор КМ1, а цепь катушки контактора КМ2 разрывается одновременно размыкающимся контактом кнопки SB1 и блок-контактом КМ1.
На рис.3, г и д изображены простейшие схемы пуска и реверсирования маломощных двигателей последовательного возбуждения. Такие двигатели включаются в сеть без пусковых реостатов. По схеме рис.3, г осуществляется пуск и реверсирование двигателя последовательного возбуждения с помощью двух промежуточных реле. Реверсируется двигатель изменением направления тока в обмотке возбуждения LM. В двигателях с двумя последовательными обмотками возбуждения, создающими магнитные потоки противоположных направлений, схема включения и реверсирования имеет всего два замыкающих контакта (см. рис.3, д).
Как видно из рассмотренных схем управления, наиболее просто осуществляется автоматизация процесса пуска и реверса асинхронных двигателей с короткозамкнутым ротором. В этом случае все управление при пуске сводится к включению двигателя в питающую сеть, а при останове — к отключению его от сети.
Более сложна автоматизация пуска, торможения и останова асинхронных двигателей с фазной обмоткой ротора, асинхронных двигателей с короткозамкнутым ротором повышенной мощности, двигателей постоянного тока средней и большой мощности, многоскоростных асинхронных двигателей при ступенчатом пуске, а также синхронных двигателей. Управление этими двигателями происходит в функции времени, скорости и тока.
Кроме приведенных случаев, управление двигателями может выполняться и по принципу пути, когда двигатель пускается и тормозится при достижении рабочим органом определенного положения в пространстве. Системы, выполняющие такие функции, называются разомкнутыми, так как у них отсутствует обратная связь между выходной величиной и входной.
www.electromontag-pro.ru
Схема управления шаговым двигателем приведена на рисунке 1. Схема реализована на микросхемах простой логики. В ней используются три микросхемы К561ЛА7 и одна К561ТМ2. В качестве мощных ключей для коммутирования обмоток шагового двигателя применены составные транзисторы КТ829А, способные выдерживать ток до семи ампер.
При нажатии на одну из кнопок двигатель начинает вращаться в ту или иную сторону. Кнопки использованы двойные, поэтому при их отпускании размыкается и цепь питания обмоток шагового двигателя, что исключает протекание сквозных токов при остановке двигателя. Но есть ситуации, когда для удержания ротора двигателя в нужном положении, необходимо, чтобы через одну из обмоток протекал удерживающий ток. В этом случае контроллер должен автоматически понизить напряжение питания обмоток двигателя до необходимой величины. В данной схеме этой опции нет, здесь напряжение питания снимается с обмоток двигателя полностью.

На микросхеме DD1 собран генератор импульсов, изменение частоты этого генератора влечет за собой изменение частоты вращения шагового двигателя. Каждый импульс данного генератора поворачивает ротор на один шаг. На микросхемах DD2 и DD3 собраны логические элементы «исключающие или» и совместно с двумя триггерами DD4.1 и DD4.2, микросхемы К561ТМ2, образуют схему двухразрядного кольцевого счетчика для коммутации обмоток. Схема обеспечивает работу шагового двигателя в полушаговом режиме. Осциллограммы импульсных последователей полушагов показаны на скриншоте 1. Все обмотки двигателя зашунтированы демпфирующими диодами, устраняющими коммутационные выбросы напряжения. Микросхемы питаются через стабилизатор напряжения DA1 — КР142ЕН8Б. Максимальное входное напряжение этой равно35В. Так что и максимальное напряжение питания двигателя будет равно 35В.

Почти все элементы схемы смонтированы на печатной плате. На плате нет микросхемного стабилизатора напряжения, демпфирующих диодов, кнопок и конденсаторов фильтра. При необходимости их можно разместить на плате, изменив немного ее топологию. Скачать схему и рисунок печатной платы можно здесь.
Скачать “простая схема управления шаговым двигателем” Shema-upravl-shagov-dvigatel.rar – Загружено 1254 раза – 31 KB
Просмотров:34 046
www.kondratev-v.ru