





Двигатель (привод, мотор) является неотъемлемой частью робота, который приводит в движение не только робота, но и различные механизмы или манипуляторы, которыми оснащен робот. Одним словом мотор для робота преобразует электрическую энергию в энергию движения.
В робототехнике в основном используются три типа двигателей: двигатели постоянного тока, шаговые двигатели, сервоприводы и типа RC (с радиоуправлением).

Какой тип двигателя больше подходит для того или иного робота? Все зависит от выбранной конструкции робота. Для робота с перемещением на колесах можно выбрать несколько разновидностей конструкции:
Если классифицировать мощность двигателя, то получим следующее:
Давайте посмотрим, на положительные и отрицательные стороны каждого из двигателей.

Преимущества:— Легко доступны на рынке— Широкий спектр двигателей— Самые мощные— Легко подключить— Не обязательно использовать для больших роботов
Недостатки:— Слишком быстрые, необходим редуктор— Большое потребление— Трудно установить колеса— Дороже
Лучше всего подходит для:— Больших роботов
Преимущества:— Встроенный редуктор— Разнообразие— Не такие дорогие— Подходящая мощность для маленьких роботов— Простота установки— Среднее потребление энергии
Недостатки:— Не подходят для больших роботов— Довольно низкая скорость
Лучше всего подходит для:— Небольших роботов— Роботов с ногами
Преимущества шаговых двигателей:— Точный контроль— Разнообразие— Хорошая скорость— Не дорогие
Недостатки:— Тяжелые в сравнении с развиваемой мощностью— Большое потребление— Объемные— Трудно установить колеса— Не слишком мощные— Сложное управление
Лучше всего подходит для:— Роботов следящими за линией— Роботов решающими лабиринты
Если мы хотим что бы робот начал движение, мы должны подать на двигатель электрическое напряжение, через различные драйверы управления двигателями.
robolive.ru
Шаговые электродвигатели часто применяют в качестве привода для роботов, из за того, что они не требуют датчиков обратной связи для регулирования положений звеньев.
Такого рода электродвигатели преобразовывают с высокой точностью цифровые электрические сигналы непосредственно в дискретные угловые перемещения (шаги) ротора двигателя.

Шаговый двигатель по принципу действия можно сравнить с двигателем синхронного типа: в нем существует связь между сигналом питания и положением ротора.
Благодаря периодическим переключениям обмоток статора, его магнитодвижущее поле, поворачиваясь на определенный угол (шаг), производит поворот на такой же определенный угол ротора двигателя, представляющего собой постоянный магнит либо переменное магнитное сопротивление.
Таким способом возможно вращать вал с высокой скоростью, зная его положение в любое время. В сложных моделях выходной вал может поворачиваться и фиксироваться в любом из двухсот различных угловых положений за оборот, т. е. менее двух градусов за шаг.
Это делает шаговые двигатели идеальными для обучения роботов. К недостаткам шаговых электродвигателей относятся неустойчивость вращения при ускорении и торможении, высокая стоимость и малая мощность.
Для тяжелых промышленных роботов шаговые двигатели пока слишком дороги и маломощны, даже самые большие имеют мощность менее 1 л. с, поэтому шаговые двигатели требуют значительного совершенствования, чтобы конкурировать с двигателями постоянного тока.
В робототехнике шаговый двигатель используется для точного управления роботом или роботизированными манипуляторами.

Шаговый двигатель работает от подачи комбинаций напряжения в разных направлениях на его обмотки. Например, возьмем двигатель — Nema23 76 мм, вместо него может быть другой.
Управление осуществляется биполяным методом. Любой гибридный и биполярный шаговый двигатель будет работать с таким же управлением.
У данного шагового двигателя 2 обмотки — 4 провода, первая обмотка — черный (A) и зеленый (A*) провод, вторая обмотка — красный (B) и синий (B*). За одну смену комбинаций делается 1 шаг — 1,8 градусов. Если комбинации быстро менять, то двигатель будет быстро и точно позиционироваться — крутиться. Смена комбинаций возможна в двух направлениях, соответственно двигатель будет крутиться вперед или назад.
Управление двигателем осуществляется через специальный драйвер шагового двигателя. В основном это уже готовые устройства на микроконтроллерах AVR.
robolive.ru
Роботостроение и создание различных систем автоматики вызывает большой интерес не только у профессионалов, но и у начинающих радиолюбителей.Стремительный рост технологий отразился на современном рынке радиоэлектронных компонентов. Огромный выбор различных микроконтроллеров, датчиков, реле, плат-расширения позволяет подобно конструктору создать сложное техническое решение в домашних условиях.Если раньше для создания и внедрения системы «Умный дом» необходимо было обращаться в специализированные фирмы, то сейчас большинство элементов можно собрать самостоятельно. Любительская робототехника не отстает от промышленных образцов. Собранный домашний робот будет ездить по заданной траектории, заряжаться от солнечной панели, измерять температуру/влажность окружающей среды, производить фотографирование местности. Это далеко не полный перечень того, что можно добавить, но данная модель уже похожа по функциональности и логике, например на космический аппарат Curiosity, который исследует планету Марс.В наши дни стали снова возрождаться радиотехнические кружки, где под руководством опытных учителей, молодое поколение осваивает роботостроение. Это не только развлечение, но и большая умственная работа, требующая знания математики, физики, информатики.Многие работы можно найти в сети Интернет. Некоторое заслуживают отдельного внимания:
Рассмотрим основные моменты, которые понадобятся нам при проектировании и сборке робота.
Работы по проектированию и сборке робота начинаются с планирования бюджета. В зависимости от функциональности и используемой технической базы конечная стоимость робота может быть высокой.Для большинства проектов можно использовать не только оригинальные запчасти, но и их аналоги(копии). Это значительно удешевит проект. Многие предпочитают заказывать детали в Китайских интернет-магазинах. Стоимость заказа с бесплатной доставкой выглядит более привлекательно, чем покупка этих же деталей, но с большой наценкой в России.
 Самыми распространенными и недорогими платформами являются колесные и гусеничные. Для данных платформ существует множество готовых компонентов, поэтому они идеально подойдут в качестве начального проекта.Колесная платформа может иметь любое количество колес. Наиболее распространенные — трех и четырех колесные модели (2WD, 4WD). Из-за небольшой площади соприкосновения с поверхностью колесная платформа может проскальзывать.
Самыми распространенными и недорогими платформами являются колесные и гусеничные. Для данных платформ существует множество готовых компонентов, поэтому они идеально подойдут в качестве начального проекта.Колесная платформа может иметь любое количество колес. Наиболее распространенные — трех и четырех колесные модели (2WD, 4WD). Из-за небольшой площади соприкосновения с поверхностью колесная платформа может проскальзывать. Для уменьшения потери сцепления можно использовать резиновые шины.Повышенной проходимостью обладают гусеничные платформы. Они исключают скольжение, могут преодолевать различные искусственные и природные препятствия. Недостатком платформы является сложная механическая установка.Роботы с конечностями могут стабильно перемещаться по очень неровным поверхностям. Но самым главным недостатком данной платформы является сложность кодирования и высокая конечная стоимость.Современный рынок предлагает множество готовых решений воздушных роботов. Особой популярностью пользуются квадрокоптеры и вертолеты.
Для уменьшения потери сцепления можно использовать резиновые шины.Повышенной проходимостью обладают гусеничные платформы. Они исключают скольжение, могут преодолевать различные искусственные и природные препятствия. Недостатком платформы является сложная механическая установка.Роботы с конечностями могут стабильно перемещаться по очень неровным поверхностям. Но самым главным недостатком данной платформы является сложность кодирования и высокая конечная стоимость.Современный рынок предлагает множество готовых решений воздушных роботов. Особой популярностью пользуются квадрокоптеры и вертолеты.  Воздушные роботы идеально подходят для наблюдения и съемки поверхности с высоты, исследования труднодоступных мест. Некоторые компании активно ведут разработку и возможность использования воздушных платформ для доставки товаров. Существенный недостаток воздушной платформы — это частичная, а в большинстве случаев, полная потеря всей конструкции при аварии.
Воздушные роботы идеально подходят для наблюдения и съемки поверхности с высоты, исследования труднодоступных мест. Некоторые компании активно ведут разработку и возможность использования воздушных платформ для доставки товаров. Существенный недостаток воздушной платформы — это частичная, а в большинстве случаев, полная потеря всей конструкции при аварии. Для увеличения функциональности существующих видов платформ используют различного рода манипуляторы. Манипуляторы могут быть снабжены как одной так и десятком уникальных степеней свободы.Водные платформы не получили широкого распространения. В основном используются в научных и промышленных сферах.
Для увеличения функциональности существующих видов платформ используют различного рода манипуляторы. Манипуляторы могут быть снабжены как одной так и десятком уникальных степеней свободы.Водные платформы не получили широкого распространения. В основном используются в научных и промышленных сферах.
Для приведения в движение большинства из рассмотренных выше платформ необходим двигатель (электромотор). Это устройство которое преобразует электрическую энергию в механическую. Выбор двигателей зависит от способа передвижения робота.  Для колесных или гусеничных платформ подойдет мотор-редуктор постоянного тока. Редуктор в данном случае позволяет регулировать крутящий момент. Вал с обеих сторон мотора позволяет установить энкодер, который помогает определять угол поворота и пройденное расстояние колесом. Мощность двигателя рассчитывается исходя из веса самого робота.
Для колесных или гусеничных платформ подойдет мотор-редуктор постоянного тока. Редуктор в данном случае позволяет регулировать крутящий момент. Вал с обеих сторон мотора позволяет установить энкодер, который помогает определять угол поворота и пройденное расстояние колесом. Мощность двигателя рассчитывается исходя из веса самого робота. Шаговой двигатель осуществляет перемещение равными шагами. Шаговые двигатели управляются импульсами. Каждый импульс преобразуется в градус, на который происходит вращение. Данный вид двигателя ставится в роботах, где необходим предельно точный угол движения.
Шаговой двигатель осуществляет перемещение равными шагами. Шаговые двигатели управляются импульсами. Каждый импульс преобразуется в градус, на который происходит вращение. Данный вид двигателя ставится в роботах, где необходим предельно точный угол движения. Сервомотор состоит из двигателя постоянного тока, редуктора, электроники и поворотного потенциометра, который измеряет угол. Угол вращения составляет примерно 180 градусов. Сервомоторы обычно используют в роботах-манипуляторах, роботах с конечностями.На практике многие модели роботов содержат разные типы двигателей. Для централизованного управления используются драйверы двигателей (Motor shield).
Сервомотор состоит из двигателя постоянного тока, редуктора, электроники и поворотного потенциометра, который измеряет угол. Угол вращения составляет примерно 180 градусов. Сервомоторы обычно используют в роботах-манипуляторах, роботах с конечностями.На практике многие модели роботов содержат разные типы двигателей. Для централизованного управления используются драйверы двигателей (Motor shield).
Для преобразования управляющих сигналов малой мощности в токи, достаточные для управления моторами используют драйверы двигателей (Motor Shield)  Драйвер двигателя может только определить скорость и направление движения мотора, но не может управлять ими непосредственно из-за ограниченной выходной мощности. Поэтому использование драйвера двигателя без микроконтроллера невозможно. Логика современных драйверов двигателей позволяет управлять различными типами моторов как по раздельности, так и одновременно. При выборе драйвера необходимо обращать внимание на номинальное напряжение и силу тока.
Драйвер двигателя может только определить скорость и направление движения мотора, но не может управлять ими непосредственно из-за ограниченной выходной мощности. Поэтому использование драйвера двигателя без микроконтроллера невозможно. Логика современных драйверов двигателей позволяет управлять различными типами моторов как по раздельности, так и одновременно. При выборе драйвера необходимо обращать внимание на номинальное напряжение и силу тока.  В характеристиках обычно указывается диапазон входного напряжения и сила тока, на который он рассчитан. Несмотря на встроенные системы защиты от перегрузок не стоит подключать 5В двигатель к 3В контроллеру.Выбор контроллера (драйвера двигателей) необходимо делать после того, как будет определен и утвержден тип двигателей, которые планируется установить в роботе.
В характеристиках обычно указывается диапазон входного напряжения и сила тока, на который он рассчитан. Несмотря на встроенные системы защиты от перегрузок не стоит подключать 5В двигатель к 3В контроллеру.Выбор контроллера (драйвера двигателей) необходимо делать после того, как будет определен и утвержден тип двигателей, которые планируется установить в роботе.
Существует несколько способов управления роботом:
Проводное управлениеСамый простой способ управления роботом — проводной. Пульт управления соединяется с роботом при помощи кабеля. Не требует сложных электронных компонентов. Существенным недостатком является ограниченное перемещение. Дальность управления целиком зависит от длины кабеля. слишком длинный кабель будет постоянно цепляться и запутываться.
Беспроводное управление
Инфракрасный сигнал
Для управления роботом используется пульт. В некоторых случаях можно настроить обычный ТВ-пульт. На роботе устанавливается ИК-датчик, который подсоединяется к микроконтроллеру и передает ему управляющие сигналы. Как и при использовании пульта к ТВ, управление роботом может осуществляться на ограниченном расстоянии в прямой видимости ИК-датчика.
Bluetooth
При использовании технологии Bluetooth управление роботом становиться возможным при помощи Bluetooth-совместимых устройств (планшет, мобильный телефон, компьютер). Нет необходимости находится в прямой видимости передатчика, хотя Bluetooth имеет ограниченный диапазон работы (около 10-15 м).
Wi-Fi
Управление роботом может осуществляться из любого места, где есть доступ к сети Интернет. Необходимо только подключение wi-fi модуля робота к роутеру, имеющим выход в сеть Интернет.
GPRS/GPS
GPS используется для обнаружения расположения робота. При помощи навигации можно рассчитать курс и расстояние маршрутной точки.GSM платы предоставляют возможность звонить и принимать звонки с других телефонов, отправлять SMS на заданный номер при нажатии на определенную кнопку. Таким образом отправляя SMS с своего мобильного телефона мы сможем передавать роботу команды через GSM сеть. При этом сам робот может находится в любой точке где есть покрытие GSM сети.
Как мы все уже знаем микроконтро́ллер это микросхема, предназначенная для управления электронными устройствами. Он представляет из себя однокристальный компьютер, способный выполнять относительно простые задачи. Для взаимодействия с внешним миром микроконтроллер снабжен контактами, на которых электрический сигнал может быть включен (1) или выключен (0). Выводы могут быть использованы для чтения электрических сигналов, поступающих от различных устройств и датчиков.Современные микроконтроллеры имеют интегрированный регулятор напряжения. Это позволяет микроконтроллеру работать в широком диапазоне напряжений, который не требуют от нас подачи точного рабочего напряжения.Существует великое множество микроконтроллеров, которые могут быть использованы, но широкое распространение в наши дни получила аппаратная платформа Arduino.  Из-за кросс-платформенности, низкой стоимости, открытой архитектуре и простоте языка программирования Arduino стала пользоваться огромной популярностью среди новичков и профессионалов.Популярные проекты где применяется платформа Arduino — это построение простых систем автоматики и робототехники. С помощью данной платформы можно организовать умный дом, построить домашнюю метеостанцию, освоить роботостроение.
Из-за кросс-платформенности, низкой стоимости, открытой архитектуре и простоте языка программирования Arduino стала пользоваться огромной популярностью среди новичков и профессионалов.Популярные проекты где применяется платформа Arduino — это построение простых систем автоматики и робототехники. С помощью данной платформы можно организовать умный дом, построить домашнюю метеостанцию, освоить роботостроение.
Для изучения и измерения окружающего мира вокруг робота используются всевозможные виды датчиков. С их помощью мы сможем узнать местоположение нашего робота, определить расстояние до объектов, измерить температуру/влажность/давление, сделать снимок местности и т.д.Правильно подобранная плата расширения значительно упростит процесс добавления новых видов датчиков и избавит нас от необходимости изменения заложенной логики на этапе проектирования.Рассмотрим основные виды датчиков, доступные по цене и простоте программирования:
Ультразвуковой дальномер
Источник ультразвука испускает импульсный сигнал, а приемник улавливает отражения сигнала от различных препятствий.  Расстояние до объекта определяется на основании анализа времени прохождения сигнала туда и обратно. В отличие от инфракрасных дальномеров на ультразвуковой датчик не влияют источники света или цвет препятствия. Самый популярный ультразвуковой дальномер для радиолюбителей — HC-SR04. Он способен измерять расстояние в диапазоне от 2 до 450 см.
Расстояние до объекта определяется на основании анализа времени прохождения сигнала туда и обратно. В отличие от инфракрасных дальномеров на ультразвуковой датчик не влияют источники света или цвет препятствия. Самый популярный ультразвуковой дальномер для радиолюбителей — HC-SR04. Он способен измерять расстояние в диапазоне от 2 до 450 см.
ИК-датчик расстояния Принцип работы состоит в анализе отраженного инфракрасного излучения светодиода датчика от окружающих предметов.Предназначен для установки в механических приборах для определения расстояния до подвижных деталей конструкции. Оптоэлектронный датчик расстояния Sharp GP2Y0A21YK0F удобно использовать в робототехнических проектах. Расстояние обнаружения составляет от 100 до 550 см. Позволит предотвратить столкновение робота с препятствием.
Принцип работы состоит в анализе отраженного инфракрасного излучения светодиода датчика от окружающих предметов.Предназначен для установки в механических приборах для определения расстояния до подвижных деталей конструкции. Оптоэлектронный датчик расстояния Sharp GP2Y0A21YK0F удобно использовать в робототехнических проектах. Расстояние обнаружения составляет от 100 до 550 см. Позволит предотвратить столкновение робота с препятствием.
Гироскоп позволит определить положение и перемещение прибора в пространстве: углы крена, дифферента (тангажа) ориентируясь по вектору силы тяжести и скорости вращения. При перемещении определяет линейное ускорение и угловую скорость вокруг собственных осей X, Y и Z и дает полную картину положения. Наиболее распространенный модуль на основе чипа MPU6050. Модуль состоит из акселерометра, гироскопа и температурного сенсора.
Наиболее распространенный модуль на основе чипа MPU6050. Модуль состоит из акселерометра, гироскопа и температурного сенсора.
Цифровой датчик температуры и влажности позволяет измерять температуру и влажность окружающей среды.

Самые распространенные датчики: DHT11 и DHT22. По сравнению с датчиком DHT11, датчик DHT22 обладает высокой точностью измерения и позволяет измерять температуры ниже 0.
Датчик давления позволяет измерять атмосферное давление. К самым доступным датчикам давления относят датчик BMP180. Датчика имеет I2C интерфейс поэтому его можно подключить к любой платформе из семейства Arduino.
Газовые анализаторы позволяют обнаружить утечки пропана, бутана, метана и водорода. Также могут быть использованы для контроля задымленности помещений. В результате измерений датчик генерирует аналоговый сигнал, пропорциональный содержанию газа. Качество измерений зависит температуры и влажности окружающей среды. Таким набором характеристик обладает датчик широкого спектра газов MQ-2.
Датчик освещенности позволит нашему роботу отличать день от ночи, солнечную погоду от пасмурной, тень от света. При грамотной настройке и доработке схемы подключения позволит ориентировать солнечные панели аппарата на солнце.
it-donnet.ru

Роботизированная коробка передач – совместная разработка АвтоВАЗа совместно с немецкой компанией zf.
Робот – это все та же коробка передач 2180 с тросиковым приводом с переделанными креплениями, но вдобавок с установленным автоматическим механизмом переключения, которая разработана немецкой фирмой ZF. Автоматический механизм «актуатор» за Вас отжимает сцепление, ставит передачу, отпускает сцепление.
N – нейтраль
R – задняя передача
M – ручной режим переключения

Схема управления роботом Веста
В отличии от автомата, положение селектора P -паркинг отсутствует. Именно по-этому авто ставим либо на ручник (что чревато зимой примерзанием барабана) либо на скорость.
Запускаем автомобиль в положении «нейтрал» с выжатой педалью тормоза.
Если же Вс интересует вопрос, стоит ли покупать робот , мы Вам скажем: запишитесь на ТЕСТ-ДРАЙВ, ибо это бесплатно. Только самостоятельно ощутив работу робота, Вы сможете понять, подходит ли он вам или нет. Если же не подходит, то комплектация с механической коробкой ждет Вас.
АвтоВАЗ говорит, что коробка подойдет каждому, АМТ имеет 20 различных алгоритмов переключения. Но это не совсем правда.
Немного от себя: Если же у Вас резкий характер, и вам нужно соответствующее поведение от авто — робот не для Вас. Робот заточен под спокойную неторопливую езду на средних оборотах с плавными переключениями и под экономию топлива и диска сцепления. И сразу же возникает вопрос, как данная трансмиссия покажет себя на Весте Спорт: насколько будут изменены настройки, появится ли спортивность и т.д.
Сам по себе механизм АМТ (робота) вполне надежен: Коробка всем нам знакомая до боли, да и актуатор внушает доверия. Ресурс актуатора 10 лет, официально он не ремонтопригоден, но сейчас делают все, и починить такой актуатор не проблема, главное хорошо смазать. Но существую следующие «косяки» с роботом, но в основном причастно к первым, ранним моделям:
Долгое переключение. Как упоминалось выше, это не проблема, это особенность. Используйте ручной режим.
Сцепление Валео. Как выяснилось, Валео не подходит к Веста по массе автомобиля, именно поэтому нынешние модели получают сцепление Сакс. Валео быстро износилось, был затруднительный старт, ощущались пробуксовки и запах сцепления. Сцепление Валео получили первые модели Весты.
У тех, кто в первый раз имеет дело с автоматизированной механической трансмиссией, возникает вопрос: Как обслуживать робот? Нужно следить за следующими основными моментами:
Преимущество робота перед механикой: удобство, т.к. занята только одна нога, обе руки на руле.
Преимущество робота перед автоматом: экономичнее (Какой расход топлива?) обычного автомата, можно буксировать автомобиль, допускаются пробуксовки на бездорожье, сохранилась динамика «механики».
Так же стоит отметить, что робот имеет защиту от «кривых рук». Иными словами, хаотичное переключение селектора робота во время езды не нанесет каких-либо повреждений. К тому же, Приору как и Весту на роботе можно завести с толкача, можно таскать прицеп, буксировать автомобиль – достаточно лишь переключиться в механический режим.
Первые роботы устанавливались на Ладу Приору с двигателем 1,6л мощностью 98л.с. Но уже робот перепрограммировали под новый 127 мотор, в паре с которым и будет выпускаться Веста.
При пробуксовке во время старта к примеру, на снежном покрытии – АМТ может включить как вторую, так и третью передачу.
Возможные зависания на передаче, например, после лежачих полицейских робот не сразу включит вторую. В данном случае можно перевести в ручной режим переключения.
Если вы хотите покупать авто с салона, то Робот будет дороже механики на 25т.р. и это не много. Если же брать ремонт Коробки передач путем замены всех элементов, то ценник будет в районе 50-60 тыс. руб. Много ли это? Нет! Давайте посомтрим на конкурентов: Автомат киа рио и соляриса стоит 300 т.р. Разница колосальна.
Логичным будет вопрос, что делать, если аккумулятор автомобиля по тем или иным причинам сел. Можно ли завести Весту с роботизированной коробкой с толкача? Да, МОЖНО! В нейтрали разгоняем авто до 7 км/ч, и на ходу втыкаем селектор кпп в положение А. Главная страница
vesta2180.ru

Как выбрать подходящие двигатели для колесного робота? Ответить точно на этот вопрос в начале конструирования робота непросто. Для этого нужно знать вес робота, а он еще не построен. Однако, технические характеристики и размеры двигателей значительно влияют на окончательные параметры мобильного робота. Для того, чтобы получить полную информацию, необходимо учесть вращающий момент, скорость и мощность. Для колесного робота также необходимо подобрать диаметр колес и определить правильное передаточное число зубчатой передачи для расчета скорости его движения.
Крутящий момент двигателя - это сила, с которой он воздействует на вращаемую ось. Для того, чтобы робот мог двигаться, необходимо, чтобы эта сила превышала вес робота (выражаемый в Н/м).
Некоторые употребляют вместо понятия крутящий момент, термин вращающий момент. По сути это одно и то же. И то и другое являются моментами, просто в технике крутящий момент — это нагрузка на колесе, а вращающий момент — нагрузка в технической науке под названием «Сопротивление материалов».
Рассмотрим сильно упрощенную идеализированную модель колесного робота.
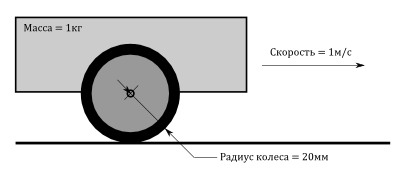
Упрощенная модель колесного робота
В нашем случае, вес робота равен 1кг, и мы хотим добиться максимальной скорости его движения 1м/с при радиусе колеса равном 20мм.
При движении по прямой на расстояние 1м, рассчитаем ускорение, необходимое для достижения скорости в 1м/с.
![\[v^2 = v_0^2 + 2ad\]](/800/600/http/quicklatex.com/cache3/41/ql_759ae940d492d5a52ff7a8a668155741_l3.png "Rendered by QuickLaTeX.com")
где  — расстояние, пройденное роботом,
— расстояние, пройденное роботом,  — его начальная скорость (стартуем с места, поэтому
— его начальная скорость (стартуем с места, поэтому  ),
),
![\[a = \frac{v^2-v_0^2}{2d}\]](/800/600/http/quicklatex.com/cache3/e6/ql_ab8399bcbef17632d10386eb56d527e6_l3.png "Rendered by QuickLaTeX.com")
где  — скорость робота,
— скорость робота,  -его ускорение.
-его ускорение.
Подставим значения, принятые в нашей модели, получим
 м/с2
м/с2
Вращающий момент, который необходим для перемещения робота и получения им ускорения, необходимого для достижения максимальной скорости рассчитывается следующим образом:
![\[M = J\alpha\]](/800/600/http/quicklatex.com/cache3/93/ql_a618e0f33880e9ba059033a693404393_l3.png "Rendered by QuickLaTeX.com")
При  — момент инерции и
— момент инерции и  — угловое ускорение, получим
— угловое ускорение, получим
![\[M = \frac{m g r a}{2}\]](/800/600/http/quicklatex.com/cache3/32/ql_281fb2c30c1b12a25bc8934a8d8bb332_l3.png "Rendered by QuickLaTeX.com")
Здесь  м/с2 — ускорение свободного падения (округлим его до 10),
м/с2 — ускорение свободного падения (округлим его до 10),  — радиус колеса,
— радиус колеса,  — масса всего робота
— масса всего робота
Подставив значения, получим
 мН·м
мН·м
Для перевода величины, выраженной в Н·м в кг·см нужно учесть, что 1Н = 0.102 кг и 1м = 100 см. Поэтому 50 мН·м = 50 · 0.102 : 1000 * 100 = 0.51 кг · см.
Полученный крутящий момент распределяется между двумя двигателями робота и его еще нужно поделить на передаточное число используемой зубчатой передачи (подробнее про зубчатые передачи можно почитать здесь).
Для расчета максимальной мощности двигателей нам понадобится частота вращения, которая выражается в оборотах в минуту
 (об/мин) =
(об/мин) = 
или в радианах в секунду
(рад/с) = 
через круговую частоту 
Подставив радиус колеса, получим
 рад/с
рад/с
или
 об/мин.
об/мин.
Мощность двигателей пропорциональна крутящему моменту и частоте вращения:
![\[P = M \times \nu\]](/800/600/http/quicklatex.com/cache3/fa/ql_f9f73fef2682639117ddaa955a5913fa_l3.png "Rendered by QuickLaTeX.com")
Подставив сюда формулы для крутящего момента и частоты, получим:
![\[P = \frac{m g r a}{2} \times \frac{\omega}{r} = \frac{m g \omega a}{2}\]](/800/600/http/quicklatex.com/cache3/44/ql_0cc364e27a28563854e54b1a25962744_l3.png "Rendered by QuickLaTeX.com")
Используя собственные значения, получим
 Вт
Вт
Опять же, мы получили суммарную мощность для всех двигателей, в нашем случае двигателя два, поэтому необходимо разделить результат на два и, как и в случае с расчетом крутящего момента, если используются зубчатые передачи, разделить на передаточное число зубчатых передач.
Обратите внимание, что мы рассчитали механическую мощность вырабатываемую двигателями, а не электрическую мощность, которую они потребляют. Необходимо учитывать КПД двигателей, который будет отличаться в зависимости от модели двигателя. Выбирать нужно двигатели, естественно, с бóльшим КПД.
Для обеспечения оптимальных характеристик лучше использовать двигатели с запасом по мощности, как минимум в два раза.
Для нашего примера двухколесного робота, с использованием передаточного числа равного 10, характеристики устанавливаемых двигателей должны быть следующими:
Вы можете пропустить чтение записи и оставить комментарий. Размещение ссылок запрещено.
robotosha.ru

На конференции по вопросам робототехники и автоматизации (IEEE ) этого года специалисты японского космического агентства Japan Aerospace Exploration Agency (JAXA) представили вниманию общественности маленького автоматизированного исследователя других планет, оснащенного твердотопливным реактивным двигателем. Помимо основного двигателя у этого робота имеются два тормозных и корректирующих двигателя, и инерциальная система, которая предназначена для управления направлением полета робота и для обеспечения его передвижений после приземления.
В корпусе 450-граммового робота, помимо двигателя, находятся аккумуляторные батареи, датчики, микроконтроллер и маховики инерциальной системы. В качестве основного двигателя используется твердотопливный реактивный двигатель Estes C11, обеспечивающий импульс в 10 ньютон-секунд. Перед запуском, который производится со специальной направляющей, робот раскручивает свои маховики и после этого поджигает топливо в реактивном двигателе. Импульса двигателя достаточно для того, чтобы забросить робота на дистанцию в 30 метров при земной гравитации, а на Луне эта дистанция может быть равна приблизительно 200 метрам.
Маховики инерциальной системы стабилизируют робота во время полета и минимизируют ущерб при его падении на поверхность. Совокупная работа основного двигателя, тормозных двигателей и инерциальной системы обеспечивают точность приземления на уровне от 30 сантиметров до 1.2 метра, что в четыре раза выше точности приземления подобного робота, оснащенного только одним основным реактивным двигателем.
Единственным недостатком такого подхода к перемещению робота является его одноразовая природа. Но это компенсируется малыми размерами и весом всей системы. К примеру, исследовательский аппарат, опущенный на поверхность другой планеты, может иметь в запасе несколько единиц или десятков таких роботов-ракет. И они, эти роботы могут быть использованы для исследований мест, куда основной аппарат добраться не может или это слишком опасно в силу различных причин.
Еще одним преимуществом нового робота является его возможность к передвижениям, которые производятся путем разгона и резкого торможения маховика инерциальной системы. Это не самый управляемый способ перемещения, однако, но его очевидным преимуществом является «замкнутость» такой двигательной системы, которая легко может быть изолирована и защищена от воздействия грязи, пыли и влаги из окружающей среды.
Опытный образец робота, продемонстрированный на конференции ICRA, не был оснащен никакой противоударной защитой, в нем не было установлено никаких датчиков и камер, способных снимать видео во время его полета. Он является лишь наглядной демонстрацией принципа, который отлично подходит для работы в условиях низкой или отсутствующей гравитации, там, где реактивная тяга является единственным доступным способом передвижения.
nowesti.ru
Denis_K 18.09.2016
В данной статье рассмотрим блоки управления моторами и способы организации движения робота. Нужные нам блоки находятся во вкладке «действие» (зеленая вкладка).

1. Средний мотор
 Блок “средний мотор” управляет средним мотором. Его можно запускать/останавливать, управлять мощностью или запускать на заданное время или обороты.Нажмите на этот блок и поставьте его рядом с блоком “начало” в программе. Он станет ярким, и появятся настройки.Моторы, как средний, так и большие подключаются к портам EV3, обозначенными буквами A, B, C, D. Подключить двигатель можно к любому из них, но при программировании необходимо правильно задать порт. Цифра 1 указывает место выбора порта.Мотору можно задать различные режимы работы. Среди доступных режимов есть “выключить” (останавливает мотор), “включить” (мотор будет работать пока его не выключат или пока не закончится программа), “включить на количество секунд” (мотор будет работать заданное количество секунд, после чего остановится), “включить на количество градусов” (мотор повернется на заданное количество градусов и остановится) и “включить на количество оборотов” (мотор сделает заданное количество оборотов и остановится). Режим работы можно выбрать, нажав на кнопку, обозначенную цифрой 2.Для каждого режима можно задать настройки работы. В четырех из пяти режимов можно указать мощность работы мотора. Мощность может принимать значения от -100 до 100. Чем больше по модулю значение, тем быстрее будет вращаться мотор. Отрицательная мощность заставляет мотор крутиться в противоположную сторону. Настройки задаются в области, обозначенной цифрой 3.
Блок “средний мотор” управляет средним мотором. Его можно запускать/останавливать, управлять мощностью или запускать на заданное время или обороты.Нажмите на этот блок и поставьте его рядом с блоком “начало” в программе. Он станет ярким, и появятся настройки.Моторы, как средний, так и большие подключаются к портам EV3, обозначенными буквами A, B, C, D. Подключить двигатель можно к любому из них, но при программировании необходимо правильно задать порт. Цифра 1 указывает место выбора порта.Мотору можно задать различные режимы работы. Среди доступных режимов есть “выключить” (останавливает мотор), “включить” (мотор будет работать пока его не выключат или пока не закончится программа), “включить на количество секунд” (мотор будет работать заданное количество секунд, после чего остановится), “включить на количество градусов” (мотор повернется на заданное количество градусов и остановится) и “включить на количество оборотов” (мотор сделает заданное количество оборотов и остановится). Режим работы можно выбрать, нажав на кнопку, обозначенную цифрой 2.Для каждого режима можно задать настройки работы. В четырех из пяти режимов можно указать мощность работы мотора. Мощность может принимать значения от -100 до 100. Чем больше по модулю значение, тем быстрее будет вращаться мотор. Отрицательная мощность заставляет мотор крутиться в противоположную сторону. Настройки задаются в области, обозначенной цифрой 3.
2. Большой мотор

Блок “большой мотор” управляет одним большим мотором.Настройки и режимы работы точно такие же, как и в “среднем моторе”.
3. Рулевое управление
 Блок “рулевое управление” создан для управления движением вашего робота. Для движения используются два больших мотора, один из которых отвечает за левую сторону, а второй за правую. Используя “рулевое управление” можно заставить вашего робота двигаться вперед-назад, останавливаться, поворачивать и разворачиваться.
Блок “рулевое управление” создан для управления движением вашего робота. Для движения используются два больших мотора, один из которых отвечает за левую сторону, а второй за правую. Используя “рулевое управление” можно заставить вашего робота двигаться вперед-назад, останавливаться, поворачивать и разворачиваться.
Так как этот блок регулирует работу двух моторов одновременно, задавать нужно два порта. Нажмите сначала на одну букву и укажите нужный порт, затем на вторую.Режимы ничем не отличаются от режимов большого и среднего моторов: выключить, включить, включить на количество секунд, включить на количество градусов, включить на количество оборотов.В настройках же появилось важное дополнение, которое называется как и сам блок — рулевое управление. Эта характеристика определяет поедет ли робот прямо, будет поворачивать или разворачиваться на месте. Можно задать значения от -100 до 100, при этом знак определяет направление поворота и чем больше по модулю значение, тем резче будет поворот. При этом автоматически будет регулироваться работа моторов: при плавном повороте оба мотора будут вращаться в одном направлении, но один будет работать быстрее, чем другой, а при резком — моторы будут вращаться в противоположном направлении.Остальные настройки совпадают с предыдущими блоками. “Рулевое управление” следует использовать для регулирования движения вашего робота
4. Независимое управление моторами
 Блок “независимое управление моторами”, как и “рулевое управление”, позволяет управлять движениями робота, но здесь настройка происходит в ручном режиме.В этом блоке вручную задается мощность и направление каждого отдельного мотора, что делает настройку более точной. Остальные характеристики совпадают с предыдущими блоками.
Блок “независимое управление моторами”, как и “рулевое управление”, позволяет управлять движениями робота, но здесь настройка происходит в ручном режиме.В этом блоке вручную задается мощность и направление каждого отдельного мотора, что делает настройку более точной. Остальные характеристики совпадают с предыдущими блоками.
На начальном этапе я рекомендую пользоваться блоком «рулевое управление» для задания движения робототехнической платформе. Этот режим является более наглядным, по сравнению с «независимым управлением моторами» и настройка каждого мотора происходит автоматически.
studrobots.ru







