





Практически в каждом устройстве, которое можно назвать роботом применяются различные типы двигателей и, как правило, большинство из них являются двигателями постоянного тока. Важно особенностью, из-за которой используются двигатели постоянного тока, является возможность осуществления вращения в противоположные стороны. Для осуществления этого используют H-мост.
 В двигателях постоянного тока, чтобы изменить направление вращения достаточно поменять полярность питания, то есть, проще говоря, поменять плюс с минусом. Из-за этого ток начинает течь в обратном направлении, что приводит к изменению магнитного потока внутри двигателя, в результате чего вал двигателя вращается в обратную сторону. Анимация ниже показывает, по какому принципу работает H-мост:
В двигателях постоянного тока, чтобы изменить направление вращения достаточно поменять полярность питания, то есть, проще говоря, поменять плюс с минусом. Из-за этого ток начинает течь в обратном направлении, что приводит к изменению магнитного потока внутри двигателя, в результате чего вал двигателя вращается в обратную сторону. Анимация ниже показывает, по какому принципу работает H-мост:
 H-мост управления двигателем
H-мост управления двигателемЛегко заметить, что изменение направления тока приводит к изменению направления вращения двигателя. Вместо этих переключателей можно собрать H-мост на транзисторах и управлять ими с помощью микроконтроллера.

Как правило, для двигателей большой мощности H-мост строится на MOSFET транзисторах. Когда-то такие H-мосты были очень популярны по экономическим соображениям, поскольку транзисторы дешевле, чем микросхема. Их часто можно встретить в бюджетных игрушечных автомобилях с дистанционным управлением.
Однако на рынке уже не один год существуют специализированные микросхемы H-мостов. Они со временем становятся все дешевле и имеют больше возможностей и безопасности. Одной из таких простых микросхем является L293D.

Это простой драйвер электродвигателя, содержащий в себе два H-моста, имеет возможность управления двигателем путем ШИМ.

То как происходит управление L293D показано в таблице ниже:

Когда на входе А и EN присутствует высокий уровень, то на выходе с тем же номером так же будет высокий уровень. Когда на входе A будет низкий и на EN высокий уровень, то на выходе мы получим низкое состояние. Подавая сигнал низкого уровня на EN, на выходе будет состояние высокого импеданса, в не зависимости от того какой сигнал будет на входе А.
Таким образом, мы можем контролировать направление движения тока, в результате чего у нас есть возможность изменять направление вращения электродвигателя.
Другой популярной микросхемой является L298. Она значительно мощнее, чем описанная ранее L293D. Микросхема L298 так же имеет в своем составе два H-моста и также поддерживает ШИМ.

Назначение выводов L298 очень похоже на L293D. Здесь так же есть два входа управления, входы EN и выходы на двигатель. Vss - это питание микросхемы, а Vs - это питание для двигателей.
 Есть так же и различие, а именно выводы CURRENT SENSING, которые служат для измерения тока потребления двигателей. Эти выводы следует подключить к массе питания через небольшой резистор, примерно 0,5 Ом.Ниже приведена схема подключения L298:
Есть так же и различие, а именно выводы CURRENT SENSING, которые служат для измерения тока потребления двигателей. Эти выводы следует подключить к массе питания через небольшой резистор, примерно 0,5 Ом.Ниже приведена схема подключения L298:

В данной схеме стоит обратить внимание на внешние диоды, подключенные к выводам электродвигателя. Они служат для отвода индукционных всплесков в двигателе, которые возникают во время торможения и изменения направления вращения. Их отсутствие может привести к повреждению микросхемы. В драйвере L293D эти диоды уже имеются внутри самой микросхемы.
Следующая микросхема H-моста – эта TB6612, новый драйвер с очень хорошими характеристиками, набирающий все большую популярность.

Вы можете заметить, что все эти драйверы электродвигателей одинаковы в управлении, но в TB6612 выходы спарены, из-за большой мощности.Максимальное напряжение питания TB6612 составляет 15В, а максимальный ток 1,2 А. При этом максимальный импульсный ток составляет 3,2A.

www.joyta.ru
 |
| L293D |
Как и обещал, следующую статью посвящаю L293D. Микросхема эта очень известная, тем не менее хочу поделиться личными впечатлениями от работы с ней. Это четырёхканальная микросхема, которая позволяет осуществлять работу как с двумя двигателями (при возможности прямого и обратного включения), так и с четырьмя (но в этом случае двигатели будут работать только в одну сторону). Нас, разумеется, в роботоконструировании интересует больше первый способ, потому что вращать двигатели обычно надо и туда и обратно - в первую очередь приводящие в движение колёса. Согласно даташиту (datasheet - инструкция к детали/устройству/программе), микросхема L293D снабжена защитными диодами, предохраняющими электронику от избыточного тока. На сколько я понимаю, у L293 такой фишки нет, и их обязательно надо припаивать самому. Напряжение питания этой микросхемы от 4,5 до 36 вольт. Это её очень большой плюс, так как регулярно возникает ситуация, что одну схему надо питать одним напряжением, другую другим, всё это нужно засунуть в одно устройство - компактно и так чтоб ничего не сгорело. В любом случае, проблем это добавляет, а здесь можно питать как угодно - лишь бы ток был постоянный. Переходим к току. Вот здесь начинаются минусы, так как максимально допустимый ток на канал - 600 мА. Есть, правда, оговорка, что с должной системой охлаждения ток можно поднять до 1А, а короткими импульсами микруха выживет даже выдавая на пиках 1,2 ампера, но не чаще чем раз в 100 микросекунд. Это всё чудесно, однако, в реалиях мы сталкиваемся с жутким дефицитом этого самого тока. Как ни накачивал я её ни импульсами, ни постоянным током - ничего путного у меня не выходило. Роботы ездили медленно и плохо, а те что побольше - вообще не ездили. Значит ли это, что микросхема ни на что не годна? Нет. Просто, её применение, как и у любого электронного компонента, имеет свои ограничения. Моё мнение - для системы, приводящей большого робота в движение эта микруха не годится. Скажем так, она пригодна для более деликатных задач, а выполнять она их умеет. Дело в том, что L293D - не просто может работать по принципу "включил-поехал", хотя она и так может работать. Эта микросхема также способна управлять двигателями с помощью широтно-импульсной модуляции, что открывает возможности управления серво-двигателями - двигателями, способными поворачиваться на заданный угол и поддерживать это положение. А также полезна для всех остальных двигателей не слишком большой мощности для регулирования скорости их вращения. Короче, штука очень удобная, а по началу, пока роботы простые и лёгкие, она подойдёт и для управления их колёсами. Кстати, никто не мешает сдвоить оба канала (соединить их параллельно), тогда можно будет подцепить только один двигатель, но уже выдавать на него 1,2 ампера, при этом с возможностью гонять его вперёд-назад. Меня, правда, такое положение дел всё время не устраивало, потому что тогда нужна ещё микросхема для организации поворотов, а робот, который не умеет поворачивать не слишком-то интересен.
Теперь несколько слов о подключении. Как мною уже говорилось в предыдущей статье, паять я микросхемы категорически не советую. Вообще нигде. Ну, может быть, конечно, цель создать неразборное устройство, где всё надо намертво впаять, дорог каждый миллиметр пространства и каждый бюджетный рубль - паяйте, я так не люблю. Я паяю панельки, и всё вставляю в них. Были любители и у радиоламп ножки прямо без панелек припаивать, но это была эпоха дефицита, а сейчас для микросхем этого дела навалом, а вот сжечь её очень легко, особенно по началу, когда много не знаешь. Да и вынуть её потом в случае ошибки тоже уже без паяльного фена, по одной ножке - затея 50 на 50. Вам оно надо? В связи с этим предлагаю не рисковать и пожертвовать пять рублей за своё спокойствие. Переходим к распайке контактов. Всего их тут 16, левая и правая сторона почти симметричны, так что разобраться очень несложно. Нумерация выводов, как у всех микросхем идёт сверху вниз по левой стороне и снизу вверх по правой. Верх (первая и последняя нога) обозначены на микросхеме полукруглой выбоинкой. Выводы 1 и 9 - выводы "enable" - они служат для управления двигателями по принципу - на ноге есть напряжение (логическая единица) - двигатель включён, нет напряжения (уровень земли - логический ноль) - двигатель не работает. Вывод 1 управляет 1 и 2 каналом, вывод 9 - 3 и 4. Я вешал на них напряжение питания и не мучился. Выводы, обозначенные буквой А (2, 7, 10 и 15) - это на самом деле входы (inputs) - на них подаётся управляющий сигнал - или постоянный, или в виде ШИМ (об этом позже). Входы эти соответственно для первого-четвёртого каналов. Рядом с ними находятся выходы (outputs) - ноги 3,6,11 и 14. Теперь вешаем один мотор одним контактом на 3, другим на 6 - подали напряжение на 2 - мотор закрутился в одну сторону, выключили, подали на 7 - закрутился в другую. Идея понятна? Пробуем со второй стороной то же самое. Наконец выводы 4, 5 и 12, 13 - это земля (ground), отрицательный контакт батареек вешается сюда. Все четыре вывода можно смело соединить вместе. К ним же рекомендуют припаивать охлаждение - металлическую пластинку обычно из меди, но это если предполагается перегрев схемы. Я это охлаждение на неё никогда не вешал. Ну и самое главное - напряжение питания. Здесь есть два входа - 8 и 16, если напряжение робота, как у меня, небольшое - 5-6 вольт, можно их оба повесить на него. Если напряжение питания высокое (микруха-то у нас аж до 36 вольт выдерживает), а моторчики слабенькие, то вывод 16 - питание микросхемы, а 8 - питание моторов. На последок: схема возможного включения L293D
Переходим к распайке контактов. Всего их тут 16, левая и правая сторона почти симметричны, так что разобраться очень несложно. Нумерация выводов, как у всех микросхем идёт сверху вниз по левой стороне и снизу вверх по правой. Верх (первая и последняя нога) обозначены на микросхеме полукруглой выбоинкой. Выводы 1 и 9 - выводы "enable" - они служат для управления двигателями по принципу - на ноге есть напряжение (логическая единица) - двигатель включён, нет напряжения (уровень земли - логический ноль) - двигатель не работает. Вывод 1 управляет 1 и 2 каналом, вывод 9 - 3 и 4. Я вешал на них напряжение питания и не мучился. Выводы, обозначенные буквой А (2, 7, 10 и 15) - это на самом деле входы (inputs) - на них подаётся управляющий сигнал - или постоянный, или в виде ШИМ (об этом позже). Входы эти соответственно для первого-четвёртого каналов. Рядом с ними находятся выходы (outputs) - ноги 3,6,11 и 14. Теперь вешаем один мотор одним контактом на 3, другим на 6 - подали напряжение на 2 - мотор закрутился в одну сторону, выключили, подали на 7 - закрутился в другую. Идея понятна? Пробуем со второй стороной то же самое. Наконец выводы 4, 5 и 12, 13 - это земля (ground), отрицательный контакт батареек вешается сюда. Все четыре вывода можно смело соединить вместе. К ним же рекомендуют припаивать охлаждение - металлическую пластинку обычно из меди, но это если предполагается перегрев схемы. Я это охлаждение на неё никогда не вешал. Ну и самое главное - напряжение питания. Здесь есть два входа - 8 и 16, если напряжение робота, как у меня, небольшое - 5-6 вольт, можно их оба повесить на него. Если напряжение питания высокое (микруха-то у нас аж до 36 вольт выдерживает), а моторчики слабенькие, то вывод 16 - питание микросхемы, а 8 - питание моторов. На последок: схема возможного включения L293D  Слева вариант 2 канала на один двигатель, справа - по двигателю на канал. Диоды игнорируем и паяем только в случае, если у нас L293 (без D). Ну вот, кажется всё, что хотел сказать.
Слева вариант 2 канала на один двигатель, справа - по двигателю на канал. Диоды игнорируем и паяем только в случае, если у нас L293 (без D). Ну вот, кажется всё, что хотел сказать.По теме рекомендую также к ознакомлению:http://robocraft.ru/blog/electronics/563.htmlhttp://zelectro.com.ua/L293DДаташит: http://www.ti.com/lit/ds/symlink/l293d.pdf
dmitry-emelyanov.blogspot.com
Сохранить или поделиться
SunFounder L293D – это четырехканальный драйвер, позволяющий работать с большими токами и напряжениями. В основном это означает, что с помощью микросхемы L293D вы можете использовать двигатели постоянного тока и источники питания до 36 вольт, микросхема L293D также обеспечивает максимальный ток до 600 мА на канал. Микросхема L293D представляет собой разновидность Н-мостов, которые, как правило, используются для управления подачей напряжения (и его полярностью) на нагрузку (например, на двигатель для управления направлением и скоростью его вращения).
 Плата расширения L293D Motor Driver Shield (для Arduino)
Плата расширения L293D Motor Driver Shield (для Arduino)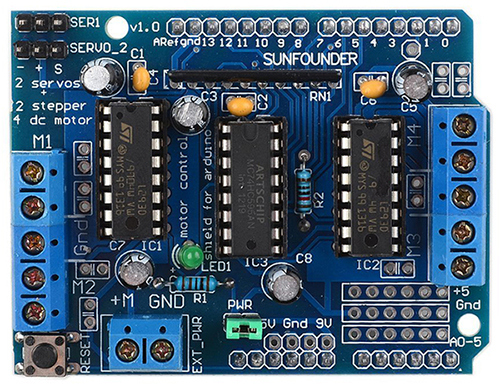 Плата расширения L293D Motor Driver Shield. Вид сверху
Плата расширения L293D Motor Driver Shield. Вид сверхуПлата расширения занимает все цифровые выводы, кроме 0, 1, 2 и 13. Также остаются свободными все аналоговые выводы, которые выведены на плате на отдельную линейку.
Код библиотеки и примеры использования:
Библиотека Adafruit Motor Shield (на базе L293D) версия 1.0Скорость задается числом от 0 до 255 (стоп-полный ход).
Направление задается числами:
 Плата расширения L293D Motor Driver Shield. Схема электрическая принципиальная
Плата расширения L293D Motor Driver Shield. Схема электрическая принципиальная Микросхема L293D
Микросхема L293DL293D представляет собой четыре сильноточных драйвера из половин Н-мостов. Она предназначена для управления двунаправленными приводами с токами до 600 мА и напряжениями от 4,5 В до 36 В. Микросхема предназначена для управления индуктивными нагрузками, такими как реле, соленоиды, двигатели постоянного тока, шаговые двигатели, а также другими нагрузками, требующими высокого тока/напряжения в приложениях с положительным питанием. Все входы TTL совместимы. Драйверы включены в пары: драйверы 1 и 2 включаются выводом 1,2EN, а драйверы 3 и 4 включаются выводом 3,4EN. Когда на разрешающий вход подается высокий логический уровень, соответствующие драйверы включаются, их выходы становятся активными, а их состояние синфазно соответствующим входам. Когда на разрешающий вход подается низкий логический уровень, эти драйверы выключаются, их выходы отключаются и остаются в состоянии высокого сопротивления. При правильных сигналах на входах каждая пара драйверов формирует полный Н-мост, способный управлять направлением в приложениях с электродвигателями и соленоидами.
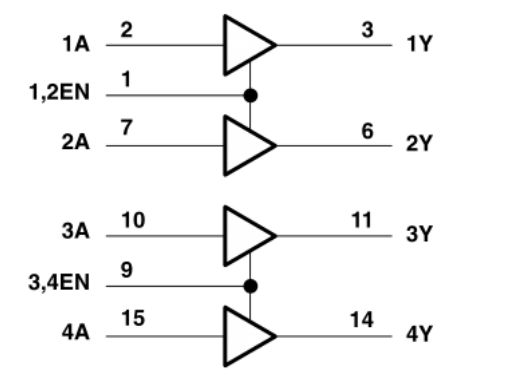 Схема логики микросхемы L293D
Схема логики микросхемы L293D| H | H | H |
| L | H | L |
| X | L | Z |
H – высокий уровень; L – низкий уровень; X – не имеет значения; Z – высокое сопротивление (выключен).
 Распиновка микросхемы L293D
Распиновка микросхемы L293D| 1 | En1,2 | Вывод включения для управления драйверами 1 и 2 |
| 2 | Вход 1A | Вход для управления 1Y |
| 3 | Выход 1Y | Выход, подключается к двигателю |
| 4 | GND | Земля и теплоотвод |
| 5 | GND | Земля и теплоотвод |
| 6 | Выход 2Y | Выход, подключается к двигателю |
| 7 | Вход 2A | Вход для управления 2Y |
| 8 | Vcc2 | Источник питания для драйверов 4,5–36 В |
| 9 | En3,4 | Вывод включения для управления драйверами 3 и 4 |
| 10 | Вход 3A | Вход для управления 3Y |
| 11 | Выход 3Y | Выход, подключается к двигателю |
| 12 | GND | Земля и теплоотвод |
| 13 | GND | Земля и теплоотвод |
| 14 | Выход 4Y | Выход, подключается к двигателю |
| 15 | Вход 4A | Вход для управления 4Y |
| 16 | Vcc1 | Источник питания внутренней логики (максимум 7 В) |
 Микросхема 74HC595
Микросхема 74HC595Микросхема 74HC595 состоит из 8-разрядного регистра сдвига и регистра хранения с параллельными выходами с тремя состояниями. Она преобразует последовательный ввод в параллельный вывод, поэтому вы сможете сохранить порты ввода/вывода вашего микроконтроллера для других целей. 74HC595 широко используется для управления несколькими светодиодами и многосегментными дисплеями. «Три состояния» означает, что вы можете установить выходные выводы в состояния высокого уровня, низкого уровня и «высокого импеданса». Благодаря фиксации данных, на мгновенный вывод ничего не повлияет во время процесса сдвига; также вы можете легко каскадно подключать на выходы дополнительные микросхемы 74HC595.
 Распиновка микросхемы 74HC595
Распиновка микросхемы 74HC595| Q0 – Q7 | Выходные выводы 8-разрядных параллельных данных, могут непосредственно управлять 8 светодиодами 7-сегментного индикатора. |
| Q7' | Последовательный выходной вывод, подключается к выводу DS другой микросхемы 74HC595 при последовательном соединении микросхем 74HC595. |
| MR | Вывод сброса, активен при низком уровне; в данном случае напрямую подключен к линии 5В. |
| SHcp | Вход временной последовательности для регистра сдвига. При нарастающем фронте данные в регистре сдвига перемещаются на один бит. То есть, данные на Q1 перемещаются на Q2, и так далее. Во время спада данные в регистре сдвига не меняются. |
| STcp | Вход временной последовательности для регистра хранения. Во время нарастающего фронта данные из регистра сдвига перемещаются в регистр хранения. |
| CE | Вывод включения выхода, активен при низком уровне. |
| DS | Входной вывод последовательных данных. |
| VCC | Источник питания с положительным напряжением. |
| GND | Корпус. |
| Плата расширения L293D Motor Driver Shield (для Arduino) на AliExpress | 1 | 107.74 руб. / 1.8 USD (на 25 февраля 2017) | 107.74 руб. / 1.8 USD |
| Плата расширения L293D Motor Driver Shield (для Arduino) на AliExpress | 1 | 110.74 руб. / 1.85 USD (на 25 февраля 2017) | 110.74 руб. / 1.85 USD |
| Плата расширения L293D Motor Driver Shield (для Arduino) на Ebay | 1 | 119.72 руб. / 2.05 USD (на 25 февраля 2017) | 119.72 руб. / 2.05 USD |
Сохранить или поделиться
На сайте работает сервис комментирования DISQUS, который позволяет вам оставлять комментарии на множестве сайтов, имея лишь один аккаунт на Disqus.com.
 Руководство про работе с платой расширения Arduino Motor Shield
Руководство про работе с платой расширения Arduino Motor ShieldРуководство по работе с платой расширения Arduino Motor Shield с простым проектом. Обзор Arduino Motor Shield – это плата расширения, которая позволяет управлять различными нагрузками, которыми обычные выводы Arduino управлять не могут. Плата...
radioprog.ru
Обзор чипа L293D - Двухтактный четырехканальный драйвер двигателей постоянного тока с защитными диодами.
Микросхема L293D — это сборка из четырёх H-полумостов. Это может быть использовано для независимого управления двумя двигателями постоянного тока, с возможностью включения реверса. Также чип может быть использован для контроля одного биполярного шагового двигателя.
Управление осуществляется через транзисторно-транзисторную логику (TTL), а возвратные (flyback) диоды уже встроены в чип. Это означает, что для управления моторами понадобятся лишь сами моторы, L293D и микроконтроллер вроде Arduino. Чип может быть легко установлен на breadboard.
L293D может выдавать до 600 мА на канал. Если этого недостаточно можно соединить несколько микросхем параллельно и тем самым поднять предельные характеристики.
Характеристики:
- Напряжение питания управления (Vcc1): 4,5 - 5 В
- Напряжение питания нагрузки (Vcc2): Vcc1 – 36 В
- Максимальный постоянный ток: 600 мА на канал
- Максимальный пиковый ток (до 100 мкс): 1200 мА на канал
Скачать скетч (файл расширения flp устанавливается на Arduino при помощи Flprog)
Ссылки на компоненты:
Ардуино UNO - http://ali.pub/z6n3u
L293D Драйвер двигателя - http://ali.pub/1jjvk9
Джойстик KY-023 - http://ali.pub/1jlk8u
Мотор Шестерни для Arduino - http://ali.pub/1jlkwr
Схема подключения чипа L293D

arduinoprom.ru
 Существует достаточно много самых различных схем для управления электродвигателями. Они различаются как мощностью, так и элементной базой, на основе которой они выполнены.
Существует достаточно много самых различных схем для управления электродвигателями. Они различаются как мощностью, так и элементной базой, на основе которой они выполнены.
Мы остановимся на самом простом драйвере управления двигателями, выполненном в виде полностью готовой к работе микросхемы. Эта микросхема называется L293D и является одной из самых распространенных микросхем, предназначенных для этой цели.
L293D содержит сразу два драйвера для управления электродвигателями небольшой мощности (четыре независимых канала, объединенных в две пары). Имеет две пары входов для управляющих сигналов и две пары выходов для подключения электромоторов. Кроме того, у L293D есть два входа для включения каждого из драйверов. Эти входы используются для управления скоростью вращения электромоторов с помощью широтно модулированного сигнала (ШИМ).
L293D обеспечивает разделение электропитания для микросхемы и для управляемых ею двигателей, что позволяет подключить электродвигатели с большим напряжением питания, чем у микросхемы. Разделение электропитания микросхем и электродвигателей может быть также необходимо для уменьшения помех, вызванных бросками напряжения, связанными с работой моторов.
Принцип работы каждого из драйверов, входящих в состав микросхемы, идентичен, поэтому рассмотрим принцип работы одного из них.
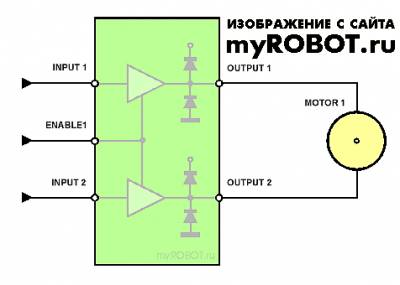
К выходам OUTPUT1 и OUTPUT2 подключим электромотор MOTOR1. На вход ENABLE1, включающий драйвер, подадим сигнал (соединим с положительным полюсом источника питания +5V). Если при этом на входы INPUT1 и INPUT2 не подаются сигналы, то мотор вращаться не будет.
Если вход INPUT1 соединить с положительным полюсом источника питания, а вход INPUT2 - с отрицательным, то мотор начнет вращаться.
Теперь попробуем соединить вход INPUT1 с отрицательным полюсом источника питания, а вход INPUT2 - с положительным. Мотор начнет вращаться в другую сторону.
Попробуем подать сигналы одного уровня сразу на оба управляющих входа INPUT1 и INPUT2 (соединить оба входа с положительным полюсом источника питания или с отрицательным) - мотор вращаться не будет.
Если мы уберем сигнал с входа ENABLE1, то при любых вариантах наличия сигналов на входах INPUT1 и INPUT2 мотор вращаться не будет.
Представить лучше принцип работы драйвера двигателя можно, рассмотрев следующую таблицу: ENABLE1 INPUT1 INPUT2 OUTPUT1 OUTPUT2 1 0 0 0 0 1 1 0 1 0 1 0 1 0 1 1 1 1 1 1
Теперь рассмотрим назначение выводов микросхемы L293D.
Входы ENABLE1 и ENABLE2 отвечают за включение каждого из драйверов, входящих в состав микросхемы. Входы INPUT1 и INPUT2 управляют двигателем, подключенным к выходам OUTPUT1 и OUTPUT2. Входы INPUT3 и INPUT4 управляют двигателем, подключенным к выходам OUTPUT3 и OUTPUT4. Контакт Vs соединяют с положительным полюсом источника электропитания двигателей или просто с положительным полюсом питания, если питание схемы и двигателей единое. Проще говоря, этот контакт отвечает за питание электродвигателей. Контакт Vss соединяют с положительным полюсом источника питания. Этот контакт обеспечивает питание самой микросхемы. Четыре контакта GND соединяют с "землей" (общим проводом или отрицательным полюсом источника питания). Кроме того, с помощью этих контактов обычно обеспечивают теплоотвод от микросхемы, поэтому их лучше всего распаивать на достаточно широкую контактную площадку.
Характеристики микросхемы L293D
напряжение питания двигателей (Vs) - 4,5...36V напряжение питания микросхемы (Vss) - 5V допустимый ток нагрузки - 600mA (на каждый канал) пиковый (максимальный) ток на выходе - 1,2A (на каждый канал) логический "0" входного напряжения - до 1,5V логическая "1" входного напряжения - 2,3...7V скорость переключений до 5 kHz. защита от перегрева
Примечание: Об особенностях L293DNE - аналога микросхемы L293D
Раздел: [Конструкции средней сложности] Сохрани статью в: Оставь свой комментарий или вопрос:www.cavr.ru
Схемы для управления электрическими моторами, используемые в разных конструкциях (машинах, роботах), различаются как мощностью, так и радиоэлементами, на основе которых они выполнены. Естественно в последнее время предпочтение стали отдавать драйверам управления выполненных на специализированных микросхемах. Одна из наиболее распространённых - микросхема L293D, что содержит сразу два драйвера для управления электродвигателями небольшой мощности (четыре независимых канала, объединенных в две пары). Она имеет две пары входов для управляющих сигналов и две пары выходов для подключения электромоторов. Кроме того, у L293D есть два входа для включения каждого из драйверов. Эти входы используются для управления скоростью вращения электромоторов с помощью ШИМ. Даташит можно посмотреть по ссылке.

Схема управления двигателем постоянного тока подходит для моторов малой и средней мощности. Она позволяет контролировать до 6 двигателей. Контроллер может обеспечить ток до 600 мА на канал, а мост на транзисторах может обеспечить и более ампера на каждый канал.

Принцип работы драйвера двигателя можно понять, рассмотрев таблицу.


el-shema.ru
Драйвер управления двумя коллекторными двигателями до 1А (L293x) Серия микросхем L293, не смотря на свои недостатки, пользуется большой популярностью в любительском роботостроении. Особенно она популярна у начинающих. Драйверы управления коллекторными двигателями на основе L293 просты как при подключении, так и в управлении. Так же микросхемы широко распространены и приемлемы по цене.
В серии присутствует две основных модификации – с индексом “D” и без оного. Буква “D” в названии говорит о том, что данная микросхема имеет встроенные защитные диоды на выходе – L293D. Соответственно остальные (L293N, L293E и т.д.) встроенных диодов не имеют. Для всех микросхем без индекса “D” установка защитных диодов на выходах является обязательным условием подключения, в противном случае микросхема долго не прослужит. Другим немаловажным различием в модификациях является максимальный рабочий ток. Микросхема с индексом “D” может продолжительно работать с нагрузкой до 600mA на каждый канал, а все остальные до 1А на канал. При необходимости можно повысить нагрузочную способность вдвое – соединить параллельно оба канала микросхемы и подключить к одному двигателю.
Теперь о недостатках микросхем серии L293x. Микросхемы не отличаются маленьким потреблением, сильно греются и на них имеет место быть падение напряжения (до 1,5-1,7 вольт), что необходимо учитывать при подаче питания на двигатели. Все эти недостатки происходят из особенностей выходных каскадов серии L293 – они выполнены на обычных транзисторах.
Мы давно и успешно используем данную серию микросхем в своих конструкциях. Одну из них хотим предоставить вашему вниманию.
Обычное включение микросхем серии L293x очень простое – достаточно подключить питание логики, питание двигателей и выводы управления подключить к микроконтроллеру (для L293N(E) – добавить внешние защитные диоды). Направление вращения задается изменением логических уровней на входах каждого из каналов, что требует для управления двумя двигателями четырех выводов порта микроконтроллера и дополнительно еще двух для подачи ШИМ на каждый канал EN (если вы не используете ШИМ, то достаточно подать на данные выводы питание либо высокий лог. уровень с МК ) Мы решили немного изменить схему управления. В представленной схеме полное управление двигателями осуществляется вместо шести выводов контроллера – четырьмя.

Это стало возможно при использовании микросхемы стандартной логики 74HC00. В нашей схеме изменение направления вращения каждого из двигателей осуществляется путем изменения логических уровней на DIR1 и DIR2. По умолчанию на этих входах установлен низкий лог. уровень. Достаточно изменить его на высокий лог. уровень и двигатели будут крутиться в другую сторону. ШИМ подается соответственно на PWM1 и PWM2.
Дополнительно в схему включен линейный стабилизатор напряжения LM2940. Его задачей является дополнительная подпитка общей схемы при отсутствии в конструкции своего стабилизатора. Подача питания на двигатели может осуществляться как из общей шины питания вашей конструкции, так и из дополнительного источника – переключается перемычкой.
Драйвер так же может быть использован при постройке простого робота без использования микроконтроллера для соревнований следование по линии. (См. Сенсор линии на основе LM3111 ).

В схеме может быть установлена любая микросхема из серии L293x, в исполнении DIP-16. При использовании L293D распаивать внешние защитные диоды не надо.
Так как микросхемы L293x довольно сильно нагреваются в процессе работы, настоятельно рекомендуется установка радиатора. Мы используем старые радиаторы от различных плат ПК – отпиливаем необходимого размера. Самая простая установка радиатора осуществляется следующим путем – тонким слоем покрываем сверху корпус микросхемы термопастой, за исключением 1-2 мм корпуса по краям, затем аккуратно на свободные от термопасты участки наносим немного супер-клея и устанавливаем радиатор. Старайтесь установить радиатор сразу ровно, так как супер-клей схватывает очень прочно и что-либо потом исправить будет проблематично. С установленным радиатором за работоспособность микросхемы на предельных нагрузках уже можно не беспокоится
В целях уменьшения габаритов драйвера была разведена двухсторонняя печатная плата. Сложность изготовления повысилась но мы постарались сделать как можно более широкие токопроводящие дорожки. Технология изготовления платы не отличается от стандартного ЛУТа, за исключением необходимости точного сведения сторон. Переходы между сторонами платы выполнены с помощью кусочков проводника, запаянных с обоих сторон (либо выводных элементов).

Плата была досконально протестирована в работе как с питанием двигателей от общей шины, так и с дополнительным источником – проблем не выявлено.
Схема в формате sPlan 6.0 и разводка платы в формате Sprint Layout 4.0 под ЛУТ вы можете скачать ниже.
www.servodroid.ru








