





Работа гистерезисного двигателя основана на действии гистерезисного момента. На рис.2.8 показаны два постоянных магнита, создающих поле статора.

Рис.2.8. Принцип действия гистерезисного двигателя
Между ними расположен цилиндр (ротор) из магнитно-твердого материала. Под действием внешнего магнитного поля ротор намагничивается. На стороне ротора, обращенной к северному полюсу постоянного магнита, возбуждается южный полюс, а на стороне ротора, обращенной к южному полюсу постоянного магнита, — северный полюс.
На ротор начинают действовать силы, направленные радиально к его поверхности. Если полюса постоянного магнита вращать вокруг ротора, то вследствие явления магнитного запаздывания (гистерезиса) активная часть ротора не будет перемагничиваться одновременно с изменением направления вращающегося магнитного поля и между осью поля ротора и осью внешнего поля появится угол γ.
Явление магнитного запаздывания заключается в том, что частицы ферромагнитного материала (помещенного во внешнее магнитное поле), представляющие собой элементарные магниты, стремятся ориентироваться в соответствии с направлением внешнего поля. Если внешнее поле изменит свое направление, то элементарные частицы меняют свою ориентацию. Однако повороту элементарных частиц препятствуют в магнитно-твердых материалах внутренние силы молекулярного трения. Для изменения направления этих частиц необходима определенная МДС, вследствие чего перемагничивание ротора несколько отстает от изменения направления внешнего поля. Это отставание (магнитное запаздывание) характеризуется углом гистерезисного сдвига γ между вектором магнитного потока ротора Ф и вектором магнитного потока обмотки статора Ф (рис. 2.8). Этот угол зависит исключительно от магнитных свойств материала ротора.
№ 32
Измерение давления в неподвижной жидкости сводится к измерению силы F, действующей на поверхности S стенки, ограничивающей среду – объект измерения. Можно рассмотреть три случая: а) измерение с помощью приемника давления на стенке, состоящего обычно из отверстия, просверленного в стенке и соединенного с измерительным прибором; б) измерение деформации стенки, находящейся под действием давления; в) измерение посредством датчика давления, преобразующего входной сигнал (давление) в выходной электрический сигнал, несущий информацию о величине давления и его изменении во времени.
Приемник давления.
Если датчик расположен в близи приемника давления, то ошибка измерения, связанная с запаздыванием и присутствием измерительного прибора, невелика при условии, что объем канала и датчика мал по сравнению с полным объемом жидкости, давление или разрежение, в которой измеряются.
Непосредственное измерение давления.
Помещая на ограничивающей стенке, находящейся под давлением, измерительные тензоэлементы, можно измерить их деформацию в зависимости от приложенного давления.
Труба, в частности, может играть роль эффективного чувствительного элемента, деформирующегося под действием давления. Но она может подвергаться деформации также из-за изменения окружающих условий, вызывающих механические или термические напряжения, вследствие чего изменяются ее форма или свойства материала.
Если речь идет о системе трубопроводов, то предпочтительно установить параллельно исследуемому трубопроводу специальную манометрическую трубку. Такая трубка, выполнена из специально подобранного материала, может сочетать большую деформацию, позволяющую увеличить чувствительность, с требованиями точности, что связано с нагружением ниже предела текучести, малым коэффициентом линейного расширения и т.д.
Реализованная таким образом измерительная трубка по существу представляет собой датчик давления.
Датчики давления.
Чувствительным элементом датчика давления в большинстве случаев является динамометрический элемент, какой-либо, из параметров которого может изменяться под действием силы F=PS.
Если трубка закрыта с одного конца, то приложенное давление Р вызывает одновременно ее осевое удлинение и радиальное растяжение. Такая трубка снабжена средствами преобразования этих механических величин в электрический сигнал и передачи этого электрического сигнала, представляет собой основной элемент датчика.
Размеры трубки определяют в зависимости от максимально допустимого напряжения.
Свободный объем трубчатых датчиков может достигать нескольких кубических сантиментов, но он практически остается неизменным, т.к. деформация трубки очень мала. Датчики такого типа имеют хорошую чувствительность, поскольку форма прибора не реагирует на измеряемое давление и изменение объема во всем диапазоне измерений пренебрежимо мало.
В качестве чувствительного элемента можно использовать также мембрану. Разность давлений по обе ее стороны соответствует результирующей силе F, а деформацию можно характеризовать следующими величинами: в любой точке мембраны – радиальной и тангенциальной составляющими, в центре мембраны – ее прогибом.
При одном и том же давлении Р деформация мембраны тем больше, чем больше радиус R и чем меньше ее толщина е. Чувствительность измерений повышается с увеличением деформации, но при этом возрастают и внутренние напряжения, что вызывает опасность отклонения характеристики от линейности. Могут также возникать гистерезисные явления, связанные с неполной обратимостью деформации. Следует отметить, что с увеличением отношения R/e уменьшается собственная частота F0. Поэтому величину отношения e/R нужно выбирать компромиссной, учитывая, что с одной стороны, допустимые напряжения, а с другой стороны – собственную частоту, которую желательно иметь как можно более высокой. Выбор величины оттого отношения зависит от характеристик материала мембраны.
Действие мембраны может сводиться к преобразованию давления в силу, и динамометрический элемент, находящийся на мембране, обеспечивает измерение этой силы. В зависимости от конкретных условий пользуется трубкой или кольцом, работающими на сжатии, либо тонкой пластинкой или скобой, работающими на изгиб. Мембрана, играющая, по существу, роль поршня, может в этом случае быть достаточно жесткой, а ее чувствительность обеспечивается гофрировкой.
В капсулах, образованных двумя гофрированными мембранами с загнутыми краями, с паяными по окружности может создаваться разряжение путем откачки воздуха (барометрические капсулы), либо, наоборот, они могут снабжаться отверстием для закачки жидкости под известным давлением Р0 – давлением отсчета.

 - уравнение деформации.
- уравнение деформации.

 - тангенциальная деформация.
- тангенциальная деформация.
 - прогиб.
- прогиб.
 - собственная частота.
- собственная частота.
№ 33
studfiles.net
В настоящее время в схемах автоматики получили весьма широкое распространение синхронные гистерезисные микродвигатели. Статор обычного гистерезисного двигателя ничем не отличается от статоров синхронных и асинхронных машин. Пакет статора набирается из изолированных листов электротехнической стали. В полузакрытых (с неширокой прорезью) пазах располагается обычная трехфазная или двухфазная (в конденсаторных двигателях) обмотка, которая при подключении к сети переменного тока создает вращающееся магнитное поле. Ротор большинства гистерезисных двигателей представляет собой сплошной или шихтованный полый цилиндр из магнитотвердого материала, имеющего широкую петлю гистерезиса (обладающего большой остаточной намагниченностью), и располагается на магнитной или немагнитной втулке. Магнитные схемы гистерезисных двигателей с различными роторами представлены на рис.38.
Принцип действия гистерезисного двигателя рассмотрим на примере двигателя со сплошным массивным ротором (рис.39). Вращающий момент такого двигателя можно представить как сумму двух моментов: основного гистерезисного Мг, обусловленного наличием большой остаточной намагниченности, и момента от вихревых токов Мв:
М= Мг + Мв.


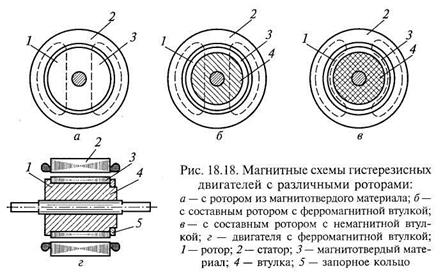
Рис.38. Магнитные схемы гистерезисных двигателей с различными роторами:
а — с ротором из магнитотвердого материала; б — с составным ротором с ферромагнитной втулкой; в — с составным ротором с немагнитной втулкой; г — двигателя с ферромагнитной втулкой; 1 — ротор; 2 — статор; 3 — магнитотвердый материал; 4 — втулка; 5 — запорное кольцо
Момент от вихревых токов возникает в результате взаимодействия вращающегося магнитного поля двигателя с вихревыми токами ротора. По своей природе это асинхронный момент. Он равен нулю при синхронизме и вследствие большого активного сопротивления массивного ротора максимален при пуске
(n = 0). Если бы двигатель обладал только моментом от вихревых токов, то его механическая характеристика не отличалась бы ничем от механической характеристики обычного асинхронного двигателя с повышенным активным сопротивлением ротора, имеющего sк > 1.

Рис.39. Принцип действия гистерезисного двигателя:
а — схема сил при невращающемся магнитном поле; б — схема сил при вращающемся магнитном поле
Возникновение гистерезисного момента объясняется наличием у материала ротора широкой петли гистерезиса. При асинхронной скорости вращения ротор, находясь в магнитном поле, все время перемагничивается. При этом ось поля ротора, изготовленного из магнитотвердого материала, при наличии момента сопротивления на валу отстает от оси вращающегося магнитного поля на некоторый угол 9. В результате взаимодействия поля ротора с опережающим его вращающимся магнитным полем статора возникает вращающий гистерезисный момент Мг.
Если ротор гистерезисного двигателя поместить в магнитное поле, то он намагнитится, его области спонтанной намагниченности — элементарные магнитики будут ориентированы по силовым линиям магнитного поля. На рис.39 схематично показаны два элементарных магнитика. В результате взаимодействия внешнего поля, которое для наглядности представлено в виде двух полюсов магнита, с элементарными магнитиками ротора возникнут силы F = Fn, которые в положении ротора, соответствующем, показанному на рис.38, а, будут направлены радиально. Момент, действующий на ротор в этом случае, будет равен нулю.
Если полюсы магнита, а следовательно, внешнее магнитное поле вращать относительно ротора, то элементарные магнитики будут поворачиваться вслед за полем полюсов, однако вследствие молекулярного трения, которое у магнитотвердых материалов весьма значительно, они будут отставать от поля полюсов на некоторый угол 6. Силы взаимодействия F между элементарными магнитиками и полем полюсов магнита в этом случае (см.39, б) кроме радиальных составляющих Fn будут иметь еще тангенциальные составляющие Ft которые и создадут вращающий гистерезисный момент.

Рис.40. Механические характеристики гистерезисного двигателя
На рис.40 представлены механические характеристики гистерезисного двигателя — зависимости гистерезисного момента Mг, момента от вихревых токов Мв и суммарного момента М= Мг + Мв от частоты вращения n при круговом поле, синусоидально распределенном в пространстве. У гистерезисных двигателей с шихтованным ротором вихревые токи практически отсутствуют, поэтому Мв = 0 и механическая характеристика М = Mг = f(n) имеет вид прямой линии.
Роторы гистерезисных двигателей по конструктивному исполнению можно разделить на три группы.
1. Роторы (сплошные или шихтованные), целиком изготовленные из магнитотвердого материала (см. рис.38, а).
2. Сборные роторы, состоящие из полого цилиндра (сплошного или шихтованного), изготовленного из магнитотвердого материала и ферромагнитной втулки (см. рис.38, б). Такие роторы обычно применяются в случае, если магнитотвердый материал имеет малую магнитную проницаемость μ (сравнительно небольшую индукцию насыщения Вm при большой коэрцитивной силе Нс).
3. Сборные роторы, состоящие из активной части — полого (сплошного или шихтованного) цилиндра из магнитотвердого материала — и немагнитной (μ = 1) втулки из алюминия или пластмассы (см. рис.38, в). Такие роторы применяются в том случае, когда магнитотвердый материал имеет сравнительно большую магнитную проницаемость μ (большую Вm при сравнительно небольшой Нс).
Наибольшее распространение в настоящее время получили роторы второй и третьей групп. В некоторых двигателях активная часть ротора изготовляется не из листов, а из проволоки, полос или пресс-порошка.
Положительные качества синхронных гистерезисных двигателей следующие:
большие пусковой момент и момент входа в синхронизм;
независимость момента входа в синхронизм от момента инерции;
плавность входа в синхронизм — отсутствие рывка;
незначительное изменение тока — на 20...30 % от пуска (n = 0) до холостого хода (n = nс) и на 1... 3 % от холостого хода до номинальной нагрузки;
сравнительно высокий КПД, достигающий в некоторых двигателях 60 %;
малое время разгона;
большая механическая прочность и симметрия ротора, что позволяет создавать высокоскоростные двигатели, в том числе гидродвигатели;
способность одного и того же ротора работать в магнитных полях различной полюсности — полисинхронизм ротора, позволяющий создавать многоскоростные синхронные двигатели, хотя и неравноценные по качеству на различных скоростях из-за различного намагничивания активного материала ротора;
высокая температурная стабильность пусковых и рабочих характеристик, обусловленная тем, что изменение температуры влияет лишь на значение активного сопротивления обмотки статора;
высокая надежность, малый уровень шума и сравнительно небольшие габариты и масса.
Недостатки синхронных гистерезисных двигателей, ограничивающие области их применения, сводятся к следующим:
низкий коэффициент мощности (cosφ), не превосходящий 0,3...0,45;
малая стабильность мгновенной скорости вращения — качание ротора при резко изменяющихся нагрузках;
большой технологический разброс характеристик двигателя, объясняющийся тем, что даже незначительные отклонения от установленного режима термической обработки ведут к значительным изменениям свойств магнитотвердых материалов;
высокая стоимость магнитотвердых материалов и сложность их механической обработки.
cyberpedia.su
Работа этих двигателей основана на действии гистерезисного момента.
Под действием магнитного поля статора ротор намагничивается.
Если поле начинает вращаться то под действием гистерезиса, магнитного запаздывания, магнитное поле статора и ротора будут направлены под углом друг к другу. Благодаря этому углу и создается момент.
Этот угол зависит от ширины петли гистерезиса, чем шире петля, тем больше угол , тем больше момент.
Применение обычной стали для изготовления ротора не обеспечивает гистерезисного момента достаточной величины. Только магнитно-твердые материалы, например такие, как викаллой,дают возможность получить большой гистерезисный момент. Роторы гистерезисных двигателей обычно делают сборными. Магнитно-твердая часть выполняется в виде шихтованного или массивного кольца /,размещенного на втулке 2(рис. 23.8,б).Последняя жестко посажена на вал 3.

Ротор таких двигателей делают не шихтованным и в нем наводятся вихревые токи также создающие момент. Моменты суммируются.
ЭМ.СM. 10.4. 12.01.2001. 26.03.2005.
Гистерезисные двигатели могут работать как в синхронном, так и в асинхронном режимах, но асинхронный режим неэкономичен.
Достоинства этих двигателей:
1. Простота конструкции.
2. Бесшумность и надежность.
3. Большой пусковой момент.
4. Сравнительно высокий КПД.
5. Малый пусковой ток.
Недостатки:
1. Малый COS= 0.4 -0.5.
Отличительной чертой этих машин является то, что магнитный поток в них при работе не меняет знака а пульсирует.
Пульсирующий поток можно разложить на постоянную и переменную составляющие.
Постоянная составляющая потока ЭДС не наводит, а переменная наводит ЭДС в обмотке.
Индукторные синхронные машины служат для получения высокочастотных напряжений.
Одна из конструкций таких машин имеет два статора с обмотками, одну обмотку возбуждения между ними и зубчатый ротор.
Суммарное магнитное сопротивление машины постоянно и постоянен магнитный поток. Поэтому ЭДС в обмотке возбуждения отсутствует.
Магнитные сопротивления каждого статора переменные.

Индукторная синхронная машина обратима, т. е. она может работать не только в генераторном, но и в двигательном режиме. Индукторные синхронные двигатели позволяют получать весьма малые частоты вращения без применения механических редукторов. Синхронная частота вращения такого двигателя при частоте питающего напряжения f1 зависит от числа зубцовZ2; в сердечнике ротора:п = f1*60/Z2.Например, приf1 = 50Гц иZ2 == 100получим п, = 50* 60/100 = 30об/мин.
ЭМ.СM. 10.5. 14.01.2007. 23.03.2008.
[Осин И.Л. Шакарян Ю.Г. Электрические машины. М. «Высшая школа», 1980. 304 с. С. 124-131.]
Более высокие показатели в отношении устойчивости и управляемости синхронной машины можно получить, если расположить на роторе две взаимно перпендикулярные обмотки возбуждения.
При подключении двух одинаковых обмоток возбуждения к двухфазному источнику переменного напряжения с частотой скольжения по обмоткам индуктора будут протекать синусоидальные токи.
Эти токи создадут вращающееся магнитное поле возбуждения, частота вращения которого относительно ротора будет такой же, как в асинхронной машине.
Синхронные машины, содержащие на роторе двухфазную обмотку возбуждения, питающуюся переменными токами частоты f2~sfu называются асинхронизированными.
Советские ученые и инженеры внесли большой вклад в разработку теории и создание этих типов машин. В СССР были разработаны и введены в эксплуатацию первые в мире асинхронизированные гидрогенераторы мощностью 50 МВт и турбогенераторы мощностью 200 МВт, асинхронизированные двигатели мощностью 315—2000 кВт, приливной генератор-двигатель мощностью 400 кВт, разработаны синхронный компенсатор продольно-поперечного возбуждения мощностью 320 MB-А, турбогенератор мощностью 800 МВт.
За рубежом большое внимание уделено созданию асинхронизированных генераторов для ветроэлектрических установок {мощностью до 4,5 МВт), гидроаккумулирующих электростанций {мощностью до 400 МВт), электромеханических преобразователей на основе этих машин (мощностью до 60 МВт).
studfiles.net
В настоящее время в схемах автоматики получили весьма широкое распространение синхронные гистерезисные микродвигатели. Статор обычного гистерезисного двигателя ничем не отличается от статоров синхронных и асинхронных машин. Пакет статора набирается из изолированных листов электротехнической стали. В полузакрытых (с неширокой прорезью) пазах располагается обычная трехфазная или двухфазная (в конденсаторных двигателях) обмотка, которая при подключении к сети переменного тока создает вращающееся магнитное поле. Ротор большинства гистерезисных двигателей представляет собой сплошной или шихтованный полый цилиндр из магнитотвердого материала, имеющего широкую петлю гистерезиса (обладающего большой остаточной намагниченностью), и располагается на магнитной или немагнитной втулке. Магнитные схемы гистерезисных двигателей с различными роторами представлены на рис. 18.18.
Принцип действия гистерезисного двигателя рассмотрим на примере двигателя со сплошным массивным ротором (рис. 18.19). Вращающий момент такого двигателя можно представить как сумму двух моментов: основного гистерезисного МГ, обусловленного наличием большой остаточной намагниченности, и момента от вихревых токов Мв: М= МГ + Мв.
Момент от вихревых токов возникает в результате взаимодействия вращающегося магнитного поля двигателя с вихревыми токами ротора. По своей природе это асинхронный момент. Он равен нулю при синхронизме и вследствие большого активного сопротивления массивного ротора максимален при пуске (n = 0). Если бы двигатель обладал только моментом от вихревых токов, то его механическая характеристика не отличалась бы ничем от механической характеристики обычного асинхронного двигателя с повышенным активным сопротивлением ротора, имеющего sK> 1.

Возникновение гистерезисного момента объясняется наличием у материала ротора широкой петли гистерезиса. При асинхронной скорости вращения ротор, находясь в магнитном поле, все время перемагничивается. При этом ось поля ротора, изготовленного из магнитотвердого материала, при наличии момента сопротивления на валу отстает от оси вращающегося магнитного поля на некоторый угол θ. В результате взаимодействия поля ротора с опережающим его вращающимся магнитным полем статора возникает вращающий гистерезисный момент МГ.
Если ротор гистерезисного двигателя поместить в магнитное поле, то он намагнитится, его области спонтанной намагниченности — элементарные магнитики будут ориентированы по силовым линиям магнитного поля. На рис. 18.19 схематично показаны два элементарных магнитика. В результате взаимодействия внешнего поля, которое для наглядности представлено в виде двух полюсов магнита, с элементарными магнитиками ротора возникнут силы F = Fnкоторые в положении ротора, соответствующем, показанному на рис. 18.18, а, будут направлены радиально. Момент, действующий на ротор в этом случае, будет равен нулю.
Если полюсы магнита, а следовательно, внешнее магнитное поле вращать относительно ротора, то элементарные магнитики будут поворачиваться вслед за полем полюсов, однако вследствие молекулярного трения, которое у магнитотвердых материалов весьма значительно, они будут отставать от поля полюсов на некоторый угол θ. Силы взаимодействия F между элементарными магнитиками и полем полюсов магнита в этом случае (см. рис. 18.19, б) кроме радиальных составляющих Fnбудут иметь еще тангенциальные составляющие Ft, которые и создадут вращающий гистерезисный момент.

На рис. 18.20 представлены механические характеристики гистерезисного двигателя — зависимости гистерезисного момента МГ, момента от вихревых токов Мви суммарного момента М = MГ + Мвот частоты вращения n при круговом поле, синусоидально распределенном в пространстве. У гистерезисных двигателей с шихтованным ротором вихревые токи практически отсутствуют, поэтому Мв = 0 и механическая характеристика М= МГ= f(n) имеет вид прямой линии.
Роторы гистерезисных двигателей по конструктивному исполнению можно разделить на три группы.
1. Роторы (сплошные или шихтованные), целиком изготовленные из магнитотвердого материала (см. рис. 18.18, а).
2. Сборные роторы, состоящие из полого цилиндра (сплошного или шихтованного), изготовленного из магнитотвердого материала и ферромагнитной втулки (см. рис. 18.18, б). Такие роторы обычно применяются в случае, если магнитотвердый материал имеет малую магнитную проницаемость μ(сравнительно небольшую индукцию насыщения Вmпри большой коэрцитивной силе Нс).
3. Сборные роторы, состоящие из активной части — полого (сплошного или шихтованного) цилиндра из магнитотвердого материала — и немагнитной (μ = 1) втулки из алюминия или пластмассы (см. рис. 18.18, в). Такие роторы применяются в том случае, когда магнитотвердый материал имеет сравнительно большую магнитную проницаемость μ(большую Втпри сравнительно небольшой Нс).
Наибольшее распространение в настоящее время получили роторы второй и третьей групп. В некоторых двигателях активная часть ротора изготовляется не из листов, а из проволоки, полос или пресс-порошка.
Положительные качества синхронных гистерезисных двигателей следующие:
большие пусковой момент и момент входа в синхронизм;
независимость момента входа в синхронизм от момента инерции;
плавность входа в синхронизм — отсутствие рывка;
незначительное изменение тока — на 20... 30 % от пуска (n = 0) до холостого хода (n = nс) и на 1... 3 % от холостого хода до номинальной нагрузки;
сравнительно высокий КПД, достигающий в некоторых двигателях 60%;
малое время разгона;
большая механическая прочность и симметрия ротора, что позволяет создавать высокоскоростные двигатели, в том числе гидродвигатели;
способность одного и того же ротора работать в магнитных полях различной полюсности — полисинхронизм ротора, позволяющий создавать многоскоростные синхронные двигатели, хотя и неравноценные по качеству на различных скоростях из-за различного намагничивания активного материала ротора;
высокая температурная стабильность пусковых и рабочих характеристик, обусловленная тем, что изменение температуры влияет лишь на значение активного сопротивления обмотки статора;
высокая надежность, малый уровень шума и сравнительно небольшие габариты и масса.
Недостатки синхронных гистерезисных двигателей, ограничивающие области их применения, сводятся к следующим:
низкий коэффициент мощности (cosφ), не превосходящий 0,3...0,45;
малая стабильность мгновенной скорости вращения — качание ротора при резко изменяющихся нагрузках;
большой технологический разброс характеристик двигателя, объясняющийся тем, что даже незначительные отклонения от установленного режима термической обработки ведут к значительным изменениям свойств магнитотвердых материалов;
высокая стоимость магнитотвердых материалов и сложность их механической обработки.
Глава 19
infopedia.su
Количество просмотров публикации Гистерезисные двигатели - 72
Особенности управления пуском СД средней и большой мощности
Роторы указанных СД часто выполняют явнополюсными, а в полюсные башмаки закладывают специальную пусковую обмотку. Как правило, используется асинхронный пуск СД, суть которого сводится к следующему. Под действием подведенного к статору напряжения в нем возникает ВМП. При одной паре полюсов и частоте 50 Гц ось поля статора повернется на 180о через 0,01 с. При этом магнитные полюса статора изменяются на противоположные. За счёт инерционности неподвижного ротора за указанное время он почти не изменит своего пространственного положения (угловая скорость инерционных масс скачком измениться не может). Возникающие при этом моменты взаимодействия магнитных полюсов статора и ротора будут компенсировать друг друга, и ротор будет оставаться неподвижным.
При асинхронном пуске СД обмотка возбуждения ротора отключается от источника постоянного тока и замыкается на добавочное сопротивление RДОБ=(10¸20)RОВ. Двигатель разгоняется как асинхронный. Когда частота вращения ротора n достигнет подсинхронной, равной (0,94¸0,96)n1, ОВ ротора переключают с RДОБ на источник постоянного тока. После этой операции ротор немного ускоряется и ʼʼвтягиваетсяʼʼ в синхронизм.
В ряде случаев используют частотный пуск СД, обмотка статора которого подключена к инвертору с регулируемой частотой, плавно поднимаемой от нуля до номинального значения. Аналогичный способ изменения частоты вращения синхронных микродвигателей используется в системах синхронной связи.
Гистерезисный двигатель (ГД) - ϶ᴛᴏ синхронный реактивный двигатель, вращающий момент которого создается за счёт магнитного гистерезиса материала ротора. Статор такого двигателя имеет трех- или двухфазную обмотку, которая создает ВМП. Ротор ГД (рис. 4.3) часто делают сборным: 1 – кольцо из магнитотвердого материала; 2 – магнитомягкая втулка; 3 – вал.
Рис.4.3
В момент времени, когда вектор вращающегося потока Ф1 статора занимает положение А (рис.4.4, а) элементарные магнитики М1 и М2 ротора ориентируются вдоль этого потока. Силы взаимодействия FЭМ магнитиков М1, М2, создающих поток Ф2, направлены вдоль потока Ф1 и вращающего момента не создают. При перемещении потока статора в положение Б в том же направлении будут поворачиваться и элементарные магнитики (рис. 4.4, б). При этом вследствие явления гистерезисного запаздывания магнитики М1 и М2 не сразу повернутся на тот же угол, что и поток Ф1, и между потоками Ф1 и Ф2 образуется угол гистерезисного запаздывания gГ. Вследствие этого наряду с радиальными появятся тангенциальные составляющие Ft, которые и создают гистерезисный момент МГА асинхронного режима
,
где k – коэффициент, зависящий от конструкции машины.
Гистерезисный момент МГА не зависит от угловой скорости ротора. Радикальный способ увеличения МГА – применение магнитотвердых материалов с высокой коэрцитивной силой НС и петлей гистерезиса, близкой к прямоугольной.
Рис.4.5
В синхронном режиме магнитное поле статора и ротор вращаются с одинаковой угловой скоростью, и перемагничивание ротора не происходит. ГД работает как СД с постоянными магнитами на роторе. Отличие состоит в том, что угол отставания оси поля ротора от оси поля статора не может превысить угла gГ, т.к. в противном случае начинается перемагничивание ротора. Следовательно, наибольшее значение момента МГС, развиваемое ГД в синхронном режиме, равно МГА. При моменте сопротивления, превышающем МГА, ротор выходит из синхронизма. Угол gГ обычно не превышает 20¸25°.
Зависимость момента МГ идеального ГД от скольжения S представлена на рис.4.5. Пунктиром показана зависимость момента сопротивления МС от скольжения S. Кривая 1 соответствует случаю, когда МС<MГА, кривая 2 – когда МС достигает значения МГА при скольжении Sa. В первом случае ГД работает в синхронном режиме, а во втором случае – в асинхронном режиме. Механические характеристики реальных ГД не абсолютно жесткие. Частота вращения ГД может достигать 30000 об/мин, КПД – 80%, мощность на валу – 0,1¸200 Вт. Потребляемый ГД ток изменяется всего лишь на 20¸30% при изменении режима работы от КЗ (пуск) до холостого хода, что позволяет использовать ГД в повторно-кратковременном режиме.
referatwork.ru
Читайте также:
|
В настоящее время в схемах автоматики получили весьма широкое распространение синхронные гистерезисные … микродвигатели. Статор обычного гистерезисного двигателя ничем не отличается от статоров синхронных и асинхронных машин. Пакет статора набирается из изолированных листов электротехнической стали. В полузакрытых (с неширокой прорезью) пазах располагается обычная трехфазная или двухфазная (в конденсаторных двигателях) обмотка, которая при подключении к сети переменного тока создает вращающееся магнитное поле. Ротор большинства гистерезисных двигателей представляет собой сплошной или шихтованный полый цилиндр из магнитотвердого материала, имеющего широкую петлю гистерезиса (обладающего большой остаточной намагниченностью), и располагается на магнитной или немагнитной втулке. Магнитные схемы гистерезисных двигателей с различными роторами представлены на рис. 18.18.
Принцип действия гистерезисного двигателя рассмотрим на примере двигателя со сплошным массивным ротором (рис. 18.19). Вращающий момент такого двигателя можно представить как сумму двух моментов: основного гистерезисного МГ, обусловленного наличием большой остаточной намагниченности, и момента от вихревых токов Мв: М= МГ + Мв.

Момент от вихревых токов возникает в результате взаимодействия вращающегося магнитного поля двигателя с вихревыми токами ротора. По своей природе это асинхронный момент. Он равен нулю при синхронизме и вследствие большого активного сопротивления массивного ротора максимален при пуске (n = 0). Если бы двигатель обладал только моментом от вихревых токов, то его механическая характеристика не отличалась бы ничем от механической характеристики обычного асинхронного двигателя с повышенным активным сопротивлением ротора, имеющего sK> 1.

Возникновение гистерезисного момента объясняется наличием у материала ротора широкой петли гистерезиса. При асинхронной скорости вращения ротор, находясь в магнитном поле, все время перемагничивается. При этом ось поля ротора, изготовленного из магнитотвердого материала, при наличии момента сопротивления на валу отстает от оси вращающегося магнитного поля на некоторый угол θ. В результате взаимодействия поля ротора с опережающим его вращающимся магнитным полем статора возникает вращающий гистерезисный момент МГ.
Если ротор гистерезисного двигателя поместить в магнитное поле, то он намагнитится, его области спонтанной намагниченности — элементарные магнитики будут ориентированы по силовым линиям магнитного поля. На рис. 18.19 схематично показаны два элементарных магнитика. В результате взаимодействия внешнего поля, которое для наглядности представлено в виде двух полюсов магнита, с элементарными магнитиками ротора возникнут силы F = Fnкоторые в положении ротора, соответствующем, показанному на рис. 18.18, а, будут направлены радиально. Момент, действующий на ротор в этом случае, будет равен нулю.
Если полюсы магнита, а следовательно, внешнее магнитное поле вращать относительно ротора, то элементарные магнитики будут поворачиваться вслед за полем полюсов, однако вследствие молекулярного трения, которое у магнитотвердых материалов весьма значительно, они будут отставать от поля полюсов на некоторый угол θ. Силы взаимодействия F между элементарными магнитиками и полем полюсов магнита в этом случае (см. рис. 18.19, б) кроме радиальных составляющих Fnбудут иметь еще тангенциальные составляющие Ft, которые и создадут вращающий гистерезисный момент.

На рис. 18.20 представлены механические характеристики гистерезисного двигателя — зависимости гистерезисного момента МГ, момента от вихревых токов Мви суммарного момента М = MГ + Мвот частоты вращения n при круговом поле, синусоидально распределенном в пространстве. У гистерезисных двигателей с шихтованным ротором вихревые токи практически отсутствуют, поэтому Мв = 0 и механическая характеристика М= МГ= f(n) имеет вид прямой линии.
Роторы гистерезисных двигателей по конструктивному исполнению можно разделить на три группы.
1. Роторы (сплошные или шихтованные), целиком изготовленные из магнитотвердого материала (см. рис. 18.18, а).
2. Сборные роторы, состоящие из полого цилиндра (сплошного или шихтованного), изготовленного из магнитотвердого материала и ферромагнитной втулки (см. рис. 18.18, б). Такие роторы обычно применяются в случае, если магнитотвердый материал имеет малую магнитную проницаемость μ (сравнительно небольшую индукцию насыщения Вmпри большой коэрцитивной силе Нс).
3. Сборные роторы, состоящие из активной части — полого (сплошного или шихтованного) цилиндра из магнитотвердого материала — и немагнитной (μ = 1) втулки из алюминия или пластмассы (см. рис. 18.18, в). Такие роторы применяются в том случае, когда магнитотвердый материал имеет сравнительно большую магнитную проницаемость μ (большую Втпри сравнительно небольшой Нс).
Наибольшее распространение в настоящее время получили роторы второй и третьей групп. В некоторых двигателях активная часть ротора изготовляется не из листов, а из проволоки, полос или пресс-порошка.
Положительные качества синхронных гистерезисных двигателей следующие:
большие пусковой момент и момент входа в синхронизм;
независимость момента входа в синхронизм от момента инерции;
плавность входа в синхронизм — отсутствие рывка;
незначительное изменение тока — на 20… 30 % от пуска (n = 0) до холостого хода (n = nс) и на 1… 3 % от холостого хода до номинальной нагрузки;
сравнительно высокий КПД, достигающий в некоторых двигателях 60%;
малое время разгона;
большая механическая прочность и симметрия ротора, что позволяет создавать высокоскоростные двигатели, в том числе гидродвигатели;
способность одного и того же ротора работать в магнитных полях различной полюсности — полисинхронизм ротора, позволяющий создавать многоскоростные синхронные двигатели, хотя и неравноценные по качеству на различных скоростях из-за различного намагничивания активного материала ротора;
высокая температурная стабильность пусковых и рабочих характеристик, обусловленная тем, что изменение температуры влияет лишь на значение активного сопротивления обмотки статора;
высокая надежность, малый уровень шума и сравнительно небольшие габариты и масса.
Недостатки синхронных гистерезисных двигателей, ограничивающие области их применения, сводятся к следующим:
низкий коэффициент мощности (cosφ), не превосходящий 0,3…0,45;
малая стабильность мгновенной скорости вращения — качание ротора при резко изменяющихся нагрузках;
большой технологический разброс характеристик двигателя, объясняющийся тем, что даже незначительные отклонения от установленного режима термической обработки ведут к значительным изменениям свойств магнитотвердых материалов;
высокая стоимость магнитотвердых материалов и сложность их механической обработки.
refac.ru
Исторически – первая область применения гистерезисных двигателей – это счетчики времени. В них использовались малополюсные гистерезисные двигатели со встроенным редуктором. Гистерезисные двигатели применяются так же для завода пружины механических часов, в качестве привода выключателей в программных механизмах, для подачи бумаги в регистрирующих приборах.
В области гироскопии ГД практически не имеют конкурентов. Здесь выгодно используются все их положительные свойства. К данной области примыкают иные инерционные электроприводы, например, электроприводы для центрифуг и центробежных распылителей, которые находят применение в пищевой промышленности, медицине, а также моделировании перегрузок в машиностроении.
Еще одной областью применения гистерезисных двигателей являются устройства записи и воспроизведения звука и изображения, где ГД используются для вращения дисков магнитофонов, магнитных головок видеомагнитофонов, для перемещения ленты в киноаппаратах и в фототелеграфных устройствах.
Гистерезисные преобразователи используются также в качестве муфт, тахогенераторов, генераторов постоянной частоты и демпферов, в частности, для космических объектов.
С повышением энергетических показателей ГД успешно используется в приводе вентиляторов, мешалок, бытовых приборов, автоматических устройств, синхронных транспортеров, станков, в намоточных устройствах текстильной промышленности, в инерционных аккумуляторах энергии и т.д.
Особенности ГД определяют наиболее предпочтительнее области применения: приборный (при небольших мощностях) управляемый электропривод, групповой привод механизмов.
К настоящему времени ГД нашли широкое применение в маломощных управляемых приводах и системах автоматического управления. Их используют в авиации, в объектах навигации, в маркшейдерских устройствах для привода гироскопов, в атомной энергетике, в пищевой, химической и медицинской промышленностях для привода центрифуг, центробежных распылителей и турбомолекулярных насосов, в устройствах записи воспроизведения информации для вращения дисков и магнитных головок, для перемещения ленты в киноаппаратах, фототелеграфах и магнитофонах; в счетчиках времени и программных механизмах часовой промышленности; в качестве муфт, тахогенераторов, демпферов и т.д.
Однако ГД малопригоден там, где требуется высокая точность поддержания углового положения ротора относительно вращающейся синхронной системы координат при отсутствии информации об этом положении и высокая степень линейности характеристик управления.
anboder.narod.ru







