Технология изготовления и применения, управляемого индукторного привода (ИП) является передовой и наиболее перспективной в области силового электропривода. Индукторный двигатель (ИД) имеет простую и надёжную конструкцию.
Ротор – зубчатый без обмоток, не имеет стержней и постоянных магнитов, набирается из листов электротехнической стали.
Статор – зубчатый, шихтованный, обмотка в виде катушек, устанавливаемых на зубцы (полюсы) и объединённых в несколько фаз.
Катушки не имеют пересекающихся лобовых частей, что повышает их долговечность и обеспечивает легкую ремонтопригодность (достаточно заменить одну катушку, вышедшую из строя, при этом соседние катушки остаются не тронутыми).

Питается ИД от блока управления, с применением IGBT транзисторов, путём поочерёдной подачи импульсов напряжения на катушки по сигналам от датчика положения ротора, что обеспечивает формирование механической характеристики практически в любом диапазоне. Изменением частоты следования импульсов регулируется частота вращения ротора в широких пределах при сохранении неизменным КПД. Изменением длительности импульсов напряжения регулируется момент и мощность двигателя.
Программно управляемая микропроцессорная система, позволяет осуществлять коррекцию естественной механической характеристики при реализации электропривода для тяговой, вентиляторной, крановой, экскаваторной и другими типами нагрузок.
ИД характеризуется длительной и безотказной работой в динамических режимах с частыми пусками и остановками. При этом пуск механизма осуществляется плавно. В ИД отсутствуют пусковые токи. При запуске величина токов не превышает номинальных значений. Максимальная частота управляющих импульсов не превышает 250 – 300 Гц.
ИД обладает уникальным свойством, принципиально отличающим его от других электрических машин, которое обеспечивает его повышенную живучесть, – это отсутствие обмоток ротора, отсутствие скользящего контакта, магнитная и электрическая независимость его фаз. Поэтому повреждение какой-либо одной или нескольких катушек не приводит к полной потере работоспособности привода, как у двигателей постоянного и переменного тока, а только частично снижает его мощность.
По сравнению с частотно-регулируемым асинхронным двигателем индукторный двигатель имеет более высокий КПД (на 3–5 %) при таких же габаритах.
Основные преимущества индукторного привода (ИП), определенные в результате многолетнего опыта разработок и исследований, выполненных как в нашей стране, так и за рубежом:


Электродвигатели ИД-45 хода бурового станка СБШ-250, мощность 45 кВт

Электродвигатель ИД-120 вращения бурового става СБШ-250, мощность 120 кВт изготовлен в корпусе двигателя постоянного тока ДПВ-52, мощностью 60 кВт.

Электродвигатель ИД-1,1. Мощность 1,1 кВт

Электродвигатель ИД-2000 привода гребного винта морского буксира мощность 2 МВт

Электродвигатель ИД-1250, мощность 1250 кВт (заказчик ОАО «Алросса»)
Индукторный тяговый электродвигатель
Первый этап применения индукторного тягового двигателя предусматривает его работу в классическом варианте, т.е. с применением редуктора. При внедрении второго варианта (без редуктора) индукторный двигатель располагается на оси колесной пары, обслуживание редуктора, кожухов, опорных подшипников – отпадает.

Рис. - Ротор и статор разрабатываемого индукторного тягового двигателя для горнорудной промышленности
Заявленная для разработки мощностью двигателя составляет 520 кВт.

Рис. - Внешний вид разрабатываемого индукторного тягового электродвигателя
Индукторный привод ИП-40
На железнодорожном транспорте, работающем на переменном однофазном напряжении, в качестве вспомогательных приводов (вентилятор обдува, компрессор, масляный насос и пр.) используются асинхронные двигатели. Существует два основных способа преобразования однофазного напряжения для питания 3-х фазных асинхронных двигателей. Первый - это преобразование однофазного напряжения в трехфазное, второй – использование искусственной, конденсаторной фазы. Оба способа имеют недостатки в части качества питающего напряжения, которые негативно сказываются на работе асинхронных электрических машин.
Разработаны приводы для однофазной сети с номинальным напряжением 10 000 В, для тяговых агрегатов в горнорудной промышленности. Индукторный привод вентиляторов обдува оборудования и индукторный привод компрессора с индукторным двигателем ИД-40. Двигатель ИД-40 изготавливается с массогабаритными параметрами асинхронных двигателей типа НВА-55, АНЭ-225, АЭ-92 и их аналогов, применяемых на железнодорожном транспорте. В таблице предоставлены технические характеристики двигателей.
Таблица 1 - Параметры сети, блока управления и двигателя
| Параметр | Двигатель ИД-40В | Двигатель ИД-40К |
| Привод вентилятора обдува и компрессора | Привод компрессора | |
| Параметры питающей сети блока управления: - напряжение, В - частота, Гц - количество фаз | 400 50 1 | |
| Габариты блока управления не более, мм | 600 х 300 х 250 | 750 х 400 х 400 |
| Мощность блока управления, кВт | 45 | 60 |
| Степень защиты блока управления по ГОСТ 14254-96 | IP52 | IP52 |
| Рабочий диапазон питающего напряжения блока управления, В | 300…500 | 300…500 |
| Номинальная частота вращения двигателя, об/мин | 1500 | 3000 |
| Необходимая мощность двигателя, кВт | 40 | 53 |
| Крутящий момент на валу двигателя, Н*м | 254 | 168 |
| Вращение вала двигателя. | Реверсивное | По часовой стрелке |
| Количество зубцов статора (катушек), шт. | 18 | 18 |
| Количество фаз | 3 | 3 |
| Количество катушек на фазу, шт. | 6 (соединение последовательное) | 6 (соединение последовательно-параллельное) |
| Количество выводных концов, шт. | 6 | 6 |
| Количество зубцов ротора, шт. | 12 | 12 |
| Режим работы по ГОСТ 183-74 | S1 (продолжительный) | S1 (продолжительный) |
| Способ пуска | плавный | плавный |
| Степень защиты по ГОСТ 17494-87 | IP21 | IP21 |
| Способ монтажа по ГОСТ 2479-79 | IM1001 | IM1001 |
Рис. - а) – индукторный двигатель ИД-40. б) – силовой блок управления.
В целях экономии электроэнергии в блоках управления двигателем предусмотрена обратная связь в функции скорости вращения вала двигателя. Датчиками, воздействия на обратную связь, предусмотрены контроль за температурой нагрева охлаждаемого объекта, за давлением в пневмосистеме. Тип применяемых датчиков согласовывается с Заказчиком.
В блоке управления предусмотрена клеммная коробка для подключения и передачи основных данных работы БУ и ИД-40 на пульт управления агрегатами.
Блок управления имеет защиты:
Компания "Аксиома Света" дата основания 2009 год.
Электронная почта:[email protected]
www.axiomasveta.com
Cтраница 1
Индукторные двигатели выполняются с неравным числом зубцов ( полюсов) на статоре Zc и роторе ZP. Реверсивные двигатели должны иметь не менее трех фаз. [1]
Индукторные двигатели выполняют двух -, трех - и однофазными. На обмотку возбуждения подается выпрямленное напряжение или используется схема на рис. 4.88. В индукторных двигателях применяются и постоянные магниты. [3]
Простой и надежный индукторный двигатель - основа такого электропривода - известен давно, но активное его использование началось именно сейчас благодаря успехам в области микропроцессорной техники и силовой электроники. [5]
Индукторными двигателями называются электрические машины с зубчатым безобмоточным ротором. У этих машин все обмотки ( первичные и вторичные) располагаются на статоре, электромагнитная связь между обмотками статора осуществляется за счет изменения магнитной проводимости воздушного зазора при вращении зубчатого ротора. В настоящее время предложено большое число различных модификаций индукторных асинхронных двигателей. В пазах статора рас-полагаются многофазные первич-ные и вторичные обмотки с числами пар полюсов PI и р2; для устранения трансформаторной связи между обмотками по первой гармонике НС числа пар полюсов обмоток выбираются из условий р 2kpz и р2 2kplt где k - целое число. [7]
Чаще всего индукторные двигатели двойного питания выполняются без каких-либо обмоток на роторе. [8]
В однофазных индукторных двигателях применяются все способы пуска, рассмотренные для обычных однофазных синхронных двигателей. [9]
Обмотки статора индукторного двигателя создают не вращающиеся, как в обычных двигателях переменного тока, а пульсирующие однополярные потоки фаз, дискретно сдвинутые в воздушном зазоре. Угловая скорость вращения ротора не равна, а кратна угловой скорости перемещения фазных потоков в зазоре. При Zc ZP эти скорости даже встречны. [10]
Принцип действия реактивного индукторного двигателя можно рассмотреть на примере схемы трехфазной индукторной машины ( рис. 7.10), полагая, что ее обмотка возбуждения разомкнута. В исходный момент времени ось магнитного потока совпадает с осью полюсов 2 - 2, и ротор расположен так, что магнитное сопротивление для потока, замыкающегося по этой оси, является минимальным. [12]
Если из исходного состояния индукторного двигателя ( полюса 1 - 1 статора и ротора совпадают, по обмотке 1 - 1 течет ток) внешним механическим усилием поворачивать ротор, а ток в обмотке сохранить, то двигатель будет оказывать сопротивление движению вала ротора, т.е. перейдет в тормозной режим. Диаграмма фазных токов двигателя для этого режима оказывается сдвинутой в направлении вращения ротора. [14]
Отметим, что для низкоскоростных синхронных индукторных двигателей с осевым возбуждением переменные составляющие самоиндуктивности и взаимоиндуктивности весьма малы и ими без большой погрешности для практических расчетов можно пренебречь. [15]
Страницы: 1 2 3 4 5
www.ngpedia.ru
Cтраница 4
Электромеханическая часть вентильных двигателей постоянного тока, как правило, аналогична известным конструктивным модификациям синхронных машин. Для маломощных приводов используются двигатели с постоянными магнитами, а также гистерезисные, реактивные и индукторные двигатели. В приводах средней и большой мощности используются двигатели с электромагнитным возбуждением. [46]
Индукторные двигатели выполняют двух -, трех - и однофазными. На обмотку возбуждения подается выпрямленное напряжение или используется схема на рис. 4.88. В индукторных двигателях применяются и постоянные магниты. [47]
Механизм возникновения электромагнитного момента, обусловленного взаимодействием переменных составляющих потокосцепления магнита и фаз с фазными токами, оказывается таким же, как и в двигателях с активных ротором. Количественное различие состоит в том, что потокосцепление возбужденного ротора с фазными обмотками статора у активных ШД не содержит постоянной составляющей, а у индукторных двигателей постоянная составляющая потокосцепления контура возбуждения с любой из фаз непременно присутствует, и ее величина зависит от геометрии и степени насыщения зубцового слоя. [48]
Наличие на валу двигателя реактивного момента практически не влияет на критическую частоту, что иллюстрируется осциллограммами на рис. 9 - 11 а, полученными при моделировании уравнений для четырехтактного индукторного двигателя. При значительном моменте нагрузки ( осциллогоамма 4 предельная рабочая скорость оказывается ниже границы возникновения самораскачивания. Введение внешнего демпфирования типа вязкого трения позволяет увеличить критическую скорость и расширить диапазон рабочих частот привода. [50]
В электрооборудовании различных устройств для плавного перемещения или поворота различных рабочих органов широко используются регулируемые и нерегулируемые по скорости вращения тихоходные асинхронные электродвигатели. Применение последних особенно желательно там, где требуется обеспечить уверенный пуск и регулирование скорости вращения ротора в широких пределах без применения специальных регулировочных устройств. Асинхронные индукторные двигатели обеспечивают большие пусковые моменты и хорошие динамические характеристики при весьма низких скоростях вращения и поэтому могут найти применение в различных позиционных следящих системах и в качестве моментных двигателей. [51]
По конструктивному исполнению и принципу работы рассматриваемые двигатели сходны с редукторными двигателями, имеющими радиальное возбуждение. Возбуждение может создаваться обмоткой постоянного тока или постоянным магнитом, находящимся на статоре, как и в редукторных двигателях. Однако в шаговых индукторных двигателях постоянная составляющая магнитного поля обычно образуется за счет особого способа включения обмоток якоря. Например, если питать фазы обмотки якоря однополярными импульсами, то за счет постоянной составляющей тока в машине возникает неподвижное в пространстве магнитное поле, намагничивающее ротор. Следовательно, при соответствующей схеме питания обмоток возбуждения реактивный шаговый двигатель может работать как двигатель с подмагничиванием. [52]
По конструктивному исполнению и принципу работы рассматриваемые двигатели сходны с редукторными двигателями, имеющими радиальное возбуждение. Возбуждение может создаваться обмоткой постоянного тока или постоянным магнитом, находящимся на статоре, как и в редукторных двигателях. Однако в шаговых индукторных двигателях постоянная составляющая магнитного поля чаще всего образуется за счет особого способа включения обмоток якоря. Например, если питать фазы обмотки якоря однополярными импульсами, то за счет постоянной составляющей тока в машине возникает неподвижное в пространстве магнитное поле, намагничивающее ротор. Следовательно, при соответствующей схеме питания обмоток возбуждения реактивный шаговый двигатель может работать как двигатель с подмагничиванием. [54]
Двухобмоточными назовем двигатели, которые имеют по две самостоятельные системы обмоток на статоре и роторе. Двух-обмоточные двигатели являются преимущественно специальными индукторными двигателями. Основными типами здесь являются индукторные двигатели двойного питания, асинхронные индукторные двигатели и синхронные двигатели с радиальным и осевым возбуждением. Первые три типа двигателей имеют одинаковую систему обмоток на статоре. Индукторные двигатели с осевым возбуждением отличаются от предыдущих особым расположением обмотки возбуждения и принципом установления электромагнитной связи с остальными обмотками. [55]
Изложенные примеры разработок синхронного генератора непосредственно применимы и к синхронным двигателям. Однако еще не было разработано двигателей мощностью порядка 50 кВт, и до сих пор наибольшее число случаев использования сверхпроводящих двигателей приходится на очень малые мощности. Простой разновидностью сверхпроводящего двигателя является синхронный индукторный двигатель. [56]
Это название получили индукторные синхронные машины, предназначенные для работы в режиме двигателя и позволяющие получить весьма малые частоты вращения без использования механических редукторов. Поскольку терминология в этой области еще не сложилась, их называют также редукторными синхронными двигателями, синхронными двигателями с электромагнитной редукцией частоты вращения или субсинхронными. Несмотря на то что по своему устройству эти двигатели в принципе ничем не отличаются от синхронных индукторных генераторов соответствующих модификаций, они нашли практическое применение много позже и получили заметное распространение лишь в 60 - 70 - х годах. Синхронная частота вращения индукторных двигателей при заданной частоте питания / зависит только от числа зубцов Z магнитопровода ротора п 0 / 2л f / Z. [57]
Это название получили индукторные синхронные машины, предназначенные для работы в режиме двигателя и позволяющие: получить весьма малые частоты вращения без использования механических редукторов. Поскольку терминология в этой области еще не сложилась, их называют также редукторными синхронными двигателями, синхронными двигателями с электромагнитной редукцией частоты вращения или субсинхронными. Несмотря на то что по своему устройству эти двигатели в принципе ничем не отличаются от синхронных индукторных генераторов соответствующих модификаций, они нашли практическое применение много позже и получили заметное распространение лишь в 60 - 70 - х годах. Синхронная частота вращения индукторных двигателей при заданной частоте питания / зависит только от числа зубцов Z магнитопроводг ротора п 0 / 2л / / Z. [58]
Двигатели этого типа просты в изготовлении, технологичны и дешевы. Они имеют пассивный ферромагнитный ротор без каких-либо обмоток или магнитов. Вместе с тем высокие потребительские свойства таких приводов могут быть обеспечены только при применении мощной микропроцессорной системы управления в сочетании с современной силовой электроникой. Для типовых приводов перспективны индукторные двигатели с самовозбуждением, а для тяговых приводов - индукторные двигатели с независимым возбуждением со стороны статора. В последнем случае система управления строится как система двухзонного регулирования скорости по аналогии с коллекторными приводами постоянного тока. [59]
Двухобмоточными назовем двигатели, которые имеют по две самостоятельные системы обмоток на статоре и роторе. Двух-обмоточные двигатели являются преимущественно специальными индукторными двигателями. Основными типами здесь являются индукторные двигатели двойного питания, асинхронные индукторные двигатели и синхронные двигатели с радиальным и осевым возбуждением. Первые три типа двигателей имеют одинаковую систему обмоток на статоре. Индукторные двигатели с осевым возбуждением отличаются от предыдущих особым расположением обмотки возбуждения и принципом установления электромагнитной связи с остальными обмотками. [60]
Страницы: 1 2 3 4 5
www.ngpedia.ru

Вентильно-индукторный двигатель ДВИ применяется в составе вентильно-индукторного привода с системой управления частоты вращения при проведении испытаний систем гидроагрегатов, насосов и узлов мощностью от 5 до 500кВт с помощью изменения частоты вращения двигателя в диапазоне от 300 до 3000об/мин.
Двигатель имеет реверсивное направление вращения.Вид климатического исполнения электродвигателя У3.Конструктивное исполнение по способу монтажа IМ1002.Режим работы продолжительный S1.Степень защиты IP54.Охлаждение ICA 0141.
По желанию заказчика двигатель изготавливается во взрывобезопасном исполнении. Изоляция обмоток класса нагревостойкости F (термореактивная, влагостойкая). В двигатель встроены датчики термоконтроля, которые измеряют температуры обмоток якоря, подшипников и возбуждения.
Система электропривода осуществляет продолжительный режим работы с заданной частотой и номинальным моментом, а также плавное регулирование частоты вращения в заданных пределах при моменте сопротивления на валу двигателя, который не превышает номинальный момент.
В составе электропривода находится блок авто-управления - Универсал 500 ВИ, скомпонованный из трех модулей - Универсал 160 В. Универсал 500 ВИ имеет специальное программное обеспечение и датчики для управления двигателем.
Двигатели ДВИ применяются для автоматизированных регулируемых электроприводов в станкостроении, тяговых электродвигателей транспортных средств, высокооборотных электроприводов насосов, а так же компрессоров для нефтяной и газовой промышленности. В основные преимущества электродвигателей перед аналогами входят:- простота конструкции электродвигателя;- высокая надежность изделия;- плавное, бесконтактное, регулирование частоты вращения (двухзонное) в широких пределахи постоянстве вращающего момента;- высокие показатели динамических характеристик;- минимальные пульсации вращающего момента;- небольшой объем технического обслуживания в период эксплуатации;- снижение массы и габаритов двигателя.
(ДВИ) двигатель вентильно-индукторный, (500) мощность кВт, (3000) частота вращения об/мин, (У3) вид климатического исполнения.
|
Типоразмер |
Мощность, кВт/кВА |
Напряжение, В |
Частота вращения, об/мин |
КПД, % |
Масса, кг |
|
500/3000 -УЗ |
500 |
380 |
3000 |
96 |
2400 |


Многолетний опыт работы на рынке электротехнического оборудования, сотрудничество с заводами-изготовителями, а также наличие продукции на наших складах, позволяет осуществлять покупку и доставку электрооборудования и комплектующих в кратчайшие сроки. Специалисты компании «СпецЭлектро» помогут найти оптимальное решение по техническим характеристикам, цене и времени доставки электродвигателя или оборудования для Вашей задачи. Наши специалисты подберут замену для устаревшей серии оборудования и ответят на все интересующие Вас вопросы, помогут купить электродвигатель и подходящее вам оборудование.
se33.ru
Изобретение относится к области электромашиностроения и может быть использовано в качестве электродвигателя автономных объектов.
Известен индукторный двигатель (патент РФ №2237338 С2, H02K 19/06, H02K 1/06, 27.09.2004), содержащий статор, состоящий из закрепленных в корпусе ферромагнитных шихтованных полюсов, охваченных в радиальном направлении катушками фазной обмотки, при этом крайние полюса статора со стороны каждого торца двигателя объединены магнитопроводами для замыкания рабочего магнитного потока. Ротор двигателя выполнен в виде расположенных поперек оси вращения ряда дисков с установленными на них шихтованными ферромагнитными полюсами. С обеих сторон торцевых поверхностей полюсов ротора через воздушные зазоры размещены полюса статора. Количество дисков ротора определяется требуемой мощностью двигателя и его осевым габаритом. При работе двигателя на катушки каждой фазы поочередно подаются управляемые импульсы тока от автономного коммутатора, в результате чего образуется рабочий магнитный поток, который проходит через полюса ротора, статора, воздушные зазоры, и замыкается на магнитопроводах статора со стороны каждого торца двигателя. Вредные поперечные магнитные силы действуют только между крайними полюсами статора, закрепленными на корпусе двигателя, а между внутренними полюсами ротора и статора эти силы отсутствуют, что обеспечивает достижение указанного выше технического результата.
Недостатками данного двигателя являются высокие массогабаритные показатели и ограниченные функциональные возможности, обусловленные использованием при преобразовании энергии только электромагнитных сил, создаваемых по краям полюсов, и неиспользованием электромагнитных сил, создаваемых центральной частью полюса, а также сложность конструкции.
Известен индукторный двигатель (заявка на выдачу патента РФ №2007148352 С, H02K 19/10, 10.07.2009), содержащий явнополюсный симметричный статор с 2m полюсами, на которых размещены 2m сосредоточенные обмотки, и ферромагнитный ротор с 2(m±1) полюсами, при этом дополнительно ротор имеет цилиндрическую форму, образованную путем клеевого заполнения всех областей ротора, расположенных внутри цилиндрической поверхности с радиусом, равным максимальному радиусу ротора, немагнитным изоляционным материалом, например компаундом.
Недостатками данного двигателя являются высокие массогабаритные показатели и ограниченные функциональные возможности, обусловленные использованием при преобразовании энергии только электромагнитных сил, создаваемых по краям полюсов, и неиспользованием электромагнитных сил, создаваемых центральной частью полюса, а также сложность конструкции.
Известна конструкция трехфазного индукторного двигателя (заявка на патент РФ №96111920 А, H02K 19/10, H02K 19/02, H02K 1/22, H02K 3/18, H02K 1/14, 27.10.1998), содержащая статор с шестью полюсами и размещенными на них фазными обмотками, зубчатый безобмоточный ротор, при этом ротор содержит шесть зубцов.
Недостатками данного двигателя являются высокие массогабаритные показатели и ограниченные функциональные возможности, обусловленные использованием при преобразовании энергии только электромагнитных сил, создаваемых по краям полюсов, и неиспользованием электромагнитных сил, создаваемых центральной частью полюса, а также сложность конструкции.
Известен индукторный двигатель (патент РФ №2068608 C1, H02K 1/12, H02K 19/06, 27.10.1996), состоящий из шихтованного зубчатого ротора и статора, содержащего в пазах шихтованного магнитопровода катушки обмотки. В пазах статора с катушками выполнены ферромагнитные выступы, разделяющие их на две части. В образовавшиеся пазы уложены стороны катушек, намотанных из проводящей шины на узкую сторону. Пазовая часть катушки, прилегающая к стенке паза и к воздушному зазору, подрезана. На стенках пазов статора с катушками и боковых поверхностях выступов выполнены углубления, в которые установлены пазовые клинья.
Недостатками данного двигателя являются высокие массогабаритные показатели и ограниченные функциональные возможности, обусловленные использованием при преобразовании энергии только электромагнитных сил, создаваемых по краям полюсов, и неиспользованием электромагнитных сил, создаваемых центральной частью полюса, а также сложность конструкции.
Наиболее близким к заявляемому по технической сущности и достигаемому результату является вентильно-индукторный реактивный двигатель (патент РФ №2159494 C1, H02K 19/06, H02K 1/06, 12.04.1999), состоящий из корпуса, в котором установлены индуктор и якорь, с возможностью относительного вращения или линейного перемещения, на индукторе и якоре располагаются зубцы и пазы, при этом катушки возбуждения размещаются в пазах индуктора и через управляемые вентильные ключи соединены с источником постоянного напряжения.
Недостатками данного двигателя являются высокие массогабаритные показатели и ограниченные функциональные возможности, обусловленные использованием при преобразовании энергии только электромагнитных сил, создаваемых по краям полюсов, и неиспользованием электромагнитных сил, создаваемых центральной частью полюса, а также сложность конструкции.
Задача изобретения - расширение функциональных возможностей вентильно-индукторного двигателя, благодаря возможности использования электромагнитных сил в центре полюса и введению реверса, упрощение технологии изготовления, благодаря выполнению равного количества зубцов индуктора и якоря, а также достижение максимальных энергетических показателей, благодаря использованию оптимальных геометрических соотношений зубцов якоря и индуктора.
Техническим результатом является повышение надежности, энергоэффективности и выходной мощности вентильно-индукторного двигателя.
Поставленная задача решается и указанный результат достигается тем, что в вентильно-индукторном двигателе, содержащем корпус, в котором установлены с возможностью относительного вращения индуктор и якорь, на индукторе и якоре расположены зубцы и пазы, при этом катушки возбуждения через управляемые вентильные ключи соединены с источником постоянного напряжения, согласно изобретению катушки возбуждения расположены в пазах якоря, при этом количество зубцов якоря равно количеству зубцов индуктора, в торцевой части установлено n правых электромагнитов и n левых электромагнитов, при этом отношение ширины зубца индуктора и якоря к зубцовому делению индуктора находится в промежутке 0,35-0,45, отношение ширины паза индуктора и якоря к зубцовому делению индуктора - в промежутке 0,55-0,65, а высота зубца индуктора и якоря равна 4 высотам воздушного зазора.
Предложенное устройство содержит (см. чертеж) корпус 1, в котором установлены с возможностью относительного вращения индуктор 2 и якорь 3, на индукторе 2 и якоре 3 расположенны зубцы 4 и пазы 5, катушки возбуждения 6, расположенные в пазах 5 якоря 3, через управляемые вентильные ключи 7 соединены с источником напряжения 8, n-правых электромагнитов 9 и n-левых электромагнитов 10, электрически соединенных с источником напряжения 8, установленных в торцевой поверхности якоря 3.
Предложенный вентильно-индукторный двигатель работает следующим образом: зубцы ротора выполнены таким образом, что отношение ширины зубца к зубцовому делению индуктора находится в промежутке 0,35-0,45, отношение ширины паза индуктора и якоря к зубцовому делению индуктора - в промежутке 0,55-0,65, а высота зубца индуктора и якоря равна 4 высотам воздушного зазора При этом зубцовое деление индуктора рассчитывается по формуле:

где z - число зубцов индуктора и якоря;
D - внешний диаметр ротора.
При данном соотношении ширины зубца к зубцовому делению имеют место максимальные силы, при этом для преобразования энергии используются не только края зубцов, но и центр.
При подаче электрического импульса от источника напряжения 8 через управляемые вентильные ключи 7 на n правых электромагнитов 9 n правых электромагнитов 9 втягивают зубцы индуктора 2 вправо, обеспечивая тем самым начальное смещение между зубцами индуктора 2 и якоря 3. При этом на катушки возбуждения 6, якоря 3 также подается импульс тока. При этом ток в катушках возбуждения 6 благодаря малой индуктивности быстро нарастает и создает магнитный поток, замыкающийся через рабочий зазор между индуктором 2 и якорем 3. Так как индуктор 2 и якорь 3 смещены друг относительно друга вправо, возникает сила магнитного тяжения (тяга), стремящаяся установить зубцы индуктора и якоря в согласованное положение. Благодаря тяге возникает правонаправленное вращение якоря 3 относительно индуктора 2. Как только достигается согласованное положение зубцов индуктора 2 и якоря 3, снова подается импульс на n правых электромагнитов 9.
Для обеспечения реверса вентильно-индукторного двигателя подается импульс от источника напряжения 8 через управляемые вентильные ключи 7, n левых электромагнитов 10, n левых электромагнитов 10 втягивают зубцы индуктора 2 влево, обеспечивая тем самым начальное смещение между зубцами индуктора 2 и якоря 3. При этом на катушки возбуждения 6 якоря 3 также подается импульс тока. Так как индуктор 2 и якорь 3 смещены друг относительно друга влево, возникает сила магнитного тяжения (тяга), стремящаяся установить зубцы индуктора и якоря в согласованное положение. Благодаря тяге возникает левонаправленое вращение якоря 3 относительно индуктора 2. Как только достигается согласованное положение зубцов индуктора 2 и якоря 3, снова подается импульс на n левых электромагнитов 10.
Итак, заявляемое изобретение позволяет расширить функциональные возможности вентильно-индукторного двигателя, благодаря возможности использования электромагнитных сил в центре полюса и введению реверса, упростить технологию изготовления, благодаря выполнению равного количества зубцов индуктора и якоря, а также достигнуть максимальные энергетические показатели, благодаря использованию оптимальных геометрических соотношений зубцов якоря и индуктора.
Таким образом, повышается надежность и энергоэффективность, а также выходная мощности вентильно-индукторного двигателя.
Вентильно-индукторный двигатель, содержащий корпус, в котором установлены с возможностью относительного вращения индуктор и якорь, на индукторе и якоре расположены зубцы и пазы, при этом катушки возбуждения через управляемые вентильные ключи соединены с источником постоянного напряжения, отличающийся тем, что катушки возбуждения расположены в пазах якоря, при этом количество зубцов якоря равно количеству зубцов индуктора, в торцевой части установлено n правых электромагнитов и n левых электромагнитов, при этом отношение ширины зубца индуктора и якоря к зубцовому делению индуктора находится в промежутке 0,35-0,45, отношение ширины паза индуктора и якоря к зубцовому делению индуктора - в промежутке 0,55-0,65, а высота зубца индуктора и якоря равна 4 высотам воздушного зазора.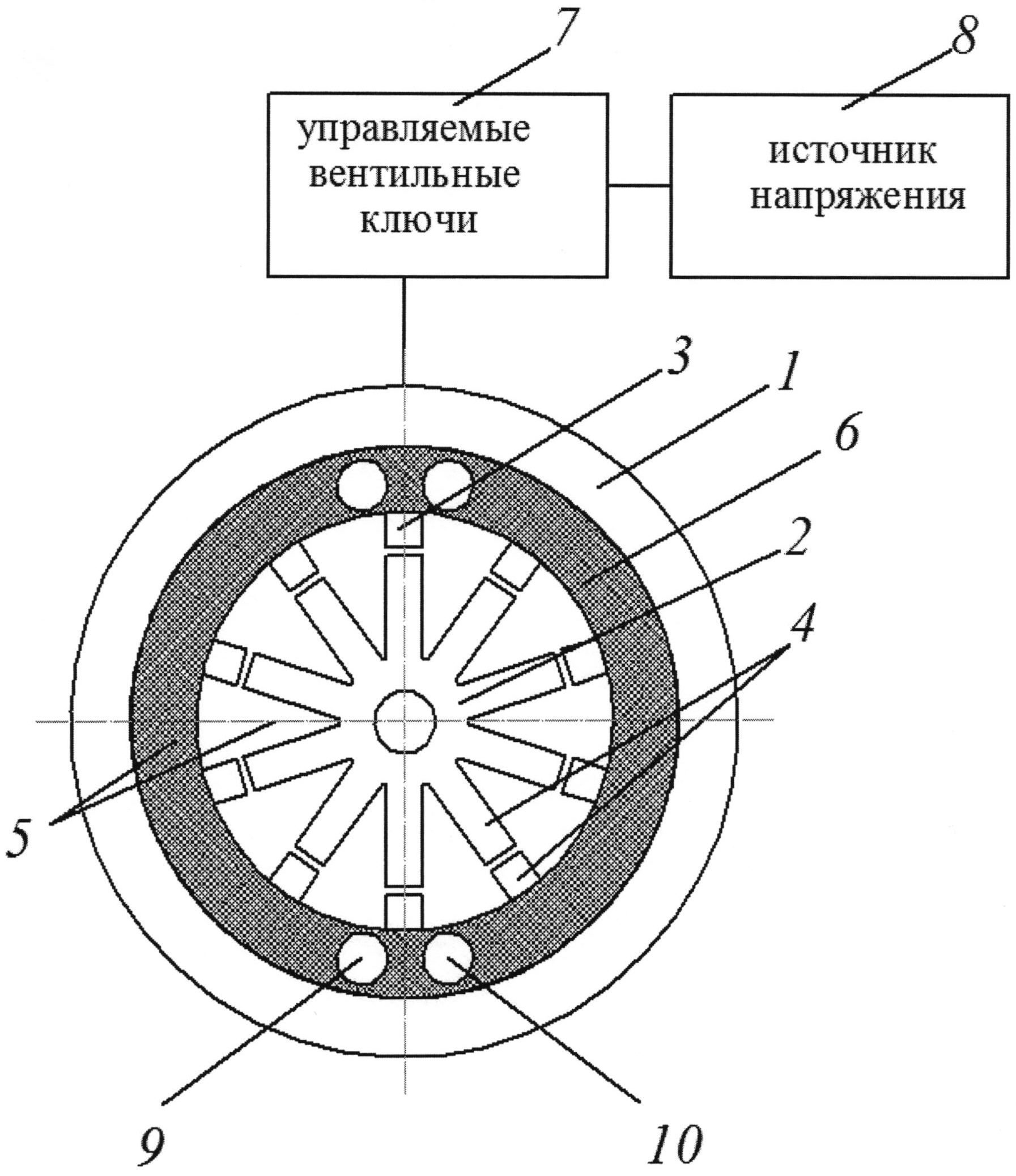
edrid.ru
Cтраница 2
Силовые цепи электроприводов с индукторными двигателями содержат меньшее число силовых вентилей, так как через обмотки статора пропускаются однополярные импульсы тока. [17]
Для уменьшения скорости вращения в синхронных индукторных двигателях необходимо увеличивать число зубцов Zr на роторе. Последнему ставит предел чрезмерное увеличение диаметра ротора Dar. Для иллюстрации на рис. 1 - 16 показана зависимость Dar ( f ( nrc) при зубцовом делении ротора tr 3 мм. Для обеспечения удовлетворительных условий пуска рациональный предел скорости вращения для синхронных индукторных микродвигателей находится в пределах 60 - 80 об / мин. [18]
Эти же формулы справедливы и для асинхронных индукторных двигателей с однофазной вторичной обмоткой. В этом случае, как и для двигателей двойного питания, уравнение ( 4 - 13) справедливо для вторичной обмотки статора, а под током if во всех уравнениях надо подразумевать ток г 52 вторичной обмотки. [19]
В последнее время начинают находить применение также индукторные двигатели, развивающие при питании током повышенной частоты умеренные скорости вращения. Их устройство аналогично устройству индукторных генераторов. [21]
В последнее время начинают находить применение также индукторные двигатели, развивающие при питании током повышенной частоты умеренные скорости вращения. Их устройство аналогично устройству индукторных генера - торов. [23]
Конструктивно эти двигатели ничем не отличаются от асинхронных индукторных двигателей. [24]
К безусловным проверенным практикой достоинствам электроприводов с индукторными двигателями следует отнести простую и технологичную конструкцию магнитопровода и фазных катушечных обмоток на статоре, компактный, прочный, не содержащий обмоток ротор, выдерживающий значительные перегрузки и скорость вращения, простую, надежную и сравнительно дешевую схему вентильного преобразователя, пониженный расход меди. Области применения таких электроприводов постоянно расширяются. [25]
Для получения весьма малых устойчивых скоростей вращения целесообразно использовать тихоходный индукторный двигатель двойного питания. Эти двигатели находят применение также в установках для снятия амплитудно-фазовых характеристик приборов, предназначенных для регистрации медленно протекающих процессов. [26]
На рис. 10 - 19 показан поперечный разрез конструкции четырех-фазного индукторного двигателя серии ШД-4. В корпусе / запрессован шихтованный пакет статора 2, имеющий восемь полюсных выступов с гребенчатыми зубцовыми зонами. Зубчатый ротор 3 также набран из листов электротехнической стали. [27]
Действительно, при однопериодной якорной обмотке ( рг 1) ротор такого индукторного двигателя имеет всего один зубец, так как согласно ( 20 - 12) Z4 pt 1, а эксцентрично смещенный цилиндрический ротор в отношении распределения магнитной проводимости вполне аналогичен однозубцовому ротору. За счет механической редукции его скорость понижается до указанного ранее значения. [28]
Из ранее произведенного анализа следует, что для обеспечения низких скоростей вращения ротора индукторного двигателя двойного питания Qre ( i - 2) / Z. Распределенные обмотки такой модели создают лишь основные гармоники и. Asl и Л52 имеют выражения: Fsl Fmsl X cos ascos ш t; FSZ msa cos ( Ps2 / Psi) as cos W2 - Здесь и в дальнейшем за основу принимаются электрические градусы, приведенные к координатной системе первичной обмотки. [29]
К этой группе машин относятся синхронные машины с униполярным ( осевым) возбуждением, асинхронные индукторные двигатели и индукторные машины двойного питания. [30]
Страницы: 1 2 3 4 5
www.ngpedia.ru
Изобретение относится к области электромашиностроения и может быть использовано в качестве электродвигателя автономных объектов. Техническим результатом является повышение надежности, энергоэффективности и выходной мощности вентильно-индукторного двигателя. Вентильно-индукторный двигатель содержит корпус, в котором установлены с возможностью относительного вращения индуктор и якорь. На индукторе и якоре расположены зубцы и пазы. Катушки возбуждения, расположенные в пазах якоря, через управляемые вентильные ключи соединены с источником постоянного напряжения. Количество зубцов якоря равно количеству зубцов индуктора. Дополнительно в торцевой части установлено n правых электромагнитов и n левых электромагнитов. При этом отношение ширины зубца индуктора и якоря к зубцовому делению индуктора находится в промежутке 0,35-0,45, отношение ширины паза индуктора и якоря к зубцовому делению индуктора - в промежутке 0,55-0,65, а высота зубца индуктора и якоря равна 4 высотам воздушного зазора. 1 ил. 

Изобретение относится к области электромашиностроения и может быть использовано в качестве электродвигателя автономных объектов.
Известен индукторный двигатель (патент РФ № 2237338 С2, H02K 19/06, H02K 1/06, 27.09.2004), содержащий статор, состоящий из закрепленных в корпусе ферромагнитных шихтованных полюсов, охваченных в радиальном направлении катушками фазной обмотки, при этом крайние полюса статора со стороны каждого торца двигателя объединены магнитопроводами для замыкания рабочего магнитного потока. Ротор двигателя выполнен в виде расположенных поперек оси вращения ряда дисков с установленными на них шихтованными ферромагнитными полюсами. С обеих сторон торцевых поверхностей полюсов ротора через воздушные зазоры размещены полюса статора. Количество дисков ротора определяется требуемой мощностью двигателя и его осевым габаритом. При работе двигателя на катушки каждой фазы поочередно подаются управляемые импульсы тока от автономного коммутатора, в результате чего образуется рабочий магнитный поток, который проходит через полюса ротора, статора, воздушные зазоры, и замыкается на магнитопроводах статора со стороны каждого торца двигателя. Вредные поперечные магнитные силы действуют только между крайними полюсами статора, закрепленными на корпусе двигателя, а между внутренними полюсами ротора и статора эти силы отсутствуют, что обеспечивает достижение указанного выше технического результата.
Недостатками данного двигателя являются высокие массогабаритные показатели и ограниченные функциональные возможности, обусловленные использованием при преобразовании энергии только электромагнитных сил, создаваемых по краям полюсов, и неиспользованием электромагнитных сил, создаваемых центральной частью полюса, а также сложность конструкции.
Известен индукторный двигатель (заявка на выдачу патента РФ № 2007148352 С, H02K 19/10, 10.07.2009), содержащий явнополюсный симметричный статор с 2m полюсами, на которых размещены 2m сосредоточенные обмотки, и ферромагнитный ротор с 2(m±1) полюсами, при этом дополнительно ротор имеет цилиндрическую форму, образованную путем клеевого заполнения всех областей ротора, расположенных внутри цилиндрической поверхности с радиусом, равным максимальному радиусу ротора, немагнитным изоляционным материалом, например компаундом.
Недостатками данного двигателя являются высокие массогабаритные показатели и ограниченные функциональные возможности, обусловленные использованием при преобразовании энергии только электромагнитных сил, создаваемых по краям полюсов, и неиспользованием электромагнитных сил, создаваемых центральной частью полюса, а также сложность конструкции.
Известна конструкция трехфазного индукторного двигателя (заявка на патент РФ № 96111920 А, H02K 19/10, H02K 19/02, H02K 1/22, H02K 3/18, H02K 1/14, 27.10.1998), содержащая статор с шестью полюсами и размещенными на них фазными обмотками, зубчатый безобмоточный ротор, при этом ротор содержит шесть зубцов.
Недостатками данного двигателя являются высокие массогабаритные показатели и ограниченные функциональные возможности, обусловленные использованием при преобразовании энергии только электромагнитных сил, создаваемых по краям полюсов, и неиспользованием электромагнитных сил, создаваемых центральной частью полюса, а также сложность конструкции.
Известен индукторный двигатель (патент РФ № 2068608 C1, H02K 1/12, H02K 19/06, 27.10.1996), состоящий из шихтованного зубчатого ротора и статора, содержащего в пазах шихтованного магнитопровода катушки обмотки. В пазах статора с катушками выполнены ферромагнитные выступы, разделяющие их на две части. В образовавшиеся пазы уложены стороны катушек, намотанных из проводящей шины на узкую сторону. Пазовая часть катушки, прилегающая к стенке паза и к воздушному зазору, подрезана. На стенках пазов статора с катушками и боковых поверхностях выступов выполнены углубления, в которые установлены пазовые клинья.
Недостатками данного двигателя являются высокие массогабаритные показатели и ограниченные функциональные возможности, обусловленные использованием при преобразовании энергии только электромагнитных сил, создаваемых по краям полюсов, и неиспользованием электромагнитных сил, создаваемых центральной частью полюса, а также сложность конструкции.
Наиболее близким к заявляемому по технической сущности и достигаемому результату является вентильно-индукторный реактивный двигатель (патент РФ № 2159494 C1, H02K 19/06, H02K 1/06, 12.04.1999), состоящий из корпуса, в котором установлены индуктор и якорь, с возможностью относительного вращения или линейного перемещения, на индукторе и якоре располагаются зубцы и пазы, при этом катушки возбуждения размещаются в пазах индуктора и через управляемые вентильные ключи соединены с источником постоянного напряжения.
Недостатками данного двигателя являются высокие массогабаритные показатели и ограниченные функциональные возможности, обусловленные использованием при преобразовании энергии только электромагнитных сил, создаваемых по краям полюсов, и неиспользованием электромагнитных сил, создаваемых центральной частью полюса, а также сложность конструкции.
Задача изобретения - расширение функциональных возможностей вентильно-индукторного двигателя, благодаря возможности использования электромагнитных сил в центре полюса и введению реверса, упрощение технологии изготовления, благодаря выполнению равного количества зубцов индуктора и якоря, а также достижение максимальных энергетических показателей, благодаря использованию оптимальных геометрических соотношений зубцов якоря и индуктора.
Техническим результатом является повышение надежности, энергоэффективности и выходной мощности вентильно-индукторного двигателя.
Поставленная задача решается и указанный результат достигается тем, что в вентильно-индукторном двигателе, содержащем корпус, в котором установлены с возможностью относительного вращения индуктор и якорь, на индукторе и якоре расположены зубцы и пазы, при этом катушки возбуждения через управляемые вентильные ключи соединены с источником постоянного напряжения, согласно изобретению катушки возбуждения расположены в пазах якоря, при этом количество зубцов якоря равно количеству зубцов индуктора, в торцевой части установлено n правых электромагнитов и n левых электромагнитов, при этом отношение ширины зубца индуктора и якоря к зубцовому делению индуктора находится в промежутке 0,35-0,45, отношение ширины паза индуктора и якоря к зубцовому делению индуктора - в промежутке 0,55-0,65, а высота зубца индуктора и якоря равна 4 высотам воздушного зазора.
Предложенное устройство содержит (см. чертеж) корпус 1, в котором установлены с возможностью относительного вращения индуктор 2 и якорь 3, на индукторе 2 и якоре 3 расположенны зубцы 4 и пазы 5, катушки возбуждения 6, расположенные в пазах 5 якоря 3, через управляемые вентильные ключи 7 соединены с источником напряжения 8, n-правых электромагнитов 9 и n-левых электромагнитов 10, электрически соединенных с источником напряжения 8, установленных в торцевой поверхности якоря 3.
Предложенный вентильно-индукторный двигатель работает следующим образом: зубцы ротора выполнены таким образом, что отношение ширины зубца к зубцовому делению индуктора находится в промежутке 0,35-0,45, отношение ширины паза индуктора и якоря к зубцовому делению индуктора - в промежутке 0,55-0,65, а высота зубца индуктора и якоря равна 4 высотам воздушного зазора При этом зубцовое деление индуктора рассчитывается по формуле:

где z - число зубцов индуктора и якоря;
D - внешний диаметр ротора.
При данном соотношении ширины зубца к зубцовому делению имеют место максимальные силы, при этом для преобразования энергии используются не только края зубцов, но и центр.
При подаче электрического импульса от источника напряжения 8 через управляемые вентильные ключи 7 на n правых электромагнитов 9 n правых электромагнитов 9 втягивают зубцы индуктора 2 вправо, обеспечивая тем самым начальное смещение между зубцами индуктора 2 и якоря 3. При этом на катушки возбуждения 6, якоря 3 также подается импульс тока. При этом ток в катушках возбуждения 6 благодаря малой индуктивности быстро нарастает и создает магнитный поток, замыкающийся через рабочий зазор между индуктором 2 и якорем 3. Так как индуктор 2 и якорь 3 смещены друг относительно друга вправо, возникает сила магнитного тяжения (тяга), стремящаяся установить зубцы индуктора и якоря в согласованное положение. Благодаря тяге возникает правонаправленное вращение якоря 3 относительно индуктора 2. Как только достигается согласованное положение зубцов индуктора 2 и якоря 3, снова подается импульс на n правых электромагнитов 9.
Для обеспечения реверса вентильно-индукторного двигателя подается импульс от источника напряжения 8 через управляемые вентильные ключи 7, n левых электромагнитов 10, n левых электромагнитов 10 втягивают зубцы индуктора 2 влево, обеспечивая тем самым начальное смещение между зубцами индуктора 2 и якоря 3. При этом на катушки возбуждения 6 якоря 3 также подается импульс тока. Так как индуктор 2 и якорь 3 смещены друг относительно друга влево, возникает сила магнитного тяжения (тяга), стремящаяся установить зубцы индуктора и якоря в согласованное положение. Благодаря тяге возникает левонаправленое вращение якоря 3 относительно индуктора 2. Как только достигается согласованное положение зубцов индуктора 2 и якоря 3, снова подается импульс на n левых электромагнитов 10.
Итак, заявляемое изобретение позволяет расширить функциональные возможности вентильно-индукторного двигателя, благодаря возможности использования электромагнитных сил в центре полюса и введению реверса, упростить технологию изготовления, благодаря выполнению равного количества зубцов индуктора и якоря, а также достигнуть максимальные энергетические показатели, благодаря использованию оптимальных геометрических соотношений зубцов якоря и индуктора.
Таким образом, повышается надежность и энергоэффективность, а также выходная мощности вентильно-индукторного двигателя.
Вентильно-индукторный двигатель, содержащий корпус, в котором установлены с возможностью относительного вращения индуктор и якорь, на индукторе и якоре расположены зубцы и пазы, при этом катушки возбуждения через управляемые вентильные ключи соединены с источником постоянного напряжения, отличающийся тем, что катушки возбуждения расположены в пазах якоря, при этом количество зубцов якоря равно количеству зубцов индуктора, в торцевой части установлено n правых электромагнитов и n левых электромагнитов, при этом отношение ширины зубца индуктора и якоря к зубцовому делению индуктора находится в промежутке 0,35-0,45, отношение ширины паза индуктора и якоря к зубцовому делению индуктора - в промежутке 0,55-0,65, а высота зубца индуктора и якоря равна 4 высотам воздушного зазора.
www.freepatent.ru