При нагрузке машины по проводникам обмотки протекает ток iа = Iа/2а (Iа — ток цепи якоря). При взаимодействии этого тока с магнитным полем возникает электромагнитная сила, которая для одного проводника обмотки равна:
fx= Bδx iа lδ
Будем считать, что индукция Bδxсохраняет своё значение по всей активной длине проводника. Сила fxсоздает момент
Mx= fx Da/2
Все N проводников обмотки якоря создадут электромагнитный момент
Так как длина lδ всех проводников одинакова и через них протекает один и тот же ток iато
 (2.5)
(2.5)
Если принять, как и ранее, что индукция во всех точках полюсного деления τ равна (рис. 2.1):
Вср=Ф/(τ lδ)=2pФ/(πDa lδ), (2.6)
то получим
 . (2.7)
. (2.7)
Подставляя (2.7) в (2.5), а также учитывая (2.6), в окончательном виде получаем
M=pN/(2πa) IаФ=с IаФ (2.8)
Из (2.8) следует, что электромагнитный момент машины постоянного тока будет пропорционален магнитному потоку и току якоря.
При неизменном направлении вращения якоря направление момента зависит от режима работы машины. При работе машины в генераторном режиме ЭДС, наводимая в обмотке якоря, будет больше, чем напряжение на выводах машины, поэтому ток в якорной цепи имеет такое же направление, что и ЭДС.
На рис. 2.3 показано направление ЭДС и тока в активных проводниках обмотки кольцевого якоря двухполюсного генератора. Для упрощения условно принято, что щётки скользят непосредственно по проводникам обмотки. Применяя правило левой руки, устанавливаем, что силы, действующие на проводники, и электромагнитный момент, ими созданный, направлены в сторону, противоположную вращению якоря, т. е. будут оказывать тормозящее действие. Для преодоления тормозящего действия электромагнитного момента генератора, нужно увеличить момент и мощность двигателя, которым приводится во вращение якорь генератора.
В двигательном режиме работы машины приложенное к обмотке якоря напряжение сети будет больше, чем ЭДС обмотки якоря. Вследствие этого ток в цепи якоря изменит свое направление и будет направлен навстречу ЭДС (рис. 2.4). С изменением направления тока изменится направление момента. Он будет действовать в сторону вращения якоря, т. е. будет движущим.
Рис. 2.3. Направление момента в генераторном режиме
Рис. 2.4. Направление момента в двигательном режиме
РЕАКЦИЯ ЯКОРЯ
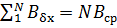
При холостом ходе, когда ток якоря близок к нулю, в двигателе действует только МДС обмотки возбуждения Fв, которая создает магнитное поле, симметрично распределенное относительно оси полюсов. График распределения магнитной индукции в зазоре Вδпредставляет собой трапецеидальную кривую (рис. 3.1).
Рис. 3.1. Картина магнитного поля и распределения индукции при холостом ходе машины
Если по обмотке якоря проходит ток, то появится МДС якоря Fа, вектор которой неподвижен и направлен перпендикулярно оси полюсов. МДС создает магнитное поле якоря (рис. 3.2). Если щетки двигателя расположены на геометрической нейтрали пп', то вектор МДС Fа, направлен по геометрической нейтрали, т. е. по поперечной оси двигателя.
На рис. 3.2 показан также график распределения магнитной индукции поля якоря в зазоре. При этом полагаем, что ток возбуждения равен нулю.
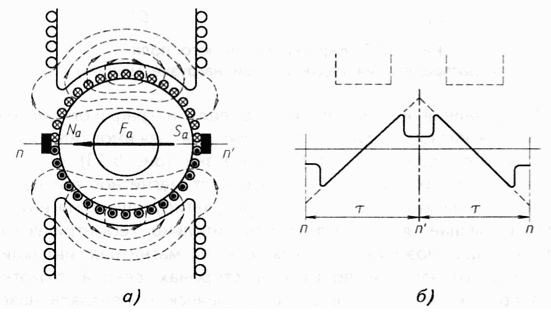
Рис. 3.2. Картина магнитного поля и распределения индукции якоря
Сердечник якоря намагничивается, и его участки, расположенные по геометрической нейтрали, приобретают полярность Na и Sa. Уменьшение магнитной индукции поля якоря по геометрической нейтрали (в точках п и n') объясняется резким увеличением воздушного зазора в межполюсном пространстве двигателя.
В реальных условиях работы с нагрузкой в машине одновременно действуют МДС Fв и Fа, которые создают результирующее поле, которое можно рассматривать как сумму двух магнитных полей.
Воздействие магнитного поля якоря на магнитное поле возбуждения называют реакцией якоря.
На рис. 3.3 показана картина результирующего магнитного поля и график распределения магнитной индукции поля в зазоре.
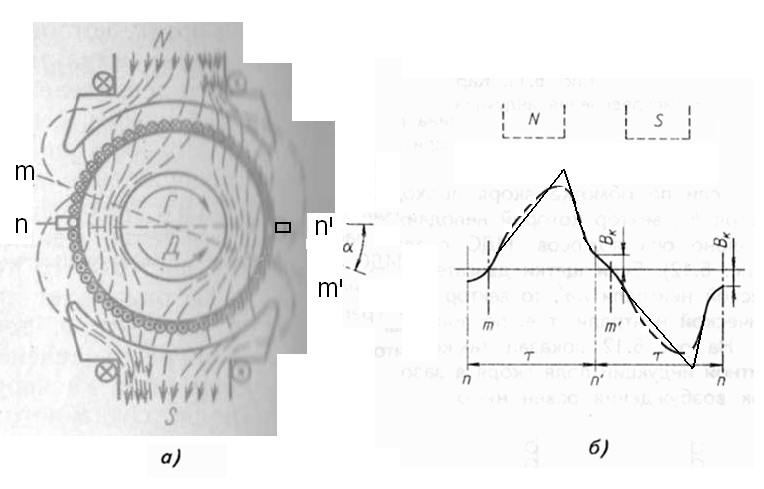
Рис. 3.3. Картина магнитного поля и распределения индукции при нагрузке машины
Из сравнения картин магнитного поля и графиков распределения магнитной индукции в зазоре для режимов идеального холостого хода (рис. 3.1) и нагрузки (рис. 3.3) можно сделать следующие выводы:
1) при нагрузке машины под влиянием поперечной реакции якоря происходит искажение магнитного поля. Под одним краем полюса оно ослабляется, а под другим усиливается. При работе машины в качестве генератора ослабление происходит на набегающем крае полюса, а усиление на сбегающем. В двигательном режиме картина обратная.
2) точки m и m', в которых кривая результирующего поля проходит через нуль, смещаются из геометрической нейтрали. Эти точки (m и m') определяют положение так называемой физической нейтрали. По отношению к геометрической нейтрали физическая нейтраль смещается в сторону вращения якоря при работе машины в качестве генератора и в противоположную сторону при работе как двигателя. Положение физической нейтрали меняется с изменением нагрузки. При холостом ходе физическая и геометрическая нейтрали совпадают.
3) в ненасыщенной машине поток сохранит то же значение, что и при холостом ходе.
Подавляющее большинство машин постоянного тока в той или иной мере насыщены, и в этом случае уже нельзя получить результирующее поле при нагрузке сложением составляющих полей. Более насыщенным будет участок магнитной цепи под частью полюса, где индукция больше. Поэтому результирующая индукция на этом участке меньше суммы индукций полей возбуждения и якоря. Под другой частью полюса из-за перераспределения индукция несколько возрастает. Картина результирующего поля в воздушном зазоре машины, имеющей насыщенную магнитную цепь, показана на рис. 3.3, б штриховой линией. Поток при нагрузке, пропорциональный площади, ограниченной штриховой кривой, всегда меньше потока при холостом ходе. В этом смысле говорят, что при нагрузке машины с насыщенной магнитной цепью поперечная реакция якоря оказывает размагничивающее действие.
Влияние реакции якоря на результирующий магнитный поток зависит также от положения щеток. Когда щетки находятся на геометрической нейтрали (рис. 3.2), МДС якоря Fа направлена по поперечной оси и в двигателе имеет место поперечная реакция якоря.
Рис. 3.4. Смещение щеток с геометрической нейтрали
Если щетки сместить с геометрической нейтрали по направлению вращения якоря в генераторном режиме, или против направления вращения в двигательном режиме, то размагничивающее действие реакции якоря усилится.
Это объясняется тем, что одновременно со смещением щеток на угол α изменяется направление МДС якоря Fа (рис. 3.4). При этом МДС якоря помимо поперечной составляющей Fаq = Fа cosα приобретает еще и продольную составляющую Fаd = Fа sinα, направленную по оси полюсов встречно МДС обмотки возбуждения Fв, что ведет к размагничиванию магнитной системы двигателя.
Если же щетки сместить в противоположном направлении, то продольная составляющая Fаd будет направлена согласно с МДС возбуждения Fв, что приведет к подмагничиванию двигателя.
Искажения картины магнитного поля в зазоре машины продольная реакция якоря не производит.
poznayka.org
 Электромагнитный момент – момент, возникающий на валу электродвигателя при протекании по его обмоткам электрического тока. В литературе встречаются синонимы этого термина: вращающий момент двигателя или крутящий момент электродвигателя. Так же часто попадаются вариации с более развернутой формулировкой: электромагнитный вращающий момент или электромагнитный крутящий момент.
Электромагнитный момент – момент, возникающий на валу электродвигателя при протекании по его обмоткам электрического тока. В литературе встречаются синонимы этого термина: вращающий момент двигателя или крутящий момент электродвигателя. Так же часто попадаются вариации с более развернутой формулировкой: электромагнитный вращающий момент или электромагнитный крутящий момент.
Это один из ключевых параметров теории, определяющий способность асинхронного двигателя вращать подсоединенную к его валу нагрузку в требуемых статических и динамических режимах. По этой причине при принятии решения об использовании двигателя для решения конкретной задачи важно принимать во внимание характер повидения электромагнитного момента. В самом общем случае электромагнитный момент на валу двигателя определяют по формуле: Мэм = (?Еф х Iф)/?2 Где: Мэм – электромагнитный момент;Еф - мгновенное значение э.д.с. фазы асинхронного двигателя;Iф - мгновенное значение тока фазы асинхронного двигателя;?2 - угловая частота вращения ротора;Еще статьи по теме:Анализ формулы для определения электромагнитного крутящего момента двигателя.Перечень формул для расчета электромагнитного вращающего момента двигателя.
В процессе изменения величины электромагнитного момента при работе электродвигателя выделяют ряд состояний, для которых введены собственные термины. К этим терминам относятся пусковой, номинальный и критический моменты, а так же тормозной момент. Первые три термина относятся к работе электрической машины в режиме двигателя, последний термин относится к работе в режиме торможения.
Что еще почитать про электромагнитный вращающий момент асинхронников:
Понятие пускового момента в теории асинхронных двигателей.
Что понимают под номинальным моментом асинхронной электрической машины?
На что влияет критический момент электродвигателя?
Режимы торможения асинхронного двигателя и тормозной момент.
| Следующая > |
www.i380.ru
Cтраница 1
Электромагнитный момент двигателя является переменным, а в отдельные промежутки времени - даже тормозным. Однако якорь двигателя вращается с равномерной частотой, так как он имеет сравнительно большой момент инерции. [1]
Электромагнитный момент двигателя, так же как электромагнитный момент генератора, создается в результате взаимодействия основного поля и тока в обмотке якоря и поэтому ничем, кроме знака, не отличается от момента генератора. [2]
Электромагнитный момент двигателя называется также вращающим моментом. [3]
Электромагнитный момент двигателя пропорционален электромагнитной мощности Рж Мш1, так как угловая частота вращения магнитного поля со1 постоянна. [4]
Электромагнитный момент двигателя является переменным, а в отдельные промежутки времени даже тормозным, однако якорь двигателя вращается с равномерной частотой, так как он имеет сравнительно большой момент инерции. [5]
Электромагнитный момент двигателя формируют, задавая амплитуду тока статора и величину скольжения. Сигнал, пропорциональный желаемой амплитуде тока статора, снимают с выхода регулятора скорости PC и подают на верхний вход генератора ГСК. [6]
Представим электромагнитный момент двигателя как сумму моментов первой и второй гармоник магнитного поля. [7]
Величина электромагнитного момента двигателя пропорциональна электромагнитной мощности Р9м М ( л1, так как угловая скорость вращения магнитного поля о постоянна. [8]
Величина электромагнитного момента двигателя пропорциональна электромагнитной мощности Рэм М &1, так как угловая скорость вращения магнитного поля постоянна. [9]
Величина электромагнитного момента двигателя пропорциональна электромагнитной мощности РЭмЛШь так как угловая скорость вращения магнитного поля QI постоянна. [10]
Задание на электромагнитный момент двигателя формируется выходным сигналом регулятора скорости PC, на входе которого сравниваются сигнал задания скорости ш с выхода ЗИ и сигнал, пропорциональный реальной скорости ш двигателя. [11]
Следовательно, электромагнитный момент двигателя в переходном процессе также будет отличаться от своего установившегося значения, определяемого по кривой с для соответствующей скорости. [13]
Следовательно, электромагнитный момент двигателя в переходном процессе также будет отличаться от своего установившегося значения, определяемого по кривой / для соответствующей угловой скорости. [14]
Формирование величины электромагнитного момента двигателя производится в следующей последовательности: сначала в узле задания фазных токов напряжение на выходе регулятора скорости UPC, поступающее на вход модулятора МД, преобразуется в систему трех напряжений Ц / з, UBS и L / сз, которые образуют симметричную трехфазную систему и соответствуют желаемым величинам фазных токов статора; затем в трех параллельно работающих контурах регулирования токов фаз статора происходит преобразование сигналов 1 / ЛЗ, L / вз и i / сз в мгновенные значения токов фаз статора / /, / й и / с и, наконец, самой электрической машиной MS производится преобразование сигналов 1А, 1В и / с в величину электромагнитного момента двигателя. [15]
Страницы: 1 2 3 4
www.ngpedia.ru
Cтраница 2
Механическая характеристика связывает электромагнитный момент двигателя, реализующийся в процессе электромеханического преобразования энергии, с угловой скоростью вала машины, которая определяется условиями движения механической части привода. Так как в системе электропривода приложенные к обмоткам двигателя напряжения иг являются управляющими воздействиями со стороны системы автоматического управления электроприводом, а электромагнитный момент в соответствии с ( 2 - 7а) и ( 2 - 9) зависит от этих воздействий, механическая характеристика двигателя определяет взаимодействие электрической и механической частей привода в электромеханической системе и является основным показателем статических и динамических свойств электропривода. [16]
Уравнения ЭДС и электромагнитный момент двигателя можно получить из уравнений ЭДС обобщенной машины, если сделать следующие допущения: 1) падение напряжения на переходах полупроводниковых приборов значительно меньше падения напряжения на статоре СД; 2) магнитная цепь машины не насыщена, и магнитный поток, создаваемый постоянными магнитами, неизменен; 3) влиянием реакции якоря и коммутационных токов на магнитный поток двигателя можно пренебречь. [17]
Во время разгона электромагнитный момент двигателя должен не только преодолеть момент нагрузки и момент холостого хода, но совершить еще работу по приданию необходимых ускорений вращающимся частям системы. [18]
Приведенным уравнением определяется электромагнитный момент двигателя. Момент на валу двигателя будет меньше электромагнитного момента на значение, соответствующее потерям в стали и механическим потерям. [19]
Приведенным уравнением определяется электромагнитный момент двигателя. [20]
Последнее уравнение выражает зависимость электромагнитного момента двигателя от скорости вращения при небольших напряжениях на управляющей обмотке с учетом параметров усилителя и при действии сигнала, содержащего прямую и квадратурную составляющие несущей частоты. [21]
При отключении электродвигателя от сети электромагнитный момент двигателя падает до нуля, однако вследствие инерции вращающихся частей агрегата частота вращения снижается постепенно. В самом начале режима противотока закрывается обратный клапан, насос снова переходит в насосный режим. [23]
Ниже рассматривается практический способ определения электромагнитного момента двигателя, если известен механический момент на его палу. При этом исходным параметром является мощность электродвигателя. Потери мощности в обмотках возбуждения и якоря машины считаются приблизительно равными, что действительно имеет место в режимах работы, близких к номинальному. [24]
Установившемуся статическому режиму соответствует равенство электромагнитного момента двигателя сумме всех приложенных к механической системе моментов сопротивления М - - Мс. В процессе работы электропривода его нагрузка может изменяться в значительных пределах, соответственно изменяется и момент двигателя. Информация о том, в какой степени изменения момента сказываются на изменениях скорости двигателя и наоборот, заключена в механической характеристике двигателя. [25]
В каком из пунктов вывода электромагнитного момента двигателя постоянного тока допущена ошибка. [26]
Из формулы (XI.42) следует, что электромагнитный момент двигателя определяется произведением масштаба моментов тм на отрезок Ав между точкой А окружности и линией электромагнитной мощности ( см. рис. XI. [28]
Точно так же изменяется во времени электромагнитный момент двигателя. Скорость якоря растет по ступенчатым экспонентам и в конце пуска достигает номинального значения, если пуск происходит при полной нагрузке. [29]
Рассмотрим сначала работу внутреннего контура регулирования электромагнитного момента двигателя при неизменной величине сигнала 1 / РС, поданного на вход модулятора МД. Предположим, что вал двигателя преднамеренно заторможен. Тогда ротор сельсина 2С неподвижен. Если теперь на вход модулятора МД подать постоянное напряжение ( например, с выхода регулятора PC), то на выходах демодуляторов установятся постоянные напряжения, а по обмоткам фаз статора двигателя будут протекать токи, создающие МДС якоря ( статора) машины. [30]
Страницы: 1 2 3 4
www.ngpedia.ru
Cтраница 3
Однако уравнение (6.24) представляет собой довольно сложную зависимость электромагнитного момента двигателя от его скольжения. [31]
Здесь MA, Мв и Мс - составляющие электромагнитного момента двигателя, обусловленные взаимодействием фазных токов Л, 6 и С статора с полем ротора; LAP, LBp, LCp - взаимные индуктивности обмоток А, В и С фаз статора с обмоткой ротора. [32]
В результате их взаимодействия е вращающимся магнитным полем создается электромагнитный момент двигателя. [34]
В результате их взаимодействия с вращающимся магнитным полем создается электромагнитный момент двигателя. [36]
Формула ( X.I 8, б) показывает, что электромагнитный момент двигателя уравновешивается моментами нагрузки, холостого хода и динамическим. Электромагнитный момент М в двигательном режиме является вращающим и всегда направлен в сторону вращения. [37]
Регуляторы косвенного действия в той или иной мере связаны с измерением электромагнитного момента двигателя. Момент, развиваемый двигателем моталки, идет на преодоление момента натяжения, момента деформации изгиба полосы при намотке рулона, динамического момента в переходных процессах и момента от потерь в системе электропривода. [39]
При составлении структурной схемы приходится считаться с тем, что уравнение электромагнитного момента двигателя М f ( Uc, / с) является нелинейным. [40]
В этом случае тангенциальные составляющие электромагнитных сил меняют направление и возникает вращающий электромагнитный момент двигателя. Таким образом, при переходе из генераторного режима в двигательный установившаяся скорость вращения машины не меняется, а меняется знак угла О между осями полей обмотки возбуждения ротора и якорной обмотки статора. Независимо от величины нагрузки полюсная система обмотки возбуждения ротора вращается синхронно с якорным полем статора. Отсюда и название машин - синхронные. [41]
В этом случае тангенциальные составляющие электромагнитных сил меняют направление и возникает вращающий электромагнитный момент двигателя. Таким образом, при переходе из генераторного режима в двигательный установившаяся скорость вращения машины не меняется, а меняется знак угла О между осями полей обмотки возбуждения ротора и якорной обмотки статора. Независимо от величины нагрузки полюсная система обмотки возбуждения ротора вращается синхронно с якорным полем статора. Отсюда и название машин - синхронные. Скорость вращения п ( ротора строго соответствует частоте сети / и числу пар полюсов р машины. [42]
Электроприводы переменного тока ( пятая глава) изложены с позиций векторного регулирования электромагнитного момента двигателя. [43]
Это создает корректирующий гистерезис-ный момент, направленный встречно по отношению к переменной составляющей электромагнитного момента двигателя. [45]
Страницы: 1 2 3 4
www.ngpedia.ru