





Как уже отмечалось, ЭДС, наведенная в обмотке вращающегося якоря генератора, пропорциональна магнитному потоку полюсов и частоте его вращения:

Магнитный поток в генераторе, как известно, создается током возбуждения Iв. Если вращать якорь c постоянной частотой n и непрерывно измерять выходную ЭДС Е, то можно построить график Е = f (Iв) (рис. 7.4.1).

Эта зависимость называется характеристикой холостого хода. Она строится для режима, когда генератор не имеет внешней нагрузки, т.е. работает вхолостую. Если подключить к генератору нагрузку, то напряжение на его зажимах будет меньше E на величину падения напряжения в цепи якоря:
Здесь: U - напряжение на зажимах; Е - ЭДС в режиме х.х.; IЯ - ток якоря; RЯ - сопротивление в цепи якоря. Падение напряжения в цепи якоря обычно не превышает 2-8 % ЭДС генератора. Уменьшение напряжения на выходе генератора связано с размагничиванием машины магнитным полем якоря, а также падением напряжения в его обмотках. В каждой машине постоянного тока имеет место взаимодействие между током якоря IЯ и магнитным потоком Ф. В результате на каждый проводник обмотки якоря действует электромагнитная сила:

где В - магнитная индукция, IЯ - ток в обмотке якоря, L - длина якоря. Направление действия этой силы определяется правилом левой руки. Подставим сюда среднее значение магнитной индукции ВСР и величину тока в каждом проводнике обмотки якоря I = IЯ / 2 а. Получим

Электромагнитный момент, действующий на якорь машины, при числе проводников обмотки N:

где -  величина, постоянная для данной машины; d - диаметр якоря; р - число пар полюсов; N - число проводников обмотки якоря; а - число пар параллельных ветвей. При работе машины в режиме генератора электромагнитный момент действует против вращения якоря, т.е. является тормозным. Для привода генератора требуется электродвигатель мощность, которого должна покрыть все потери в генераторе:
величина, постоянная для данной машины; d - диаметр якоря; р - число пар полюсов; N - число проводников обмотки якоря; а - число пар параллельных ветвей. При работе машины в режиме генератора электромагнитный момент действует против вращения якоря, т.е. является тормозным. Для привода генератора требуется электродвигатель мощность, которого должна покрыть все потери в генераторе:

где Р - полезная электрическая мощность генератора; ∆РЯ - потери в обмотке якоря; ∆РВ - потери в обмотке возбуждения; ∆РМ - потери на намагничивание машины; ∆РМЕХ - механические потери, связанные с трением вращающихся частей.
Коэффициент полезного действия генератора определяется отношением:

У современных генераторов постоянного тока коэффициент полезного действия составляет 90-92 %.
В соответствии с принципом обратимости машина постоянного тока может работать как в качестве генератора, так и в качестве двигателя. Уравнение ЭДС для двигателя составлено на основании 2-го закона Кирхгофа с учетом направления ЭДС:

откуда

Ток в цепи якоря:

В соответствии о формулой Еа = Се Ф n частота вращения определяется выражением:

Подставим значение Е из уравнения U = Е - IЯ RЯ, получим:

т.е. частота вращения двигателя прямо пропорциональна подведенному напряжению и обратно пропорциональна магнитному потоку возбуждения. Из этой формулы видно, что возможны пути регулирования частоты вращения двигателя постоянного тока: 1. Изменением напряжения сети U. Регулируя подаваемое напряжение Uсети можно менять частоту вращения. 2. Включением в цепь якоря добавочного сопротивлению (R'Я = RЯ + RДОБ). Изменяя сопротивление RДОБ, меняют частоту вращения. 3. Изменением магнитного потока Ф. Машины с постоянными магнитами не регулируются. Машины с электромагнитами позволяют регулировать поток Ф путем изменения тока возбуждения IB. На рис. 7.5.1. показана схема включения в сеть двигателя постоянного тока.

По закону электромагнитной индукции при прохождении тока по обмотке якоря происходит взаимодействие ее проводников с магнитным полем полюсов. На каждый проводник обмотки будет действовать электромагнитная сила Рэм = ВСРLI, пропорциональная магнитной индукции полюсов В, длине проводника L и току I, протекающему по проводнику. Направление действия этой силы определяется правилом правой руки. Не повторяя рассуждений, проведенных для генератора постоянного тока, запишем выражение для вращающего момента:
M=CMФ IЯ
где CM - коэффициент пропорциональности. Вращающий момент у двигателей с независимым и параллельным возбуждением с увеличением нагрузки может как расти, так и уменьшаться, поскольку с ростом потребляемого тока I и размагничивания полюсов, уменьшается магнитный поток Ф.

Двигатели с последовательным возбуждением имеют отличные от вышеприведенных двигателей характеристики. Из схемы, приведенной на рис. 7.2.1 в, видно, что магнитный поток в машине создается обмоткой возбуждения, включенной последовательно с обмоткой якоря. Следовательно, IB = IЯ и выражение для вращающего момента будет иметь вид:

Последняя формула показывает, что чем больше нагрузка на двигатель, тем большим будет вращающий момент. Это обстоятельство делает двигатель с последовательным возбуждением незаменимым на электротранспорте (трамвае, троллейбусе и т.д.). Реверсирование или изменение направления вращения двигателей постоянного тока может осуществляться изменением полярности тока либо в обмотке якоря, либо в обмотке возбуждения.
studfiles.net
Секретные материалы

Ни для кого не является секретом что в современных электродвигателях львиная доля энергии расходуется на преодоление так называемой противоЭДС, то есть просто выбрасывается в никуда.
Таким образом мы видим что:
Uд = Uп - Uг,
где Uп - напряжение подведенное к двигателю
Uг - напряжение выработанное двигателем при вращении ротора
Uд - напряжение которое необходимо подать чтоб двигатель вращался на номинальных оборотах
Чтобы увидеть наличие этой противоЭДС вспомним, как в двигателях постоянного тока осуществляется регулировка частоты вращения. Необходимо помнить что, двигатели постоянного тока разделяются по принципу возбуждения, - на двигатели с последовательным возбуждение, двигатели с параллельным возбуждением (независимым) и двигатели со смешанным возбуждением. Для начала рассмотрим двигатель с параллельным или независимым возбуждением. При номинальном напряжении на зажимах электродвигателя мы имеем номинальную частоту вращения якоря, теперь чтобы уменьшить частоту вращения двигателя нам необходимо снизить напряжение питания якоря, таким образом, уменьшая Uп ротора мы уменьшаем разницу между подводимым напряжением и наведенным в роторе Uг, в итоге напряжение Uд снижается и двигатель уменьшает обороты до номинальных на данном напряжении. Теперь чтобы увеличить частоту вращения ротора выше номинальных нам необходимо уменьшать ток возбуждения, т.е. снизить напряжение подаваемое на возбуждение электродвигателя. Таким образом мы уменьшаем Uг напряжение генерируемое в двигателе, в итоге двигательное напряжение Uд увеличивается и ротор набирает обороты до номинальных при данном двигательном напряжении. В двигателях постоянного тока с последовательным возбуждением протекают аналогичные процессы, поэтому их нельзя включать на холостом ходу, в виду того что при малых токах двигателя, наводится незначительный магнитный поток возбуждения, что приводит к вырабатыванию малой величины генераторного напряжения и соответственно увеличению двигательного напряжения и росту оборотов до величины ограниченной только сопротивлением трения в подшипниках.
Если же рассматривать двигатели переменного тока синхронного (асинхронного), то здесь все видно еще нагляднее.
Есть такое понятие как пусковой ток, это ток который протекает через обмотки двигателя в момент пуска, пока двигатель не наберет номинальные обороты, то есть это ток который протекает через двигатель в тот момент, когда ротор не вращается и соответственно генераторная ЭДС Uг у него равна «НУЛЮ», двигательное напряжение равно напряжению питания, ток ограничен только активным сопротивлением обмоток статора. Отсюда можно сделать вывод что для того чтоб по обмоткам двигателя протекал номинальный ток, необходимо приложить гораздо меньшее напряжение, при условии отсутствия противоЭДС.
Помня о том что было сказано выше начнем конструирование электродвигателя без так называемой генераторной ЭДС, которая наводиться в двигателе при его вращении.
Для начала, конечно же, вспомним самый простейший случай вращения рамки в магнитном поле.


Итак если вращать рамку в магнитном поле то по правилу правой руки в ней наводиться ЭДС, величина которой определяется по формуле:
Ея = vBlsinα = vBl
Где l – длина проводника
v – скорость движения проводника
B – величина магнитной индукции
при замыкании рамки на нагрузку по ней протекает ток.
Зайдем с другой стороны, если рамку с током поместить в магнитное поле, то по правилу


левой руки она начнет вращаться под действием силы:
Fэм = IBlsinα = IBl
Где l – длина проводника
I – ток рамки
B – величина магнитной индукции
Тогда получается замкнутый круг, если по рамке течет ток, она вращается, в тоже время, если рамка вращается в ней наводиться ЭДС, и вся проблема в том, что оба эти процесса протекают одновременно и встречно друг другу.

Есть ли способ как то обойти этот закон физики? Надо попробовать. Начнем с того что попробуем избавиться от наведения ЭДС в рамке, чтоб такое проделать с вращающейся рамкой необходимо что бы оба плеча рамки проходили мимо одинакового полюса.


Но тогда скажете вы и обе силы Fэм , будут направлены в одну сторону и соответственно общий момент на валу будет равен 0. Верно. Как быть?
Будем думать дальше. Вспомним все существующие на сегодняшний момент электродвигатели и сравним их принцип работы. Выясняется что обычный синхронный двигатель работает немного на другом принципе, а именно там вращающееся поле статора тянет за собой постоянное магнитное поле ротора, т.е. вращает обычный магнит. Тогда почему бы не попробовать просто намагничивать ротор, и тогда во внешнем магнитном поле ротор провернется на некоторый угол, с определенным моментом.

Теперь остается вопрос в том как все это совместить. Оказывается и эта проблема легко решаема. Если статор выполнить из шести полюсов а обмотку ротора распределить таким образом что бы каждая простейшая рамка обоими полуплечами одновременно находилась под одноименным полюсом мы получим как раз то что доктор прописал.



Таким образом получаем распределенную обмотку ротора и пропуская ток по обмоткам как показано на рисунке мы имеем необходимое нам намагничивание ротора.
Осталось только немного привести все в надлежащий вид и мы имеем конструкцию двигателя без противоЭДС.


Автор сего опуса Чибирев Алексей Вячеславович.
Дата публикации 11.02.2010г.
Дата изобретения 02.09.2009г.
Другой интересный материал: «Загоняем» асинхронный двигатель в резонанс
allpowr.su
В силу обратимости электрических машин принцип действия электрического двигателя можно рассмотреть по рис. 1.3, только к щеткам необходимо подвести напряжение сети.
На проводник с током, помещенный в магнитное поле действует выталкивающаяся сила, определяемая правилом левой руки (см. рис. 1.3)
 ,
,
Это действие можно проследить по рис. 1.6.
С правой стороны магнитные линии складываются (поле усиливается), с левой – наоборот, появляется сила F согласно правилу левой руки.
Если поместить рамку с током в магнитное поле, то появляется вращающий электромагнитный момент (рис. 1.7)
 .
.
Рамка повернется только до горизонтального положения. Чтобы направление вращения было в одну сторону, необходимо периодически менять направление тока.
|
|
|
| Рис. 1.6. Выталкивающая сила, действующая на проводник с током | Рис. 1.7 Вращающий момент, действующий на рамку с током |
В режиме двигателя коллектор превращает потребляемый из внешней цепи постоянный ток в переменный в обмотке якоря и работает таким образом в качестве механического инвертора.
Так как проводники все время пересекают магнитное поле, то в них наводится эдс, величина которой определяется равенством  и которая направлена встречно подводимому напряжению, поэтому эту эдс еще называют противоэлектродвижущей силой (противоэдс) в двигателе.
и которая направлена встречно подводимому напряжению, поэтому эту эдс еще называют противоэлектродвижущей силой (противоэдс) в двигателе.
Основное уравнение эдс и напряжения двигателя
 . (1.4)
. (1.4)
План лекции
2.1. Обмотки кольцевого якоря и их недостатки.
2.2. Якорные обмотки барабанного типа.
2.3. Простая петлевая обмотка.
2.4. Простая волновая обмотка.
На начальном этапе электромашиностроения использовался кольцевой якорь. Это полый цилиндр, по внешней и внутренней поверхности которого наматываются витки обмотки; каждый виток соединен с коллекторной пластиной.
Недостатки такого якоря:
а) плохое использование меди, ибо активной частью витка является та часть его, которая расположена на внешней поверхности якоря;
б) невозможно механизировать процесс намотки;
в) завышенные габариты (внутренние слои в несколько витков).
Якорные обмотки барабанного типа отличаются от кольцевого тем, что обе стороны одного витка располагаются на его внешней поверхности; увеличивается использование меди обмотки; механизируется процесс намотки.
Витки заготавливаются заранее на шаблонах, и обмотчик не обматывает якорь машины, а укладывает готовые элементы обмотки в пазы.
В витке индуцированные эдс должны действовать согласовано, а для этого активные стороны витка должны находиться под полюсами разной полярности. Необходимо чтобы ширина витка составляла
 ,
,
где – полюсное деление;
 .(2.1)
.(2.1)
Полюсное деление – это часть длины поверхности якоря, приходящаяся на один полюс (рис. 2.1).

Рис. 2.1. Секции барабанного якоря
Но лучше чтобы  (экономия меди).
(экономия меди).
Коэффициент полюсного перекрытия
 , (2.2)
, (2.2)
 ,
,
где bp – ширина полюсного наконечника.
Нельзя чтобы наконечники полюсов соприкасались.
Секция обмотки – часть обмотки, находящаяся между двумя следующими друг за другом при обходе обмотки коллекторными пластинами. Секция может состоять из одного витка и множества витков.
Обмотки барабанного типа в основном – двухслойные. В пазу может располагаться несколько активных сторон секций (рис. 2.2). Одна сторона секции располагается в верхней части, другая – в нижней части другого паза (двухслойная обмотка). Здесь обмотки расположены в два слоя, но в одном реальном пазу (рис. 2.2, в) располагаются три элементарных паза (1Z= 3Zэ)
 , (2.3)
, (2.3)
где u – количество элементарных пазов в одном реальном.
Элементарный паз включает одну верхнюю и одну нижнюю стороны секции.

Рис. 2.2. Пазы якоря, состоящие из элементарных пазов: а – одного; б – двух; в – трех
Если все стороны секции одного слоя переходят вместе из одного реального паза в другой, их объединяют общей изоляцией и называют катушкой обмотки.
Обмотки якорей подразделяются на петлевые и волновые (рис. 2.3). Существуют так же обмотки, которые представляют собой сочетание этих двух обмоток.

Рис. 2.3. Одновитковая секция: а – петлевой обмотки; б – волновой обмотки
Если число активных проводников обмотки N, то витков всегоN/2, а если в секциивитков, то число секций
 . (2.4)
. (2.4)
Число секций в машине должно быть равно числу коллекторных пластин К и числу элементарных пазов Zэ:
S=K=Zэ. (2.5)
studfiles.net
Когда я реализовал управление по датчикам Холла я еще не очень понимал, что происходит в двигателе дальше абстрактных трех обмоток и двух полюсов: почему 120 градусов и почему алгоритм управления именно такой.
Все встало на место, когда я начал разбираться в идее бездатчикового управления бесколлекторным двигателем — понимание процесса, происходящего в реальной железке, помогло разработать аппаратную часть и понять алгоритм управления.
Ниже я постараюсь расписать свой путь к пониманию принципа управления бесколлекторным двигателем постоянного тока.
 Для работы бесколлекторного двигателя необходимо чтобы постоянное магнитное поле ротора увлекалось за вращающемся электромагнитным полем статора, как и в обычном ДПТ.
Для работы бесколлекторного двигателя необходимо чтобы постоянное магнитное поле ротора увлекалось за вращающемся электромагнитным полем статора, как и в обычном ДПТ.
Вращение магнитного поля статора осуществляется коммутацией обмоток с помощью электронного блока управления. Конструкция бесколлекторного двигателя схожа с конструкцией синхронного двигателя, если подключить бесколлекторный двигатель в трехфазную сеть переменного тока, удовлетворяющую электрическим параметрам двигателя, он будет работать.
Определенная коммутация обмоток бесколлекторного двигателя позволяет управлять им от источника постоянного тока. Чтобы понять, как составить таблицу коммутаций бесколлекторного двигателя необходимо рассмотреть управление синхронной машиной переменного тока.
Синхронная машина Синхронная машина управляется от трехфазной сети переменного тока. Двигатель имеет 3 электрические обмотки, смещенные между собой на 120 электрических градусов.
Запустив трехфазный двигатель в генераторном режиме, постоянным магнитным полем будет наводиться ЭДС на каждую из обмоток двигателя, обмотки двигателя распределены равномерно, на каждую из фаз будет наводиться синусоидальное напряжение и данные сигналы будут смещены между собой на 1/3 периода (рисунок 1). Форма ЭДС меняется по синусоидальному закону, период синусоиды равен 2П(360), поскольку мы имеем дело с электрическими величинами (ЭДС, напряжение, ток) назовем это электрическими градусами и будем измерять период в них.
При подаче на двигатель трехфазного напряжения в каждый момент времени на каждой обмотке будет некое значение силы тока.
 Рисунок 1. Вид сигнала трехфазного источника переменного тока.
Рисунок 1. Вид сигнала трехфазного источника переменного тока.Каждая обмотка формирует вектор магнитного поля пропорциональный току на обмотке. Сложив 3 вектора можно получить результирующий вектор магнитного поля. Так как с течением времени ток на обмотках двигателя меняется по синусоидальному закону, меняется величина вектора магнитного поля каждой обмотки, а результирующий суммарный вектор меняет угол поворота, при этом величина данного вектора остается постоянной.
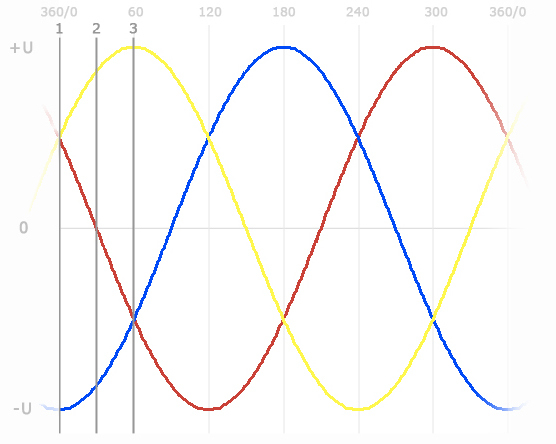 Рисунок 2. Один электрический период трехфазного двигателя.
Рисунок 2. Один электрический период трехфазного двигателя.На рисунке 2 изображен один электрический период трехфазного двигателя, на данном периоде обозначено 3 произвольных момента, чтобы построить в каждом из этих моментов вектора магнитного поля отложим данный период, 360 электрических градусов, на окружности. Разместим 3 обмотки двигателя сдвинутые на 120 электрических градусов относительно друг друга (рисунок 3).
 Рисунок 3. Момент 1. Вектора магнитного поля каждой обмотки (слева) и результирующий вектор магнитного поля (справа).
Рисунок 3. Момент 1. Вектора магнитного поля каждой обмотки (слева) и результирующий вектор магнитного поля (справа).Вдоль каждой из фаз построен вектор магнитного поля, создаваемый обмоткой двигателя. Направление вектора определяется направлением постоянного тока в обмотке, если напряжение, прикладываемое к обмотке положительно, то вектор направлен в противоположную сторону от обмотки, если отрицательное, то вдоль обмотки. Величина вектора пропорциональна величине напряжения на фазе в данный момент. Чтобы получить результирующий вектор магнитного поля необходимо сложить данные вектора по закону сложения векторов. Аналогично построение для второго и третьего моментов времени.
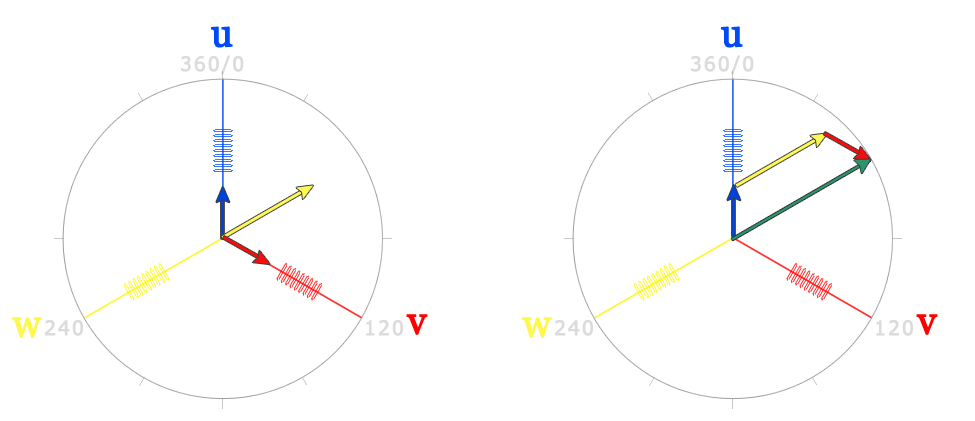 Рисунок 4. Момент 2. Вектора магнитного поля каждой обмотки (слева) и результирующий вектор магнитного поля (справа).
Рисунок 4. Момент 2. Вектора магнитного поля каждой обмотки (слева) и результирующий вектор магнитного поля (справа).Так, с течение времени, результирующий вектор плавно меняет свое направление, на рисунке 5 изображены получившиеся вектора и изображен полный поворот магнитного поля статора за один электрический период.
 Рисунок 5. Вид вращающегося магнитного поля формируемого обмотками на статоре двигателя.
Рисунок 5. Вид вращающегося магнитного поля формируемого обмотками на статоре двигателя.За этим вектором электрического магнитного поля увлекается магнитное поле постоянных магнитов ротора в каждый момент времени (рисунок 6).
 Рисунок 6. Постоянный магнит (ротор) следует направлению магнитного поля формируемого статором.
Рисунок 6. Постоянный магнит (ротор) следует направлению магнитного поля формируемого статором.Так работает синхронная машина переменного тока.
Имея источник постоянного тока необходимо самостоятельно формировать один электрический период со сменой направлений тока на трех обмотках двигателя. Поскольку бесколлекторный двигатель по конструкции такой же, как синхронный, в генераторном режиме имеет идентичные параметры, необходимо отталкиваться от рисунка 5, где изображено сформированное вращающееся магнитное поле.
Постоянное напряжение Источник постоянного тока имеет только 2 провода «плюс питания» и «минус питания» это значит, что есть возможность подавать напряжение только на две из трех обмоток. Необходимо аппроксимировать рисунок 5 и выделить все моменты, при которых возможно скоммутировать 2 фазы из трех.
Число перестановок из множества 3 равняется 6, следовательно, имеется 6 вариантов подключения обмоток. Изобразим возможные варианты коммутаций и выделим последовательность, при которой вектор будет шаг за шагом проворачиваться далее пока не дойдет до конца периода и не начнет сначала.
Электрический период будем отсчитывать от первого вектора.
 Рисунок 7. Вид шести векторов магнитного поля которые можно создать от источника постоянного тока коммутацией двух из трех обмоток.
Рисунок 7. Вид шести векторов магнитного поля которые можно создать от источника постоянного тока коммутацией двух из трех обмоток.На рисунке 5 видно, что при управлении трехфазным синусоидальным напряжением имеется множество векторов плавно проворачивающихся с течением времени, а при коммутации постоянным током возможно получить вращающееся поле только из 6 векторов, то есть переключение на следующий шаг должно происходить каждые 60 электрических градусов. Результаты из рисунка 7 сведены в таблицу 1.
Таблица 1. Полученная последовательность коммутаций обмоток двигателя.
| Плюс питания | Минус питания | Обмотка не подключена |
| W | U | V |
| W | V | U |
| U | V | W |
| U | W | V |
| V | W | U |
| V | U | W |
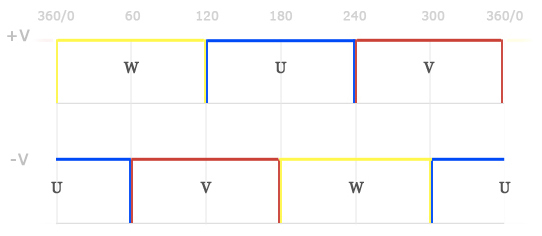 Рисунок 8. Вид управляющих сигналов от источника постоянного тока для бесколлекторного двигателя. Желтый – фаза W, синий – U, красный – V.
Рисунок 8. Вид управляющих сигналов от источника постоянного тока для бесколлекторного двигателя. Желтый – фаза W, синий – U, красный – V.Однако реальная картина с фаз двигателя будет похожа на синусоидальный сигнал из рисунка 1. У сигнала образуется трапециевидная форма, так как в моменты, когда обмотка двигателя не подключена, постоянные магниты ротора наводят на нее ЭДС (рисунок 9).
 Рисунок 9. Вид сигнала с обмоток бесколлекторного двигателя в рабочем режиме.
Рисунок 9. Вид сигнала с обмоток бесколлекторного двигателя в рабочем режиме.На осциллографе это выглядит так:
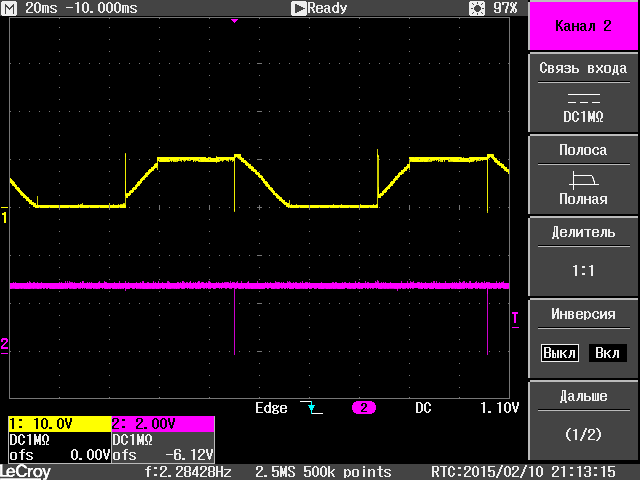 Рисунок 10. Вид окна осциллографа при измерении одной фазы двигателя.
Рисунок 10. Вид окна осциллографа при измерении одной фазы двигателя.Конструктивные особенности Как было сказано ранее за 6 переключений обмоток формируется один электрический период 360 электрических градусов. Необходимо связать данный период с реальным углом вращения ротора. Двигатели с одной парой полюсов и трехзубым статором применяются крайне редко, двигатели имеют N пар полюсов. На рисунке 11 изображены модели двигателя с одной парой полюсов и с двумя парами полюсов.
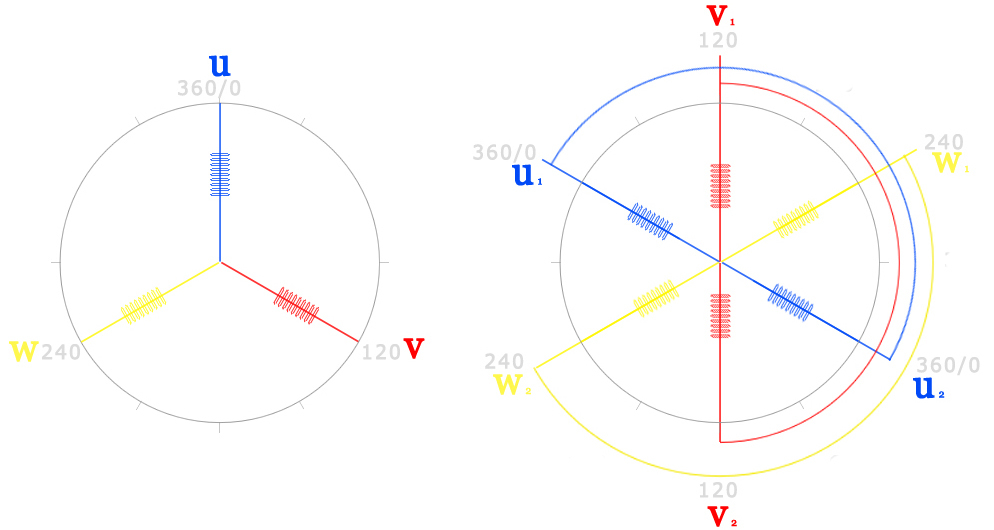 а. б. Рисунок 11. Модель двигателя с одной (a) и с двумя (б) парами полюсов.
а. б. Рисунок 11. Модель двигателя с одной (a) и с двумя (б) парами полюсов.Двигатель с двумя парами полюсов имеет 6 обмоток, каждая из обмоток парная, каждая группа из 3 обмоток смещена между собой на 120 электрических градусов. На рисунке 12б. отложен один период для 6 обмоток. Обмотки U1-U2, V1-V2, W1-W2 соединены между собой и в конструкции представляют 3 провода вывода фаз. Для простоты рисунка не отображены соединения, но следует запомнить, что U1-U2, V1-V2, W1-W2 одно и то же.
На рисунке 12, исходя из данных таблицы 1, изображены вектора для одной и двух пар полюсов.
 а. б. Рисунок 12. Схема векторов магнитного поля для двигателя с одной (a) и с двумя (б) парами полюсов.
а. б. Рисунок 12. Схема векторов магнитного поля для двигателя с одной (a) и с двумя (б) парами полюсов.На рисунке 13 изображены вектора, созданные 6 коммутациями обмоток двигателя с одной парой полюсов. Ротор состоит из постоянных магнитов, за 6 шагов ротор провернется на 360 механических градусов. На рисунке обозначены конечные положения ротора, в промежутках между двумя соседними положениями ротор проворачивается от предыдущего к следующему скоммутированному состоянию. Когда ротор достигает данного конечного положения, должно происходить следующее переключение и ротор будет стремиться к новому заданному положению, так чтобы его вектор магнитного поля стал сонаправлен с вектором электромагнитного поля статора.
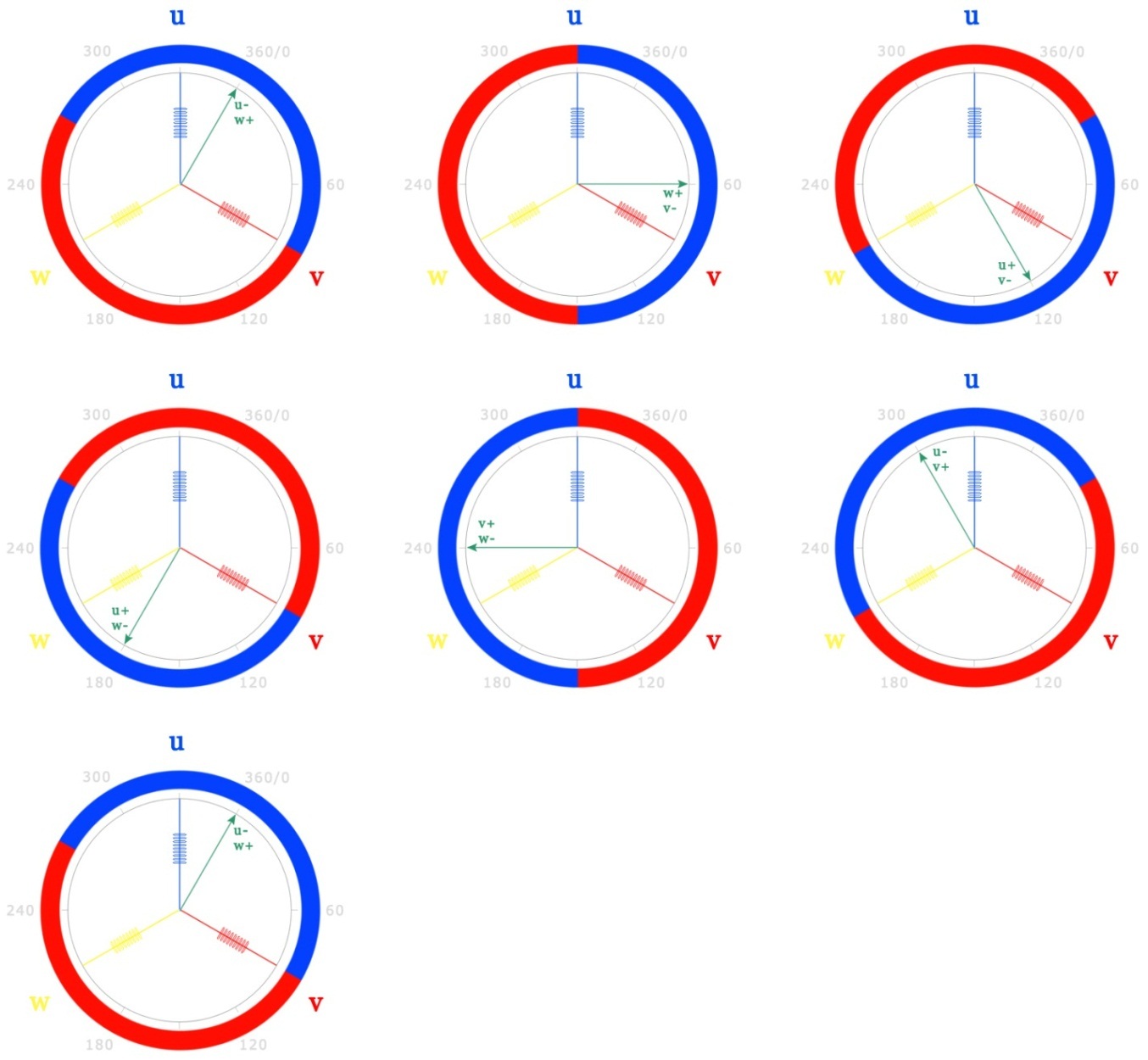 Рисунок 13. Конечные положения ротора при шестиступенчатой коммутации бесколлекторного двигателя с одной парой полюсов.
Рисунок 13. Конечные положения ротора при шестиступенчатой коммутации бесколлекторного двигателя с одной парой полюсов.В двигателях с N парами полюсов необходимо пройти N электрических периодов для полного механического оборота. Двигатель с двумя парами полюсов будет иметь два магнита с полюсами S и N, и 6 обмоток (рисунок 14). Каждая группа из 3 обмотки смещены друг относительно друга на 120 электрических градусов.
 Рисунок 14. Конечные положения ротора при шестиступенчатой коммутации бесколлекторного двигателя с двумя парами полюсов.
Рисунок 14. Конечные положения ротора при шестиступенчатой коммутации бесколлекторного двигателя с двумя парами полюсов.Определение положения ротора бесколлекторного двигателя Как было сказано ранее для работы двигателя необходимо в нужные моменты времени подключать напряжение на нужные обмотки статора. Подавать напряжение на обмотки двигателя нужно в зависимости от положения ротора, так чтобы магнитное поле статора всегда опережало магнитное поле ротора. Для определения положения ротора двигателя и коммутаций обмоток используют электронный блок управления. Отслеживание положения ротора возможно несколькими способами: 1. По датчикам Холла 2. По обратной ЭДС Как правило, датчиками Холла производители оснащают двигатель при выпуске, поэтому это самый распространённый метод управления. Коммутирование обмоток в соответствии с сигналами обратной ЭДС позволяет отказаться от датчиков встроенных в двигатель и использовать в качестве датчика анализ свободной фазы двигателя, на которую будет наводиться магнитным полем противо-ЭДС.
Управление бесколлекторным двигателем с датчиками Холла Чтобы коммутировать обмотки в нужные моменты времени необходимо отслеживать положение ротора в электрических градусах. Для этого применяются датчики Холла. Поскольку имеется 6 состояний вектора магнитного поля необходимо 3 датчика Холла, которые будут представлять один абсолютный датчик положения с трехбитным выходом. Датчики Холла устанавливаются также как обмотки, смещенные между собой на 120 электрических градусов. Это позволяет использовать магниты ротора в качестве воздействующего элемента датчика.
 Рисунок 15. Сигналы с датчиков Холла за один электрический оборот двигателя.
Рисунок 15. Сигналы с датчиков Холла за один электрический оборот двигателя.Для вращения двигателя необходимо чтобы магнитное поле статора опережало магнитное поле ротора, положение, когда вектор магнитного поля ротора сонаправлен с вектором магнитного поля статора является конечным для данной коммутации, именно в этот момент должно происходить переключение на следующую комбинацию, чтобы не давать ротору зависать в стационарном положении. Cопоставим сигналы с датчиков Холла с комбинацией фаз которые необходимо скоммутировать (таблица 2)
Таблица 2. Сопоставление сигналов датчиков Холла с коммутацией фаз двигателя.
| Положение двигателя | HU(1) | HV(2) | HW(3) | U | V | W |
| 0 | 0 | 0 | 1 | 0 | - | + |
| 1 | 0 | 1 | + | - | 0 | |
| 1 | 0 | 0 | + | 0 | - | |
| 1 | 1 | 0 | 0 | + | - | |
| 0 | 1 | 0 | - | + | 0 | |
| 360/N | 0 | 1 | 1 | - | 0 | + |
 Рисунок 16. Вид сигнала с датчиков Холла.
Рисунок 16. Вид сигнала с датчиков Холла.Управление с помощью сигнала обратной ЭДС Существуют бесколлекторный двигатели без датчиков положения. Определение положения ротора осуществляется с помощью анализа сигнала ЭДС на свободной фазе двигателя. В каждый момент времени к одной из фаз подключен «+» к другой «-» питания, одна из фаз остается свободной. Вращаясь, магнитное поле ротора наводит ЭДС в свободной обмотке. По мере вращения напряжение на свободной фазе изменяется (рисунок 17).
 Рисунок 17. Изменение напряжения на фазе двигателя.
Рисунок 17. Изменение напряжения на фазе двигателя.Сигнал с обмотки двигателя разбит на 4 момента: 1. Обмотка подключена к 0 2. Обмотка не подключена (свободная фаза) 3. Обмотка подключена к питающему напряжению 4. Обмотка не подключена (свободная фаза) Сопоставив сигнал с фаз с управляющим сигналом, видно, что момент перехода на следующее состояние можно детектировать пересечением средней точки (половины питающего напряжения) с фазой, которая в данный момент не подключена (рисунок 18).
 Рисунок 18. Сопоставление управляющего сигнала с сигналом на фазах двигателя.
Рисунок 18. Сопоставление управляющего сигнала с сигналом на фазах двигателя.После детектирования пересечения необходимо выдержать паузу и включать следующее состояние. По данному рисунку составлен алгоритм переключений состояний обмоток (таблица 3).
Таблица 3. Алгоритм переключения обмоток двигателя
| Текущее состояние | U | V | W | Следующее состояние |
| 1 | - | Ожидание пересечения средней точки из + в - | + | 2 |
| 2 | Ожидание пересечения средней точки из — в + | - | + | 3 |
| 3 | + | - | Ожидание пересечения средней точки из + в - | 4 |
| 4 | + | Ожидание пересечения средней точки из — в + | - | 5 |
| 5 | Ожидание пересечения средней точки из + в - | + | - | 6 |
| 6 | - | + | Ожидание пересечения средней точки из — в + | 1 |
 Рисунок 19. Детектирование средней точки компаратором.
Рисунок 19. Детектирование средней точки компаратором.Компаратор срабатывает в момент перехода напряжения через среднюю точку и генерирует сигнал для микроконтроллера.
Обработка сигнала с фаз двигателя Однако сигнал с фаз при регулировании скорости ШИМ отличается видом, и имеет импульсный характер (рисунок 21), в таком сигнале невозможно детектировать пересечение со средней точкой.
 Рисунок 20. Вид сигнала фазы при регулировании скорости ШИМ.
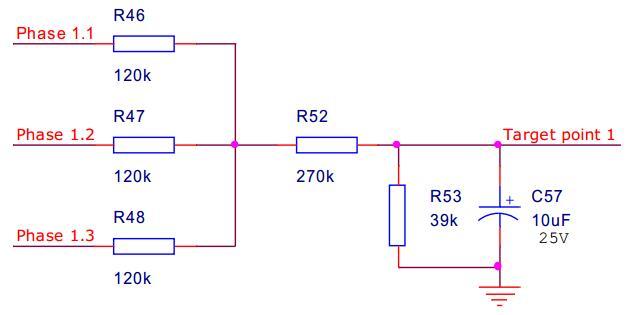
Рисунок 20. Вид сигнала фазы при регулировании скорости ШИМ.Поэтому данный сигнал следует отфильтровать RC фильтром чтобы получить огибающую, а так же разделить под требования компаратора. По мере увеличения скважности шим сигнал будет возрастать по амплитуде (рисунок 22).
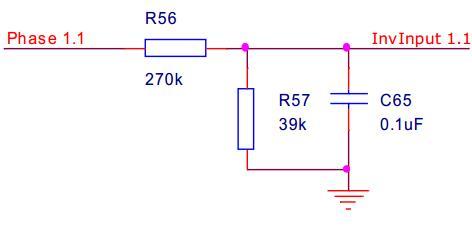 Рисунок 21. Схема делителя и фильтра сигнала с фазы двигателя.
Рисунок 21. Схема делителя и фильтра сигнала с фазы двигателя. Рисунок 22. Огибающая сигнала при изменении скважности ШИМ.
Рисунок 22. Огибающая сигнала при изменении скважности ШИМ.Схема со средней точкой
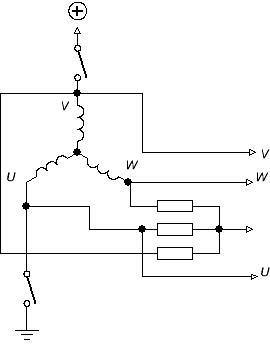 Рисунок 23. Вид виртуальная средней точки. Картинка взята с avislab.com/
Рисунок 23. Вид виртуальная средней точки. Картинка взята с avislab.com/С фаз снимаются сигналы через токограничительные резисторы и объединяются, получается вот такая картина:
 Рисунок 24. Вид осциллограммы напряжения виртуальной средней точки.
Рисунок 24. Вид осциллограммы напряжения виртуальной средней точки.Из-за ШИМ, напряжение средней точки не постоянно, сигнал так же необходимо фильтровать. Напряжение средней точки после сглаживания будет достаточно большим (в районе питающего напряжения двигателя), его необходимо разделить делителем напряжения до значения половины питающего напряжения.
После прохождения сигнала через фильтр колебания сглаживается и получается ровное напряжение относительно которого можно детектировать пересечение обратной ЭДС.
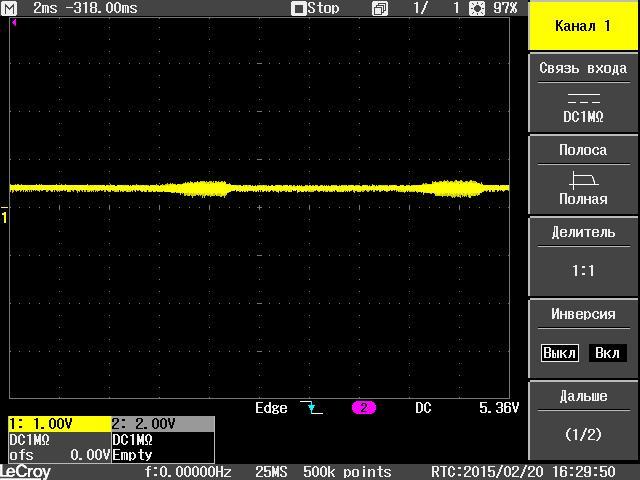 Рисунок 26. Напряжение после делителя и фильтра низких частот.
Рисунок 26. Напряжение после делителя и фильтра низких частот.Средняя точка будет менять свое значение в зависимости от напряжения (скважности ШИМ), так же как и огибающая сигнала.

Полученные сигналы с компараторов заводятся на микроконтроллер, который их обрабатывает по алгоритму выше. Пока на этом все.
habr.com
механическое сопротивление, мы вначале тратим механические силы на то, чтобы зарядить конденсатор , а затем сливать энергию с конденсатора в нагрузку через обмотку генератора, превращая его в двигатель.
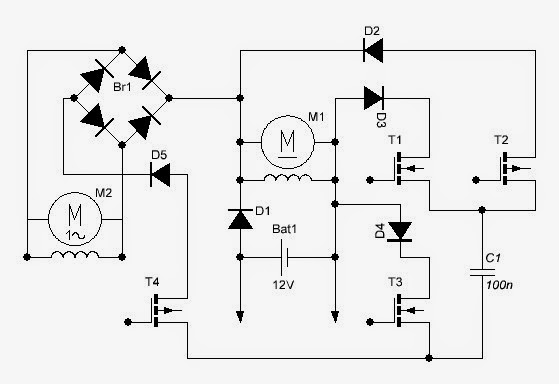 Суть схемы состоит в том, что М2 - это генератор (синхронный, асинхронный т.д.) относительно высокого напряжения, М1 - это низковольтный двигатель. Ключи Т1 и Т4 коммутируют генератор так, чтобы ток от генератора проходил через обмотки двигателя и накапливался в конденсаторе. Т2 и Т3 - ключ разряда конденсатора на двигатель. В данном случае идея заимствована от Тесла Свитч.
Суть схемы состоит в том, что М2 - это генератор (синхронный, асинхронный т.д.) относительно высокого напряжения, М1 - это низковольтный двигатель. Ключи Т1 и Т4 коммутируют генератор так, чтобы ток от генератора проходил через обмотки двигателя и накапливался в конденсаторе. Т2 и Т3 - ключ разряда конденсатора на двигатель. В данном случае идея заимствована от Тесла Свитч. 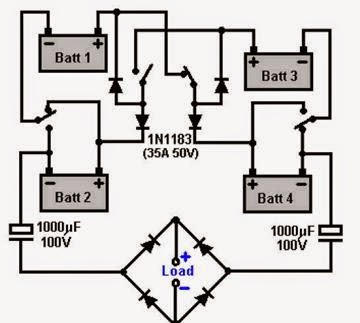
\Вот более обновлённый вариант схемы. Здесь добавлена группа ключей для коммутации крнденсатора, с которого энергия поступает на инвертор и на нагрузку.
Сигналы управления навиты от генератора Стенли Мейера у которого использовалось два мотора, хотя описания само С. Мейера по включения непонятны. Говорят он саму ячеку запрещал показывать, значит все патенты можно рассматривать как общее описание его генератора водорода без раскрытия самой сути.

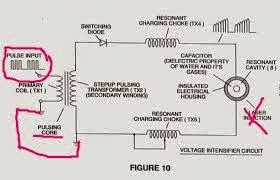
Однако сходство состоит в том, что между конденсатором и трансформатором стоит не просто дроссель а обмотка двигателя, а трансформатор заменён на мотор, хотя на видео именно мотор и генератор участвуют в генерации водорода. Для объяснения сути взял выдержку из патента.

Данный график в моём варианте - это пачки чередующихся импульсов разряд-заряда. А паузы - это время за которое включается двигатель для раскрутки маховика. Соответственно ротор и маховик должны иметь достаточную массу, чтобы за счёт инерции стабилизировать ход двигателя. Поскольку на генераторе напряжения предполагаются сотни вольт, как и на конденсаторе, то при наличии паузы низковольтный источник отдаст мотору энергию автоматически.
Итак, для закрепления материала

Если обратно вернутся к циклам и цифрам, то первый цикл - это заряд конденсатора, второй цикл- это разряд конденсатора через обмотку генератора (двигателя) на обмотку. Предположим, что этот генератор вращает отдельный двигатель. обороты равны 1500 в минуту. Это частота вращения 25 оборотов в сек. Каждый оборот это 0.04 сек.
Если За один оборотов происходит 5 зарядов и 5 разрядов, общее 10, то каждый разряд и заряд конденсатора по 0.004 секунлы. Это означает, что каждые 0.004 происходит чередования механического сопротивление внешнему мотору и вращению.
Чем короче время заряда и разряда конденсатора, тем чаще происходит за один оборот моментов сопротивлению ускорению для внешнего привода типа электро-двигатель или ДВС. Чем больше масса маховика на валу, который обеспечит больше инерции, тем стабильнее будет осуществляться вращение системы внешний мотор моторо-генератор. Тем лучше будет восприниматься внешним мотором резкое чередование момента торможения и ускорения как отсутствие механического противодействия.
electromagnetizm.blogspot.com
Действие генераторов постоянного тока основано на явлении электромагнитной индукции, открытой М. Фарадеем в 1831 году. В соответствии с этим явлением при движении проводника в магнитном поле со скоростью V перпендикулярно силовым линиям магнитной индукции В в нем наводится ЭДС, определяемая как
 (1)
(1)
где Ei - ЭДС, наводимая в одном проводнике обмотки якоря, направление которой определяется правилом правой руки;
В - магнитная индукция;
1 - длина проводника, пересекаемая силовыми линиями магнитной индукции;
V- скорость пересечения проводника силовыми линиями магнитной индукции
Для определения выражения ЭДС генератора введем такое понятие, как полюсное деление τ, представляющее собой часть окружности якоря, соответствующую одному полюсу [1,8,12]. Более точное понятие полюсного деления связывается с геометрической нейтралью [1,3,12]. Под геометрической нейтралью понимается линия на поверхности якоря, проходящая в осевом направлении по средине между соседними полюсами. Часть окружности якоря между геометрическими нейтралями называется полюсным делением. При работе машины постоянного тока магнитная индукция на геометрической нейтрали равна нулю. Щетки для подведения напряжения к обмотке якоря двигателя и для снятия напряжения с генератора устанавливаются на коллекторе таким образом, чтобы в момент перехода щеток с одной коллекторной пластины на другую, напряжение между этими пластинами было минимальным (близким к нулю). В данном случае говорят, что щетки установлены на геометрической нейтрали. Как правило, при этом они располагаются по осям полюсов. Причем, при вращении якоря, каждая из щеток соприкасается только с той коллекторной пластиной, а соответственно и с теми проводниками обмотки якоря, которые находятся под полюсом одной полярности. Поэтому одна из щеток всегда будет иметь одну полярность, например «плюс», а вторая щетка другую - «минус».
Количество полюсных делений соответствует числу полюсов. Если например, электрическая машина имеет одну пару плюсов р=1 ( то есть два полюса ), то этому соответствует и два полюсных деления. Если же р=2, то количество полюсных делений, естественно, равно четырем. Полюсное деление определяется как
 (2)
(2)
где  - полюсное деление;
- полюсное деление;
D - внешний диаметр якоря;
р - число пар полюсов.
Для удобства практического использования изменим выражение (1). Линейная скорость проводника, находящегося в пазу якоря, может быть выражена через его частоту вращения:
 (3)
(3)
где n - частота вращения якоря.
Тогда 
Представим в последнем выражении длину окружности якоря через полюсное деление из выражения ( 2 ):
 (4)
(4)
Произведение (l·τ) представляет собой площадь S, которую пронизывают силовые линии магнитной индукции, создаваемой обмоткой возбуждения полюса. В свою очередь известно, что произведение магнитной индукции однородного поля на перпендикулярную к ее силовым линиям поверхность носит название магнитного потока Ф.
С учетом этого последнее выражение примет вид:
 (5)
(5)
В выражении ( 5 ) частота вращения представлена размерностью с-1, то есть количеством оборотов якоря в секунду. На практике во многих случаях она выражается количеством оборотов в минуту, тогда
 (6)
(6)
Полученное выражение определяет ЭДС одного проводника обмотки якоря. В общем случае в ней может содержаться N активных проводников, а число ее параллельных ветвей - составлять 2а. На основании этого ЭДС одной параллельной ветви Е обмотки якоря определится как
 (7)
(7)
Введем коэффициент, зависящий от конструкции данной машины Се – постоянной ЭДС [1,4,5,7,18]:

Окончательно будем иметь:

Таким образом, ЭДС генератора постоянного тока пропорциональна основному магнитному потоку Ф, создаваемому обмоткой возбуждения, и частоте вращения якоря n .
Машины постоянного тока, как генераторы, так и двигатели, подразделяются по способу возбуждения в них основного магнитного потока: на машины с независимым возбуждением и самовозбуждением. Машины с самовозбуждением в свою очередь делятся на машины параллельноговозбуждения ( шунтовые ), последовательного возбуждения ( сериесные ) и смешанного возбуждения ( компаундные ), рис.11.8.
Принцип действия двигателя постоянного тока.
Принцип работы двигателя основан на движении проводника с током в магнитном поле. Электромагнитная сила Fi, действующая на один проводник обмотки якоря, находящийся под полюсом, определяется выражением
 (10)
(10)
где B - магнитная индукция;
L - длина проводника, находящегося в магнитном поле;
I - ток, проходящий по проводнику ( по одной параллельной ветви обмотки якоря).
Сила по выражению (10 ) направлена в соответствии с правилом левой руки. Иногда это выражение представляют в несколько ином виде, заменяя длину проводника L из произведения S= τ∙lполюсное деление как τ=π∙D/(2∙p)и ток, проходящий через активный проводник, отношением I=Iя/(2∙a).Тогда
 (11)
(11)
где Ф - основной магнитный поток, создаваемый током обмотки возбуждения;
р - число пар полюсов двигателя
Iя - ток в обмотке якоря;
а - число пар параллельных ветвей обмотки якоря;
D - диаметр якоря.
Момент вращения Mi, создаваемый каждым проводником обмотки якоря, определяется выражением:

Суммарный электромагнитный момент, создаваемый всеми активными проводниками N обмотки якоря, будет иметь вид:
 (12)
(12)
В полученном выражении выделим постоянный коэффициент См, зависящий от конструктивных особенностей данного двигателя [2,18]:
 (13)
(13)
Электромагнитный момент двигателя постоянного тока с учетом выражения ( 13 ) представляется в виде
 (14)
(14)
Если машина постоянного тока работает в режиме двигателя, то наличие тока в обмотке якоря, как видно из выражения (14), создает его момент вращения, а при работе в режиме генератора, как будет показано ниже, - тормозной момент.
Читайте также:
lektsia.com
Принцип действия машин постоянного тока.
Принцип действия генератора. Простейший генератор можно представить в виде витка, вращающегося в магнитном поле (рис. 1.4, а, б). Концы витка выведены на две пластины коллектора. К коллекторным пластинам прижимаются неподвижные щетки, к которым подключается внешняя цепь.
Принцип работы генератора основан на явлении электромагнитной индукции. Пусть виток приводится во вращение от внешнего приводного двигателя ПД. Проводники активной части витка пересекают магнитное поле и в них по закону электромагнитной индукции наводятся ЭДС e1 и e2, направление которых определяется по правилу правой руки. При вращении витка по направлению движения часовой стрелки в верхнем проводнике, находящемся под северным полюсом, ЭДС направлена от нас, а в нижнем, находящемся под южным полюсом, – к нам. По ходу витка ЭДС складываются, результирующая ЭДС е = е1 – е2.
 Если внешняя цепь замкнута, то по ней потечет ток, направленный от нижней щетки к потребителю и от него – к верхней щетке. Нижняя щетка оказывается положительным выводом генератора, а верхняя – отрицательным. При повороте витка на 180° проводники из зоны одного полюса переходят в зону другого полюса и направление ЭДС в них изменяется на обратное. Одновременно верхняя коллекторная пластина входит в контакт с нижней щеткой, а нижняя – с верхней, направление тока во внешней цепи не изменяется. Таким образом, коллекторные пластины не только обеспечивают соединение вращающего витка с внешней цепью, но и выполняют роль переключающегося устройства, т. е. являются простейшим механическим выпрямителем.
Если внешняя цепь замкнута, то по ней потечет ток, направленный от нижней щетки к потребителю и от него – к верхней щетке. Нижняя щетка оказывается положительным выводом генератора, а верхняя – отрицательным. При повороте витка на 180° проводники из зоны одного полюса переходят в зону другого полюса и направление ЭДС в них изменяется на обратное. Одновременно верхняя коллекторная пластина входит в контакт с нижней щеткой, а нижняя – с верхней, направление тока во внешней цепи не изменяется. Таким образом, коллекторные пластины не только обеспечивают соединение вращающего витка с внешней цепью, но и выполняют роль переключающегося устройства, т. е. являются простейшим механическим выпрямителем.
Принцип действия двигателя. То же устройство работает в режиме электрического двигателя (рис. 1.5), если к щеткам подвести постоянное напряжение. Под действием напряжения U через щетки, пластины коллектора и виток потечет ток i. По закону электромагнитной силы (закон Ампера) взаимодействие тока и магнитного поля В создает силу f, которая направлена перпендикулярно i. Направление силы f определяется правилом левой руки (рис. 1.5): на верхний проводник сила действует вправо, на нижний – влево. Эта пара сил создает вращающий момент Мвр, поворачивающий виток по часовой стрелке. При переходе верхнего проводника в зону южного полюса, а нижнего – в зону северного полюса концы проводников и соединенные с ними коллекторные пластины вступают в контакт со щетками другой полярности.

Рис.1.5
Направление тока в проводниках витка изменяется на противоположное, а направление сил f, момента Мвр и тока во внешней цепи не изменяется. Виток непрерывно будет вращаться в магнитном поле и может приводить во вращение вал рабочего механизма (РМ).
Таким образом, коллектор в режиме двигателя не только обеспечивает контакт внешней цепи с витком, но и выполняет функцию механического инвертора, т.е. преобразует постоянный ток во внешней цепи в переменный ток в витке.
Рассмотрение принципа действия показывает, что машина постоянного тока может работать как в режиме генератора, так и в режиме двигателя, т. е. обладает свойством обратимости.
Противодействующий момент и противо-ЭДС. При работе машины в режиме генератора по замкнутой внешней цепи и витку обмотки якоря протекает ток, направление которого совпадает с направлением ЭДС (рис. 1.4,6), взаимодействие тока с магнитным полем полюсов создает момент М, направленный в рассматриваемом случае против часовой стрелки. Так как приложенный к витку вращающий момент приводного двигателя Мвр направлен по часовой стрелке, то возникающий при работе генератора момент называется противодействующим моментом Мnp. По существу возникновение Мпр — это реакция машины на воздействие внешнего момента Мвр, а физическая природа противодействующего момента та же, что и вращающего момента у двигателя. В установившемся режиме работы генератора между Мвр и Мпр устанавливается равновесие и Мвр=Мпр.
При работе машины в режиме двигателя проводники якоря пересекают магнитное поле и в них наводится ЭДС (рис. 1.5,б). Ее направление определяется по правилу правой руки. В рассматриваемом случае она направлена против тока и, следовательно, навстречу приложенному напряжению сети U и поэтому называется противо-ЭДС Enp. Физическая природа противо-ЭДС та же, что и ЭДС генератора. В установившемся режиме работы двигателя между Enp и U устанавливается равновесие и можно считать, что Enp ≈ U .
Таким образом, при работе машины постоянного тока в любом режиме во вращающихся проводниках наводится ЭДС Е и возникает момент М, но роль их в разных режимах различная.
electrono.ru











