





Шаговый двигатель – двигатель со сложной схемой управления, которому требуется специальное электронное устройство – драйвер шагового двигателя. Драйвер шагового двигателя получает на входе логические сигналы STEP/DIR, которые, как правило, представлены высоким и низким уровнем опорного напряжения 5 В, и в соответствии с полученными сигналами изменяет ток в обмотках двигателя, заставляя вал поворачиваться в соответствующем направлении на заданный угол. Сигналы STEP/DIR генерируются ЧПУ-контроллером или персональным компьютером, на котором работает программа управления типа Mach4 или LinuxCNC.
Задача драйвера – изменять ток в обмотках как можно более эффективно, а поскольку индуктивность обмоток и ротор гибридного шагового двигателя постоянно вмешиваются в этот процесс, то драйверы весьма отличаются друг от друга своими характеристиками и качеством получаемого движения. Ток, протекающий в обмотках, определяет движение ротора: величина тока задает крутящий момент, его динамика влияет на равномерность и т.п.
Драйверы делятся по способу закачки тока в обмотки на несколько видов
Эти драйверы подают постоянный уровень напряжения поочередно на обмотки, результирующий ток зависит от сопротивления обмотки, а на высоких скоростях – и от индуктивности. Эти драйверы крайне неэффективны, и могут быть использованы только на очень малых скоростях.
В драйверах этого типа ток в обмотке сперва поднимается до нужного уровня с помощью высокого напряжения, затем источник высокого напряжения отключается, и нужная сила тока поддерживается источником малого напряжения. Такие драйверы достаточно эффективны, помимо прочего они снижают нагрев двигателей, и их все еще можно иногда встретить в высококлассном оборудовании. Однако, такие драйверы поддерживают только режим шага и полушага.
На текущий момент ШИМ-драйверы шаговых двигателей наиболее популярны, практически все драйверы на рынке – этого типа. Эти драйверы подают на обмотку шагового мотора ШИМ-сигнал очень высокого напряжения, которое отсекается по достижению током необходимого уровня. Величина силы тока, по которой происходит отсечка, задается либо потенциометром, либо DIP-переключателем, иногда эта величина программируется с помощью специального ПО. Эти драйверы достаточно интеллектуальны, и снабжены множеством дополнительных функций, поддерживают разные деления шага, что позволяет увеличить дискретность позиционирования и плавность хода. Однако, ШИМ-драйверы также весьма сильно отличаются друг от друга. Помимо таких характеристик, как питающее напряжение и максимальный ток обмотки, у них отличается частота ШИМ. Лучше, если частота драйвера будет более 20 кГц, и вообще, чем она больше – тем лучше. Частота ниже 20 кГц ухудшает ходовые характеристки двигателей и попадает в слышимый диапазон, шаговые моторы начинают издавать неприятный писк. Драйверы шаговых двигателей вслед за самими двигателями делятся на униполярные и биполярные. Начинающим станкостроителям настоятельно рекомендуем не экспериментировать с приводами, а выбрать те, по которым можно получить максимальный объем технической поддержки, информации и для которых продукты на рынке представлены наиболее широко. Такими являются драйверы биполярных гибридных шаговых двигателей.
Ниже будут описаны только практические рекомендации по выбору ШИМ-драйвера биполярного шагового двигателя. При этом предполагается, что Вы уже определились с моделью двигателя, его характеристиками и т.п.
purelogic.ru
Более научное определение - драйвер шагового двигателя это электронное силовое устройство, которое на основании цифровых сигналов управления управляет сильноточными/высоковольтными обмотками шагового двигателя и позволяет шаговому двигателю делать шаги (вращаться).
Управлять ШД намного сложнее чем обычным коллекторным двигателем — нужно в определенной последовательности переключать напряжения в обмотках с одновременным контролем тока. Поэтому для управления ШД разработаны специальные устройства — драйверы ШД. Драйвер ШД позволяет управлять вращением ротора ШД в соответствии с сигналами управления и электронным образом делить физический шаг ШД на более мелкие дискреты.
К драйверу ШД подключается источник питания, сам ШД (его обмотки) и сигналы управления. Стандартом по сигналам управления является управление сигналами STEP/DIR или CW/CCW и сигнал ENABLE.
Протокол STEP/DIR:
Сигнал STEP — Тактирующий сигнал, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг выставленный на драйвере — 1:1, 1:8, 1:16 и т.д.). Обычно драйвер отрабатывает шаг по переднему или заднему фронту импульса.
Сигнал DIR — Потенциальный сигнал, сигнал направления. Логическая единица — ШД вращается по часовой стрелке, ноль — ШД вращается против часовой стрелки, или наоборот. Инвертировать сигнал DIR обычно можно либо из программы управления или поменять местами подключение фаз ШД в разъеме подключения в драйвере.
Протокол CW/CCW:
Сигнал CW — Тактирующий сигнал, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг выставленный на драйвере — 1:1, 1:8, 1:16 и т. д.) по часовой стрелке. Обычно драйвер отрабатывает шаг по переднему или заднему фронту импульса.
Сигнал CW — Тактирующий сигнал, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг выставленный на драйвере — 1:1, 1:8, 1:16 и т. д.) против часовой стрелки. Обычно драйвер отрабатывает шаг по переднему или заднему фронту импульса.
Сигнал ENABLE — Потенциальный сигнал, сигнал включения/выключения драйвера. Обычно логика работы такая: логическая единица (подано 5В на вход) — драйвер ШД выключен и обмотки ШД обесточены, ноль (ничего не подано или 0В на вход) — драйвер ШД включен и обмотки ШД запитаны.
Драйверы ШД могут иметь дополнительные функции:
• Контроль перегрузок по току.
• Контроль превышения напряжения питания, защита от эффекта обратной ЭДС от ШД. При замедлении вращения, ШД вырабатывает напряжение, которое складывается с напряжением питания и кратковременно увеличивает его. При более быстром замедлении, напряжение обратной ЭДС больше и больше скачок напряжения питания. Этот скачок напряжения питания может привести к выходу из строя драйвера, поэтому драйвер имеет защиту от скачков питающего напряжения. При превышении порогового значения напряжения питания драйвер отключается.
• Контроль переполюсовки при подключении сигналов управления и питающих напряжений.
• Режим автоматического снижения тока обмотки при простое (отсутствии сигнала STEP) для снижения нагрева ШД и потребляемого тока (режим AUTO-SLEEP).
• Автоматический компенсатор среднечастотного резонанса ШД. Резонанс обычно проявляется в диапазоне 6-12 об/сек, ШД начинает гудеть и ротор останавливается. Начало и сила резонанса сильно зависит от параметров ШД и его механической нагрузки. Автоматический компенсатор среднечастотного резонанса позволяет полностью исключить резонирование ШД и сделать его вращение равномерным и устойчивым во всем диапазоне частот.
• Схему изменения формы фазовых токов с увеличением частоты (морфинг, переход из режима микрошага в режим шага при увеличении частоты). ШД способен отдать заявленный в ТХ момент только в режиме полного шага, поэтому в обычном драйвере ШД без морфинга при использовании микрошага ШД работает на 70% от максимальной мощности. Драйвер ШД с морфингом позволяет получить от ШД максимальную отдачу по моменту во всем диапазоне частот.
• Встроенный генератор частоты STEP – удобная функция для пробного запуска драйвера без подключения к ПК или другому внешнему генератору частоты STEP. Также генератор будет полезен для построения простых систем перемещения без применения ПК.
purelogic.ru
Драйвер A4988 — предназначен для управления биполярными шаговыми двигателями, работающими от напряжения 8 — 35 В и потребляющими до 2 А на каждую обмотку двигателя. Драйвер построен на базе одноимённого чипа A4988 производства Allegro, он получил широкое распространение (в роботостроении, станках ЧПУ, 3D принтерах и т.д) благодаря простоте подключения и широкому функционалу.
Общие сведения:Как и в большинстве драйверов шаговых двигателей, силовая часть чипа A4988 представляет собой сдвоенный Н мост на полевых транзисторах, но больший интерес представляет логическая часть чипа. Драйвер позволяет выбирать размер шага: 1/1, 1/2, 1/4, 1/8 и 1/16 (подробно описано ниже, в разделе «выбор размера шага двигателя»). Чип оснащён множеством схем защит отключающих его при: перегреве, перегрузке по току, коротком замыкании и пониженном питании. Чип автоматически выбирает режим затухания тока (медленный / быстрый) и позволяет ограничивать максимальный выходной ток двигателя (настраивается подстроечным резистором, подробно описано ниже, в разделе «ограничение максимального тока двигателя»).
Назначение выводов драйвера:• «ENABLE» — Разрешение работы чипа («0» — разрешить работу, «1» — выключить чип).• «MS1» … «MS3» — Выбор размера шага (устанавливает кратность угла поворота двигателя за 1 шаг).• «RESET» — Перезагрузка логики чипа («0» — перезагрузить, «1» — обычный режим работы).• «SLEEP» — Перевод чипа в спящий режим («0» — сон, «1» — обычный режим работы).• «STEP» — Вход тактовых импульсов (за один импульс двигатель поворачивается на один шаг).• «DIR» — Выбор направления вращения двигателя («0» — в одну сторону, «1» — в другую сторону).• «VMOT» — Питание двигателя (8 … 35 В).• «VLOG» — Питание логики чипа (3 … 5,5 В).• «1A», «1B» — Подключение первой обмотки двигателя.• «2A», «2B» — Подключение второй обмотки двигателя.

На шине питания двигателя (между выводами VMOT и GND) рекомендуется установить электролитический конденсатор, как можно ближе к плате драйвера. Ёмкость конденсатора должна быть не ниже 1000 мкФ, а его рабочее напряжение должно превышать напряжение в шине питания двигателя минимум на 25%.
Двигатель подключается следующим образом: провода первой обмотки подключаются к выводам 1A, 1B драйвера, провода второй обмотки подключаются к выводам 2A, 2B драйвера. Если вы перепутаете обмотки двигателя (1, 2) или перепутаете начало и конец обмотки (A, B) то двигатель всё равно будет работать. Если двигатель будет вращаться в другую сторону, то поменяйте местами начало и конец (A и B) одной из обмоток (1 или 2).
Если Вы не знаете какие провода двигателя являются окончанием его обмоток, то до подключения двигателя к драйверу, выполните следующие действия: плавно вращайте ротор двигателя, поочерёдно замыкая между собой по два разных провода двигателя. Как только вы почувствуете что ротор стало тяжелее вращать, значит два замкнутых провода являются окончанием одной обмотки. Следовательно остальные два провода, являются окончанием второй обмотки.
Почему на схеме соединены выводы «RESET» и «SLEEP» драйвера? Дело в том, что вход «SLEEP» драйвера A4988 внутрисхемно подтянут к уровню логической «1» (спящий режим отключён), а вход «RESET» не подтянут к «1» и не прижат к «0». Соединение выводов «SLEEP» и «RESET» приведёт к тому, что логическая «1» со входа «SLEEP» попадёт и на вход «RESET» драйвера (тот же результат можно достичь просто подав «1» на вход «RESET»). Значит и спящий режим, и перезагрузка, будут отключены, и недоступны.
Примечание:• Подключение и отключение двигателя от выводов «1A», «1B», «2A», «2B» при наличии питания двигателя VMOT может вывести драйвер из строя.• У платы драйвера по 8 выводов с каждой стороны, если подключить питание перепутав стороны платы (повернуть плату драйвера на 180°), то она точно выйдет из строя.
Управление двигателем:Шаговый двигатель это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Один оборот ротора (360°) состоит из определённого количества шагов. Количество полных шагов в одном обороте указывается в технической документации двигателя.
Управление шаговым двигателем осуществляется через входы «ENABLE», «STEP» и «DIR» драйвера (если считать, что выводы «RESET» и «SLEEP» соединены как на схеме). Подача логического «0» на вход «ENABLE» разрешает работу драйвера. С каждым фронтом импульса на входе «STEP», ротор двигателя будет поворачиваться на один шаг, направление поворота которого будет зависеть от логического уровня на входе «DIR».
Пример для двигателя 17HS1352-P4130 в полношаговом режиме:• Для разрешения работы драйвера, необходимо установить уровень логического «0» на входе «ENABLE» (так как вход инверсный).• У двигателя 17HS1352-P4130, один оборот ротора состоит из 200 полных шагов, значит за один полный шаг ротор повернётся на 1,8° (360° / 200 шагов).• Если подать на вход «STEP» 400 импульсов, при наличии логической «1» на входе «DIR», то ротор двигателя совершит два полных оборота в одну сторону.• Если подать на вход «STEP» 400 импульсов, при наличии логического «0» на входе «DIR», то ротор двигателя совершит два полных оборота в другую сторону.• Чем выше частота следования импульсов на входе «STEP», тем быстрее будет осуществляться поворот ротора.• Если работа драйвера разрешена (на входе «ENABLE» уровень логического «0») и на вход «STEP» не поступают импульсы, то ротор двигателя будет удерживаться в одном и том же положении, вне зависимости от уровня на входе «DIR». Удержание ротора означает что его трудно (или невозможно) повернуть прикладывая внешнюю физическую силу.• При подаче логической «1» на вход «ENABEL», драйвер отключится и ротор двигателя освободится, вне зависимости от состояния на остальных входах драйвера.
Примечание:Входы «STEP» и «DIR» не имеют внутрисхемной подтяжки к «1» или «0». Значит их нельзя оставлять не подключёнными.
Выбор размера шага двигателя:В предыдущем разделе указано, что один оборот ротора осуществляется за определённое количество шагов. Но шаговыми двигателями можно управлять не только в полношаговом режиме (1 шаг за такт), а еще и в полушаговом (1/2 шага за такт), и микрошаговом (1/4, 1/8, 1/16 … шага за такт).
Например, ротор двигателя 17HS1352-P4130 совершит полный оборот (360°) за:• 200 шагов в полношаговом режиме (1,8° за такт)• 400 шагов в полушаговом режиме = 1/2 шага (0,9° за такт)• 800 шагов при размере шага 1/4 (0,45° за такт)• 1600 шагов при размере шага 1/8 (0,225° за такт)• 3200 шагов при размере шага 1/16 (0,1125° за такт)
Чем больше шагов в полном обороте ротора двигателя, тем плавнее он вращается, но при этом уменьшается крутящий момент (сила вращения).
Драйвер A4988 позволяет выбрать 1 из 5 вариантов размера шага двигателя. Выбор размера шага осуществляется установкой логических уровней на входах драйвера MS3, MS2, MS1, в соответствии с таблицей:
| Полношаговый режим | 0 | 0 | 0 |
| 1/2 шага | 0 | 0 | 1 |
| 1/4 шага | 0 | 1 | 0 |
| 1/8 шага | 0 | 1 | 1 |
| 1/16 шага | 1 | 1 | 1 |
Примечание:Входы MS3, MS2 и MS1 драйвера, внутрисхемно прижаты к GND (через сопротивления в несколько десятков кОм). Так что если их оставить не подключёнными, то драйвер будет работать в полношаговом режиме.
Ограничение максимального тока двигателя:Если на двигатель подать напряжение выше его номинального значения, это приведёт к увеличению скорости шага. Но увеличение напряжения приведёт и к увеличению силы тока, а превышение максимального тока двигателя, выведет его из строя.
Но драйвер A4988 позволяет ограничивать максимальный выходной ток двигателя (настраивается подстроечным резистором на плате драйвера). Таким образом можно увеличить напряжение в сети питания двигателя, предварительно ограничив выходной ток, по следующей формуле:
IMAX = VREF * 8 * RSENSE, следовательно, VREF = IMAX / (8 * RSENSE) где:
 |
Расположение деталей на плате драйвера:Синим цветом обведены токочувствительные резисторы RSENSE = 0,1 Ом. Так как драйвер ограничивает токи в двух обмотках двигателя, то и резисторов RSENSE на плате, тоже два.Зелёным цветом обведён подстроечный резистор, для регулировки опорного напряжения VREF. |
В представленной выше формуле, значения IMAX (номинальный ток двигателя) и RSENSE(токочувствительное сопротивление) являются константами, а единственный параметр который можно менять, это опорное напряжение VREF. Настройка опорного напряжения VREF осуществляется подстроечным резистором, без подачи питания двигателя VMOT. Состояния на входах «ENABLE», «STEP», «DIR», «MS-3», «MS-2», «MS-1» драйвера, не влияют на настройку опорного напряжения VREF(если их логические уровни не меняются во время настройки). Настройку можно выполнять даже при отключённом от драйвера двигателе.
Пример:Настройка ограничения максимального тока для двигателя с номинальным током в 1 А.IMAX = 1 А.RSENSE = 0,1 Ом.V<sub «=»»>REF = I<sub «=»»>MAX / (8 * R<sub «=»»>SENSE) = 1 / (8 * 0,1) = 1,25 В.Подаём питание логической части драйвера VLOG. Не подаём питание двигателя VMOT. Подключаем вольтметр черным щупом к любому выводу GND, а красным щупом к центральному выводу подстроечного резистора (металлическая вращающая часть). Поворачивая вращающуюся часть подстроечного резистора, добиваемся показаний на вольтметре = 1,25 В. Теперь можно подать питание двигателя VMOT. Ток протекающий через его обмотки не будет превышать 1 А.
Примечание:Обратите внимание на картинку ниже, на ней показаны токи протекающие через обмотки двигателя в различных режимах размера шага. Если Ваш двигатель будет работать в полношаговом режиме, то максимальный ток будет ограничен 70,71% от установленного IMAX. Значит для полношагового режима работы это нужно учесть при расчёте IMAX. Так для приведенного выше примера, в полношаговом режиме работы, IMAX должен быть равен 1 А * 100 / 70,71 = 1A / 0,7071 = 1,41 A. Следовательно VREF = 1,41 / (8 * 0,1) = 1,7625 В. Но это только для полношагового режима работы двигателя.

Питание:• Напряжение питания логической части драйвера, от 3 до 5,5 В постоянного тока, подаётся на выводы GND и VLOG.• Напряжение питания двигателя, от 8 до 35 В постоянного тока, подаётся на выводы GND и VMOT.
Спецификация:• Напряжение питания двигателя: 8 … 35 В.• Максимальный ток на одну обмотку двигателя: 1 А без радиатора, (2 А с радиатором)*.• Напряжение питания логической части драйвера: 3 … 5,5 В.• Размер одного шага двигателя: от 1 до 1/16 полного шага.• Защита: от перегрева, от перегрузки по току, от короткого замыкания, от пониженного питания.• Габариты платы драйвера: 20×15 мм.• Габариты радиатора: 9x5x9 мм.
Примечание:Чип A4988 может работать с выходным током до 2 А при наличии радиатора. Но выходной ток ограничивается напряжением V<sub «=»»>REF которое снимается с подстроечного резистора на плате драйвера. Максимальное значение V<sub «=»»>REF зависит от номиналов подстроечного резистора, и резистора R1 который входит в состав резистивного делителя. Производители устанавливают на платах резисторы различных номиналов, следовательно, максимальный ток для разных плат может отличаться. Для платы указанной на картинке, максимальное значение V<sub «=»»>REF = 1,35 В, следовательно максимальный выходной ток (IMAX) = VREF * 8 * RSENSE = 1,35 * 8 * 0,1 = 1,08 А.
Комплектация:• 1x Драйвер A4988.• 1x Радиатор.
xn----7sbhgu4ahbanfnng.xn--p1ai
Добавлено в закладки: 3
Сегодня утром в нашем Чате ROMERO опубликовал ссылку на новенький драйвер для шаговых двигателей – LV8729. Посмотрим, на что он сгодится.

LV8729 изготовлены китайской компанией MakerBase Technology, известной интегрированными платами электроники MKS GEN и MKS SBase. Драйвер позиционируется как тихий драйвер для RAMPS 1.4 и совместимой электроники. Ограничение по току 1,5А для шаговых двигателей. Интересен не интерполированным микрошагом 1/128. Посмотрим в даташит.

Расположение чипа похоже на TMC2100. Радиатор опять клеим не на чип.

Помните. При неправильном подключении, драйвер и контроллер сгорят!


Для 1/128 все три перемычки должны быть установлены.
I = Vref / 0,5
Значения уже рассчитаны, смотрите в таблице. По умолчанию Vref настроен на 0,4В. Максимальное значение 0,75В соответствует 1,5А для двигателя.

Пожалуйста отключите все двигатели или драйверы сгорят.
Подключите питание и USB.
Для увеличение тока – крутим подстроечный резистор по часовой стрелке

Если TMC2100 был сделан для 8-и битной электроники, то LV8729 создан для 32-х битной электроники. Здесь нет интерполяции микрошага, поэтому можно достигнуть высокой точности перемещений с двигателями имеющими шаг 0,9°. При этом уровень шума должен быть эквивалентен паре TMC2100 и шаговому двигателю с шагом 1,8°.
Если уровень шума не важен, то за меньшие деньги можно поставить драйвер DRV8825 с микрошагом 1/32 в паре с двигателями с шагом 0,9°. При этом различий в качестве печати по FDM технологии не должно быть.
В итоге: этот драйвер нужен владельцам 32-х битной электроники, желающим снижения уровня шума шаговых двигателей на своих 3D принтерах. Для 8-и битной электроники по прежнему остаётся актуальным TMC2100.
p.s. Комфортный режим работы до 1А. Выше 1,2А сильно нагревается. (Из опыта работы нашего коллеги Faster на ЧПУ станах)
Метки: LV8729, драйвер, шум   2016-11-05      Раздел: Обзор    Автор: AKDZG Просмотров: 15 410   8 комментариев
Автор: AKDZG Просмотров: 15 410   8 комментариев
3deshnik.ru

Компактный драйвер шагового двигателя может управлять электрическим мотором с током до 3.5 В и диапазоном напряжений постоянного тока питания от 10 до 50 В. Эта схема основана на STK672-440. ИМС STK672-440 — это гибридная микросхема 2-фазный драйвер шагового двигателя с ШИМ с микро-степпингом.
Примечание: сама плата может работать с двигателем до 36 В, а для питания 50 В используется микросхема стабилизатор LM317, которая обеспечивает 5 В.
 Электрическая схема драйвера ШД
Электрическая схема драйвера ШД Таблица микростеппинга
Таблица микростеппингаВнешние контакты могут быть использованы для выбора 2, 1-2, П1-2, 2, В1-2, или 4W1-2 возбуждения.
 Подключение к плате мотора
Подключение к плате мотораВремя переключения на 4-фазное распределительное устройство может быть изменено путем установки внешнего кода. Фазы сохраняются даже при режиме возбуждения переключается.
 Плата с деталями — фото
Плата с деталями — фотоТок двигателя может быть установлена с помощью потенциометра, также PIN-код может быть использован, чтобы сократить выходной ток при сохранении режима возбуждения мотора. Полная документация на микрошаговый драйвер находится в архиве.
 Загрузка...
Загрузка...
2shemi.ru
Добавлено в закладки: 9
Я сам очень долго не уделял этому вопросу должного внимания. Во первых не хотел разбираться. Во вторых считал, что настройка в рабочих условиях (во время тестовой печати на завышенных режимах) самая правильная. Это конечно верно, но настал момент, когда в моей коллекции появился третий вид драйверов TMC2100 и чтобы их адекватно сравнить с драйверами A4988 нужно их одинаково и правильно настроить по току используемого шагового двигателя.
17HS4401 ток 1,7A – обычные
17HS8401 ток 1,8А – более мощные
17HS4402 ток 1,3A – по некоторым сведениям менее шумные, чем 17HS4401
A4988 на ток до 2А – очень широко распространён и недорогой

DRV8825 на ток до 2,2А – интересен большей мощностью и микрошагом 1/32
TMC2100 на ток RMS 1,2А (с пиками до 2,5А) – интересен самостоятельным дроблением микрошага 1/16 до 1/255, что в итоге снижает шум работы шагового двигателя не загружая при этом дополнительными расчётами Ардуину.
Видимо для этого драйвера больше подходят двигатели с низким током, например 17HS4402. С этим двигателем драйвер будет меньше нагреваться, а значит его достаточно обдувать низкооборотистым бесшумным вентилятором.

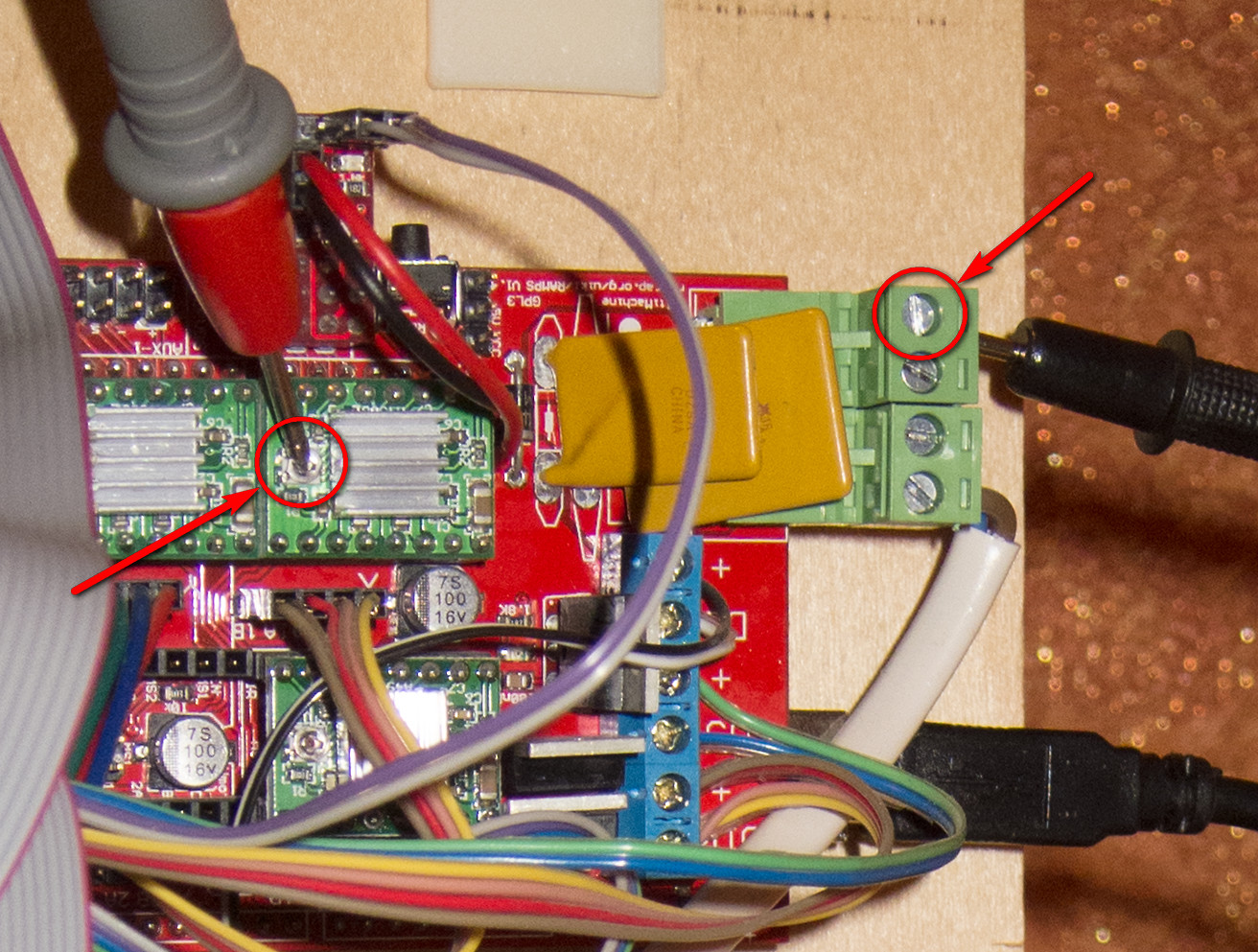
Минусовой щуп мультиметра подсоединяем к контакту GND (минус, он общий), плюсовым прикасаемся к корпусу подстроечного резистора на драйвере. Крутим подстроечный резистор отвёрткой и замеряем расчётное напряжение Vref. Таким образом мы выставляем правильный ток для драйвера шагового двигателя. Для каждого вида драйвера своя формула расчета Vref.
Vref – пин замера напряжения для установки тока по формуле.
Current Limit – ток шагового двигателя.
A4988
Формула Vref для A4988 изменяется от номинала токочувствительных резисторов. Это два чёрных прямоугольника на плате драйвера. Обычно подписаны R050 или R100.
Vref = Current Limit * 8 * (RS)
RS = 0,100Vref = Current Limit * 8 * 0,100 = Current Limit / 1,25
RS = 0,050Vref = Current Limit * 8 * 0,050 = Current Limit / 2,5
Например для 17HS4401: Vref = 1,7 / 2,5 = 0,68В
DRV8825
Current Limit = Vref * 2
Vref = Current Limit / 2
Например для 17HS4401: Vref = 1,7 / 2 = 0,85В
TMC2100
Irms = (Vref * 1,77A) / 2,5V
Vref = (Irms * 2,5V) / 1,77A
Current Limit = 1.41 * Irms
Например для 17HS4401: Vref = (Current Limit * 0,707 * 2,5В) / 1,77А = (1,7 * 0,707 * 2,5) / 1,77 = 1,697В
При таком Vref шаговый двигатель возможно будет нагреваться, поэтому Vref придётся подстроить во время работы.

В некоторых случаях для снижения нагрева драйвера приходится снижать Vref, а значит для защиты от пропуска шагов нужно уменьшать ускорения в прошивке. Соответственно при снижении ускорений общая скорость печать 3D принтера снижается. Разумный минимум для ускорений 500 мм/с^2. Отсюда вывод: уровень шума можно снизить почти на любом 3D принтере, снижая ускорения и Vref, но при этом Vref придётся подбирать опытным путём.
Тестовый G-код примерно такой (правил в процессе и после)
G21G90M107G28 X0M117 Run Test…G1 F12000 X100G1 F6000 X5G1 F12000 X100G1 F6000 X200G1 F3000 X100G1 F1500 X5G1 F3000 X100G1 F1500 X200M117 Test Done!G91G28 X0M84G90
Используем аудиоредактор Audacity. Примитивный микрофон подключен к встроенной аудиокарте ПК. Микрофон прижат к корпусу ШД и сверху обмотан поролоном. Надеюсь этого хватит для регистрации уровня шума.
Vref устанавливаю на 0,58В, запускаю программу из Pronterface и записываю звук с микрофона. Затем повторяю запись на Vref = 0,78В. Картинки уровней громкости складываю в Фотошопе для наглядности сравнения. Вот что получилось:
Красным Vref = 0,58В
Синим Vref = 0,78В

На некоторых скоростях разность в громкости вполне существенная. Такие напряжения взяты для наглядности, хотя и не сильно отличаются. На не настроенном драйвере может стоять любое напряжение Vref!
Подробнее про эти драйверы можно почитать на сайтах производителей:
https://www.pololu.com/category/120/stepper-motor-drivers
https://github.com/watterott/SilentStepStick/blob/master/docu/FAQ.md
Для более глубокого понимания формул смотрите отдельную тему на форуме по этому вопросу.
Ссылка на обсуждение на форуме методов борьбы с шумом 3D принтера.
Метки: A4988, DRV8825, TMC2100, драйверы   2016-01-12      Раздел: Настройка, Электроника   Автор: AKDZG Просмотров: 154 611   45 комментариев
3deshnik.ru

Драйвер шагового двигателя своими руками — хотя биполярные шаговые двигатели относительно дороги, для своих физических размеров они обеспечивают высокий вращающий момент. Однако для двух обмоток мотора требуется восемь управляющих транзисторов, соединенных в четыре Н-моста. Каждый транзистор должен выдерживать перегрузки и короткие замыкания и быстро восстанавливать работоспособность. А драйверу, соответственно, требуются сложные схемы защиты с большим количеством пассивных компонентов.
 Рисунок 1
Рисунок 1
Рисунок 1. Одна микросхема в корпусе для поверхностного монтажа и несколько пассивных компонентов могут управлять биполярным шаговым двигателем.
Драйвер шагового двигателя своими руками — на Рисунке 1 показана альтернативная схема драйвера двигателя, основанная на аудио усилителе класса D компании Maxim. Микросхема МАХ9715 в миниатюрном корпусе для поверхностного монтажа может отдавать мощность до 2.8 Вт в типичную нагрузку 4 или 8 Ом. Каждый из двух выходов микросхемы образован Н-мостами из мощных MOSFET, управляющими парами линий OUTR+, OUTR- и OUTL+, OUTL-, которые подключаются к обмоткам А и В шагового двигателя, соответственно. Каждая пара формирует дифференциальный широтно-модулированный импульсный сигнал с номинальной частотой переключения 1.22 МГц. Малый уровень помех, создаваемых схемой, исключает необходимость в выходных фильтрах.
Конденсаторы С1, С3, С4 и С6 служат развязкой для входов питания и смещения, а С5 и С7 выполняют накопительные функции для мощных выходных усилителей класса D. Конденсаторы С8 и С9 ограничивают полосу пропускания усилителя до 16 Гц, а ферритовые бусины L2 и L3 ослабляют электрические помехи, наводимые на длинные кабели. П-образный фильтр C1, C2, L1 подавляет помехи на входе питания микросхемы IС1. Входные сигналы микросхемы Шаг_А и Шаг_В, управляющие, соответственно, правым и левым каналами двигателя, могут формироваться любым подходящим контроллером. Внутренние цепи защищают усилитель от коротких замыканий и перегрева в случае неисправности шагового двигателя или неправильного подключения его выводов.
 Таблица 1
Таблица 1
Таблица 1 иллюстрирует последовательность импульсов Шаг_А и Шаг_В, управляющих вращением типичного шагового двигателя в одном направлении путем непрерывной подачи комбинаций сигналов от 0 до 4. Шаг 4 возвращает вал двигателя в исходное положение, завершая оборот в 360°. Чтобы изменить направление вращения мотора, начинайте формировать временную диаграмму импульсов снизу таблицы и последовательно двигайтесь по ней вверх. Подав напряжение низкого логического уровня на вход SHDN микросхемы (вывод 8), можно отключить оба канала усилителя. Формы сигналов на входах и выходах схемы представлены на Рисунке 2.
 Рисунок 2
Рисунок 2
Формы сигналов в схеме на Рисунке 2: вход Шаг_А (Канал 1), вход Шаг_В (Канал 2), выходы OUTR+ (Канал 3), OUTR- (Канал 4) и сигнал на обмотках двигателя (OUTR+ минус OUTR-, средняя осциллограмма), вычисленный с помощью математической функции осциллографа.
usilitelstabo.ru









