





Статья "для чайников" с сайта www.myrobot.ru:
Для управления двигателями робота необходимо устройство, которое бы преобразовывало управляющие сигналы малой мощности в токи, достаточные для управления моторами. Такое устройство называют драйвером двигателей.
Существует достаточно много самых различных схем для управления электродвигателями. Они различаются как мощностью, так и элементной базой, на основе которой они выполнены.
Мы остановимся на самом простом драйвере управления двигателями, выполненном в виде полностью готовой к работе микросхемы. Эта микросхема называется L293D и является одной из самых распространенных микросхем, предназначенных для этой цели.
L293D содержит сразу два драйвера для управления электродвигателями небольшой мощности (четыре независимых канала, объединенных в две пары). Имеет две пары входов для управляющих сигналов и две пары выходов для подключения электромоторов. Кроме того, у L293D есть два входа для включения каждого из драйверов. Эти входы используются для управления скоростью вращения электромоторов с помощью широтно модулированного сигнала (ШИМ).
L293D обеспечивает разделение электропитания для микросхемы и для управляемых ею двигателей, что позволяет подключить электродвигатели с большим напряжением питания, чем у микросхемы. Разделение электропитания микросхем и электродвигателей может быть также необходимо для уменьшения помех, вызванных бросками напряжения, связанными с работой моторов.
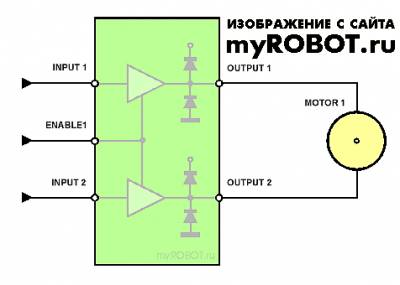
Принцип работы каждого из драйверов, входящих в состав микросхемы, идентичен, поэтому рассмотрим принцип работы одного из них.
К выходам OUTPUT1 и OUTPUT2 подключим электромотор MOTOR1. На вход ENABLE1, включающий драйвер, подадим сигнал (соединим с положительным полюсом источника питания +5V). Если при этом на входы INPUT1 и INPUT2 не подаются сигналы, то мотор вращаться не будет.
Если вход INPUT1 соединить с положительным полюсом источника питания, а вход INPUT2 - с отрицательным, то мотор начнет вращаться.
Теперь попробуем соединить вход INPUT1 с отрицательным полюсом источника питания, а вход INPUT2 - с положительным. Мотор начнет вращаться в другую сторону.
Попробуем подать сигналы одного уровня сразу на оба управляющих входа INPUT1 и INPUT2 (соединить оба входа с положительным полюсом источника питания или с отрицательным) - мотор вращаться не будет.
Если мы уберем сигнал с входа ENABLE1, то при любых вариантах наличия сигналов на входах INPUT1 и INPUT2 мотор вращаться не будет.
Теперь рассмотрим назначение выводов микросхемы L293D.
Диташит можно найти здесь.
miet-robotics.livejournal.com
 Существует достаточно много самых различных схем для управления электродвигателями. Они различаются как мощностью, так и элементной базой, на основе которой они выполнены.
Существует достаточно много самых различных схем для управления электродвигателями. Они различаются как мощностью, так и элементной базой, на основе которой они выполнены.
Мы остановимся на самом простом драйвере управления двигателями, выполненном в виде полностью готовой к работе микросхемы. Эта микросхема называется L293D и является одной из самых распространенных микросхем, предназначенных для этой цели.
L293D содержит сразу два драйвера для управления электродвигателями небольшой мощности (четыре независимых канала, объединенных в две пары). Имеет две пары входов для управляющих сигналов и две пары выходов для подключения электромоторов. Кроме того, у L293D есть два входа для включения каждого из драйверов. Эти входы используются для управления скоростью вращения электромоторов с помощью широтно модулированного сигнала (ШИМ).
L293D обеспечивает разделение электропитания для микросхемы и для управляемых ею двигателей, что позволяет подключить электродвигатели с большим напряжением питания, чем у микросхемы. Разделение электропитания микросхем и электродвигателей может быть также необходимо для уменьшения помех, вызванных бросками напряжения, связанными с работой моторов.
Принцип работы каждого из драйверов, входящих в состав микросхемы, идентичен, поэтому рассмотрим принцип работы одного из них.
К выходам OUTPUT1 и OUTPUT2 подключим электромотор MOTOR1. На вход ENABLE1, включающий драйвер, подадим сигнал (соединим с положительным полюсом источника питания +5V). Если при этом на входы INPUT1 и INPUT2 не подаются сигналы, то мотор вращаться не будет.
Если вход INPUT1 соединить с положительным полюсом источника питания, а вход INPUT2 - с отрицательным, то мотор начнет вращаться.
Теперь попробуем соединить вход INPUT1 с отрицательным полюсом источника питания, а вход INPUT2 - с положительным. Мотор начнет вращаться в другую сторону.
Попробуем подать сигналы одного уровня сразу на оба управляющих входа INPUT1 и INPUT2 (соединить оба входа с положительным полюсом источника питания или с отрицательным) - мотор вращаться не будет.
Если мы уберем сигнал с входа ENABLE1, то при любых вариантах наличия сигналов на входах INPUT1 и INPUT2 мотор вращаться не будет.
Представить лучше принцип работы драйвера двигателя можно, рассмотрев следующую таблицу: ENABLE1 INPUT1 INPUT2 OUTPUT1 OUTPUT2 1 0 0 0 0 1 1 0 1 0 1 0 1 0 1 1 1 1 1 1
Теперь рассмотрим назначение выводов микросхемы L293D.
Входы ENABLE1 и ENABLE2 отвечают за включение каждого из драйверов, входящих в состав микросхемы. Входы INPUT1 и INPUT2 управляют двигателем, подключенным к выходам OUTPUT1 и OUTPUT2. Входы INPUT3 и INPUT4 управляют двигателем, подключенным к выходам OUTPUT3 и OUTPUT4. Контакт Vs соединяют с положительным полюсом источника электропитания двигателей или просто с положительным полюсом питания, если питание схемы и двигателей единое. Проще говоря, этот контакт отвечает за питание электродвигателей. Контакт Vss соединяют с положительным полюсом источника питания. Этот контакт обеспечивает питание самой микросхемы. Четыре контакта GND соединяют с "землей" (общим проводом или отрицательным полюсом источника питания). Кроме того, с помощью этих контактов обычно обеспечивают теплоотвод от микросхемы, поэтому их лучше всего распаивать на достаточно широкую контактную площадку.
Характеристики микросхемы L293D
напряжение питания двигателей (Vs) - 4,5...36V напряжение питания микросхемы (Vss) - 5V допустимый ток нагрузки - 600mA (на каждый канал) пиковый (максимальный) ток на выходе - 1,2A (на каждый канал) логический "0" входного напряжения - до 1,5V логическая "1" входного напряжения - 2,3...7V скорость переключений до 5 kHz. защита от перегрева
Примечание: Об особенностях L293DNE - аналога микросхемы L293D
Раздел: [Конструкции средней сложности] Сохрани статью в:2zv.ru

Существует достаточно много самых различных схем для управления электродвигателями. Они различаются как мощностью, так и элементной базой, на основе которой они выполнены.
Мы остановимся на самом простом драйвере управления двигателями, выполненном в виде полностью готовой к работе микросхемы. Эта микросхема называется L293D и является одной из самых распространенных микросхем, предназначенных для этой цели.L293D содержит сразу два драйвера для управления электродвигателями небольшой мощности (четыре независимых канала, объединенных в две пары). Имеет две пары входов для управляющих сигналов и две пары выходов для подключения электромоторов. Кроме того, у L293D есть два входа для включения каждого из драйверов. Эти входы используются для управления скоростью вращения электромоторов с помощью широтно модулированного сигнала (ШИМ).
L293D обеспечивает разделение электропитания для микросхемы и для управляемых ею двигателей, что позволяет подключить электродвигатели с большим напряжением питания, чем у микросхемы. Разделение электропитания микросхем и электродвигателей может быть также необходимо для уменьшения помех, вызванных бросками напряжения, связанными с работой моторов.
Принцип работы каждого из драйверов, входящих в состав микросхемы, идентичен, поэтому рассмотрим принцип работы одного из них.

Если вход INPUT1 соединить с положительным полюсом источника питания, а вход INPUT2 - с отрицательным, то мотор начнет вращаться.
Теперь попробуем соединить вход INPUT1 с отрицательным полюсом источника питания, а вход INPUT2 - с положительным. Мотор начнет вращаться в другую сторону.
Попробуем подать сигналы одного уровня сразу на оба управляющих входа INPUT1 и INPUT2 (соединить оба входа с положительным полюсом источника питания или с отрицательным) - мотор вращаться не будет.
Если мы уберем сигнал с входа ENABLE1, то при любых вариантах наличия сигналов на входах INPUT1 и INPUT2 мотор вращаться не будет.
Представить лучше принцип работы драйвера двигателя можно, рассмотрев следующую таблицу:
| ENABLE1 | INPUT1 | INPUT2 | OUTPUT1 | OUTPUT2 |
| 1 | 0 | 0 | 0 | 0 |
| 1 | 1 | 0 | 1 | 0 |
| 1 | 0 | 1 | 0 | 1 |
| 1 | 1 | 1 | 1 | 1 |
Характеристики микросхемы L293D
напряжение питания двигателей (Vs) - 4,5...36V напряжение питания микросхемы (Vss) - 5V допустимый ток нагрузки - 600mA (на каждый канал) пиковый (максимальный) ток на выходе - 1,2A (на каждый канал) логический "0" входного напряжения - до 1,5V логическая "1" входного напряжения - 2,3...7V скорость переключений до 5 kHz. защита от перегрева
Примечание:
Об особенностях L293DNE - аналога микросхемы L293D - см. дополнение к статье "Простейший робот на одной микросхеме"(http://cybernetics.at.ua/publ/sdelaj_robota_shag_za_shagom/chast_1_osnovy_ehlektroniki/prostejshij_robot_na_odnoj_mikroskheme/14-1-0-109).
Дополнение:
Из бесед Бибота и Бобота
Дорогой Бобот, а можно ли использовать в приводимой схеме простейшего робота какие-либо другие микросхемы, например L293DNE? Конечно, можно, но видишь ли, в чем дело, дружище Бибот. Настоящая L293D выпускается только группой компаний ST Microelectronics. Все остальные подобные микросхемы являются лишь заменителями или аналогами L293D. К таким аналогам относятся L293DNE американской компании Texas Instruments, SCP-3337 от Sensitron Semiconductor... Естественно, что, как и многие аналоги, эти микросхемы имеют свои отличия, которые тебе будет необходимо учитывать, когда ты будешь делать своего робота.
А не мог бы ты рассказать об отличиях, которые мне необходимо будет учесть при использовании L293DNE.С удовольствием, старина Бибот. Все микросхемы линейки L293D имеют входы, совместимые с TTL-уровнями*, но лишь совместимостью уровней некоторые из них не ограничиваются. Так, L293DNE имеет не только совместимость с TTL по уровням напряжения, но и обладает входами с классической TT-логикой. То есть на неподключенном входе присутствует логическая "1".
Прости, Бобот, но я не совсем понимаю: как же мне это учитывать?Если на неподключенном входе у L293DNE присутствует высокий уровень (логическая "1"), то и на соответствующем выходе мы будем иметь сигнал высокого уровня. Если мы теперь подадим на рассматриваемый вход сигнал высокого уровня, говоря по другому - логическую "1" (соединим с "плюсом" питания), то на соответствующем выходе ничего не изменится, так как на входе у нас и до этого была "1". Если же мы подадим на наш вход сигнал низкого уровня (соединим с "минусом" питания), то состояние выхода изменится и на нем будет напряжение низкого уровня.
То есть получается все наоборот: L293D мы управляли с помощью положительных сигналов, а L293DNE нужно управлять с помощью отрицательных.L293D и L293DNE можно управлять как в рамках отрицательной логики, так и в рамках положительной*. Для того чтобы управлять входами L293DNE с помощью положительных сигналов, нам будет необходимо подтянуть эти входы к "земле" подтягивающими резисторами.

Тогда, при отсутствии положительного сигнала, на входе будет присутствовать логический "0", обеспечиваемый подтягивающим резистором. Хитроумные янки называют такие резисторы pull-down, а при подтягивании высокого уровня - pull-up.
Насколько я понял, все, что нам нужно будет добавить в схему простейшего робота, - так это подтягивающие резисторы на входы микросхемы драйвера моторов.Ты совершенно правильно понял, дорогой Бибот. Номинал этих резисторов можно выбрать около 4,7 кОм. Тогда схема простейшего робота будет выглядеть следующим образом.

Причем от номинала резистора R1 будет зависеть чувствительность нашего робота. Чем сопротивление R1 будет меньше, тем чувствительность робота будет ниже, а чем оно будет больше, тем чувствительность будет выше.
А так как в данном случае нам нет необходимости управлять мотором в двух направлениях, то второй вывод мотора мы можем подключить напрямую к "земле". Что даже несколько упростит схему.

И последний вопрос. А в тех схемах роботов, которые ты привел в рамках нашей беседы, может быть использована классическая микросхема L293D?Конечно, может. И я бы даже добавил, что использование pull-down резисторов для L293D будет вполне оправдано.
Источник: http://myrobot.ru
cybernetics.at.ua
| Для управления двигателями робота необходимо устройство, которое бы преобразовывало управляющие сигналы малой мощности в токи, достаточные для управления моторами. Такое устройство называют драйвером двигателей.
Мы остановимся на самом простом драйвере управления двигателями, выполненном в виде полностью готовой к работе микросхемы. Эта микросхема называется L293D и является одной из самых распространенных микросхем, предназначенных для этой цели. L293D содержит сразу два драйвера для управления электродвигателями небольшой мощности (четыре независимых канала, объединенных в две пары). Имеет две пары входов для управляющих сигналов и две пары выходов для подключения электромоторов. Кроме того, у L293D есть два входа для включения каждого из драйверов. Эти входы используются для управления скоростью вращения электромоторов с помощью широтно модулированного сигнала (ШИМ). L293D обеспечивает разделение электропитания для микросхемы и для управляемых ею двигателей, что позволяет подключить электродвигатели с большим напряжением питания, чем у микросхемы. Разделение электропитания микросхем и электродвигателей может быть также необходимо для уменьшения помех, вызванных бросками напряжения, связанными с работой моторов. Принцип работы каждого из драйверов, входящих в состав микросхемы, идентичен, поэтому рассмотрим принцип работы одного из них.  К выходам OUTPUT1 и OUTPUT2 подключим электромотор MOTOR1. На вход ENABLE1, включающий драйвер, подадим сигнал (соединим с положительным полюсом источника питания +5V). Если при этом на входы INPUT1 и INPUT2 не подаются сигналы, то мотор вращаться не будет. Если вход INPUT1 соединить с положительным полюсом источника питания, а вход INPUT2 - с отрицательным, то мотор начнет вращаться. Теперь попробуем соединить вход INPUT1 с отрицательным полюсом источника питания, а вход INPUT2 - с положительным. Мотор начнет вращаться в другую сторону. Попробуем подать сигналы одного уровня сразу на оба управляющих входа INPUT1 и INPUT2 (соединить оба входа с положительным полюсом источника питания или с отрицательным) - мотор вращаться не будет. Если мы уберем сигнал с входа ENABLE1, то при любых вариантах наличия сигналов на входах INPUT1 и INPUT2 мотор вращаться не будет. Представить лучше принцип работы драйвера двигателя можно, рассмотрев следующую таблицу:
Теперь рассмотрим назначение выводов микросхемы L293D. 
|
| ||||||||||||||||||||||||||||||||||||||||||||||||||
xzero.my1.ru
 Существует достаточно много самых различных схем для управления электродвигателями. Они различаются как мощностью, так и элементной базой, на основе которой они выполнены.
Существует достаточно много самых различных схем для управления электродвигателями. Они различаются как мощностью, так и элементной базой, на основе которой они выполнены.







