Инерцио́ид, инерцо́ид, инерционный движитель (ошибочное название «инерционный двигатель») — механизм, устройство или же аппарат, якобы способные приходить в поступательное движение в пространстве (или по поверхности) без взаимодействия с окружающей средой, а лишь за счет перемещения рабочего тела, находящегося внутри. Авторы инерциоидов, показывая действующие модели, либо дают некорректное объяснение их работы, основанное на известных законах физики, либо утверждают, что для создания движения используются некие «новые» (неизвестные современной науке) свойства взаимодействующих инерционных масс и гравитационных полей.
Возможность создания такого движителя отрицается современной наукой из-за противоречия закону сохранения импульса. Критики, не отрицая возможности существования неизвестных физических взаимодействий, настаивают на том, что эффекты таких взаимодействий должны быть на много порядков слабее, чем нужно для их обнаружения и использования в устройствах наподобие предлагаемых авторами.
Согласно закону сохранения импульса mΔv=FΔt{\displaystyle m\Delta v=F\Delta t}, где m{\displaystyle m} - масса грузика с пружиной на инерцоиде, Δv{\displaystyle \Delta v} - приобретаемая им скорость, F{\displaystyle F} - сила для ускорения грузика на пружине, по третьему закону Ньютона, равная силе действия грузика на инерцоид, Δt{\displaystyle \Delta t} - время ускорения грузика на пружине в одном направлении. Если величина импульса mΔv{\displaystyle m\Delta v} равна по абсолютной величине для прямого и обратного направления ускорения грузика, то F{\displaystyle F} тем больше по абсолютной величине, чем Δt{\displaystyle \Delta t} меньше. При ускорении грузика в одну сторону с большим Δt{\displaystyle \Delta t} сила F{\displaystyle F} меньше силы трения покоя, при ускорении грузика в другую сторону сила F{\displaystyle F} больше силы трения покоя и силы трения движения и модель приходит в движение.[1].
Впервые термин «инерцоид» придумал инженер В. Н. Толчин в 1930-е годы. «Тележка Толчина» представляет собой платформу на колесах, наверху которой на рычагах перемещаются один или два груза: в одну сторону медленно, а в другую быстрее. Для перемещения грузов используется, например, пружинный механизм от заводных игрушек. Хотя к колёсам никакой силовой передачи нет, такая тележка приходит в неравномерное, но направленное движение. Аналогичный эффект (но с движением в противоположную сторону) наблюдается и при установке инерцоида на плавающую модель.
В середине 1970-х годов тема инерцоидов была весьма популярна: эти механизмы демонстрировались в телепередачах (напр., «Это вы можете»), про них писали популярные молодёжные научно-технические журналы и т. п.
Принцип действия инерцоидов заключается в том, что их целенаправленное движение вызывается различием силы трения в опоре при прямом и обратном полутакте работы. При сухом трении сопротивление медленному движению превышает сопротивление быстрому (при одном полутакте, когда прилагается малая сила, сила трения покоя не преодолевается и аппарат остаётся на месте; при обратном полутакте сила трения преодолевается, аппарат движется). В жидкостях наоборот — сопротивление быстрому движению преобладает над сопротивлением медленному движению. Объяснение эффекта в жидкостях принципиально иное (так как в жидкостях и газах нет силы трения покоя) и основано на вязкостных силах трения.
Тем самым отрицается заявленная возможность перемещения без взаимодействия с внешней средой — взаимодействие со средой происходит через трение (это доказывают и эксперименты с инерцоидами на крутильных весах, когда направленное движение не возникает[2]; в вакууме движение инерциоидов, работающих на принципе отбрасывания воздуха, также не происходит).
Авторы инерцоидов категорически не согласны с традиционным объяснением; они утверждают, что трение в осях как раз специально делается как можно меньшим и им можно пренебречь (хотя классическая механика для объяснения эффекта привлекает не силу трения в осях, а силу трения между аппаратом (в сухом случае — колёсами) и поверхностью).
Сами авторы утверждают:
 | Несмотря на внешнее сходство, вибратор («виброход») и инерцоид – устройства, принципиально отличные друг от друга. Толчин В. Н. Инерцоид |  |
Г. И. Шипов, большой энтузиаст инерцоидов (впоследствии академик общественной организации РАЕН), для их объяснения использует теорию торсионных полей и якобы разработанное им обобщение механики Ньютона — названное им механикой Декарта («теория физического вакуума»)[3]. Эти методы были раскритикованы научным сообществом[4].
В мае 2008 года был запущен в космос малый космический аппарат «Юбилейный» с инерцоидом на борту. Инициатором доставки в космос инерцоида, прозванного журналистами «гравицапой», был генерал Валерий Меньшиков, директор НИИ космических систем. Эксперименты финансировались в рамках межгосударственной российско-белорусской программы «Космос СГ», где главным исполнителем является также Валерий Меньшиков[5] (однако другие источники утверждают, что, вопреки распространённому мнению, аппаратура не проходила сертификации в Роскосмосе, спутник — студенческий, и, в принципе, любая техника могла принять участие в научной программе спутника[6]). Несмотря на предупреждения учёных о невозможности для такого движителя создать тягу в космосе, поскольку это противоречит одному из фундаментальных физических законов — закону сохранения импульса, его авторы заявляли, что в НИИ КС «движитель без выброса реактивной массы» работал и создавал тягу в 28 грамм. На данный движитель был выдан патент] «Роспатентом».
В июне-июле того же года были проведены первые испытания, результаты которых были названы «неоднозначными»[7], а в феврале 2010 начались полномасштабные эксперименты[8][9].
Как и ожидали учёные, выведенный в космос движитель не смог изменить орбиту спутника. Сам принцип работы "двигателя" и деятельность, связанная с его "созданием", не раз обсуждались и критиковались Комиссией РАН по борьбе с лженаукой.[10]. По мнению академика Эдуарда Круглякова, председателя этой комиссии, подобные эксперименты нанесли ощутимый ущерб как бюджету, так и научному престижу России[5][11].
wikiredia.ru
Технология ожидает финансирования и находится в процессе разработки!




Двигатель на безопорной инерционной тяге представляет собой одну из разновидностей антигравитационного двигателя и позволяет передвигаться в пространстве без колёс, без крыльев, без винтов и без реактивных дюз.
В предлагаемом двигателе используется центробежная сила и смещение центра масс при вращении системы грузов.
На основе собранной модели двигателя человечество получит совершенно новые виды транспорта: летающие авто, космические корабли типа НЛО, летающие без выброса реактивной массы и позволяющие разгоняться до около световых скоростей.




или пиши нам здесь...
карта сайта
Войти Регистрация
Виктор ПотехинПоступила просьба разместить технологию обработки торфа электрогидравлическим эффектом.
Мы ее выполнили!
2018-04-06 19:21:11Виктор ПотехинПоступил вопрос о лазерной очистке металла. Дан ответ. В частности, указана более дешевая и эффективная технология.
2018-04-11 23:18:19Виктор ПотехинПоступил вопрос по термостабилизаторам грунтов в условиях вечной мерзлоты. Дан ответ.
2018-04-29 09:51:54Виктор ПотехинПоступил вопрос по стеклопластиковым емкостям. Дан ответ.
2018-05-04 06:47:56Виктор ПотехинПоступил вопрос по гидропонным многоярусным установкам. Дан ответ. В частности указаны более прорывные технологии в сельском хозяйстве.
2018-05-16 20:22:35Виктор ПотехинПоступил вопрос по выращиванию сапфиров касательно технологии и оборудования. Дан ответ.
2018-05-16 20:23:28Виктор ПотехинПоступил вопрос касательно мотор-колеса Дуюнова и мотор-колеса Шкондина, что лучше. Дан ответ.
2018-05-16 20:30:50Виктор ПотехинПоступил вопрос об организациях, которые осуществляют очистку металла от ржавчины. Дан ответ: оставляйте свои заявки внизу в комментариях. Производители сами найдут вас и свяжутся.
2018-05-17 10:35:28Виктор ПотехинПоступил вопрос касательно санации трубопровода. Дан ответ. В частности указана более инновационная технология.
2018-05-17 18:10:26Виктор ПотехинПоступил вопрос касательно сотрудничества, а именно: определения направлений развития предприятия и составления планов будущего развития. В настоящее время ведутся переговоры. Будет проанализирована исходная информация, совместно выберем инновационные направления и составим планы.
2018-05-18 10:34:05Виктор ПотехинПоступил вопрос касательно электрохимических станков. Дан ответ.
2018-05-18 10:35:57Виктор ПотехинПоступил вопрос относительно пиролизных установок для сжигания ТБО. Дан ответ. В частности, разъяснено, что существуют разные пиролизные установки: для сжигания 1-4 класса опасности и остальные. Соответственно разные технологии и цены.
2018-05-18 11:06:55Виктор ПотехинК нам поступают много заявок на покупку различных товаров. Мы их не продаем и не производим. Но мы поддерживаем отношения с производителями и можем порекомендовать, посоветовать.
2018-05-18 11:08:11Виктор ПотехинПоступил вопрос по гидропонному зеленому корму. Дан ответ: мы не продаем его. Предложено оставить заявку в комментариях для того, чтобы его производители выполнили данную заявку.
2018-05-18 17:44:35Виктор ПотехинПоступает очень много вопросов по технологиям. Просьба задавать эти вопросы внизу в комментариях к записям.
2018-05-23 07:24:36Для публикации сообщений в чате необходимо авторизоваться
Количество просмотров с 26 марта 2018 г.: 116
comments powered by HyperCommentsxn--80aaafltebbc3auk2aepkhr3ewjpa.xn--p1ai
* Данный материал был создан на основе книги физика – теоретика Михаила Георгиевича Иванова «Безопорные двигатели космических аппаратов.»
Безопорный двигатель – упрощенно это устройство, которое перемещается в пространстве за счет импульсов, происходящих в закрытой системе. Роспатент утверждает, цитирую: «.. данное устройство противоречит общепринятым положениям науки…», «…движение системы без отброса реактивной массы за пределы системы невозможно» Так что в России такие устройства как инерциойды и аналогичные механизмы врят ли когда либо будут запатентованы. Однако, как пишет в своей книге физик Михаил Георгиевич – многие патенты за рубежом были выданы на такие устройства, в которых не только патентная комиссия, но и подчас сами авторы изобретений не разбирались… На мой взгляд это похоже на то, что кому то выгодно, чтобы никто не патентовал такие устройства. Но мы с вами не претендуем на нобелевскую, а просто пытаемся доказать на практике что это не только реальные устройства, но и имеющие огромные перспективы. Как утверждает в своей книге Михаил Георгиевич – Безопорные двигатели способны превзойти двигатели будущего, такие как к примеру фотонные или ядерные, разработки которых ведутся не только за границей, но и в России…
По сути все реактивные двигатели приводят в движение летательные аппараты за с чет отброса реактивной струи за пределы аппарата. Это не противоречит законам физики, там все достаточно хорошо изучено и вопросов не возникает. Безопорный двигатель позволяет перемещаться в пространстве с равноускоренным ускорением за счет импульсов, которые происходят в закрытой системе. Прочитав книгу Михаила Георгиевича, я понял насколько простым может быть путь к далеким звездам без особых финансовых затрат, а так же без использования сверхсложных технологий и огромных ресурсов, как материальных так и умственных.
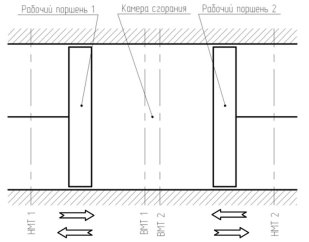
На основе теории Михаила Георгиевича, а так же на своих собственных наблюдениях я построил перспективную модель двигателя для космического аппарата, который с 0успехом может перемещаться как в гравитационных полях, так и в невесомости. Чтобы было проще объяснить – проведем мысленный эксперимент… Представьте, что Вы стоите на льду и держите в руках груз массой скажем 6 кг. Если резко откинуть его от себя, то груз полетит вперед, а Вы в противоположную от направления движения груза сторону. Тут все просто и понятно. По таким же законам происходит и отдача ружья при выстреле и движение ракеты за счет отброса раскаленных газов из сопел с высокой скоростью. А теперь представим, что мы хотели бросить груз, но в последний момент передумали и удержали его в руках. В таком случае Вы переместитесь на определенное расстояние вперед по ходу траектории движения груза в момент его разгона и торможения. Тут так же все понятно. Но есть два нюанса…. В том случае, если Вы резко увеличив скорость груза с нуля до определенного значения и затормозите его на вытянутых руках, то произойдет две вещи, которые нам мешают при конструировании двигателей. При резком увеличении скорости с нуля до максимальной – вас оттолкнет назад. А при резком торможении вас толкнет вперед. Физика таких явлений достаточно проста и относится к школьной механике, поэтому я не буду разбираться в процессах, которые там происходят. Михаил Георгиевич в своей книге так же обратил внимание на эти явления и отнес их к минусам безопорных двигателей. Уменьшать их автор предлагал путем введения в механизм двигателя гасящего устройства, которое будет тормозить рабочее тело, а импульс удара растягивать по времени и векторам, путем использования закругления в передней части аппарата. Примерная схема аппарата представлена на рисунке 1.
Рисунок 1. Разработка Иванова М.Г.
В данном двигателе разгонное колесо разгоняет рабочее тело (шарик) в сторону искривленной поверхности. Шарик двигается вначале равноускоренно, достигнув искривления, он начинает замедляться и отдает импульс силы поверхности аппарата, заставляя его двигаться вперед. Шарик двигаясь по желобу достигает разгонного колеса, которое превращает его движение по прямой в движение по кругу, тем самым окончательно гася импульс тела. Однако автор указывает на недостаток такой конструкции. Он заключается в том, что в такой конструкции двигателя невозможно получить движение по оси аппарата и он будет смещаться в сторону обратного движения тела. Поэтому автор рекомендует использование нескольких двигателей, объединенных в модуль.
На основе такого простого решения я разработал три модели безопорного двигателя. Их можно повторить в домашних условиях. Первый прототип представляет собой аналог установки Михаила Георгиевича с тем отличием, что я применил электромагнитный способ разгона и торможения рабочего тела. Тело в виде стержня (на рисунке представлено сбоку в виде черного шарика) сделано из магнитного материала и намагничено. Стержень позволяет свободно перемещаться внутри аппарата, а его масса будет большей, чем масса шарика такого же диаметра. Как видно из рисунка 2 разгонная катушка L2 разгоняет тело в сторону искривления. Там оно отдает часть своей энергии и начинает двигаться по криволинейной траектории. В районе искривления, который на схеме обозначен буквой G, расположен геркон, который при прохождении через него замыкает цепь питания катушки L2. Вторе тело вылетает в след за первым, благодаря разгонной катушке. В этот момент первое тело достигает катушки L1, в которой создается поле, которое гасит скорость стрежня и он двигаясь по инерции попадает в поле действия катушки L2. Помимо этого на пути тела стоит катушка L3, которая вырабатывает напряжение (при пересечении её магнитным стержнем) для дополнительного оборудования. Однако и этот проект не лишен недостатков, некоторые из которых могут проявиться только в процессе постройки прототипа.
Рис 2. Прототип модуля безопорного двигателя.
Второй прототип более удачен в плане идеи и реализации, однако на данный момент я не готов утверждать что он будет работать. Для этого следует собрать прототип и провести рабочие испытания действующей модели.
Рисунок 3. Второй прототип безопорного двигателя.
В данном двигателе я применил принцип резкого притягивания магнита, закрепленного на вращающемся диске, катушкой с сердечником. Диск вращается с постоянным ускорением до своей проектной скорости, которая зависит от качества исполнения установки, типа двигателя и т.д. Катушка расположена вплотную с небольшим зазором к краю диска. Геркон установлен таким образом, что замыкается в тот момент, когда магнит находиться напротив катушки. За счет притяжения к катушке он толкает всю конструкцию. Чем массивнее магнит – тем сильнее будет импульс. Чем большее притяжение разовьет электромагнит, тем сильнее импульс. А при установке нескольких таких блоков – общая сила системы увеличивается. Так же при наличии электромагнитных катушек по кругу в количестве скажем 8 штук, позволяет путем примитивной схемы управления – менять направление движения аппарата.
Рисунок 4. Двигатель с управляющими катушками.
Более эффективный двигатель, который позволит разогнать двигатель до фантастических скоростей проще собрать используя принцип сообщающихся сосудов. Я разработал такой двигатель, который можно было бы собрать в домашних условиях. Для его изготовления следует выточить из дерева форму, в которую поместить две медицинские груши небольшого размера. Напротив них установить электромагнитные установки, которые за счет движения якоря в катушке смогут сжимать груши. За счет попеременного сжатия груш и разбалансировки установки относительно центра вращения подставки с грушами будет происходить движение установки. Причем используя схему управления сжатием – можно добиться изменения направления движения за очень короткий промежуток времени. Общий вид конструкции представлен на рисунке 5.
Рисунок 5. Вариант жидкостного безопорного двигателя.
В таком двигателе используется любая жидкость. Двигатель вращает основу D по часовой стрелке. В начале движения большая часть жидкости находиться в сосуде В, сосуд С сжат двумя якорями катушек L1 и L2 при повороте основания D на 45 градусов катушки L3 и L4 начинают сдавливать сосуд В, одновременно с этим катушки L1 и L2 отключаются и жидкость через соединение А начинает перетекать в сосуд С. Когда основание D повернулось на 225 градусов от первоначального состояния, сосуд С оказывается полным, а сосуд В сжатым, тем самым создается импульс, который передается всему аппарату через основание, вал двигателя и его крепления. При установке таких двигателей в большом количестве и достаточно высокой скорости движения – можно развить не только высокую скорость, но и большую тягу. Двигатель позволяет перемещаться так же и по поверхности планеты, будучи поставленным на основание с колесами. Для поворота следует вовремя включать катушки. Чтобы повернуть, скажем влево, следует включить катушки на сжатие в тот момент, когда один из сосудов проходит по линии от центра к направлению движения налево. Появившийся импульс заставит всю конструкцию устремиться в сторону движения. При использовании достаточного легкого основания, скоростных и мощных катушек и высокооборотистого двигателя последний вариант двигателя может быть применим даже в индивидуальных средствах перемещения по поверхности. Минус установки в том, что для движения требуется ровная поверхность. Ведь при наклоне плоскости вращения основания D в сторону движения – импульс рабочего тела (жидкости) будет направлен параллельно плоскости вращения основания и установка может упереться в относительно незначительное препятствие. Но в космосе объединив несколько установок в модули и маневрируя ими можно добиться изменения траектории движения и практически на месте совершать повороты в трех измерениях.
Как пишет Михаил Георгиевич в своей книге, такие двигатели способны к быстрому разгону, а так же преодолению скорости света. Для расчета скорости движения, которое достигается при работе прототипа двигателя, представленного на рисунке 4, следует вначале определить ускорение одной установки. Воспользуемся формулой: где m– масса рабочего тела, М – масса установки, u – скорость движения жидкости от сосуда к сосуду, R– радиус основания D.
Предположим, что масса жидкости в наполненном сосуде равна 15 кг, масса установки 1200 кг, скорость движения жидкости 10 м/с, а радиус основания 1 метр. Подставив это в формулу, мы получим, что ускорение равно 1.25 м/с2 Если сосуды наполняются с частотой 1 раз в секунду, то можно считать, что за секунду аппарат приобретает ускорение 1 метр в секунду. Смею предположить, что если объединить несколько таких установок в модуль состоящий из 6 таким двигателей, то суммарное его ускорение будет равно 1.25 м/с2 х 6 =7.5м/с2 . В своей книге автор ведет такие же расчеты, цитируя его и беря во внимание, что скорость вращения основания D равномерна – можно применить формулу расчета скоростиu= at. Рассчитаем что за час, который состоит из 3600 секунд, наш аппарат достигнет скорости 7.5 м/с2 Х 60 сек Х 60 мин = 27 000 м/с = 27 км/с!!! Если скорость света 300 000 км/с разделить на полученную скорость 27 км/с и разделить на количество часов в сутках 24 часа – мы получим, что аппарат с 6 установками, работающими без отключения и с сохранением параметров работы, достигнут скорости света через ≈ 463 дня!!!
Я не уверен в правильности этих расчетов (да простят меня мои учителя!) однако что-то в этом есть. Акие двигатели требуют сборки пробных моделей, испытаний, замеров и более глубоких расчетов. Надеюсь что в скором времени я смогу все это осуществить. Если использовать такие двигатели на орбите, собранные в модули и особым образом настроенные, что я считаю, что хоть не для перемещения в пространстве, но хоть для ориентации на орбите земли – такие двигатели вполне подойдут.
Автор: Сергей Орлов
Внимание! Копирование, цитирование, использование на других ресурсах без указания автора и ссылки на источник запрещено!
konvenat.ru
| Реактивное и “безопорное” движения Электродинамические безопорные двигатели. 1. Введение Несмотря на то, что официальная наука считает, что безопорного движения не бывает, так как это нарушает 3-й закон Ньютона, время от времени этот вопрос снова поднимается, что связано с появлением механических и электродинамических устройств, в работе которых ряд автров усматривает элементы безопорного движения. Некоторые из них при более подробном рассмотрении оказываются вполне “опорными”, а вот принципы работы других позволяют предположить, что на их основе можно сделать движители не образующие реактивной струи и не расходующие рабочего тела. К ним можно отнести электродинамический конденсаторный движитель переменного тока, который подробно рассмотрен в данной статье. 2. Кратко о ракетных двигателях Вначале кратко остановимся на классических представителях реактивного движения – ракетных двигателях. Как известно, тяга ракетных двигателей может быть определена двумя путями:
 . Отсюда следует, что сила тяги двигателя равна . Отсюда следует, что сила тяги двигателя равна  , где V – скорость истечения газов, а , где V – скорость истечения газов, а  - массовый расход топлива. Эта формула справедлива для так называемого “рабочего режима”, когда внешнее давление и давление газов на срезе сопла равны. - массовый расход топлива. Эта формула справедлива для так называемого “рабочего режима”, когда внешнее давление и давление газов на срезе сопла равны.Во втором случае определяется интеграл сил давления, приложенных внутри и снаружи к камере сгорания. Возникновение тяги в данном случае можно проиллюстрировать следующим образом: Предположим, что некий баллон находится под давлением. В этом случае силы давления приложены равномерно по всей внутренней поверхности баллона. Баллон растянут, силы, приложенные к противоположным стенкам баллона скомпенсированы и баллон неподвижен. Проделаем отверстие в баллоне. В результате получается нескомпенсированная сила, равная давлению (избыточному) в баллоне умноженному на площадь отверстия. В ракетной технике эта сила называется “основной составляющей тяги”. Если давление в баллоне поддерживать каким-либо образом, то баллон будет работать как ракетный двигатель. Это рассуждение является, конечно, приближенным и не учитывает изменения статического давления газа за счет разгона потока, и тяга, при этом, получается больше чем “основная составляющая” примерно в 1,3 – 2 раза. Причем, тяга не зависит от топлива – это может быть все, что угодно: и горячие продукты горения и холодный сжатый газ, главное, чтобы поддерживалось давление в камере. То есть, выходит, что реактивная струя тут совсем не причем, она не создает тяги и тяга не является реакцией на движение струи. А вот поддержание давления требует непрерывной подачи топлива и его расход очень сильно зависит от его термодинамических характеристик, а термодинамические процессы расширения газа вызывают разгон струи. Таким образом, получается, что создание тяги и разгон струи – явления независимые, но связанные законами сохранения. Рассмотрим теперь действие электродинамических сил на контура с током. 3. Электродинамические движители 3. 1. Электроракетные двигатели Рассмотрим силы, приложенные к замкнутому контуру с током, находящемуся в однородном магнитном поле (полем, создаваемым контуром пренебрегаем).
Рис. 1 В таком контуре течет ток равный Поменяем направление внешнего магнитного поля – контур будет равномерно сжат и, все равно, останется неподвижен. Теперь, обрежем часть контура. Сопротивление возрастает до бесконечности и ток, соответственно, становится равным нулю. Поместим разомкнутые концы контура в проводящую жидкость или газ.
Рис. 2 Теперь контур снова замкнут, но через проводящую среду, никак механически не связанную с контуром. Ток, текущий в контуре определяется по той же формуле Очевидно, что силы Все это выглядит как реактивное движение и на этом принципе работают электроракетные двигатели. Но, если в случае газодинамического ракетного двигателя газ непосредственно контактирует с оболочкой камеры сгорания, обеспечивая тягу, то в данном случае механический контакт отсутствует и проводящая среда нужна только для пропускания тока и ее разгон никак не сказывается на силе, приложенной к контуру. В то же время проводящая среда разгоняется и безвозвратно улетает в противоположном направлении. Достать и сохранить ее не представляется возможным, так как в таком случае ее количество движения будет вычитаться из количества движения контура и в пределе (когда вся проводящая среда возвращается назад) система остановится. Таким образом, тягу в электроракетных двигателях создает не реактивная струя, а нескомпенсированная сила, приложенная к внутреннему электрическому контуру двигателя. Точно такая же сила приложена к проводящей среде и, таким образом, количества движения рамки и разогнанной среды оказываются равны, что формально выглядит как реактивное движение. Точно также работает униполярный мотор, крутящий и линейный.
Рис. 3 В данном случае проводящей средой, не связанной механически с контуром, является диск или пластина и одинаковые силы приложены и к диску (пластине) и к внешнему контуру, но в противоположных направлениях. Таким образом, диск вращается в одну сторону, а контур – в другую. Если закрепить контур, то будет вращаться один диск, а если закрепить диск то вращаться будет контур, что и подтверждено экспериментами. Следовательно, проводящая среда только замыкает контур, создавая условия для протекания в нем тока, а нескомпенсированная сила пропорциональна ширине зазора в контуре, в котором находится проводящая среда. Этот принцип используется в движителях по программе “Elecrodynamic Tether Propulsion”, где контур (20 км кабель) движется на орбите спутника в магнитном поле Земли, а проводящей средой является ионосфера. При протекании в контуре тока от внешнего источника, Tether разгоняет спутник, а, при замыкании контура на нагрузку, ЭДС, наведенная в контуре, вызывает ток, тормозящий спутник. Так как магнитное поле Земли – слабое (порядка 0.7 Гс), то и ощутимая сила достигается при ширине зазора в десятки километров. 3. 2. Безопорные электродинамические движители 3. 2. 1. Движители с внешним магнитным полем Как было отмечено выше, проводящая среда нужна только для замыкания контура. В контурах этих двигателей течет постоянный ток, который создает постоянную тягу. Если же пустить переменный ток, то контур будет двигаться взад и вперед с частотой тока, оставаясь на месте. В то же время, у переменного тока есть преимущество – он проходит через диэлектрики (за счет токов смещения), одним из которых является вакуум. В контуре, приведенном на Рис. 4 будет течь переменный ток.
Рис. 4 В данном случае (конденсатор С – вакуумный) переменный ток будет создавать переменную тягу с направлением, поочередно меняющимся на противоположное. В итоге, контур будет стоять на месте. Теперь зарядим конденсатор С постоянным током и поставим вместо генератора G переключатель sw. Теперь замкнем переключатель. Конденсатор будет разряжаться, в контуре потечет постоянный ток, который вызовет импульс силы направденный в одну сторону. При этом сила будет пропорциональна расстоянию между пластинами конденсатора L. За счет этого контур начнет двигаться. Теперь зарядим конденсатор. При зарядке конденсатора потечет постоянный ток, но направленный в противоположную сторону. Следовательно, при полном цикле зарядки-разрядки контур останется на месте. 3. 2. 2. Движители с внутренним магнитным полем Во всех приведенных случаях предпологалось, что контур находится в неком внешнем магнитном поле, а внутренне магнитное поле, вызванное протеканием тока в контуре мало, по сравнению с внешним. Теперь уберем внешний источник магнитного поля и рассмотрим силы, действующие на замкнутый контур с протекающим в нем переменным током.
Рис. 5 В этом случае при перемене направления тока одновременно меняется направление вектора индукции В и, таким образом, силы (сила Ампера), приложенные к контуру НЕ МЕНЯЮТ НАПРАВЛЕНИЯ. Таким образом, катушка с протекающим в ней переменным током всегда радиально растянута. Классическим примером является катушка трансформатора. Другим примером являются эксперименты по получению сильного импульсного магнитного поля, в которых на соленоид подается мощный импульс тока. В результате, в течении короткого времени наводится сильное магнитное поле, а соленоид, фактически, взрывается - разрывается возникшими силами Ампера. Возникающая в этом случае сила растяжения является переменной, с удвоенной частотой по сравнению с частотой тока. Теперь установим в контуре воздушный (вакуумный) конденсатор (см. рис. 6).
Рис. 6 Очевидно, что в этом случае на контур будет действовать нескомпенсированная сила, ПРИЛОЖЕННАЯ В ОДНОМ НАПРАВЛЕНИИ. А как же реактивное движение? В случае с проводящей средой она формально образует “реактивную струю”. А что образует “реактивную струю” в данном случае? Вакуум? Это что, выходит, что конденсатор разгоняет вакуум или эфир? Известно, что проводимость конденсатора обусловлена токами смещения в вакууме (эфире). Токи эти вполне реальные, создающие, в частности, магнитные поля. Что именно поляризуется в вакууме, современной физике не известно. В дорелятивистские же времена считали, что поляризуется эфир. Максвеллом была разработана модель эфира с деформируемыми вихрями, на основе которой он вывел свои уравнения (об этом современная физика старается не вспоминать). Так или иначе, вакуум (эфир) поляризуется и на этом основана вся электротехника, электроника и радиотехника.. Таким образом, устройство, приведенное на рис. 6 будет работать как безопорный двигатель, не тратящий на движение рабочее тело. Сила, приложенная к элементу контура определяется по уравнению: Кроме того, надо отметить, что если использовать конденсатор с твердым диэлектриком, скрепленным с пластинами конденсатора, то такой движитель работать не будет (в таком диэлектрике токи смещения создаются за счет смещения зарядов в диэлектрике и, следовательно, сила, приложенная к диэлектрику полностью скомпенсирует силу тяги контура). Оценим тягу, создаваемую таким движителем (Рис. 7).
Рис. 7 В первом приближении сила, приложенная к поперечному проводнику АВ определяется по формуле:
Получается, что при токе в 1 А тяга, развиваемая контуром приблизительно равна Приведенный расчет является грубым оценочным, но тем не менее позволяет оценить параметры такого движетеля, которые оказываются похожими на параметры электроракетных двигателей. Кроме того, необходимо помнить, что движитель, это только половина силового агрегата – двигателя, в который обязательно входит источник энергии. В химических двигателях топливо (продукты сгорания) является и источником энергии и обеспечивает движение, в то время, как у электроракетных двигателей эти функции разделены. Кстати, вышеприведенный физический механизм создания тяги несколько напоминает механизм светового давления. В этом случае электрическая составляющая электромагнитной волны вызывает ток в проводящей среде (металл), а взаимодействие этого тока с магнитной составляющей электромагнитной волны создает силу, приложенную к этой среде в направлении вектора скорости волны. При изменениии фазы волны на противоположную, фазу меняют одновременно обе компоненты и, таким образом, сила опять остается направленной вдоль вектора скорости волны. В диэлектрических средах вместо токов проводимости возникают токи смещения и результат получается такой же. Как электромагнитная волна “давит” на вакуум (эфир) и давит ли она вобще, современной физике это не известно.. 4. Заключение Многие случаи, являющиеся классическими примерами реактивного движения, на самом деле являются только видимостью реактивного движения. В этих случаях тяга создается нескомпенсированной силой, приложенной к оболочке двигателя или к электрическому контуру. Особенно это очевидно в случае электроракетных двигателей, где проводящая среда нужна только для замыкания электрического контура. Разновидностью такого двигателя является вакуумный конденсаторный двигатель переменного тока, где замыкание электрического контура достигается за счет токов смещения в вакууме. Такой двигатель (движитель) может считаться безопорным, не создающим реактивной струи, с нулевым расходом рабочего тела. В то же время характеристики такого двигателя близки к характеристикам электроракетных двигателей, а возможная тяга таких двигателей не превышает нескольких грамм. 5. Список литературы
|
koledj.ru
| Реактивное и “безопорное” движения Электродинамические безопорные двигатели.1. ВведениеНесмотря на то, что официальная наука считает, что безопорного движения не бывает, так как это нарушает 3-й закон Ньютона, время от времени этот вопрос снова поднимается, что связано с появлением механических и электродинамических устройств, в работе которых ряд автров усматривает элементы безопорного движения. Некоторые из них при более подробном рассмотрении оказываются вполне “опорными”, а вот принципы работы других позволяют предположить, что на их основе можно сделать движители не образующие реактивной струи и не расходующие рабочего тела. К ним можно отнести электродинамический конденсаторный движитель переменного тока, который подробно рассмотрен в данной статье.^ Вначале кратко остановимся на классических представителях реактивного движения – ракетных двигателях. Как известно, тяга ракетных двигателей может быть определена двумя путями:
 . Отсюда следует, что сила тяги двигателя равна . Отсюда следует, что сила тяги двигателя равна  , где V – скорость истечения газов, а , где V – скорость истечения газов, а  - массовый расход топлива. Эта формула справедлива для так называемого “рабочего режима”, когда внешнее давление и давление газов на срезе сопла равны. - массовый расход топлива. Эта формула справедлива для так называемого “рабочего режима”, когда внешнее давление и давление газов на срезе сопла равны.Во втором случае определяется интеграл сил давления, приложенных внутри и снаружи к камере сгорания. Возникновение тяги в данном случае можно проиллюстрировать следующим образом: Предположим, что некий баллон находится под давлением. В этом случае силы давления приложены равномерно по всей внутренней поверхности баллона. Баллон растянут, силы, приложенные к противоположным стенкам баллона скомпенсированы и баллон неподвижен. Проделаем отверстие в баллоне. В результате получается нескомпенсированная сила, равная давлению (избыточному) в баллоне умноженному на площадь отверстия. В ракетной технике эта сила называется “основной составляющей тяги”. Если давление в баллоне поддерживать каким-либо образом, то баллон будет работать как ракетный двигатель. Это рассуждение является, конечно, приближенным и не учитывает изменения статического давления газа за счет разгона потока, и тяга, при этом, получается больше чем “основная составляющая” примерно в 1,3 – 2 раза. Причем, тяга не зависит от топлива – это может быть все, что угодно: и горячие продукты горения и холодный сжатый газ, главное, чтобы поддерживалось давление в камере. То есть, выходит, что реактивная струя тут совсем не причем, она не создает тяги и тяга не является реакцией на движение струи. А вот поддержание давления требует непрерывной подачи топлива и его расход очень сильно зависит от его термодинамических характеристик, а термодинамические процессы расширения газа вызывают разгон струи. Таким образом, получается, что создание тяги и разгон струи – явления независимые, но связанные законами сохранения. Рассмотрим теперь действие электродинамических сил на контура с током. ^ 3. 1. Электроракетные двигатели Рассмотрим силы, приложенные к замкнутому контуру с током, находящемуся в однородном магнитном поле (полем, создаваемым контуром пренебрегаем).
Рис. 1В таком контуре течет ток равный Поменяем направление внешнего магнитного поля – контур будет равномерно сжат и, все равно, останется неподвижен. Теперь, обрежем часть контура. Сопротивление возрастает до бесконечности и ток, соответственно, становится равным нулю. Поместим разомкнутые концы контура в проводящую жидкость или газ.
Рис. 2 Теперь контур снова замкнут, но через проводящую среду, никак механически не связанную с контуром. Ток, текущий в контуре определяется по той же формуле Очевидно, что силы Все это выглядит как реактивное движение и на этом принципе работают электроракетные двигатели. Но, если в случае газодинамического ракетного двигателя газ непосредственно контактирует с оболочкой камеры сгорания, обеспечивая тягу, то в данном случае механический контакт отсутствует и проводящая среда нужна только для пропускания тока и ее разгон никак не сказывается на силе, приложенной к контуру. В то же время проводящая среда разгоняется и безвозвратно улетает в противоположном направлении. Достать и сохранить ее не представляется возможным, так как в таком случае ее количество движения будет вычитаться из количества движения контура и в пределе (когда вся проводящая среда возвращается назад) система остановится. Таким образом, тягу в электроракетных двигателях создает не реактивная струя, а нескомпенсированная сила, приложенная к внутреннему электрическому контуру двигателя. Точно такая же сила приложена к проводящей среде и, таким образом, количества движения рамки и разогнанной среды оказываются равны, что формально выглядит как реактивное движение. Точно также работает униполярный мотор, крутящий и линейный.
Рис. 3 В данном случае проводящей средой, не связанной механически с контуром, является диск или пластина и одинаковые силы приложены и к диску (пластине) и к внешнему контуру, но в противоположных направлениях. Таким образом, диск вращается в одну сторону, а контур – в другую. Если закрепить контур, то будет вращаться один диск, а если закрепить диск то вращаться будет контур, что и подтверждено экспериментами. Следовательно, проводящая среда только замыкает контур, создавая условия для протекания в нем тока, а нескомпенсированная сила пропорциональна ширине зазора в контуре, в котором находится проводящая среда. Этот принцип используется в движителях по программе “Elecrodynamic Tether Propulsion”, где контур (20 км кабель) движется на орбите спутника в магнитном поле Земли, а проводящей средой является ионосфера. При протекании в контуре тока от внешнего источника, Tether разгоняет спутник, а, при замыкании контура на нагрузку, ЭДС, наведенная в контуре, вызывает ток, тормозящий спутник. Так как магнитное поле Земли – слабое (порядка 0.7 Гс), то и ощутимая сила достигается при ширине зазора в десятки километров. ^ 3. 2. 1. Движители с внешним магнитным полем Как было отмечено выше, проводящая среда нужна только для замыкания контура. В контурах этих двигателей течет постоянный ток, который создает постоянную тягу. Если же пустить переменный ток, то контур будет двигаться взад и вперед с частотой тока, оставаясь на месте. В то же время, у переменного тока есть преимущество – он проходит через диэлектрики (за счет токов смещения), одним из которых является вакуум. В контуре, приведенном на Рис. 4 будет течь переменный ток.
Рис. 4 В данном случае (конденсатор С – вакуумный) переменный ток будет создавать переменную тягу с направлением, поочередно меняющимся на противоположное. В итоге, контур будет стоять на месте. Теперь зарядим конденсатор С постоянным током и поставим вместо генератора G переключатель sw. Теперь замкнем переключатель. Конденсатор будет разряжаться, в контуре потечет постоянный ток, который вызовет импульс силы направденный в одну сторону. При этом сила будет пропорциональна расстоянию между пластинами конденсатора L. За счет этого контур начнет двигаться. Теперь зарядим конденсатор. При зарядке конденсатора потечет постоянный ток, но направленный в противоположную сторону. Следовательно, при полном цикле зарядки-разрядки контур останется на месте. ^ Во всех приведенных случаях предпологалось, что контур находится в неком внешнем магнитном поле, а внутренне магнитное поле, вызванное протеканием тока в контуре мало, по сравнению с внешним. Теперь уберем внешний источник магнитного поля и рассмотрим силы, действующие на замкнутый контур с протекающим в нем переменным током.
Рис. 5В этом случае при перемене направления тока одновременно меняется направление вектора индукции В и, таким образом, силы (сила Ампера), приложенные к контуру НЕ МЕНЯЮТ НАПРАВЛЕНИЯ. Таким образом, катушка с протекающим в ней переменным током всегда радиально растянута. Классическим примером является катушка трансформатора. Другим примером являются эксперименты по получению сильного импульсного магнитного поля, в которых на соленоид подается мощный импульс тока. В результате, в течении короткого времени наводится сильное магнитное поле, а соленоид, фактически, взрывается - разрывается возникшими силами Ампера. Возникающая в этом случае сила растяжения является переменной, с удвоенной частотой по сравнению с частотой тока. Теперь установим в контуре воздушный (вакуумный) конденсатор (см. рис. 6).
Рис. 6 Очевидно, что в этом случае на контур будет действовать нескомпенсированная сила, ПРИЛОЖЕННАЯ В ОДНОМ НАПРАВЛЕНИИ. А как же реактивное движение? В случае с проводящей средой она формально образует “реактивную струю”. А что образует “реактивную струю” в данном случае? Вакуум? Это что, выходит, что конденсатор разгоняет вакуум или эфир? Известно, что проводимость конденсатора обусловлена токами смещения в вакууме (эфире). Токи эти вполне реальные, создающие, в частности, магнитные поля. Что именно поляризуется в вакууме, современной физике не известно. В дорелятивистские же времена считали, что поляризуется эфир. Максвеллом была разработана модель эфира с деформируемыми вихрями, на основе которой он вывел свои уравнения (об этом современная физика старается не вспоминать). Так или иначе, вакуум (эфир) поляризуется и на этом основана вся электротехника, электроника и радиотехника.. Таким образом, устройство, приведенное на рис. 6 будет работать как безопорный двигатель, не тратящий на движение рабочее тело. Сила, приложенная к элементу контура определяется по уравнению: Кроме того, надо отметить, что если использовать конденсатор с твердым диэлектриком, скрепленным с пластинами конденсатора, то такой движитель работать не будет (в таком диэлектрике токи смещения создаются за счет смещения зарядов в диэлектрике и, следовательно, сила, приложенная к диэлектрику полностью скомпенсирует силу тяги контура). Оценим тягу, создаваемую таким движителем (Рис. 7). Рис. 7В первом приближении сила, приложенная к поперечному проводнику АВ определяется по формуле:
Получается, что при токе в 1 А тяга, развиваемая контуром приблизительно равна Приведенный расчет является грубым оценочным, но тем не менее позволяет оценить параметры такого движетеля, которые оказываются похожими на параметры электроракетных двигателей. Кроме того, необходимо помнить, что движитель, это только половина силового агрегата – двигателя, в который обязательно входит источник энергии. В химических двигателях топливо (продукты сгорания) является и источником энергии и обеспечивает движение, в то время, как у электроракетных двигателей эти функции разделены. Кстати, вышеприведенный физический механизм создания тяги несколько напоминает механизм светового давления. В этом случае электрическая составляющая электромагнитной волны вызывает ток в проводящей среде (металл), а взаимодействие этого тока с магнитной составляющей электромагнитной волны создает силу, приложенную к этой среде в направлении вектора скорости волны. При изменениии фазы волны на противоположную, фазу меняют одновременно обе компоненты и, таким образом, сила опять остается направленной вдоль вектора скорости волны. В диэлектрических средах вместо токов проводимости возникают токи смещения и результат получается такой же. Как электромагнитная волна “давит” на вакуум (эфир) и давит ли она вобще, современной физике это не известно.. 4. ЗаключениеМногие случаи, являющиеся классическими примерами реактивного движения, на самом деле являются только видимостью реактивного движения. В этих случаях тяга создается нескомпенсированной силой, приложенной к оболочке двигателя или к электрическому контуру. Особенно это очевидно в случае электроракетных двигателей, где проводящая среда нужна только для замыкания электрического контура. Разновидностью такого двигателя является вакуумный конденсаторный двигатель переменного тока, где замыкание электрического контура достигается за счет токов смещения в вакууме. Такой двигатель (движитель) может считаться безопорным, не создающим реактивной струи, с нулевым расходом рабочего тела. В то же время характеристики такого двигателя близки к характеристикам электроракетных двигателей, а возможная тяга таких двигателей не превышает нескольких грамм. 5. Список литературы
|
exam-ans.ru
| Реактивное и “безопорное” движения Электродинамические безопорные двигатели.1. ВведениеНесмотря на то, что официальная наука считает, что безопорного движения не бывает, так как это нарушает 3-й закон Ньютона, время от времени этот вопрос снова поднимается, что связано с появлением механических и электродинамических устройств, в работе которых ряд автров усматривает элементы безопорного движения. Некоторые из них при более подробном рассмотрении оказываются вполне “опорными”, а вот принципы работы других позволяют предположить, что на их основе можно сделать движители не образующие реактивной струи и не расходующие рабочего тела. К ним можно отнести электродинамический конденсаторный движитель переменного тока, который подробно рассмотрен в данной статье.2. Кратко о ракетных двигателяхВначале кратко остановимся на классических представителях реактивного движения – ракетных двигателях. Как известно, тяга ракетных двигателей может быть определена двумя путями:
 . Отсюда следует, что сила тяги двигателя равна . Отсюда следует, что сила тяги двигателя равна  , где V – скорость истечения газов, а , где V – скорость истечения газов, а  - массовый расход топлива. Эта формула справедлива для так называемого “рабочего режима”, когда внешнее давление и давление газов на срезе сопла равны. - массовый расход топлива. Эта формула справедлива для так называемого “рабочего режима”, когда внешнее давление и давление газов на срезе сопла равны.Во втором случае определяется интеграл сил давления, приложенных внутри и снаружи к камере сгорания. Возникновение тяги в данном случае можно проиллюстрировать следующим образом: Предположим, что некий баллон находится под давлением. В этом случае силы давления приложены равномерно по всей внутренней поверхности баллона. Баллон растянут, силы, приложенные к противоположным стенкам баллона скомпенсированы и баллон неподвижен. Проделаем отверстие в баллоне. В результате получается нескомпенсированная сила, равная давлению (избыточному) в баллоне умноженному на площадь отверстия. В ракетной технике эта сила называется “основной составляющей тяги”. Если давление в баллоне поддерживать каким-либо образом, то баллон будет работать как ракетный двигатель. Это рассуждение является, конечно, приближенным и не учитывает изменения статического давления газа за счет разгона потока, и тяга, при этом, получается больше чем “основная составляющая” примерно в 1,3 – 2 раза. Причем, тяга не зависит от топлива – это может быть все, что угодно: и горячие продукты горения и холодный сжатый газ, главное, чтобы поддерживалось давление в камере. То есть, выходит, что реактивная струя тут совсем не причем, она не создает тяги и тяга не является реакцией на движение струи. А вот поддержание давления требует непрерывной подачи топлива и его расход очень сильно зависит от его термодинамических характеристик, а термодинамические процессы расширения газа вызывают разгон струи. Таким образом, получается, что создание тяги и разгон струи – явления независимые, но связанные законами сохранения. Рассмотрим теперь действие электродинамических сил на контура с током. 3. Электродинамические движители3. 1. Электроракетные двигатели Рассмотрим силы, приложенные к замкнутому контуру с током, находящемуся в однородном магнитном поле (полем, создаваемым контуром пренебрегаем).
Рис. 1В таком контуре течет ток равный Поменяем направление внешнего магнитного поля – контур будет равномерно сжат и, все равно, останется неподвижен. Теперь, обрежем часть контура. Сопротивление возрастает до бесконечности и ток, соответственно, становится равным нулю. Поместим разомкнутые концы контура в проводящую жидкость или газ.
Рис. 2 Теперь контур снова замкнут, но через проводящую среду, никак механически не связанную с контуром. Ток, текущий в контуре определяется по той же формуле Очевидно, что силы Все это выглядит как реактивное движение и на этом принципе работают электроракетные двигатели. Но, если в случае газодинамического ракетного двигателя газ непосредственно контактирует с оболочкой камеры сгорания, обеспечивая тягу, то в данном случае механический контакт отсутствует и проводящая среда нужна только для пропускания тока и ее разгон никак не сказывается на силе, приложенной к контуру. В то же время проводящая среда разгоняется и безвозвратно улетает в противоположном направлении. Достать и сохранить ее не представляется возможным, так как в таком случае ее количество движения будет вычитаться из количества движения контура и в пределе (когда вся проводящая среда возвращается назад) система остановится. Таким образом, тягу в электроракетных двигателях создает не реактивная струя, а нескомпенсированная сила, приложенная к внутреннему электрическому контуру двигателя. Точно такая же сила приложена к проводящей среде и, таким образом, количества движения рамки и разогнанной среды оказываются равны, что формально выглядит как реактивное движение. Точно также работает униполярный мотор, крутящий и линейный.
Рис. 3 В данном случае проводящей средой, не связанной механически с контуром, является диск или пластина и одинаковые силы приложены и к диску (пластине) и к внешнему контуру, но в противоположных направлениях. Таким образом, диск вращается в одну сторону, а контур – в другую. Если закрепить контур, то будет вращаться один диск, а если закрепить диск то вращаться будет контур, что и подтверждено экспериментами. Следовательно, проводящая среда только замыкает контур, создавая условия для протекания в нем тока, а нескомпенсированная сила пропорциональна ширине зазора в контуре, в котором находится проводящая среда. Этот принцип используется в движителях по программе “Elecrodynamic Tether Propulsion”, где контур (20 км кабель) движется на орбите спутника в магнитном поле Земли, а проводящей средой является ионосфера. При протекании в контуре тока от внешнего источника, Tether разгоняет спутник, а, при замыкании контура на нагрузку, ЭДС, наведенная в контуре, вызывает ток, тормозящий спутник. Так как магнитное поле Земли – слабое (порядка 0.7 Гс), то и ощутимая сила достигается при ширине зазора в десятки километров. 3. 2. Безопорные электродинамические движители3. 2. 1. Движители с внешним магнитным полем Как было отмечено выше, проводящая среда нужна только для замыкания контура. В контурах этих двигателей течет постоянный ток, который создает постоянную тягу. Если же пустить переменный ток, то контур будет двигаться взад и вперед с частотой тока, оставаясь на месте. В то же время, у переменного тока есть преимущество – он проходит через диэлектрики (за счет токов смещения), одним из которых является вакуум. В контуре, приведенном на Рис. 4 будет течь переменный ток.
Рис. 4 В данном случае (конденсатор С – вакуумный) переменный ток будет создавать переменную тягу с направлением, поочередно меняющимся на противоположное. В итоге, контур будет стоять на месте. Теперь зарядим конденсатор С постоянным током и поставим вместо генератора G переключатель sw. Теперь замкнем переключатель. Конденсатор будет разряжаться, в контуре потечет постоянный ток, который вызовет импульс силы направденный в одну сторону. При этом сила будет пропорциональна расстоянию между пластинами конденсатора L. За счет этого контур начнет двигаться. Теперь зарядим конденсатор. При зарядке конденсатора потечет постоянный ток, но направленный в противоположную сторону. Следовательно, при полном цикле зарядки-разрядки контур останется на месте. 3. 2. 2. Движители с внутренним магнитным полем Во всех приведенных случаях предпологалось, что контур находится в неком внешнем магнитном поле, а внутренне магнитное поле, вызванное протеканием тока в контуре мало, по сравнению с внешним. Теперь уберем внешний источник магнитного поля и рассмотрим силы, действующие на замкнутый контур с протекающим в нем переменным током.
Рис. 5В этом случае при перемене направления тока одновременно меняется направление вектора индукции В и, таким образом, силы (сила Ампера), приложенные к контуру НЕ МЕНЯЮТ НАПРАВЛЕНИЯ. Таким образом, катушка с протекающим в ней переменным током всегда радиально растянута. Классическим примером является катушка трансформатора. Другим примером являются эксперименты по получению сильного импульсного магнитного поля, в которых на соленоид подается мощный импульс тока. В результате, в течении короткого времени наводится сильное магнитное поле, а соленоид, фактически, взрывается - разрывается возникшими силами Ампера. Возникающая в этом случае сила растяжения является переменной, с удвоенной частотой по сравнению с частотой тока. Теперь установим в контуре воздушный (вакуумный) конденсатор (см. рис. 6).
Рис. 6 Очевидно, что в этом случае на контур будет действовать нескомпенсированная сила, ПРИЛОЖЕННАЯ В ОДНОМ НАПРАВЛЕНИИ. А как же реактивное движение? В случае с проводящей средой она формально образует “реактивную струю”. А что образует “реактивную струю” в данном случае? Вакуум? Это что, выходит, что конденсатор разгоняет вакуум или эфир? Известно, что проводимость конденсатора обусловлена токами смещения в вакууме (эфире). Токи эти вполне реальные, создающие, в частности, магнитные поля. Что именно поляризуется в вакууме, современной физике не известно. В дорелятивистские же времена считали, что поляризуется эфир. Максвеллом была разработана модель эфира с деформируемыми вихрями, на основе которой он вывел свои уравнения (об этом современная физика старается не вспоминать). Так или иначе, вакуум (эфир) поляризуется и на этом основана вся электротехника, электроника и радиотехника.. Таким образом, устройство, приведенное на рис. 6 будет работать как безопорный двигатель, не тратящий на движение рабочее тело. Сила, приложенная к элементу контура определяется по уравнению: Кроме того, надо отметить, что если использовать конденсатор с твердым диэлектриком, скрепленным с пластинами конденсатора, то такой движитель работать не будет (в таком диэлектрике токи смещения создаются за счет смещения зарядов в диэлектрике и, следовательно, сила, приложенная к диэлектрику полностью скомпенсирует силу тяги контура). Оценим тягу, создаваемую таким движителем (Рис. 7). Рис. 7В первом приближении сила, приложенная к поперечному проводнику АВ определяется по формуле:
Получается, что при токе в 1 А тяга, развиваемая контуром приблизительно равна Приведенный расчет является грубым оценочным, но тем не менее позволяет оценить параметры такого движетеля, которые оказываются похожими на параметры электроракетных двигателей. Кроме того, необходимо помнить, что движитель, это только половина силового агрегата – двигателя, в который обязательно входит источник энергии. В химических двигателях топливо (продукты сгорания) является и источником энергии и обеспечивает движение, в то время, как у электроракетных двигателей эти функции разделены. Кстати, вышеприведенный физический механизм создания тяги несколько напоминает механизм светового давления. В этом случае электрическая составляющая электромагнитной волны вызывает ток в проводящей среде (металл), а взаимодействие этого тока с магнитной составляющей электромагнитной волны создает силу, приложенную к этой среде в направлении вектора скорости волны. При изменениии фазы волны на противоположную, фазу меняют одновременно обе компоненты и, таким образом, сила опять остается направленной вдоль вектора скорости волны. В диэлектрических средах вместо токов проводимости возникают токи смещения и результат получается такой же. Как электромагнитная волна “давит” на вакуум (эфир) и давит ли она вобще, современной физике это не известно.. 4. ЗаключениеМногие случаи, являющиеся классическими примерами реактивного движения, на самом деле являются только видимостью реактивного движения. В этих случаях тяга создается нескомпенсированной силой, приложенной к оболочке двигателя или к электрическому контуру. Особенно это очевидно в случае электроракетных двигателей, где проводящая среда нужна только для замыкания электрического контура. Разновидностью такого двигателя является вакуумный конденсаторный двигатель переменного тока, где замыкание электрического контура достигается за счет токов смещения в вакууме. Такой двигатель (движитель) может считаться безопорным, не создающим реактивной струи, с нулевым расходом рабочего тела. В то же время характеристики такого двигателя близки к характеристикам электроракетных двигателей, а возможная тяга таких двигателей не превышает нескольких грамм. 5. Список литературы
|
5-bal.ru
Как известно, тяга ракетных двигателей может быть определена двумя путями:
 . Отсюда следует, что сила тяги двигателя равна
. Отсюда следует, что сила тяги двигателя равна  , где V – скорость истечения газов, а
, где V – скорость истечения газов, а  - массовый расход топлива. Эта формула справедлива для так называемого “рабочего режима”, когда внешнее давление и давление газов на срезе сопла равны.
- массовый расход топлива. Эта формула справедлива для так называемого “рабочего режима”, когда внешнее давление и давление газов на срезе сопла равны.Во втором случае определяется интеграл сил давления, приложенных внутри и снаружи к камере сгорания. Возникновение тяги в данном случае можно проиллюстрировать следующим образом:
Предположим, что некий баллон находится под давлением. В этом случае силы давления приложены равномерно по всей внутренней поверхности баллона. Баллон растянут, силы, приложенные к противоположным стенкам баллона скомпенсированы и баллон неподвижен. Проделаем отверстие в баллоне. В результате получается нескомпенсированная сила, равная давлению (избыточному) в баллоне умноженному на площадь отверстия. В ракетной технике эта сила называется “основной составляющей тяги”.
Если давление в баллоне поддерживать каким-либо образом, то баллон будет работать как ракетный двигатель. Это рассуждение является, конечно, приближенным и не учитывает изменения статического давления газа за счет разгона потока, и тяга, при этом, получается больше чем “основная составляющая” примерно в 1,3 – 2 раза. Причем, тяга не зависит от топлива – это может быть все, что угодно: и горячие продукты горения и холодный сжатый газ, главное, чтобы поддерживалось давление в камере. То есть, выходит, что реактивная струя тут совсем не причем, она не создает тяги и тяга не является реакцией на движение струи. А вот поддержание давления требует непрерывной подачи топлива и его расход очень сильно зависит от его термодинамических характеристик, а термодинамические процессы расширения газа вызывают разгон струи. Таким образом, получается, что создание тяги и разгон струи – явления независимые, но связанные законами сохранения.
Рассмотрим теперь действие электродинамических сил на контура с током.
3. Электродинамические движители3. 1. Электроракетные двигатели
Рассмотрим силы, приложенные к замкнутому контуру с током, находящемуся в однородном магнитном поле (полем, создаваемым контуром пренебрегаем).

Рис. 1
В таком контуре течет ток равный , где
, где  - сопротивление контура,
- сопротивление контура,  - внутренне сопротивление источника . Очевидно, что в данном случае контур равномерно растянут, силы скомпенсированы и, следовательно, контур неподвижен. При этом сила, приложенная к элементу проводника
- внутренне сопротивление источника . Очевидно, что в данном случае контур равномерно растянут, силы скомпенсированы и, следовательно, контур неподвижен. При этом сила, приложенная к элементу проводника  определяется по формуле:
определяется по формуле:  (
( ).
). Поменяем направление внешнего магнитного поля – контур будет равномерно сжат и, все равно, останется неподвижен.
Теперь, обрежем часть контура. Сопротивление возрастает до бесконечности и ток, соответственно, становится равным нулю. Поместим разомкнутые концы контура в проводящую жидкость или газ.

Рис. 2
Теперь контур снова замкнут, но через проводящую среду, никак механически не связанную с контуром. Ток, текущий в контуре определяется по той же формуле , где зависит от сопротивления проводящей среды.
 и
и  , приложенные к боковым проводникам компенсируют друг друга. В то же время, силы
, приложенные к боковым проводникам компенсируют друг друга. В то же время, силы  и
и  , равные по величине, приложены в противоположных направлениях к переднему проводнику и к проводящей жидкости. Так как проводящая жидкость или газ механически не связаны с контуром, то эти силы не скомпенсирваны – сила приложена к контуру, а сила - к жидкости (газу). Таким образом, контур разгоняется в одном направлении, а жидкость (газ) в противоположном. Силы и определяются по формуле:
, равные по величине, приложены в противоположных направлениях к переднему проводнику и к проводящей жидкости. Так как проводящая жидкость или газ механически не связаны с контуром, то эти силы не скомпенсирваны – сила приложена к контуру, а сила - к жидкости (газу). Таким образом, контур разгоняется в одном направлении, а жидкость (газ) в противоположном. Силы и определяются по формуле:  , где L – длина пути тока в жидкости (газе).
, где L – длина пути тока в жидкости (газе). Все это выглядит как реактивное движение и на этом принципе работают электроракетные двигатели. Но, если в случае газодинамического ракетного двигателя газ непосредственно контактирует с оболочкой камеры сгорания, обеспечивая тягу, то в данном случае механический контакт отсутствует и проводящая среда нужна только для пропускания тока и ее разгон никак не сказывается на силе, приложенной к контуру. В то же время проводящая среда разгоняется и безвозвратно улетает в противоположном направлении. Достать и сохранить ее не представляется возможным, так как в таком случае ее количество движения будет вычитаться из количества движения контура и в пределе (когда вся проводящая среда возвращается назад) система остановится.
Таким образом, тягу в электроракетных двигателях создает не реактивная струя, а нескомпенсированная сила, приложенная к внутреннему электрическому контуру двигателя. Точно такая же сила приложена к проводящей среде и, таким образом, количества движения рамки и разогнанной среды оказываются равны, что формально выглядит как реактивное движение.
Точно также работает униполярный мотор, крутящий и линейный.

Рис. 3
В данном случае проводящей средой, не связанной механически с контуром, является диск или пластина и одинаковые силы приложены и к диску (пластине) и к внешнему контуру, но в противоположных направлениях. Таким образом, диск вращается в одну сторону, а контур – в другую. Если закрепить контур, то будет вращаться один диск, а если закрепить диск то вращаться будет контур, что и подтверждено экспериментами.
Следовательно, проводящая среда только замыкает контур, создавая условия для протекания в нем тока, а нескомпенсированная сила пропорциональна ширине зазора в контуре, в котором находится проводящая среда.
Этот принцип используется в движителях по программе “Elecrodynamic Tether Propulsion”, где контур (20 км кабель) движется на орбите спутника в магнитном поле Земли, а проводящей средой является ионосфера. При протекании в контуре тока от внешнего источника, Tether разгоняет спутник, а, при замыкании контура на нагрузку, ЭДС, наведенная в контуре, вызывает ток, тормозящий спутник. Так как магнитное поле Земли – слабое (порядка 0.7 Гс), то и ощутимая сила достигается при ширине зазора в десятки километров.3. 2. Безопорные электродинамические движители3. 2. 1. Движители с внешним магнитным полем
Как было отмечено выше, проводящая среда нужна только для замыкания контура.
В контурах этих двигателей течет постоянный ток, который создает постоянную тягу. Если же пустить переменный ток, то контур будет двигаться взад и вперед с частотой тока, оставаясь на месте.
В то же время, у переменного тока есть преимущество – он проходит через диэлектрики (за счет токов смещения), одним из которых является вакуум. В контуре, приведенном на Рис. 4 будет течь переменный ток.

Рис. 4
В данном случае (конденсатор С – вакуумный) переменный ток будет создавать переменную тягу с направлением, поочередно меняющимся на противоположное. В итоге, контур будет стоять на месте.
Теперь зарядим конденсатор С постоянным током и поставим вместо генератора G переключатель sw. Теперь замкнем переключатель. Конденсатор будет разряжаться, в контуре потечет постоянный ток, который вызовет импульс силы направденный в одну сторону. При этом сила будет пропорциональна расстоянию между пластинами конденсатора L. За счет этого контур начнет двигаться.
Теперь зарядим конденсатор. При зарядке конденсатора потечет постоянный ток, но направленный в противоположную сторону. Следовательно, при полном цикле зарядки-разрядки контур останется на месте.
3. 2. 2. Движители с внутренним магнитным полем
Во всех приведенных случаях предпологалось, что контур находится в неком внешнем магнитном поле, а внутренне магнитное поле, вызванное протеканием тока в контуре мало, по сравнению с внешним.
Теперь уберем внешний источник магнитного поля и рассмотрим силы, действующие на замкнутый контур с протекающим в нем переменным током.

Рис. 5 В этом случае при перемене направления тока одновременно меняется направление вектора индукции В и, таким образом, силы (сила Ампера), приложенные к контуру НЕ МЕНЯЮТ НАПРАВЛЕНИЯ.
Таким образом, катушка с протекающим в ней переменным током всегда радиально растянута. Классическим примером является катушка трансформатора. Другим примером являются эксперименты по получению сильного импульсного магнитного поля, в которых на соленоид подается мощный импульс тока. В результате, в течении короткого времени наводится сильное магнитное поле, а соленоид, фактически, взрывается - разрывается возникшими силами Ампера.
Возникающая в этом случае сила растяжения является переменной, с удвоенной частотой по сравнению с частотой тока.
Теперь установим в контуре воздушный (вакуумный) конденсатор (см. рис. 6).

Рис. 6
Очевидно, что в этом случае на контур будет действовать нескомпенсированная сила, ПРИЛОЖЕННАЯ В ОДНОМ НАПРАВЛЕНИИ. А как же реактивное движение? В случае с проводящей средой она формально образует “реактивную струю”. А что образует “реактивную струю” в данном случае? Вакуум? Это что, выходит, что конденсатор разгоняет вакуум или эфир?
Известно, что проводимость конденсатора обусловлена токами смещения в вакууме (эфире). Токи эти вполне реальные, создающие, в частности, магнитные поля. Что именно поляризуется в вакууме, современной физике не известно. В дорелятивистские же времена считали, что поляризуется эфир. Максвеллом была разработана модель эфира с деформируемыми вихрями, на основе которой он вывел свои уравнения (об этом современная физика старается не вспоминать). Так или иначе, вакуум (эфир) поляризуется и на этом основана вся электротехника, электроника и радиотехника..
Таким образом, устройство, приведенное на рис. 6 будет работать как безопорный двигатель, не тратящий на движение рабочее тело. Сила, приложенная к элементу контура определяется по уравнению: . В первом приближении сила, приложенная к контуру будет равна
. В первом приближении сила, приложенная к контуру будет равна  , где L – расстояние между пластинами конденсатора, I - ток в контуре, B – магнитная индукция – следствие протекания тока в контуре. Величина магнитной индукции может быть определена интегрированием уравнения Био-Савара, при этом магнитное поле определяется согласно принципу суперпозиции полей всеми проводниками, входящими в контур, включая боковые. Ток, протекающий в контуре, зависит от напряжения источника переменного тока и сопротивления конденсатора, определяемого по формуле:
, где L – расстояние между пластинами конденсатора, I - ток в контуре, B – магнитная индукция – следствие протекания тока в контуре. Величина магнитной индукции может быть определена интегрированием уравнения Био-Савара, при этом магнитное поле определяется согласно принципу суперпозиции полей всеми проводниками, входящими в контур, включая боковые. Ток, протекающий в контуре, зависит от напряжения источника переменного тока и сопротивления конденсатора, определяемого по формуле:  , где f – частота тока. Очевидно, что эффективность (тяга) двигателя возрастает с частотой, но в случае, когда длина волны в проводнике (
, где f – частота тока. Очевидно, что эффективность (тяга) двигателя возрастает с частотой, но в случае, когда длина волны в проводнике ( , где с – скорость света) соизмерима с размером контура, эффективность двигателя может упасть.
, где с – скорость света) соизмерима с размером контура, эффективность двигателя может упасть. Кроме того, надо отметить, что если использовать конденсатор с твердым диэлектриком, скрепленным с пластинами конденсатора, то такой движитель работать не будет (в таком диэлектрике токи смещения создаются за счет смещения зарядов в диэлектрике и, следовательно, сила, приложенная к диэлектрику полностью скомпенсирует силу тяги контура).
Оценим тягу, создаваемую таким движителем (Рис. 7). 
Рис. 7 В первом приближении сила, приложенная к поперечному проводнику АВ определяется по формуле:
 , где
, где  – ток, текущий в контуре, х и b – размеры контура, r – радиус проводника контура. При этом, магнитное поле, приложенное к проводнику AB, создается током, текущим в проводинках ВС и AD.
– ток, текущий в контуре, х и b – размеры контура, r – радиус проводника контура. При этом, магнитное поле, приложенное к проводнику AB, создается током, текущим в проводинках ВС и AD.
Получается, что при токе в 1 А тяга, развиваемая контуром приблизительно равна  Н, а при токе в 30 А тяга будет составлять порядка
Н, а при токе в 30 А тяга будет составлять порядка  Н или 1.5 грамма силы. Емкость воздушного конденсатора, приведенного на рис. 7, составит порядка 90 пФ, и его емкостное сопротивление составит порядка 200 Ом на частоте 10 МГц. То есть, для получения тока в 30 А, напряжение источника переменного тока должно быть порядка 6000 В.
Н или 1.5 грамма силы. Емкость воздушного конденсатора, приведенного на рис. 7, составит порядка 90 пФ, и его емкостное сопротивление составит порядка 200 Ом на частоте 10 МГц. То есть, для получения тока в 30 А, напряжение источника переменного тока должно быть порядка 6000 В.
Приведенный расчет является грубым оценочным, но тем не менее позволяет оценить параметры такого движетеля, которые оказываются похожими на параметры электроракетных двигателей.
Кроме того, необходимо помнить, что движитель, это только половина силового агрегата – двигателя, в который обязательно входит источник энергии. В химических двигателях топливо (продукты сгорания) является и источником энергии и обеспечивает движение, в то время, как у электроракетных двигателей эти функции разделены.Кстати, вышеприведенный физический механизм создания тяги несколько напоминает механизм светового давления. В этом случае электрическая составляющая электромагнитной волны вызывает ток в проводящей среде (металл), а взаимодействие этого тока с магнитной составляющей электромагнитной волны создает силу, приложенную к этой среде в направлении вектора скорости волны. При изменениии фазы волны на противоположную, фазу меняют одновременно обе компоненты и, таким образом, сила опять остается направленной вдоль вектора скорости волны. В диэлектрических средах вместо токов проводимости возникают токи смещения и результат получается такой же. Как электромагнитная волна “давит” на вакуум (эфир) и давит ли она вобще, современной физике это не известно.. 4. Заключение Многие случаи, являющиеся классическими примерами реактивного движения, на самом деле являются только видимостью реактивного движения. В этих случаях тяга создается нескомпенсированной силой, приложенной к оболочке двигателя или к электрическому контуру. Особенно это очевидно в случае электроракетных двигателей, где проводящая среда нужна только для замыкания электрического контура. Разновидностью такого двигателя является вакуумный конденсаторный двигатель переменного тока, где замыкание электрического контура достигается за счет токов смещения в вакууме. Такой двигатель (движитель) может считаться безопорным, не создающим реактивной струи, с нулевым расходом рабочего тела. В то же время характеристики такого двигателя близки к характеристикам электроракетных двигателей, а возможная тяга таких двигателей не превышает нескольких грамм. 5. Список литературы
birmaga.ru
 , где m{\displaystyle m}
, где m{\displaystyle m} - масса грузика с пружиной на инерцоиде, Δv{\displaystyle \Delta v}
- масса грузика с пружиной на инерцоиде, Δv{\displaystyle \Delta v} - приобретаемая им скорость, F{\displaystyle F}
- приобретаемая им скорость, F{\displaystyle F} - сила для ускорения грузика на пружине, по третьему закону Ньютона, равная силе действия грузика на инерцоид, Δt{\displaystyle \Delta t}
- сила для ускорения грузика на пружине, по третьему закону Ньютона, равная силе действия грузика на инерцоид, Δt{\displaystyle \Delta t} - время ускорения грузика на пружине в одном направлении. Если величина импульса mΔv{\displaystyle m\Delta v}
- время ускорения грузика на пружине в одном направлении. Если величина импульса mΔv{\displaystyle m\Delta v} равна по абсолютной величине для прямого и обратного направления ускорения грузика, то F{\displaystyle F}
равна по абсолютной величине для прямого и обратного направления ускорения грузика, то F{\displaystyle F}
 , где
, где  - сопротивление контура,
- сопротивление контура,  - внутренне сопротивление источника . Очевидно, что в данном случае контур равномерно растянут, силы скомпенсированы и, следовательно, контур неподвижен. При этом сила, приложенная к элементу проводника
- внутренне сопротивление источника . Очевидно, что в данном случае контур равномерно растянут, силы скомпенсированы и, следовательно, контур неподвижен. При этом сила, приложенная к элементу проводника  определяется по формуле:
определяется по формуле:  (
( ).
). 
 и
и  , приложенные к боковым проводникам компенсируют друг друга. В то же время, силы
, приложенные к боковым проводникам компенсируют друг друга. В то же время, силы  и
и  , равные по величине, приложены в противоположных направлениях к переднему проводнику и к проводящей жидкости. Так как проводящая жидкость или газ механически не связаны с контуром, то эти силы не скомпенсирваны – сила
, равные по величине, приложены в противоположных направлениях к переднему проводнику и к проводящей жидкости. Так как проводящая жидкость или газ механически не связаны с контуром, то эти силы не скомпенсирваны – сила  , где L – длина пути тока в жидкости (газе).
, где L – длина пути тока в жидкости (газе). 



 . В первом приближении сила, приложенная к контуру будет равна
. В первом приближении сила, приложенная к контуру будет равна  , где L – расстояние между пластинами конденсатора, I - ток в контуре, B – магнитная индукция – следствие протекания тока в контуре. Величина магнитной индукции может быть определена интегрированием уравнения Био-Савара, при этом магнитное поле определяется согласно принципу суперпозиции полей всеми проводниками, входящими в контур, включая боковые. Ток, протекающий в контуре, зависит от напряжения источника переменного тока и сопротивления конденсатора, определяемого по формуле:
, где L – расстояние между пластинами конденсатора, I - ток в контуре, B – магнитная индукция – следствие протекания тока в контуре. Величина магнитной индукции может быть определена интегрированием уравнения Био-Савара, при этом магнитное поле определяется согласно принципу суперпозиции полей всеми проводниками, входящими в контур, включая боковые. Ток, протекающий в контуре, зависит от напряжения источника переменного тока и сопротивления конденсатора, определяемого по формуле:  , где f – частота тока. Очевидно, что эффективность (тяга) двигателя возрастает с частотой, но в случае, когда длина волны в проводнике (
, где f – частота тока. Очевидно, что эффективность (тяга) двигателя возрастает с частотой, но в случае, когда длина волны в проводнике ( , где с – скорость света) соизмерима с размером контура, эффективность двигателя может упасть.
, где с – скорость света) соизмерима с размером контура, эффективность двигателя может упасть. 
 , где
, где  – ток, текущий в контуре, х и b – размеры контура, r – радиус проводника контура. При этом, магнитное поле, приложенное к проводнику AB, создается током, текущим в проводинках ВС и AD.
– ток, текущий в контуре, х и b – размеры контура, r – радиус проводника контура. При этом, магнитное поле, приложенное к проводнику AB, создается током, текущим в проводинках ВС и AD. Н, а при токе в 30 А тяга будет составлять порядка
Н, а при токе в 30 А тяга будет составлять порядка  Н или 1.5 грамма силы. Емкость воздушного конденсатора, приведенного на рис. 7, составит порядка 90 пФ, и его емкостное сопротивление составит порядка 200 Ом на частоте 10 МГц. То есть, для получения тока в 30 А, напряжение источника переменного тока должно быть порядка 6000 В.
Н или 1.5 грамма силы. Емкость воздушного конденсатора, приведенного на рис. 7, составит порядка 90 пФ, и его емкостное сопротивление составит порядка 200 Ом на частоте 10 МГц. То есть, для получения тока в 30 А, напряжение источника переменного тока должно быть порядка 6000 В. 
 , где
, где  - сопротивление контура,
- сопротивление контура,  - внутренне сопротивление источника . Очевидно, что в данном случае контур равномерно растянут, силы скомпенсированы и, следовательно, контур неподвижен. При этом сила, приложенная к элементу проводника
- внутренне сопротивление источника . Очевидно, что в данном случае контур равномерно растянут, силы скомпенсированы и, следовательно, контур неподвижен. При этом сила, приложенная к элементу проводника  определяется по формуле:
определяется по формуле:  (
( ).
). 
 и
и  , приложенные к боковым проводникам компенсируют друг друга. В то же время, силы
, приложенные к боковым проводникам компенсируют друг друга. В то же время, силы  и
и  , равные по величине, приложены в противоположных направлениях к переднему проводнику и к проводящей жидкости. Так как проводящая жидкость или газ механически не связаны с контуром, то эти силы не скомпенсирваны – сила
, равные по величине, приложены в противоположных направлениях к переднему проводнику и к проводящей жидкости. Так как проводящая жидкость или газ механически не связаны с контуром, то эти силы не скомпенсирваны – сила  , где L – длина пути тока в жидкости (газе).
, где L – длина пути тока в жидкости (газе). 



 . В первом приближении сила, приложенная к контуру будет равна
. В первом приближении сила, приложенная к контуру будет равна  , где L – расстояние между пластинами конденсатора, I - ток в контуре, B – магнитная индукция – следствие протекания тока в контуре. Величина магнитной индукции может быть определена интегрированием уравнения Био-Савара, при этом магнитное поле определяется согласно принципу суперпозиции полей всеми проводниками, входящими в контур, включая боковые. Ток, протекающий в контуре, зависит от напряжения источника переменного тока и сопротивления конденсатора, определяемого по формуле:
, где L – расстояние между пластинами конденсатора, I - ток в контуре, B – магнитная индукция – следствие протекания тока в контуре. Величина магнитной индукции может быть определена интегрированием уравнения Био-Савара, при этом магнитное поле определяется согласно принципу суперпозиции полей всеми проводниками, входящими в контур, включая боковые. Ток, протекающий в контуре, зависит от напряжения источника переменного тока и сопротивления конденсатора, определяемого по формуле:  , где f – частота тока. Очевидно, что эффективность (тяга) двигателя возрастает с частотой, но в случае, когда длина волны в проводнике (
, где f – частота тока. Очевидно, что эффективность (тяга) двигателя возрастает с частотой, но в случае, когда длина волны в проводнике ( , где с – скорость света) соизмерима с размером контура, эффективность двигателя может упасть.
, где с – скорость света) соизмерима с размером контура, эффективность двигателя может упасть. 
 , где
, где  – ток, текущий в контуре, х и b – размеры контура, r – радиус проводника контура. При этом, магнитное поле, приложенное к проводнику AB, создается током, текущим в проводинках ВС и AD.
– ток, текущий в контуре, х и b – размеры контура, r – радиус проводника контура. При этом, магнитное поле, приложенное к проводнику AB, создается током, текущим в проводинках ВС и AD. Н, а при токе в 30 А тяга будет составлять порядка
Н, а при токе в 30 А тяга будет составлять порядка  Н или 1.5 грамма силы. Емкость воздушного конденсатора, приведенного на рис. 7, составит порядка 90 пФ, и его емкостное сопротивление составит порядка 200 Ом на частоте 10 МГц. То есть, для получения тока в 30 А, напряжение источника переменного тока должно быть порядка 6000 В.
Н или 1.5 грамма силы. Емкость воздушного конденсатора, приведенного на рис. 7, составит порядка 90 пФ, и его емкостное сопротивление составит порядка 200 Ом на частоте 10 МГц. То есть, для получения тока в 30 А, напряжение источника переменного тока должно быть порядка 6000 В. 
 , где
, где  - сопротивление контура,
- сопротивление контура,  - внутренне сопротивление источника . Очевидно, что в данном случае контур равномерно растянут, силы скомпенсированы и, следовательно, контур неподвижен. При этом сила, приложенная к элементу проводника
- внутренне сопротивление источника . Очевидно, что в данном случае контур равномерно растянут, силы скомпенсированы и, следовательно, контур неподвижен. При этом сила, приложенная к элементу проводника  определяется по формуле:
определяется по формуле:  (
( ).
). 
 и
и  , приложенные к боковым проводникам компенсируют друг друга. В то же время, силы
, приложенные к боковым проводникам компенсируют друг друга. В то же время, силы  и
и  , равные по величине, приложены в противоположных направлениях к переднему проводнику и к проводящей жидкости. Так как проводящая жидкость или газ механически не связаны с контуром, то эти силы не скомпенсирваны – сила
, равные по величине, приложены в противоположных направлениях к переднему проводнику и к проводящей жидкости. Так как проводящая жидкость или газ механически не связаны с контуром, то эти силы не скомпенсирваны – сила  , где L – длина пути тока в жидкости (газе).
, где L – длина пути тока в жидкости (газе). 



 . В первом приближении сила, приложенная к контуру будет равна
. В первом приближении сила, приложенная к контуру будет равна  , где L – расстояние между пластинами конденсатора, I - ток в контуре, B – магнитная индукция – следствие протекания тока в контуре. Величина магнитной индукции может быть определена интегрированием уравнения Био-Савара, при этом магнитное поле определяется согласно принципу суперпозиции полей всеми проводниками, входящими в контур, включая боковые. Ток, протекающий в контуре, зависит от напряжения источника переменного тока и сопротивления конденсатора, определяемого по формуле:
, где L – расстояние между пластинами конденсатора, I - ток в контуре, B – магнитная индукция – следствие протекания тока в контуре. Величина магнитной индукции может быть определена интегрированием уравнения Био-Савара, при этом магнитное поле определяется согласно принципу суперпозиции полей всеми проводниками, входящими в контур, включая боковые. Ток, протекающий в контуре, зависит от напряжения источника переменного тока и сопротивления конденсатора, определяемого по формуле:  , где f – частота тока. Очевидно, что эффективность (тяга) двигателя возрастает с частотой, но в случае, когда длина волны в проводнике (
, где f – частота тока. Очевидно, что эффективность (тяга) двигателя возрастает с частотой, но в случае, когда длина волны в проводнике ( , где с – скорость света) соизмерима с размером контура, эффективность двигателя может упасть.
, где с – скорость света) соизмерима с размером контура, эффективность двигателя может упасть. 
 , где
, где  – ток, текущий в контуре, х и b – размеры контура, r – радиус проводника контура. При этом, магнитное поле, приложенное к проводнику AB, создается током, текущим в проводинках ВС и AD.
– ток, текущий в контуре, х и b – размеры контура, r – радиус проводника контура. При этом, магнитное поле, приложенное к проводнику AB, создается током, текущим в проводинках ВС и AD. Н, а при токе в 30 А тяга будет составлять порядка
Н, а при токе в 30 А тяга будет составлять порядка  Н или 1.5 грамма силы. Емкость воздушного конденсатора, приведенного на рис. 7, составит порядка 90 пФ, и его емкостное сопротивление составит порядка 200 Ом на частоте 10 МГц. То есть, для получения тока в 30 А, напряжение источника переменного тока должно быть порядка 6000 В.
Н или 1.5 грамма силы. Емкость воздушного конденсатора, приведенного на рис. 7, составит порядка 90 пФ, и его емкостное сопротивление составит порядка 200 Ом на частоте 10 МГц. То есть, для получения тока в 30 А, напряжение источника переменного тока должно быть порядка 6000 В.