Между обмотками статора и ротора асинхронной машины существует только магнитная связь. В этом отношении асинхронная машина аналогична трансформатору: обмотка статора является первичной, а обмотка ротора – вторичной.
Основной магнитный поток  , вращающийся с частотой
, вращающийся с частотой , наводит в неподвижной обмотке статора ЭДС (при синусоидальной индукции в зазоре):
, наводит в неподвижной обмотке статора ЭДС (при синусоидальной индукции в зазоре):
 , где
, где  – частота ЭДС статора, Гц;
– частота ЭДС статора, Гц; – число витков одной фазы статора;
– число витков одной фазы статора; – обмоточный коэффициент фазы обмотки статора.
– обмоточный коэффициент фазы обмотки статора.
Магнитный поток рассеяния  наводит в обмотке статора ЭДС рассеяния:
наводит в обмотке статора ЭДС рассеяния:
 .
.
Уравнение напряжений обмотки статора выражается по второму закону Кирхгофа:
 , где
, где  –сопротивление фазы статора.
–сопротивление фазы статора.
Уравнение напряжений обмотки статора не отличается от уравнения напряжения для первичной обмотки трансформатора.
Ротор при работе асинхронной машины в двигательном режиме вращается в сторону вращения поля статора с частотой  . Основной магнитный поток Ф, обгоняет ротор с частотой вращения
. Основной магнитный поток Ф, обгоняет ротор с частотой вращения
 и наводит в обмотке ротора ЭДС
и наводит в обмотке ротора ЭДС
 , где
, где  – частота ЭДС
– частота ЭДС в роторе, Гц;
в роторе, Гц; – число витков одной фазы ротора;
– число витков одной фазы ротора; – обмоточный коэффициент фазы обмотки статора.
– обмоточный коэффициент фазы обмотки статора.
Частота ЭДС (тока) в обмотке вращающегося ротора
 . Эта частота пропорциональна скольжению
. Эта частота пропорциональна скольжению  и в номинальном режиме работы не превышает нескольких герц. В то же время частота токов ротора относительно неподвижного статора
и в номинальном режиме работы не превышает нескольких герц. В то же время частота токов ротора относительно неподвижного статора всегда постоянна и равна частоте токов статора
всегда постоянна и равна частоте токов статора .
.
ЭДС вращающегося ротора  можно представить через ЭДС неподвижного ротора
можно представить через ЭДС неподвижного ротора :
:
 .
.
Магнитный поток рассеяния  наводит в обмотке ротора ЭДС рассеяния:
наводит в обмотке ротора ЭДС рассеяния:
 , где
, где  – индуктивное сопротивление рассеяния обмотки вращающегося ротора, Ом.
– индуктивное сопротивление рассеяния обмотки вращающегося ротора, Ом.
Обмотка ротора асинхронного двигателя электрически не связана с внешней сетью, ток в ней появляется только за счет ЭДС, наведенной основным магнитным потоком Ф. Уравнение напряжений обмотки ротора:
 .
.
Уравнения электрических цепей машины исчерпывающим образом описывают происходящие в ней процессы. Однако в этих уравнениях величины роторных цепей изменяются с иной частотой, чем величины статорных цепей, что мешает распространению на асинхронную машину теории трансформатора, в котором величины в первичной и вторичной обмотках изменяются с одной и той же частотой. Устранить это неудобство позволяет замена вращающегося ротора эквивалентным неподвижным. Разделив уравнение напряжений ротора на скольжение  и заменив
и заменив , получим
, получим
 , где
, где – составляющая сопротивления фазы обмотки ротора, зависящая от скольжения.
– составляющая сопротивления фазы обмотки ротора, зависящая от скольжения.
Таким образом, асинхронный двигатель в электрическом отношении подобен трансформатору, работающему на чисто активную нагрузку  .
.
МДС ротора  (амплитуда) вращается относительно статора с той же частотой
(амплитуда) вращается относительно статора с той же частотой , что и МДС статора
, что и МДС статора . Взаимное расположение МДС статора
. Взаимное расположение МДС статора и ротора
и ротора в установившемся режиме все время сохраняется, поэтомурезультирующая МДС
в установившемся режиме все время сохраняется, поэтомурезультирующая МДС  имеет в каждом режиме вполне определенную амплитуду, вращается с частотой
имеет в каждом режиме вполне определенную амплитуду, вращается с частотой относительно статора. Уравнение МДС
относительно статора. Уравнение МДС
 , где
, где ,
, ,
, .
.
В любом режиме работы асинхронной машины одинаковой результирующей МДС  будут соответствовать одинаковые поля и потоки взаимной индукции.
будут соответствовать одинаковые поля и потоки взаимной индукции.
При изменениях нагрузки на валу двигателя меняется ток в статоре  и роторе
и роторе . Но основной магнитный поток
. Но основной магнитный поток при этом сохраняется неизменным (
при этом сохраняется неизменным ( ), так как напряжение, подведенное к обмотке статора, неизменно (
), так как напряжение, подведенное к обмотке статора, неизменно ( ) и почти полностью уравновешивается ЭДС
) и почти полностью уравновешивается ЭДС обмотки статора, пропорциональной основному потоку
обмотки статора, пропорциональной основному потоку :
:
 . Поэтому результирующая МДС
. Поэтому результирующая МДС , создающая основной поток
, создающая основной поток , остается почти постоянной при нагрузке машины не выше номинальной:
, остается почти постоянной при нагрузке машины не выше номинальной:
 . Следовательно, поток взаимной индукции
. Следовательно, поток взаимной индукции  в режиме нагрузки может быть найден из расчета магнитной цепи, проведенного при холостом ходе.
в режиме нагрузки может быть найден из расчета магнитной цепи, проведенного при холостом ходе.
Разделив уравнение МДС на  , получим уравнение токов:
, получим уравнение токов:
 , где
, где – приведенный (к обмотке статора) ток ротора;
– приведенный (к обмотке статора) ток ротора; – коэффициент приведения тока ротора.
– коэффициент приведения тока ротора.
Изменение механической нагрузки на валу двигателя вызывает изменение скольжения  . Это влияет на ЭДС обмотки ротора
. Это влияет на ЭДС обмотки ротора , и, следовательно, на ток ротора
, и, следовательно, на ток ротора , что приводит к изменению тока статора
, что приводит к изменению тока статора . Ток ротора
. Ток ротора оказывает на магнитную систему асинхронной машины в режиме двигателя такое же размагничивающее влияние, как и ток вторичной обмотки трансформатора.
оказывает на магнитную систему асинхронной машины в режиме двигателя такое же размагничивающее влияние, как и ток вторичной обмотки трансформатора.
В режиме идеального холостого хода, когда нагрузка на валу двигателя отсутствует и  , ток ротора
, ток ротора , ток статора
, ток статора . Если, же ротор двигателя затормозить, не отключая обмотки статора от сети (режим короткого замыкания), то скольжение
. Если, же ротор двигателя затормозить, не отключая обмотки статора от сети (режим короткого замыкания), то скольжение и ЭДС обмотки ротора достигает наибольшего значения
и ЭДС обмотки ротора достигает наибольшего значения . Также наибольшего значения достигнет ток
. Также наибольшего значения достигнет ток , а следовательно, и ток в обмотке статора
, а следовательно, и ток в обмотке статора .
.
studfiles.net
1. Асинхронные двигатели: общие сведения, устройство.
2. Принцип действия асинхронного двигателя с короткозамкнутым
ротором: понятие о скольжении, формула скольжения.
3. Уравнения электрического и магнитного состояний.
1. Асинхронные двигатели: общие сведения, устройство.
Асинхронная машина - это машина, в которой при работе возбуждается вращающееся магнитное поле, но ротор вращается асинхронно, т.е. с угловой скоростью, отличной от угловой скорости магнитного поля. Наибольшее распространение получили асинхронные двигатели, причем из всех электрических двигателей они являются самыми распространенными. Их преимущества:
- простота устройства,
- простота изготовления и эксплуатации,
- большая надежность и сравнительно низкая стоимость.
Широкое применение находит трехфазный асинхронный двигатель, изобретенный в 90-х годах прошлого века русским электротехником М.О.Доливо-Добровольским. Асинхронные машины малой мощности часто выполняются однофазными, что позволяет использовать их в устройствах, питающихся от двухпроводной сети. Такие машины находят широкое применение в бытовой технике.
Асинхронные машины могут работать в режиме генератора. Но асинхронные генераторы как источники электрической энергии не применяются, так как они не имеют собственного источника возбуждения магнитного потока и могут работать только параллельно с другими (синхронными) генераторами, имеющими лучшие показатели. Асинхронные двигатели применяются для привода машин и механизмов, к скорости вращения которых не предъявляются жесткие требования.
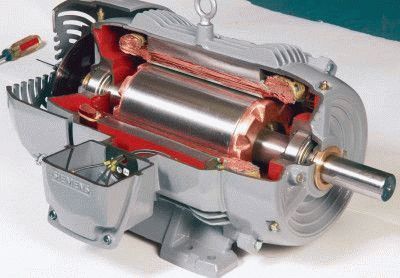
Недостатком асинхронных машин является относительная сложность и неэкономичность регулирования их эксплуатационных характеристик. Асинхронная машина состоит из статора - неподвижной части - и ротора - вращающейся части (рис. ).
Статор представляет собой полый цилиндр, набранный из стальных пластин, имеющих вид кольца и изолированных друг от друга. Стальной сердечник магнитопровода статора закрепляется в стальном или алюминиевом корпусе, охватывающем его со всех сторон. На внутренней поверхности сердечника в его пазах закладывается обмотка статора, которая у трехфазного асинхронного двигателя состоит из трех фазных обмоток, смещенных по окружности цилиндра друг относительно друга на 120 .

Рис.32
Ротор асинхронной машины также набирают из стальных штампованных листов в форме диска, насажанных на вал. Они образуют ротор, имеющий форму цилиндра. По окружности диска выштамповывают отверстия, образующие пазы ротора, в которые закладывают обмотку.
По конструктивному исполнению обмотки ротора асинхронные машины подразделяют на двигатели с короткозамкнутым ротором и двигатели с фазным ротором.
Короткозамкнутая обмотка образуется медными неизолированными стержнями, помещаемыми в пазы ротора. Поперечное сечение этих стержней имеет форму паза. Такие стержни иногда получают методом заливки в пазы ротора расплавленного алюминия. По торцам стержни объединяются короткозамыкающими кольцами, выполненными из однородного металла. Получается обмотка, не имеющая никаких выводов, по внешнему виду напоминающая конструкцию колеса, называемого "беличьей клеткой".
2. Принцип действия асинхронного двигателя с короткозамкнутым ротором: понятие о скольжении, формула скольжения.
В начале вопроса рассмотрим получение вращающегося магнитного поля.
На рис. показано условное сечение статора. А, В, С- начала витков каждой фазы. X, Y, Z - концы витков. Плоскости витков каждой фазы сдвинуты относительно друг друга на 120 . ax, by, cz - оси обмоток, вдоль которых направлены МДС каждой обмотки.

Рис.33
На временной диаграмме показаны токи в каждой обмотке при соединении их по схеме "звезда".Если принять направление тока в началах витков от наблюдателя к чертежу (условно "+"), то в момент t1
FC = iC WC = 0
FA = FB где FA = iA WA , FB = iB WB
По правилу буравчика определяем направление МДС F и F .Суммарная МДС направлена вдоль оси cz.
В момент t2 FB = FC = 0,5 FA . Суммарная МДС направлена вдоль оси ax.
В момент t3 FB = 0, F = FC. Суммарная МДС направлена вдоль оси by.
При этом в любой момент времени суммарная МДС имеет постоянное значение, равное 1,5 Fm. Таким образом, МДС изменяет свое направление
с течением времени, то есть вращается. Частота ее вращения  ,
,
где f - частота тока сети,
p - число пар полюсов машины.
Рассмотрим теперь принцип действия и режимы работы асинхронной
машины.
Ток в обмотках статора, подключенных к трехфазной сети, создает в машине поле, вращающееся относительно статора со скоростью n (с такой скоростью вращается вектор МДС и магнитного потока). Магнитный поток, при своем вращении пересекает проводники обмотки ротора и наводит в них ЭДС. В замкнутых через контактные кольца обмотках ротора потечет ток, магнитное поле которого взаимодействует с полем статора. В результате этого взаимодействия на валу машины возникает электромагнитный момент. При движении ротора в направлении вращения поля статора момент считается вращающим, в противном случае - тормозящим. Частота вращения ротора n должна отличаться от частоты магнитного поля статора. Только при этом условии магнитное поле статора движется относительно проводников ротора и наводит в них ЭДС. По этой причине двигатель называется асинхронным. Относительное отставание частоты вращения ротора от частоты вращения поля статора называется скольжением.
Величина скольжения определяется как
 или в процентах
или в процентах  100%,
100%,
где n1 - частота вращения магнитного поля статора,
n - частота вращения ротора.
В зависимости от соотношения скоростей n1 и n различают три режима работы асинхронной машины:
- при n > n1 (n > 0) электромагнитный момент поворачивает ротор в направлении вращения поля. Момент является вращающим. Машина работает как двигатель (0 < S < 1).
- при n > n1 , машина работает в режиме генератора (S < 0). Момент, приложенный к обмоткам ротора направлен встречно движению, т.е.является тормозящим.
- если вращение ротора направлено встречно полю статора, то такой режим называется режимом электромагнитного тормоза. При этом n < 0, S > 1. Такой режим используется в подъемно-транспортных устройствах.
3. Уравнения электрического и магнитного состояний.
Если цепь ротора разомкнуть, то ток его, протекающий в обмотке, отсутствует. В этом случае отсутствует и взаимодействие между статором и ротором. Ротор остается неподвижным. При этом машину можно рассматривать как трансформатор в режиме холостого хода.
По аналогии с трансформатором U1=-e1-e1p+r1i10 .
Относительная величина тока холостого хода в асинхронном двигателе вследствие воздушного зазора между статором и ротором существенно больше и составляет i10= 25 - 50%. ЭДС, наводимые в обмотках статора Е1 и ротора Е2, определяются выражениями
E2 = 4,44 f W 1Ko1Фm,
E2 = 4,44 f W 2Ko2 Фm,
где Ко1 < 1 и Ко2 < 1 - обмоточные коэффициенты.
Если замкнуть цепь ротора и внести его во вращающееся поле статора, то наводимая в роторе ЭДС создаст ток в обмотке ротора. При вращении ротора частота наводимой в ней ЭДС станет равной

где n2 = n1 - n = n1S.
Таким образом, при вращении ротора наводимая в его обмотке ЭДС 
Индуктивное сопротивление рассеяния 
Уравнение электрического состояния цепей статора и ротора имеет
вид:

где  рассеяния
рассеяния

Ток в обмотке ротора

Выразим ток через скольжение:

Первое выражение для тока характеризует реальный процесс.
I2 и E2s изменяются с действительной частотой f2 .Второе выражение для тока I2 соответствует неподвижному ротору. I2 и E2 изменяются с частотой питающей сети f.
Суммарная МДС всех обмоток статора вращается со скоростью n1 .
Амплитуда МДС вторичных обмоток ротора: F 1= 1,5 I2m W2.
Можно показать, что МДС ротора также вращается со скоростью n1 , то есть МДС статора и ротора можно суммировать

Ток статора можно выразить через приведенный ток ротора

За счет воздушного зазора между статором и ротором магнитное сопротивление машины велико, в связи с этим ток холостого хода значителен.
studfiles.net
Напряжение U1, приложенное к фазе обмотки статора, уравновешивается основной ЭДС E1, ЭДС рассеяния и падением напряжения на активном сопротивлении обмотки статора:
 В роторной обмотке аналогичное уравнение будет иметь вид:
В роторной обмотке аналогичное уравнение будет иметь вид:
 Но так как роторная обмотка замкнута, то напряжение U2=0, и если учесть еще, что E2s=SE2 и x2s=Sx2 , то уравнение можно переписать в виде:
Но так как роторная обмотка замкнута, то напряжение U2=0, и если учесть еще, что E2s=SE2 и x2s=Sx2 , то уравнение можно переписать в виде:
 Уравнение токов асинхронного двигателя повторяет аналогичное уравнение трансформатора:
Уравнение токов асинхронного двигателя повторяет аналогичное уравнение трансформатора:
 где
где

19
| Рабочие характеристики асинхронного двигателя |
|
|
| Рабочие характеристики асинхронного двигателя представляют собой графически выраженные зависимости частоты вращения n2, КПД η, полезного момента (момента на валу) М2, коэффициента мощности cos φ, и тока статора I1 от полезной мощности Р2 при U1 = const f1 = const. Скоростная характеристика n2 = f(P2). Частота вращения ротора асинхронного двигателя n2 = n1(1 - s). Скольжение s = Pэ2/Pэм, т. е. скольжение асинхронного двигателя, а следовательно, и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности. Пренебрегая электрическими потерями в роторе в режиме холостого хода, можно принять Рэ2 = 0, а поэтому s ≈ 0 и n20 ≈ n1. По мере увеличения нагрузки на валу асинхронного двигателя отношение s = Pэ2/Pэм растет, достигая значений 0,01 - 0,08 при номинальной нагрузке. В соответствии с этим зависимость n2 = f(P2) представляет собой кривую, слабо наклоненную к оси абсцисс. Однако при увеличении активного сопротивления ротора двигателя r2' угол наклона этой кривой увеличивается. В этом случае изменения частоты асинхронного двигателя n2 при колебаниях нагрузки Р2 возрастают. Объясняется это тем, что с увеличением r2' возрастают электрические потери в роторе.
Рис. 1. Рабочие характеристики асинхронного двигателя двигателя Зависимость М2 =f(P2). Зависимость полезного момента на валу асинхронного двигателя М2 от полезной мощности Р2 определяется выражением M2 = Р2/ ω2 = 60 P2/ (2πn2) = 9,55Р2/ n2, где Р2 — полезная мощность, Вт; ω2 = 2πf 2/ 60 — угловая частота вращения ротора. Из этого выражения следует, что если n2 = const, то график М2 =f2(Р2) представляет собой прямую линию. Но в асинхронном двигателе с увеличением нагрузки Р2 частота вращения ротора уменьшается, а поэтому полезный момент на валу М2 с увеличением нагрузки возрастает не сколько быстрее нагрузки, а следовательно, график М2 =f (P2) имеет криволинейный вид.
Рис. 2. Векторная диаграмма асинхронного двигателя при небольшой нагрузке Зависимость cos φ1 = f (P2). В связи с тем что ток статора асинхронного двигателя I1 имеет реактивную (индуктивную) составляющую, необходимую для создания магнитного поля в статоре, коэффициент мощности асинхронных двигателей меньше единицы. Наименьшее значение коэффициента мощности соответствует режиму холостого хода.Объясняется это тем, что ток холостого хода электродвигателя I0 при любой нагрузке остается практически неизменным. Поэтому при малых нагрузках двигателя ток статора невелик и в значительной части является реактивным (I1 ≈ I0). В результате сдвиг по фазе тока статора относительно напряжения получается значительным (φ1 ≈ φ0), лишь немногим меньше 90° (рис. 2). Коэффициент мощности асинхронных двигателей в режиме холостого хода обычно не превышает 0,2. При увеличении нагрузки на валу двигателя растет активная составляющая тока I1 и коэффициент мощности возрастает, достигая наибольшего значения (0,80 - 0,90) при нагрузке, близкой к номинальной. Дальнейшее увеличение нагрузки на валу двигателя сопровождается уменьшением cos φ1 что объясняется возрастанием индуктивного сопротивления ротора (x2s) за счет увеличения скольжения, а следовательно, и частоты тока в роторе. В целях повышения коэффициента мощности асинхронных двигателей чрезвычайно важно, чтобы двигатель работал всегда или по крайней мере значительную часть времени с нагрузкой, близкой к номинальной. Это можно обеспечить лишь при правильном выборе мощности двигателя. Если же двигатель работает значительную часть времени недогруженным, то для повышения cos φ1, целесообразно подводимое к двигателю напряжение U1 уменьшить. Например, в двигателях, работающих при соединении обмотки статора треугольником, это можно сделать пересоединив обмотки статора в звезду, что вызовет уменьшение фазного напряжения в раз. При этом магнитный поток статора, а следовательно, и намагничивающий ток уменьшаются примерно в раз. Кроме того, активная составляющая тока статора несколько увеличивается. Все это способствует повышению коэффициента мощности двигателя. На рис. 3 представлены графики зависимости cos φ1, асинхронного двигателя от нагрузки при соединении обмоток статора звездой (кривая 1) и треугольником (кривая 2).
Рис. 3. Зависимость cos φ1,от нагрузки при соединении обмотки статора двигателя звездой (1) и треугольником (2) |
20
Изменение частоты. При питании асинхронного двигателя от автономного источника электроэнергии небольшой мощности (транспортные установки, передвижные электростанции) частота и напряжение сети, к которой подключают двигатель, могут отличаться от номинальных. Рассмотрим влияние изменения частоты на работу двигателя при условии, чтонапряжение U1 =Uном = const.
Если принять U1 ≈ Еl , то согласно (4.2)
(4.105)
Фm = U1 /(4,44f1 w1 ko61 ).
Из (4.29) имеем, что
(4.106)
I2 = М/(см Фт cos ψ2).
Следовательно, изменение частоты f1 приводит к изменению потока Фт и соответствующему изменению тока ротора I2 и нагрузочной составляющей I'2 тока статора. При уменьшении частоты магнитный поток и ток холостого хода I0 увеличиваются, причем ток I0 из-за насыщения стали магнитопровода возрастает быстрее, чем магнитный поток. Обычно уменьшение частоты f1 на 10 % вызывает увеличение тока I0 на 20—30%. Поскольку ток I0 является практически реактивным, это приводит к снижению коэффициента мощности двигателя.
При увеличении частоты f1 пропорционально возрастает частота вращения п2 . Если нагрузка двигателя имеет «вентиляторную» характеристику, то нагрузочный момент возрастает пропорционально квадрату или кубу частоты вращения, т. е. частоты f1. Кроме того, магнитный поток Фт уменьшается обратно пропорционально изменению частоты. Все это, согласно (4.106), приводит к резкому увеличению тока I2. При возрастании частоты на 10% ток ротора двигателя, вращающего вентилятор, увеличивается примерно в 1,5 раза, что может привести к перегреву двигателя.
При неизменном нагрузочном моменте увеличение частоты повышает опасность нарушения устойчивости двигателя, так как снижается максимальный момент двигателя пропорциональноf12. Таким образом, отклонение частоты f1 от номинального значения приводит к ухудшению условий работы двигателей и поэтому частота не должна отличаться (согласно ГОСТу) от номинальной более чем на 5%.
Изменение напряжения. Обычно асинхронные двигатели рассчитывают так, чтобы при номинальном режиме они имели КПД и cos φ1 , близкие к максимальным. Кроме того, максимум КПД достигается, когда постоянные потери — механические и в стали равны переменным потерям в обмотках (см. § 4.9). Поэтому влияние изменения напряжения является неоднозначным и зависит от нагрузки на валу двигателя.
При увеличении напряжения возрастает магнитный поток и, следовательно, увеличиваются ток холостого хода и магнитные потери в стали магнитопровода. Вследствие этого КПД и cos φ1двигателя уменьшаются. Уменьшение напряжения опасно тем, что пропорционально квадрату напряжения изменяется максимальный вращающий момент двигателя и при большом моменте нагрузки может произойти нарушение устойчивости двигателя.
Однако при частичной нагрузке, когда нет угрозы нарушения устойчивости, уменьшение напряжения может оказаться благоприятным, так как пропорционально напряжению уменьшаются магнитный поток Фm , ток холостого хода и магнитные потери в стали магнитопровода, вследствие чего КПД и cos φ1 могут возрасти.
|
| Рис. 4.72. Зависимости КПД и cos φ1 асинхронного двигателя от питающего напряжения |
На рис. 4.72, а показаны кривые зависимости КПД от напряжения сети для двух значений мощности двигателя Р = Рном и 0,6Рном . Каждой нагрузке соответствует оптимальное напряжение, при котором постоянные потери равны переменным. Чем меньше нагрузка, тем меньше оптимальное значение напряжения. Коэффициент мощности двигателя при нагрузках, меньших номинальной, также может возрастать с уменьшением напряжения и для каждой нагрузки существует напряжение, при котором коэффициент мощности имеет максимум (рис. 4.72,б). Таким образом, желательно при частичных нагрузках снижать напряжение питания, для того чтобы КПД и cos φ1 поддерживались на высоком уровне.
| Рис. 4.73. Круговые диаграммы асинхронного двигателя при номинальном и пониженном напряжении |
|
На рис. 4.73 показаны круговые диаграммы двигателя при номинальных напряжении и нагрузке (а) и при пониженном напряжении и частичной нагрузке (б). При понижении напряжения уменьшается ток холостого хода и диаметр окружности токов. В обоих случаях значение cos φ1 близко к максимальному, так как вектор тока Í1 расположен по касательной к окружности токов. Если двигатель длительное время работает с нагрузками менее 0,5Рном , то обычно бывает выгодным иметь устройство, регулирующее напряжение (например, трансформатор с регулированием под нагрузкой). В простейшем случае можно изменять фазное напряжение двигателя, переключая его обмотки с соединения Δ (при номинальной нагрузке) на Y (при малой нагрузке).
|
|
| Рис. 4.74. Рабочие характеристики асинхронного двигателя при соединении обмотки статора по схемам Y и Δ |
На рис. 4.74 показаны кривые относительных значений I1 , η и cos φ1 для двигателя мощностью 28 кВт при таком переключении. Недостатком такого метода является ступенчатое изменение напряжения. Следует иметь в виду, что при включении обмоток двигателя по схеме Y его максимальный момент, пропорциональный квадрату напряжения, уменьшается в три раза. Следовательно, такое переключение можно производить, если нагрузка двигателя равна или меньше 30% от номинальной.
Несимметрия напряжения. Несимметричную систему трехфазных напряжений можно разложить на симметричные составляющие прямой, обратной и нулевой последовательности (см. гл. 2) и проанализировать влияние каждой из них на работу двигателя. ГОСТ допускает несимметрию напряжения (отношение напряжения обратной последовательности к номинальному напряжению) до 2%.
|
|
| Рис. 4.75. Зависимости моментов асинхронного двигателя от скольжения |
Система напряжений обратной последовательности создает магнитное поле, вращающееся в противоположную относительно ротора сторону с частотой вращения nобр = 60f1 р = |n1 |.
Вследствие этого скольжение ротора относительно обратного поля sобр = (n1 - n2 )/n1 = [n1 + n1 (1 - s)]/n1 ≈ 2, так как скольжение асинхронного двигателя в установившемся режиме s ≈ (0,01 ÷ 0,05). Следовательно, обратное поле создает тормозящий момент Мобр, а токи обратной последовательности создают дополнительные потери, увеличивающие нагревание обмоток и снижающие КПД.
На рис. 4.75 показана зависимость моментов асинхронного двигателя от скольжения. Из нее следует, что под влиянием токов обратной последовательности результирующий момент двигателя Мрез снижается и скольжение при том же нагрузочном моменте Мн на валу возрастает.
|
|
| Рис. 4.76. Зависимость КПД двигателя от несимметрии питающего напряжения |
На рис. 4.76 показаны зависимости КПД от асимметрии напряжения для одного из двигателей общего применения мощностью 5,5 кВт. При несимметрии напряжения 2% КПД снижается примерно на 2%, а при 4% почти на 5,5%. Следовательно, несимметрия питающего напряжения крайне нежелательна.
Обрыв фазы обмотки статора. При пуске трехфазного асинхронного двигателя с оборванной фазой создаются такие условия, как и в однофазном двигателе (см. § 4.17), т. е. его результирующий момент Мрез = Мпр — Мобр = 0. Если ротор двигателя в момент обрыва находится во вращении, то Мпр > Мо6р и при Мрез > Мн двигатель продолжает вращаться, однако максимальный момент Мmaxоказывается существенно меньшим, чем при неповрежденной фазе. При переходе двигателя в однофазный режим частота вращения практически
|
|
| Рис. 4.77. Зависимости моментов асинхронного двигателя от скольжения при обрыве фазы обмотки ротора |
не изменяется, поэтому мощность на валу также остается приблизительно одинаковой. Но отношение токов в этих режимах I1 /I3 = (3η3 cos φ3)/(2η1 cos φ1 ), где индекс 1 относится к однофазному режиму, а 3 — к трехфазному. Поэтому при условииη1 = η3 и cos φ1 = cos φ3 ток I1 в однофазном режиме в 1,5 раза больше, чем в трехфазном. В действительности КПД и cos φ в однофазном режиме уменьшаются по сравнению с трехфазным, вследствие чего ток I1 возрастает в еще большей степени. Если двигатель работает при нагрузке, близкой к номинальной, то при обрыве фазы его ток становится значительно больше номинального и двигатель быстро перегревается и «выходит из строя».
Обрыв фазы обмотки ротора. При несимметрии сопротивлений фаз ротора возникает эффект одноосного демпфирования, подробно рассмотренный в § 6.14. В результате этого кривая момента двигателя в области s = 0,5 имеет провал. Значение этого провала может оказаться настолько большим, что двигатель при пуске под нагрузкой не достигает номинальной частоты вращения и «застревает» при n2 ≈ 0,5п1 . При обрыве одной из фаз ротора электромагнитный момент в области s = 0,5 отрицательный (рис. 4.77), вследствие чего двигатель не разгоняется до номинальной частоты вращения даже при пуске без нагрузки
21
22
studfiles.net
Основные уравнения асинхронного двигателя аналогичны уравнениям трансформатора, полученным выше (см. раздел 4).
Напряжение U1, приложенное к фазе обмотки статора, уравновешивается ЭДС самоиндукции Е1, ЭДС рассеяния Еδ1 = I1Х1 и падением напряжения на активном сопротивлении обмотки статора
ΔU1 = I1R1
 (5.2)
(5.2)
Для роторной обмотки вращающегося ротора уравнение равновесия напряжения будет иметь вид
 (5.3)
(5.3)
Так как роторная обмотка замкнута, то напряжение U2 = 0 и, учитывая, что Е2S =sЕ2 и Х2S = sХ2, уравнение (5.3) можно переписать в виде
 (5.4)
(5.4)
Уравнение токов асинхронного двигателя повторяет аналогичное уравнение трансформатора:
 (5.5)
(5.5)
где I1 – ток статора;
I0 – ток холостого хода статора при неподвижном роторе и разомкнутой обмотке ротора;
 - приведенный ток ротора (см. раздел 5.7).
- приведенный ток ротора (см. раздел 5.7).
Для построения векторной диаграммы осуществим приведение параметров обмотки ротора к параметрам обмотки статора. При этом обмотку ротора с числом фаз m2 , обмоточным коэффициентом k2 и числом витков W2 заменяют обмоткой с соответствующими параметрами статора m1, k1, W1, соблюдая при этом энергетический баланс в роторе.
Методика приведения параметров асинхронного двигателя аналогична методике приведения вторичной обмотки трансформатора. При этом уравнение обмотки ротора (5.4) примет вид
 (5.6)
(5.6)
где 


 ;
;
 - коэффициент трансформации асинхронного двигателя.
- коэффициент трансформации асинхронного двигателя.
Построим векторную диаграмму асинхронного двигателя, используя принципы построения векторной диаграммы трансформатора (см. раздел 4.9.) и основные уравнения двигателя (5.2), (5.5), (5.6).
Полученная диаграмма, представленная на рис. 5.7, аналогична векторной диаграмме трансформатора в рабочем режиме (рис. 4.9), с учетом того, что для двигателя U2 = 0 и угол ψ2 между направлениями векторов ЭДС Е1 =  и вектором приведенного вторичного тока
и вектором приведенного вторичного тока  определяется как
определяется как
ψ2 = arctg 

Рис. 5.7. Векторная диаграмма асинхронного двигателя
Эквивалентная схема замещения асинхронного двигателя, представленная на рис. 5.8, аналогична схеме замещения нагруженного трансформатора и соответствует основным уравнениям (5.2), (5.5), (5.6) после преобразования последнего к виду 








R1
X1











R0
I1





~U1
E1




X0
I0


Рис. 5.8. Эквивалентная схема замещения асинхронного двигателя.
На представленной схеме R1, X1 - активное и индуктивное сопротивления обмотки статора;  ,
, - приведенные активное и индуктивное сопротивления обмотки ротора;R0, X0 - активное и индуктивное сопротивления сердечников статора и ротора; s – скольжение.
- приведенные активное и индуктивное сопротивления обмотки ротора;R0, X0 - активное и индуктивное сопротивления сердечников статора и ротора; s – скольжение.
Величину  можно рассматривать как сопротивление нагрузки, включенное в обмотку ротора. Оно является единственным переменным параметром схемы. Изменение этого сопротивления эквивалентно изменению скольженияs, а следовательно, изменению нагрузки на валу двигателя. Величина
можно рассматривать как сопротивление нагрузки, включенное в обмотку ротора. Оно является единственным переменным параметром схемы. Изменение этого сопротивления эквивалентно изменению скольженияs, а следовательно, изменению нагрузки на валу двигателя. Величина
 (5.7.)
(5.7.)
является величиной напряжения, приложенного к нагрузке двигателя.
studfiles.net
Рассуждая аналогично пункту 4.3 составим основные уравнения асинхронного двигателя.
Напряжение U1, приложенное к фазе обмотки статора, уравновешивается основной ЭДС E1, ЭДС рассеяния и падением напряжения на активном сопротивлении обмотки статора.

В роторной обмотке аналогичное уравнение будет иметь вид:

Но т.к. роторная обмотка замкнута, то напряжение U2=0, и если учесть еще, что E2s=SE2и x2s=Sx2 , то уравнение можно переписать в виде:

Уравнение токов асинхронного двигателя повторяет аналогичное уравнение трансформатора:
 ,
,
где
 .
.
Для того чтобы параметры ротора и статора изобразить на одной векторной диаграмме, произведем приведение параметров обмотки ротора к параметрам обмотки статора. При этом обмотку ротора с числом фаз m2, обмоточным коэффициентом k2и числом витков W2заменяют обмоткой с m1×k1×W1, соблюдая при этом энергетический баланс в роторе.
Не останавливаясь на методике приведения параметров, которая повторяется из раздела "трансформаторы", перепишем основные уравнения приведенного асинхронного двигателя:
1.  2.
2. 3.
3.
Используя принципы построения векторной диаграммы для трансформатора, построим ее для асинхронного двигателя.
Вначале во втором основном уравнении величину r2' представим в виде:
 ,
,
что математически не противоречит друг другу.
Тогда само уравнение можно переписать:

Используя три основных уравнения двигателя, построим векторную диаграмму, которая, будет несколько напоминать диаграмму трансформатора (рис. 5.7.1).

Вторичное напряжение определяется вектором:
 ,
,
иначе говоря, асинхронный двигатель в электрическом отношении работает как трансформатор при активной нагрузке.
Мощность, отдаваемая вторичной обмоткой данного трансформатора
 ,
,
представляет собой полную механическую мощность, развиваемую двигателем.
Уравнениям ЭДС и токов соответствует эквивалентная схема замещения (рис. 5.8.1.). Таким образом, сложную магнитную цепь электрической машины можно заменить электрической схемой. Сопротивление r2'(1 - S)/S можно рассматривать как внешнее сопротивление, включенное в обмотку ротора. Оно является единственным переменным параметром схемы. Изменение этого сопротивления эквивалентно изменению нагрузки на валу двигателя, а следовательно, изменению скольжения S.

В обмотку статора из сети поступает мощность P1. Часть этой мощности идет на потери в стали Pсl, а также потери в обмотке статора Рэ1:

Оставшаяся мощность посредством магнитного потока передается на ротор и называется электромагнитной мощностью:

Часть электромагнитной мощности затрачивается на покрытие электрических потерь в обмотке ротора:

Оставшаяся мощность преобразуется в механическую, получившую название полной механической мощности:
Р2'=Рэм-Рэ2
Воспользовавшись ранее полученной формулой

запишем выражение полной механической мощности:

тогда

или
Рэ2=SРэм,
т.е. мощность электрических потерь пропорциональна скольжению.
Мощность на валу двигателя P2меньше полной механической мощности Р2’ на величину механических Рмехи добавочных Рдобпотерь:
Р2=Р2’-(Рмех.+Рдоб.).
Таким образом:
Р2=Р1-SP,
где
SP=Pсl+Рэ1+Рэ2+Рмех.+Рдоб.
Коэффициент полезного действия есть отношение мощности на валу P2к потребляемой мощности P1:

studfiles.net
Рассуждая аналогично пункту 4 составим основные уравнения асинхронного двигателя.
Напряжение U1, приложенное к фазе обмотки статора, уравновешивается основной ЭДС E1, ЭДС рассеяния и падением напряжения на активном сопротивлении обмотки статора.

В роторной обмотке аналогичное уравнение будет иметь вид:

Но т.к. роторная обмотка замкнута, то напряжение U2=0, и если учесть еще, что E2s=SE2 и x2s=Sx2 , то уравнение можно переписать в виде:

Уравнение токов асинхронного двигателя повторяет аналогичное уравнение трансформатора:
 ,
,
где
 .
.
Для того чтобы параметры ротора и статора изобразить на одной векторной диаграмме, произведем приведение параметров обмотки ротора к параметрам обмотки статора. При этом обмотку ротора с числом фаз m2, обмоточным коэффициентом k2 и числом витков W2 заменяют обмоткой с m1×k1×W1, соблюдая при этом энергетический баланс в роторе.
Не останавливаясь на методике приведения параметров, которая повторяется из раздела "трансформаторы", перепишем основные уравнения приведенного асинхронного двигателя:
1. 
2. 
3. 
Используя принципы построения векторной диаграммы для трансформатора, построим ее для асинхронного двигателя.
Вначале во втором основном уравнении величину r2' представим в виде:
 ,
,
что математически не противоречит друг другу.
Тогда само уравнение можно переписать:

Используя три основных уравнения двигателя, построим векторную диаграмму, которая, будет несколько напоминать диаграмму трансформатора (рис. 5.7.1).

Вторичное напряжение определяется вектором:
 ,
,
иначе говоря, асинхронный двигатель в электрическом отношении работает как трансформатор при активной нагрузке.
Мощность, отдаваемая вторичной обмоткой данного трансформатора
 ,
,
представляет собой полную механическую мощность, развиваемую двигателем.
Уравнениям ЭДС и токов соответствует эквивалентная схема замещения (рис. 5.8.1.). Таким образом, сложную магнитную цепь электрической машины можно заменить электрической схемой. Сопротивление r2'(1 - S)/S можно рассматривать как внешнее сопротивление, включенное в обмотку ротора. Оно является единственным переменным параметром схемы. Изменение этого сопротивления эквивалентно изменению нагрузки на валу двигателя, а следовательно, изменению скольжения S.

В обмотку статора из сети поступает мощность P1. Часть этой мощности идет на потери в стали Pсl, а также потери в обмотке статора Рэ1:

Оставшаяся мощность посредством магнитного потока передается на ротор и называется электромагнитной мощностью:

Часть электромагнитной мощности затрачивается на покрытие электрических потерь в обмотке ротора:

Оставшаяся мощность преобразуется в механическую, получившую название полной механической мощности:
Р2'=Рэм-Рэ2
Воспользовавшись ранее полученной формулой

запишем выражение полной механической мощности:

тогда

или
Рэ2=SРэм,
т.е. мощность электрических потерь пропорциональна скольжению.
Мощность на валу двигателя P2 меньше полной механической мощности Р2’ на величину механических Рмех и добавочных Рдоб потерь:
Р2=Р2’-(Рмех.+Рдоб.).
Таким образом:
Р2=Р1-SP,
где
SP=Pсl+Рэ1+Рэ2+Рмех.+Рдоб.
Коэффициент полезного действия есть отношение мощности на валу P2 к потребляемой мощности P1:

studfiles.net
Уравнения асинхронной машины выводятся из уравнений, составленных по закону Кирхгофа для каждой фазы статора и для обмоток ротора таким же образом, как и для синхронных машин. Но кроме преобразований переменных статора к осям, вращающимся вместе с полем статора, производится преобразование составляющих тока ротора к осям, вращающимся имеете с ротором. Дифференциальные уравнения асинхронного двигателя в осях d, q, используемые в стандарте отрасли, приведены в:




 (1.16)
(1.16)



где Ud, Uq - составляющие напряжения сети по осям d, q; ida, iqa - составляющие токи статора двигателя по осям; ψda, ψqa - продольное и поперечное потокосцепления статора; ψrda, ψrqa - продольное и поперечное потокосцепления ротора; ωс, ωа - частоты вращения сети и двигателя; rа, ха- активное и индуктивное сопротивление статора двигателя; µ - коэффициент магнитной связи статора и ротора; Мва, Мса- вращающий момент двигателя и момент сопротивления на валу двигателя; Tja, Тrа - постоянная времени механической инерции и электрическая постоянная времени ротора.
Заводы - изготовители асинхронных двигателей определяют параметры схем замещения, на базе которых можно находить коэффициенты дифференциальных уравнений. Схема замещения асинхронного двигателя показана на рис. 1.4.

Рис. 1.4. Схемы замещения асинхронного двигателя.
Параметры схемы замещения асинхронного двигателя в относительных единицах определяются следующим образом:
Сначала определяем базисное сопротивление:

где числитель z6 - базисное сопротивление; UФН - фазное напряжение сети; знаменатель IаН - номинальный ток двигателя.
 (1.17)
(1.17)
В номинальном режиме:
 (1.18)
(1.18)
В пусковом режиме:
 (1.19)
(1.19)
где rm - сопротивление, учитывающее потери в магнитопроводе; хm - индуктивное сопротивление контура намагничивания; rs - активное сопротивление обмотки статора; xs - индуктивное сопротивление рассеяние обмотки статора; r2, х2 - активное и индуктивное сопротивления ротора; r2H, х2H - активное и индуктивное сопротивления ротора (приведенное к статору) в номинальном режиме; r2n, х2n - активное и индуктивное сопротивления ротора (приведенное к статору) в пусковом режиме.
Один из основных видов нагрузки судовой электроэнергетической системы - статическая нагрузка, которая включает активные rn и индуктивные хnсопротивления. Уравнения статической нагрузки получаются таким же образом, что и уравнения синхронной машины, приведенные к осям d, q ротора генератора.
В неподвижной системе координат уравнения активно-индуктивной нагрузки записываются следующим образом [19,21,70, 89]:

 (1.20)
(1.20)

Совместим с началом координат системы осей а, b, с, начало координат системы d, q, вращающейся в пространстве со скоростью ω = рγ, где γ - угол между осями.
Выразим величину фазного напряжения Uа, приложенного к нагрузке и равного проекции изображающего вектора U на ось а, через проекции его на оси d, q. После преобразования получим окончательное уравнение статической нагрузки в относительных единицах:

 (1.21)
(1.21)
Здесь следует иметь в виду, что хn = ωLn, где ω - текущее значение частоты, определяемое скоростью вращения системы координат d, q, связанной с ротором генератора. Поэтому если определить хn при номинальной частоте ω = ωб и подставить его в уравнения нагрузки, то влияние изменения скорости вращения генератора следует учесть умножением хn, на величину (1+ φ), где  относительное отклонение скорости вращения генератора.
относительное отклонение скорости вращения генератора.
rn и хn определяем из равенств:

studfiles.net