Реакции якоря при индуктивной нагрузке . При индуктивной нагрузке ток отстает по фазе от э. д. с. Е0на угол ψ = π/2 (рис. 13.6,б). В этом случае ток катушки достигает максимального значения на четверть периода позднее, чем э. д. с., т. е. после того как полюсы сдвинутся вправо на половину полюсного деления относительно того положения, при котором э. д. с. имеет максимальное значение (рис. 13.6, а). Иначе говоря, ток максимален, когда середина полюсов сдвинется на 90 эл. град и они находятся как раз посередине между сторонами катушки.
И  з рис. 13.6, а видно, что часть магнитного потока, образующегося вокруг проводников якоря, составляет поток рассеяния Фσa. Часть потока входит в ротор и замыкается через два соседних полюса вдоль полюсов, образуя продольное поле реакции якоря Фаd. Продольный поток реакции якоря как под набегающим краем полюса, так и под его убегающим краем направлен диаметрально противоположно потоку полюсов, ослабляя тем самым основное поле машины, т. е. оказывая размагничивающее действие. Для учета влияния продольного поля реакции якоря полагают, что оно индуцирует в обмотке якоря э. д. с. Ead(рис. 13.6,б).
з рис. 13.6, а видно, что часть магнитного потока, образующегося вокруг проводников якоря, составляет поток рассеяния Фσa. Часть потока входит в ротор и замыкается через два соседних полюса вдоль полюсов, образуя продольное поле реакции якоря Фаd. Продольный поток реакции якоря как под набегающим краем полюса, так и под его убегающим краем направлен диаметрально противоположно потоку полюсов, ослабляя тем самым основное поле машины, т. е. оказывая размагничивающее действие. Для учета влияния продольного поля реакции якоря полагают, что оно индуцирует в обмотке якоря э. д. с. Ead(рис. 13.6,б).
Поток рассеяния Фσа, замыкающийся в основании через воздух только вокруг проводников обмотки статора (якоря), индуцирует в каждой фазе обмотки якоря э. д. с. рассеяния  , где Хσа — индуктивное сопротивление, обусловленное потоком рассеяния. Поток рассеяния Фσа не оказывает влияния на поле полюсов.
, где Хσа — индуктивное сопротивление, обусловленное потоком рассеяния. Поток рассеяния Фσа не оказывает влияния на поле полюсов.
Реакция якоря при емкостной нагрузке . При емкостной нагрузке ток опережает по фазе э. д. с.E0на угол π/2. В этом случае ток максимален на четверть периода раньше, чем э. д. с., т. е. тогда, когда вращающиеся полюсы своими серединами не доходят на 90 эл. град до такого положения, при котором э. д. с. в катушке максимальна. Соответствующая картина распределения магнитных потоков представлена на рис. 13.7, а. Из рисунка видно, что поле реакции якоря продольное Фаdи что оно как под набегающим, так и под убегающим краями полюсов усиливает основное поле машины, т. е. при емкостной нагрузке реакция якоря намагничивающая. Учет влияния этой реакции якоря с помощью Eadпоказан на рис. 13.7,б.
Итак, в синхронном генераторе реакция якоря зависит от характера нагрузки и при отстающем токе является размагничивающей, а при опережающем — намагничивающей.
При работе синхронного генератора под нагрузкой э. д. с. в каждой фазе обмотки статора E с учетом явления реакции якоря будет несколько отличаться от э. д. с.E0 при холостом ходе, так как эта э. д. с. индуцируется не магнитным потоком холостого хода Ф0, а результирующим магнитным потоком Фрез. Векторы этих э. д. с. для всех трех рассмотренных случаев нагрузки изображены на соответствующих диаграммах (рис. 13.5,б; 13.6,б; 13.7,б). При построении векторных диаграмм исходят из положения, что если поток реакции якоря в машине равен Фа(в явнополюсной машине этот поток делится на Фаdи Фаq), то результирующий магнитный поток в зазоре ненасыщенной машины
 (13.4)
(13.4)
а э. д. с., индуцируемая потоком Фрезв фазе статора неявнополюсного генератора,
 (13.5)
(13.5)
где  — комплексная э. д. с., индуцируемая в фазе статора потоком
— комплексная э. д. с., индуцируемая в фазе статора потоком  — комплексная э. д. с., индуцируемая в фазе статора потоком реакции якоря Фа; Еапропорциональна потоку Фа, а в ненасыщенной машине - и току якоря I, поэтому ее можно рассматривать как э. д. с. самоиндукции, наведенную в обмотке якоря, и представить в виде
— комплексная э. д. с., индуцируемая в фазе статора потоком реакции якоря Фа; Еапропорциональна потоку Фа, а в ненасыщенной машине - и току якоря I, поэтому ее можно рассматривать как э. д. с. самоиндукции, наведенную в обмотке якоря, и представить в виде  где Ха— индуктивное сопротивление синхронной машины, обусловленное потоком якоря.
где Ха— индуктивное сопротивление синхронной машины, обусловленное потоком якоря.
Э. д. с. явнополюсного генератора при его работе под нагрузкой равна
 (13.6)
(13.6)
г 
 де
де  - э. д. с., индуцируемые соответственно потоками Фаq, и Фаd. Для ненасыщенной машины можно считать, что
- э. д. с., индуцируемые соответственно потоками Фаq, и Фаd. Для ненасыщенной машины можно считать, что
 (13.7)
(13.7)
где Хaqи Хad, — индуктивные сопротивления обмотки якоря, соответственно обусловленные полями поперечной и продольной реакций якоря. В соответствии с рис. 13.8 ток якоряIможно представить в виде поперечной Iq= I cos ψ и продольнойId= I sin ψ составляющих.
В синхронных машинах с неявно выраженными полюсами магнитное сопротивление воздушного зазора одинаково по всей окружности ротора и не зависит от взаимного расположения статора и ротора, поэтому отпадает необходимость в разделении магнитного потока, проникающего из статора в ротор, на поперечную и продольную составляющие. В этом случае магнитное поле реакции якоря Фаиндуцирует в обмотке якоря э. д. с.Eа.
Полученные выводы справедливы и для общего случая, когда нагрузка смешанная, т. е. когда угол сдвига фаз ψ по абсолютному значению меньше 90°. Отстающий ток (активно-индуктивная нагрузка) размагничивает машину, а опережающий ток (активно-емкостная нагрузка) подмагничивает ее.
Вопрос 28. Хар-ки СД
Рабочие характеристики. На рис. 5.24 представлены рабочие характеристики синхронного двигателя: Mмex, cosφ, Ia, η=f(Р2), где Р2— полезная мощность.
Полезный момент Ммех пропорционален полезной мощности, так как двигатель вращается с постоянной скоростью. Если при холостом ходе установлен cosφ = 1, то при увеличении нагрузки коэффициент мощности несколько уменьшается. Изменение тока якоря отклоняется от прямолинейной зависимости за счет уменьшения cosφ.
Двигатели с обмотками (пусковой и возбуждения) имеют лучшие пусковые и рабочие характеристики, чем синхронные двигатели других типов. Они устойчиво работают, имеют высокие пусковой и рабочий моменты, к. п. д. и коэффициент мощности. Их к. п. д. и коэффициент мощости выше, чем у асинхронных двигателей. Синхронные двигатели с обмоткой возбуждения широко применяются в промышленных приводах и во многих случаях вытесняют асинхронные. Однако из-за сложности пуска и трудности размещения обмоток синхронные микродвигатели изготовляют без обмотки возбуждения. Такие двигатели не нуждаются в питании постоянным током и не имеют скользящих контактов, что обеспечивает их повышенную надежность. Кроме того, во время пуска они не требуют переключения обмотки возбуждения с реостата на источник постоянного тока, что значительно облегчает пуск.

Угловая и механическая характеристики . Зависимость момента синхронной машины от угла нагрузки  при Uc = const называется угловой характеристикой машины. Угловая характеристика (рис. 4.15) в соответствии с (4.5) имеет вид синусоиды. В двигательном режиме угол положительный, поэтому на графике двигательному режиму соответствует положительная полуволна синусоиды. В генераторном режиме угол отрицательный, ему соответствует отрицательная полуволна синусоиды. В диапазоне угла нагрузки -90°< <+90° (ветвь синусоиды показана сплошной линией) работа машины, как в двигательном, так и в генераторном режиме устойчива, а на участках кривой, изображённых штриховой линией, – неустойчива.
при Uc = const называется угловой характеристикой машины. Угловая характеристика (рис. 4.15) в соответствии с (4.5) имеет вид синусоиды. В двигательном режиме угол положительный, поэтому на графике двигательному режиму соответствует положительная полуволна синусоиды. В генераторном режиме угол отрицательный, ему соответствует отрицательная полуволна синусоиды. В диапазоне угла нагрузки -90°< <+90° (ветвь синусоиды показана сплошной линией) работа машины, как в двигательном, так и в генераторном режиме устойчива, а на участках кривой, изображённых штриховой линией, – неустойчива.
 На устойчивом участке характеристики машина обладает свойством саморегулирования, т.е. при изменении момента нагрузки автоматически изменяется в том же направлении момент машины, причём так, что в новом установившемся режиме между ними достигается равновесное устойчивое состояние. Так, в двигательном режиме при увеличении механической нагрузки Мс ротор притормаживается, угол нагрузки увеличивается и в соответствии с угловой характеристикой увеличивается вращающий момент двигателя М. При равенстве М= Мс наступит новый установившийся режим, причём частота вращения ротора останется неизменной и равной частоте вращения магнитного поля статора; только при этом равенстве существует электромагнитное взаимодействие полюсов ротора и статора, обусловливающее момент М машины.
На устойчивом участке характеристики машина обладает свойством саморегулирования, т.е. при изменении момента нагрузки автоматически изменяется в том же направлении момент машины, причём так, что в новом установившемся режиме между ними достигается равновесное устойчивое состояние. Так, в двигательном режиме при увеличении механической нагрузки Мс ротор притормаживается, угол нагрузки увеличивается и в соответствии с угловой характеристикой увеличивается вращающий момент двигателя М. При равенстве М= Мс наступит новый установившийся режим, причём частота вращения ротора останется неизменной и равной частоте вращения магнитного поля статора; только при этом равенстве существует электромагнитное взаимодействие полюсов ротора и статора, обусловливающее момент М машины.
Максимальный момент Мmax машины является и критическим. Если нагрузить двигатель так, что Мс> Мmax , то угол нагрузки станет больше 90°, рабочая точка перейдёт на неустойчивый участок угловой характеристики. Вращающий момент двигателя М начнёт уменьшаться, ротор тормозиться, двигатель выйдет из синхронизма и может остановиться. Аналогичные явления происходят и в генераторном режиме. Выход («выпадение») машины из синхронизма – явление недопустимое, оно может привести к тяжёлой тобы в номинальном режиме угол нагрузки  и запас по моменту и активной маварии в электрической сети. Поэтому синхронные машины проектируются так, чощности составлял не менее 1,65.
и запас по моменту и активной маварии в электрической сети. Поэтому синхронные машины проектируются так, чощности составлял не менее 1,65.
Механической характеристикой синхронного двигателя называется зависимость частоты вращения от момента двигателя. В синхронном двигателе частота вращения ротора постоянна и от нагрузки не зависит. Поэтому механическая характеристика n(M) (рис. 4.18) – прямая, параллельная оси абсцисс.
Вопрос 29. Параметры синхронных машин. Суть метода двух реакций.
Параметрами синхронной машины называют активные и индуктивные сопротивления обмоток и соответствующие постоянные времени. Они определяются геометрией воздушного зазора, основными размерами, обмоточными данными и электромагнитными нагрузками и, связывая входные и выходные величины, позволяют провести расчет рабочих характеристик, нагрузочной способности, установившихся и переходных режимов, ударных токов короткого замыкания, выполнить построение векторных диаграмм, а также целого ряда других задач, имеющих важное практическое значение.
Индуктивное сопротивление обмотки x=w1L можно определить, используя выражение для потокосцепления  ,
,
где магнитный поток  .
.
В соответствии с теорией синхронных машин, основанной на методе двух реакций, принято различать индуктивные сопротивления для двух характерных положений: индуктивное сопротивление по продольной оси, соответствующее случаю, когда ось вращающегося поля совпадает с продольной осью ( с осью полюсов) d, и индуктивное сопротивление по поперечной оси, соответствующее случаю, когда с осью вращающегося поля якоря совпадает поперечная ось q, смещенная на 90 электрических градусов относительно продольной.
Указанные индуктивные сопротивления определяются только собственными и взаимными индуктивностями обмотки якоря, так как при симметричном установившемся режиме работы отсутствуют трансформаторные связи обмотки якоря с обмотками ротора (возбуждения, демпферной).
При резком изменении режима работы (например, сброс или наброс нагрузки) в обмотках ротора будут индуктироваться токи, которые оказывают экранирующее влияние на магнитный поток реакций якоря. В результате индуктивные сопротивления обмоток якоря в переходных режимах оказываются значительно ниже, чем в установившемся синхронном режиме, и будут различными по продольной и поперечной осям, даже в случае синхронной неявнополюсной машины. Это объясняется несимметричным размещением обмотки возбуждения, ось которой совпадает с продольной осью машины.
Вопрос 30. Синхронно-реактивные двигатели
В статоре синхронного электродвигателя размещается обмотка, подключаемая к сети трехфазного тока и образующая вращающееся магнитное поле. Ротор двигателя состоит из сердечника с обмоткой возбуждения. Обмотка возбуждения через контактные кольца подключается к источнику постоянного тока. Ток обмотки возбуждения создает магнитное поле, намагничивающее ротор.
Реактивный двигатель представляет собой явнополюсную синхронную машину без обмотки возбуждения. Поток двигателя и его вращающий момент создается м. д. с. реакции якоря, отсюда и название — реактивный двигатель. Момент двигателя Мдвозникает за счет дополнительной мощности Рд, имеющей место вследствие неодинаковой проводимости ротора по осям d и q.Наивыгоднейшим отношением xq/xd можно считать величину, близкую к 0,5. Роторы, в основном, выполняются двух типов: со впадинами и секционированные.

У реактивных двигателей отсутствует начальный пусковой момент. Поэтому их роторы снабжаются короткозамкнутой пусковой обмоткой.
Реактивные двигатели проще по конструкции, надежнее в работе и дешевле по сравнению с синхронными двигателями с обмоткой возбуждения на роторе; при их использовании не требуется иметь источник постоянного тока для питания цепи возбуждения; отсутствие колебаний ротора и высокую надежность работы. Основными недостатками реактивного двигателя являются сравнительно небольшой пусковой момент и низкий cos φ, не превышающий обычно 0,5. Это объясняется тем, что магнитный поток создается только за счет реактивного тока обмотки якоря, значение которого из-за повышенного сопротивления магнитной цепи машины довольно велико. У двигателей мощностью в несколько десятков ватт η=35÷40%, а у двигателей мощностью в несколько ватт η<25%.
Вопрос 31. Синхронный компенсатор
Синхронный компенсатор представляет собой синхронный двигатель, работающий без нагрузки на валу; при этом по обмотке якоря проходит практически только реактивный ток.
Обычно электрическая сеть, питающая электроэнергией промышленные предприятия, нагружена током Iн, отстающим по фазе от напряжения сети Uc. Это объясняется тем, что от сети получают питание асинхронные двигатели, у которых реактивная составляющая тока довольно велика. Для улучшения cos φ сети синхронный компенсатор должен работать в режиме перевозбуждения. При этом ток возбуждения регулируется так, чтобы ток якоря Íасинхронного компенсатора опережал на 90° напряжение сети Úc и был примерно равен реактивной составляющей Íн.р тока нагрузки Íн . В результате сеть загружается только активным током нагрузки Íс= Íн.а .
 |
Если напряжение сети в точке подключения синхронного компенсатора несколько понижается из-за возрастания тока нагрузки Iн и становится меньше Uс.ном , то синхронный компенсатор начинает забирать из сети реактивный опережающий ток Íа. Это уменьшает падение напряжения в ней на величину ΔUк = Ia Xc . При повышении напряжения в сети, когда Uc > Uс.ном , синхронный компенсатор загружает сеть реактивным отстающим током Íа, что приводит к увеличению падения напряжения на величину ΔUк = IaXc . При достаточной мощности синхронного компенсатора колебания напряжения в сети не превышают 0,5 —1,0 %. Недостатком указанного метода стабилизации напряжения является то, что синхронный компенсатор загружает линию реактивным током, увеличивая потери в ней.
Вопрос 32. Синхронные двигатели с постоянными магнитами
Синхронные двигатели с постоянными магнитами довольно просты по конструкции, надежны в работе и обладают значительной устойчивостью.
Электромагнитные процессы в машинах с постоянными магнитами протекают так же, как и в генераторах с электромагнитным возбуждением. Однако значительная реакция якоря во время пуска или при коротком замыкании может вызвать необратимое размагничивание постоянных магнитов, в результате чего после снятия размагничивающего действия свойства постоянного магнита не будут полностью восстановлены. Для уменьшения действия реакции якоря на постоянные магниты расстояние между полюсными наконечниками соседних полюсов делают значительно меньше, чем в машинах с электромагнитным возбуждением. В этом случае поток реакции якоря Фqв значительной степени замыкается через полюсные наконечники, не подвергая размагничиванию постоянные магниты.
Для возможности пуска в полюсных наконечниках располагается пусковая короткозамкнутая обмотка, выполненная по типу «беличьей клетки». При разгоне поток постоянных магнитов индуктирует в обмотке якоря э. д. с, которая имеет частоту вращения f = f1(1—s). Вызываемый этой э. д. с. ток замыкается через сеть и создает потери, покрываемые за счет подводимой к ротору механической мощности Рт. В результате на ротор при пуске двигателя действует тормозной момент величина которого зависит от скольжения s. Тормозной момент Мт обычно имеет максимум при скольжении s = 0,9÷0,6.
В машинах с электромагнитным возбуждением э. д. с. Е0определяется лишь остаточным намагничиванием и имеет величину, не превышающую нескольких процентов. Поэтому
в двигателе с постоянными магнитами ток Iп имеет значительно большую величину.
Рабочие характеристики двигателей с постоянными магнита ми мало отличаются от характеристик двигателей с обмоткой возбуждения.

Недостатком двигателей с постоянными магнитами является сравнительно низкий коэффициент мощности и сложность изготовления ротора.
Вопрос 33. Включение генераторов на параллельную работу.
На электрических станциях обычно устанавливают несколько синхронных генераторов, включаемых параллельно для совместной работы (рис. 21.1). Наличие нескольких генераторов вместо одного суммарной мощности дает преимущества, объясняемые теми же соображениями, которые были изложены применительно к параллельной работе трансформаторов (см. § 2.2).
При включении синхронного генератора в сеть на параллельную работу необходимо соблюдать следующие условия: ЭДС генератора  в момент подключения его к сети должна быть равна и противоположна по фазе напряжению сети (
в момент подключения его к сети должна быть равна и противоположна по фазе напряжению сети (  ),частота ЭДС генератора
),частота ЭДС генератора  должна быть равна частоте переменного напряжения в сети
должна быть равна частоте переменного напряжения в сети  ; порядок следования фаз на выводах генератора должен быть таким же, что и на зажимах сети.
; порядок следования фаз на выводах генератора должен быть таким же, что и на зажимах сети.
Приведение генератора в состояние, удовлетворяющее всем указанным условиям, называют синхронизацией. Несоблюдение любого из условий синхронизации приводит к появлению в обмотке статора больших уравнительных токов, чрезмерное значение которых может явиться причиной аварии.
Включить генератор в сеть с параллельно работающими генераторами можно или способом точной синхронизации, или способом самосинхронизации
Способ точной синхронизации. Сущность этого способа состоит в том, что, прежде чем включить генератор в сеть, его приводят в состояние, удовлетворяющее всем вышеперечисленным условиям. Момент соблюдения этих условий, т. е. момент синхронизации, определяют прибором, называемым синхроноскопом. По конструкции синхроноскопы разделяют на стрелочные и ламповые. Рассмотрим процесс синхронизации генераторов с применением лампового синхроноскопа, который состоит из трех ламп1, 2, 3, расположенных в вершинах равностороннего треугольника.
При включении ламп по схеме «на погасание» (рис. 21.2, а) момент синхронизации соответствует одновременному погасанию всех ламп. Предположим, что звезда ЭДС генератора  вращается с угловой частотой
вращается с угловой частотой  , превышающей угловую частоту
, превышающей угловую частоту
вращения  звезды напряжений сети
звезды напряжений сети  .В этом случае напряжение на лампах определяется геометрической суммой
.В этом случае напряжение на лампах определяется геометрической суммой  +
+  ;
;  +
+  ;
;  +
+  (рис. 21.2, б).
(рис. 21.2, б).

Рис. 21.1. Включение синхронных генераторов
на параллельную работу:
Г1 - Г4 – синхронные генераторы,ПД1 -ПД4 - приводные двигатели
В момент совпадения векторов звезды ЭДС с векторами звезды напряжений эта сумма достигает наибольшего значения, при этом лампы горят с наибольшим накалом (напряжение на лампах равно удвоенному напряжению сети). В последующие моменты времени звезда ЭДС обгоняет звезду напряжений, и напряжение на лампах уменьшается. В момент синхронизации векторы ЭДС и напряжений занимают положение, при котором  , т.е.
, т.е.  = 0, и все три лампы одновременно гаснут (рис. 21.2, в). При большой разности угловых частот и
= 0, и все три лампы одновременно гаснут (рис. 21.2, в). При большой разности угловых частот и  лампы вспыхивают часто. Изменяя частоту вращения первичного двигателя, добиваются равенства
лампы вспыхивают часто. Изменяя частоту вращения первичного двигателя, добиваются равенства  , очем будет свидетельствовать погасание ламп на длительное время. В этот момент и следует замкнуть рубильник, после чего генератор окажется подключенным к сети.
, очем будет свидетельствовать погасание ламп на длительное время. В этот момент и следует замкнуть рубильник, после чего генератор окажется подключенным к сети.

Рис. 21.2. Ламповый синхроноскоп
Способ самосинхронизации . Ротор невозбужденного генератора приводят во вращение первичным двигателем до частоты вращения, отличающейся от синхронной не более чем на 2—5%, затем генератор подключают к сети. Для того чтобы избежать перенапряжений в обмотке ротора в момент подключения генератора к сети, ее замыкают на некоторое активное Сопротивление. Так как в момент подключения генератора к сети его ЭДС равна нулю (генератор не возбужден), то под действием напряжения сети в обмотке статора наблюдается резкий бросок тока, превышающий номинальное значение тока генератора. Вслед за включением обмотки статора в сеть подключают обмотку возбуждения к источнику постоянного тока и синхронный генератор под действием электромагнитного момента, действующего на его ротор, втягивается в синхронизм, т. е. частота вращения ротора становится синхронной. При этом ток статора быстро уменьшается.
При самосинхронизации в генераторе протекают сложные электромеханические переходные процессы, вызывающие значительные механические воздействия на обмотки, подшипники и муфту, соединяющую генератор с турбиной. Влияние этих воздействий на надежность генератора учитывается при проектировании синхронных генераторов. Способ самосинхронизации (грубой синхронизации) обычно применяют в генераторах при их частых включениях. Этот способ прост и легко автоматизируется.
Вопрос 34. Угловые характеристики синхронного генератора
Электромагнитная мощность неявнополюсногосинхронного генератора при его параллельной работе с сетью
 (21.7)
(21.7)
где - угол, на который продольная ось ротора смещена относительно продольной оси результирующего поля машины (рис. 21.4).
Электромагнитная мощность явнополюсного синхронного генератора
 (21.8)
(21.8)
где  и
и  — синхронные индуктивные сопротивления явнополюсной синхронной машины по продольно и поперечной осям соответственно, Ом.
— синхронные индуктивные сопротивления явнополюсной синхронной машины по продольно и поперечной осям соответственно, Ом.
Разделив выражения (21.7) и (21.8) на синхронную угловую скорость вращения , получим выражения электромагнитных моментов:
неявнополюсной синхронной машины
 (21.9)
(21.9)
явнополюсной синхронной машины
 (21.10)
(21.10)
где М — электромагнитный момент, Нм.
Анализ выражения (21.10) показывает, что электромагнитный момент явнополюсной машины имеет две составляющие: одна из них представляет собой основную составляющую электромагнитного момента
 . (21.11)
. (21.11)
другая — реактивную составляющую момента
 . (21.12)
. (21.12)
Основная составляющая электромагнитного момента  явнополюсной синхронной машины зависит не только от напряжения сети (
явнополюсной синхронной машины зависит не только от напряжения сети (  U1), но и от ЭДС
U1), но и от ЭДС  , наведенной магнитным потоком вращающегося ротора
, наведенной магнитным потоком вращающегося ротора  в обмотке статора:
в обмотке статора:
 .(21.13)
.(21.13)
Это свидетельствует о том, что основная составляющая электромагнитного момента зависит от магнитного потока ротора: ≡ . Отсюда следует, что в машине с невозбужденным ротором (= 0) основная составляющая момента = 0.
Реактивная составляющая электромагнитного момента  не зависит от магнитного потока полюсов ротора. Для возникновения этой составляющей достаточно двух условий: во-первых, чтобы ротор машины имел явновыраженные полюсы (
не зависит от магнитного потока полюсов ротора. Для возникновения этой составляющей достаточно двух условий: во-первых, чтобы ротор машины имел явновыраженные полюсы (  ) и, во-вторых, чтобы к обмотке статора было подведено напряжение сети (
) и, во-вторых, чтобы к обмотке статора было подведено напряжение сети (  ≡
≡  ). Подробнее физическая сущность реактивного момента будет изложена в § 23.2.
). Подробнее физическая сущность реактивного момента будет изложена в § 23.2.
studlib.info
 Принцип действия основан на использовании явления вращающегося магнитного поля, создаваемого обмотками статора.
Принцип действия основан на использовании явления вращающегося магнитного поля, создаваемого обмотками статора.
Примечание: для упрощения понимания создания вращающегося магнитного поля следует вспомнить об обратимости электрических и электромагнитных явлений. Так, например, для получения 3-х фазного переменного напряжения при помощи 3-х фазного генератора необходимо было вращать ротор с его магнитным полем. Но если, наоборот, подать 3-х фазное напряжения на статорные обмотки, то они создают вращающееся магнитное поле. Причем, за один период изменения тока в любой статорной обмотке магнитное поле повернётся на 360 градусов, т.е. на 1 оборот.
Простейший асинхронный двигатель состоит из статора и ротора. В пазах сердечника статора укладывают 3 обмотки, смещенные относительно друг друга на 120 градусов. Концы обмоток выводятся в клемную коробку двигателя, где они соединяются между собой или по схеме «звезда» или «треугольник».
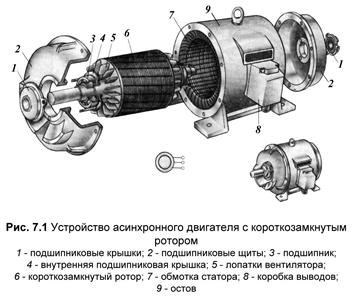 Ротор представляет собой вал с шихтованным сердечником и в пазы сердечника, без изоляции, укладывают обмотку типа «беличьей клетки». Такой ротор называют короткозамкнутым. В маломощных машинах обмотку ротора выполняют заливкой алюминиевого сплава в пазы ротора. При этом отливку выполняют за одно целое с короткозамыкающими кольцами и лопатками вентилятора.
Ротор представляет собой вал с шихтованным сердечником и в пазы сердечника, без изоляции, укладывают обмотку типа «беличьей клетки». Такой ротор называют короткозамкнутым. В маломощных машинах обмотку ротора выполняют заливкой алюминиевого сплава в пазы ротора. При этом отливку выполняют за одно целое с короткозамыкающими кольцами и лопатками вентилятора.
Принцип действия:
При подаче 3-х фазного напряжения на статорные обмотки двигателя они создают вращающееся магнитное поле. Данное магнитное поле пересекает проводники ротора и в них индуктируется ЭДС. Так как проводники ротора замкнуты между собой, то под действием ЭДС по ним потечет ток. На проводники с током ротора, находящимся в магнитном поле статора, будут действовать выталкивающие силы. Эти выталкивающие силы и создают вращающий момент на валу ротора, под действием которого ротор вращается в ту же сторону, куда вращается магнитное поле статора.
Частота вращения магнитного поля статора обозначается – n1,и определяется по формуле:
n1= 60f/P
где: f – частота питающего тока
P –число пар полюсов
60 –коэффициент перевода единиц измерения из об/сек в об/мин
На локомотивах применяют асинхронные двигатели с разным количеством обмоток. Причем, количество обмоток всегда кратно 3. Таким образом, двигатели могут иметь 3 обмотки, 6 обмоток, 9 обмоток и т.д. Каждые 3 обмотки у асинхронного двигателя приравнивается к одной паре полюсов. Соответственно, при увеличении количества статорных обмоток частота вращения магнитного поля уменьшается.
Данные о величине частоты вращения разнополюсных машин при питании током промышленной частоты (f=50Гц) приведены в таблице:
| Количество статорных обмоток | Количество пар полюсов (Р) | Подсчет n1 по формуле | Значение n1 ( об/мин) | Примечание |
| 60×50/1 | 3 обмотки по кругу занимают пространство 3600, поэтому за один период изменения тока магнитное поле повернется на3600. | |||
| 60×50/2 | 3 обмотки из 6 по кругу занимают пространство 1800, поэтому за один период изменения тока магнитное поле повернется на1800. | |||
| 60×50/3 | 3 обмотки из 9 по кругу занимают пространство 1200, поэтому за один период изменения тока магнитное поле повернется на1200. |
Частота вращения ротора обозначается – n2
Для того, чтобы на валу ротора создавался вращающий момент, необходимо выполнение данного условия:
n2‹ n1
Поэтому такие двигатели называются асинхронными. Приставка «а» означает «не», то есть несинхронные двигатели.
Отставание ротора от магнитного поля статора характеризуется скольжением (S). Скольжение определяется по данной формуле:
S= (n1 –n2)/ n1 ×100%
Скольжение показывает, на сколько процентов частота вращения ротора меньше частоты вращения магнитного поля статорных обмоток. Значение n2 при определенном скольжении для различных асинхронных двигателей приведены в таблице:
| Количество статорных обмоток | Количество пар полюсов (Р) | n1 (об/мин) | S (%) | S (об/мин) | n2 (об/мин) |
 Механическая характеристика и свойства асинхронных двигателей.
Механическая характеристика и свойства асинхронных двигателей.
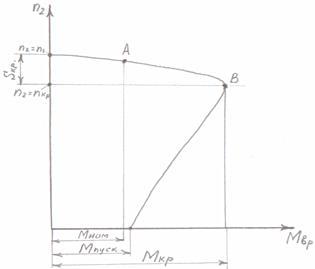
Механическая характеристика – представляет собой графическую зависимость частоты вращения ротора (n2) от величины вращающего момента (Мвр). При снятии данной характеристики вращающий момент изменяют за счет изменения механической нагрузки на валу двигателя.
Данная характеристика показывает:
1. При Мвр=0, частота вращения ротора(n2) равна частоте вращения магнитного поля статорных обмоток (n1). Но в реальности, даже в режиме холостого хода, на вал двигателя будет действовать момент сопротивления (трение в подшипниках крепления вала, сопротивления от воздушной среды и т.д.). Поэтому, по принципу саморегулирования, на валу двигателя всегда будет создаваться вращающий момент, компенсирующий момент сопротивления. Следовательно, всегда будет выполняться условие n2‹ n1
2. Верхняя часть характеристики до точки В считается рабочей. По этой части характеристики видно, что при увеличении механической нагрузки на валу частота вращения ротора уменьшается незначительно. Соответственно, асинхронный двигатель обладает жесткой частотной характеристикой.
3. В точке В асинхронный двигатель развивает максимальный вращающий момент, который называется критическим моментом. Для большинства асинхронных двигателей такой момент возникает при величине скольжения Sкрит=10-20%.Если величина механической нагрузки будет больше Мкр, то происходит «опрокидование» двигателя, то есть вращающий момент резко уменьшается и ротор останавливается. Данный процесс показан нижней частью механической характеристики.
www.poznayka.org
Для того чтобы параметры ротора и статора изобразить на одной векторной диаграмме асинхронного двигателя, произведем приведение параметров обмотки ротора к параметрам обмотки статора. При этом обмотку ротора с числом фаз m2, обмоточным коэффициентом k2 и числом витков W2 заменяют обмоткой с m1×k1×W1, соблюдая при этом энергетический баланс в роторе.
Не останавливаясь на методике приведения параметров, которая повторяется из статьи «приведенный трансформатор», перепишем основные уравнения приведенного асинхронного двигателя:



Вопрос 21. Механические характеристики АД
 .
. 

 График соответствующий уравнению (1) (U1 = const)
График соответствующий уравнению (1) (U1 = const)
На графике можно выделить три возможных режима работы: генераторный –∞ < s < 0; двигательный 0 < s < 1 и тормозной 1 < s < ∞.
Нормальная работа двигателя обычно протекает на линейном участке. Здесь находится точка номинального режима работы. Номинальный момент Mном соответствует номинальному скольжению sном = 0,01…0,05. Максимальный момент соответствует критическому скольжению sкр = 0,07…0,015. Кратность максимального момента к номинальному  . Более высокие значения kм соотв-ют АД с меньшим числом полюсов.
. Более высокие значения kм соотв-ют АД с меньшим числом полюсов.
 .
.
Момент при скольжении s = 1 называется пусковым Mп. Кратность пускового момента к номинальному 
Механическую характеристику можно представить в виде зависимости ω = f(M). Для этого в уравнении (1) ω1 заменяется на ω = ω1 ∙ (1 – s). Для получения выражения для Mmax необходимо уравнение (1) продифференцировать по s и приравнять нулю, то есть  . В результате получим
. В результате получим  .
.
Подставив sкр в (1), получим  .
.
При малых значениях s << 1 электромагнитный момент будет равен  .
.
При s близких к единице можно пренебречь активными сопротивлениями обмоток статора r1 и ротора r′2, так как они малы по сравнению с их индуктивными сопротивлениями. Тогда можно записать  .
.
Вопрос 22. АД с фазным ротором
Широкое распространение трехфазных асинхронных двигателей объясняется простотой их конструкции, надежностью в работе, хорошими эксплуатационными свойствами, невысокой стоимостью и простотой в обслуживании.
Устройство асинхронных электродвигателей с фазным ротором:
Основными частями любого асинхронного двигателя является неподвижная часть – статор и вращающая часть, называемая ротором. Статор трехфазного асинхронного двигателя состоит из шихтованного магнитопровода, запрессованного в литую станину. На внутренней поверхности магнитопровода имеются пазы для укладки проводников обмотки. Эти проводники являются сторонами многовитковых мягких катушек, образующих три фазы обмотки статора. Геометрические оси катушек сдвинуты в пространстве друг относительно друга на 120 градусов.
Фазы обмотки можно соединить по схеме ''звезда'' или "треугольник" в зависимости от напряжения сети. Например, если в паспорте двигателя указаны напряжения 220/380 В, то при напряжении сети 380 В фазы соединяют "звездой". Если же напряжение сети 220 В, то обмотки соединяют в "треугольник". В обоих случаях фазное напряжение двигателя равно 220 В.
Ротор трехфазного асинхронного двигателя представляет собой цилиндр, набранный из штампованных листов электротехнической стали и насаженный на вал. В зависимости от типа обмотки роторы трехфазных асинхронных двигателей делятся на короткозамкнутые и фазные.
 В асинхронных электродвигателях большей мощности и специальных машинах малой мощности для улучшения пусковых и регулировочных свойств применяются фазные роторы. В этих случаях на роторе укладывается трехфазная обмотка с геометрическими осями фазных катушек (1), сдвинутыми в пространстве друг относительно друга на 120 градусов.
В асинхронных электродвигателях большей мощности и специальных машинах малой мощности для улучшения пусковых и регулировочных свойств применяются фазные роторы. В этих случаях на роторе укладывается трехфазная обмотка с геометрическими осями фазных катушек (1), сдвинутыми в пространстве друг относительно друга на 120 градусов.
Фазы обмотки соединяются звездой и концы их присоединяются к трем контактным кольцам (3), насаженным на вал (2) и электрически изолированным как от вала, так и друг от друга. С помощью щеток (4), находящихся в скользящем контакте с кольцами (3), имеется возможность включать в цепи фазных обмоток регулировочные реостаты (5).
Асинхронный двигатель с фазным ротором имеет лучшие пусковые и регулировочные свойства, однако ему присущи большие масса, размеры и стоимость, чем асинхронному двигателю с короткозамкнутым ротором.
Принцип работы асинхронных электродвигателей
Принцип работы асинхронной машины основан на использовании вращающегося магнитного поля. При подключении к сети трехфазной обмотки статора создается вращающееся магнитное поле, угловая скорость которого определяется частотой сети f и числом пар полюсов обмотки p, т. е. ω1=2πf/p
 Пересекая проводники обмотки статора и ротора, это поле индуктирует в обмотках ЭДС (согласно закону электромагнитной индукции). При замкнутой обмотке ротора ее ЭДС наводит в цепи ротора ток. В результате взаимодействия тока с результирующим малнитным полем создается электромагнитный момент. Если этот момент превышает момент сопротивления на валу двигателя, вал начинает вращаться и приводить в движение рабочий механизм. Обычно угловая скорость ротора ω2 не равна угловой скорости магнитного поля ω1, называемой синхронной. Отсюда и название двигателя асинхронный, т. е. несинхронный.
Пересекая проводники обмотки статора и ротора, это поле индуктирует в обмотках ЭДС (согласно закону электромагнитной индукции). При замкнутой обмотке ротора ее ЭДС наводит в цепи ротора ток. В результате взаимодействия тока с результирующим малнитным полем создается электромагнитный момент. Если этот момент превышает момент сопротивления на валу двигателя, вал начинает вращаться и приводить в движение рабочий механизм. Обычно угловая скорость ротора ω2 не равна угловой скорости магнитного поля ω1, называемой синхронной. Отсюда и название двигателя асинхронный, т. е. несинхронный.
Работа асинхронной машины характеризуется скольжением s, которое представляет собой относительную разность угловых скоростей поля ω1 и ротора ω2: s=(ω1-ω2)/ω1
Значение и знак скольжения, зависящие от угловой скорости ротора относительно магнитного поля, определяют режим работы асинхронной машины. Так, в режиме идеального холостого хода ротор и магнитное поле вращаются с одинаковой частотой в одном направлении, скольжение s=0, ротор неподвижен относительно вращающегося магнитного пол, ЭДС в его обмотке не индуктируется, ток ротора и электромагнитный момент машины равны нулю. При пуске ротор в первый момент времени неподвижен: ω2=0, s=1. В общем случае скольжение в двигательном режиме изменяется от s=1 при пуске до s=0 в режиме идеального холостого хода.
При вращении ротора со скоростью ω2>ω1 в направлении вращения магнитного поля скольжение становится отрицательным. Машина переходит в генераторный режим и развивает тормозной момент. При вращении ротора в направлении, противоположном направлению вращения магнитного поли (s>1), асинхронная машина переходит в режим противовключения и также развивает тормозной момент. Таким образом, в зависимости от скольжения различают двигательный (s=1÷0), генераторный (s=0÷-∞) режимы и режим противовключення (s=1÷+∞). Режимы генераторный и противовключения используют для торможения асинхронных двигателей.
Вопрос 23. Реостатный пуск асинхронных двигателей
Этот способ применяют при тяжелых условия пуска, т.е. при большой нагрузке на валу. Для реостатного пуска используют асинхронные двигатели с фазным ротором, в цепь ротора включается пусковой реостат. Реостатный пуск служит для увеличения пускового момента. Одновременно происходит уменьшение пускового тока двигателя. По мере разгона двигателя пусковой реостат выводится и после окончания пуска обмотка ротора оказывается замкнутой накоротко.

Рисунок 2.19
В момент пуска в ход (рис. 2.19.а) в цепь ротора введен полностью пусковой реостат (Rпуск3=Rпуск1+Rпуск2), для чего контакты релеК1 и К2 разомкнуты. При этом двигатель будет запускаться по характеристике 3 (рис. 2.19.б) под действием пускового момента Mпуск. При заданной нагрузке на валу и введенном реостате Rпуск3 разгон закончится в точке A. Для дальнейшего разгона двигателя нужно замкнуть контакты К1, при этом сопротивление пускового реостата снизится до Rпуск2 и разгон будет продолжаться по характеристике 2 до точки B. При замыкании контактов К2, пусковой реостат будет полностью выведен (Rпуск=0) и окончательный разгон двигателя будет продолжаться по его естественной механической характеристике 1 и закончится в точке C.
Критическое скольжение равно:
для естественной характеристики Sкр1≈R2/X2;
для искусственной характеристики Sкр3≈(R2+Rпуск3)/X2.
Пусковой момент для искусственной характеристики можно рассчитать по формуле Клосса
| Mпуск = | 2Mкр | . |
| Sкр3/1+1/Sкр3 |
Задаваясь необходимой величиной пускового момента, можно вычислить Sкр3 и величину пускового сопротивления
| Sкр | = | R2 | . | |
| Sкр3 | R2+Rпуск3 | |||
Вопрос 24. Исполнительные асинхронные двигатели
Асинхронные исполнительные двигатели используют в системах автоматического управления для управления и регулирования различных устройств.
Асинхронные исполнительные двигатели начинают действовать при подаче им электрического сигнала, который они преобразуют в заданный угол поворота вала или в его вращение. Снятие сигнала приводит к немедленному переходу ротора исполнительного двигателя в неподвижное состояние без использования каких-либо тормозных устройств. Работа таких двигателей протекает все время в условиях переходных режимов, в результате чего скорость ротора зачастую при кратковременном сигнале не достигает установившегося значения. Этому способствуют также частые пуски, изменения направления вращения и остановки.
По конструктивному оформлению исполнительные двигатели представляют собой асинхронные машины с двухфазной обмоткой статора, выполненной так, что магнитные оси ее двух фаз сдвинуты в пространстве относительно друг друга не угол 90 эл. град.
Одна из фаз обмотки статора является обмоткой возбуждении и имеет выводы к зажимам с обозначение ми C1 и С2. Другая, выполняющая роль обмотки управления, имеет выводы, присоединенные к зажимам с обозначениями У1 и У2.
 К обеим фазам обмотки статора подводят соответствующие переменные напряжения одинаковой частоты. Так, цепь обмотки возбуждения присоединяют к питающей сети с неизменным напряжением U, а в цепь обмотки управления подают сигнал в виде напряжения управления Uу (рис. 1, а, б, в).
К обеим фазам обмотки статора подводят соответствующие переменные напряжения одинаковой частоты. Так, цепь обмотки возбуждения присоединяют к питающей сети с неизменным напряжением U, а в цепь обмотки управления подают сигнал в виде напряжения управления Uу (рис. 1, а, б, в).
Рис. 1. Схемы включения асинхронных исполнительных двигателей при управлении: а - амплитудном, б - фазовом, в - амплитудно-фазовом.
В результате этого в обеих фазах обмотки статора возникают соответствующие токи, которые благодаря включенным фазосдвигающим элементам в виде конденсаторов или фазорегулятора сдвинуты относительно друг друга во времени, что приводит к возбуждению эллиптического вращающего магнитного поля, которое вовлекает короткозамкнутый ротор во вращение.
При изменении режимов работы двигателя эллиптическое вращающееся магнитное поле в предельных случаях переходит в переменное с неподвижной осью симметрии или в круговое вращающееся, что сказывается на свойствах двигателя.
Пуск, регулирование скорости и остановка исполнительных двигателей определяются условиями формирования магнитного поля путем амплитудного, фазового и амплитудно-фазового управления.
При амплитудном управлении напряжение U на зажимах обмотки возбуждения поддерживают неизменным, а изменяют только амплитуду напряжения Uy. Сдвиг фаз между этими напряжениями, благодари исключенному конденсатору, равен 90° (рис. 1, а).
Фазовое управление харакрно тем, что напряжения U и Uy остаются неизменными, а сдвиг фаз между ними регулируют поворотом ротора фазорегулятора (рис. 1, б).
При амплитудно-фазовом управлении, хотя регулируют только амплитуду напряжения Uy, но при этом, из-за наличия конденсатора в цепи возбуждения и электромагнитного взаимодействия фаз обмотки статора, происходит одновременное изменение фазы напряжения на зажимах обмотки возбуждения и сдвига фаз между этим напряжением и напряжением на зажимах обмотки управления (рис. 1, в).
Иногда кроме конденсатора в цепи обмотки возбуждения предусматривают еще конденсатор в цепи обмотки управления, что компенсирует реактивную намагничивающую мощность, снижает потери энергии и улучшает, механические характеристики асинхронного исполнительного двигателя.
При амплитудном управлении круговое вращающееся магнитное поле наблюдается при номинальном сигнале независимо от скорости ротора, а при уменьшении его оно становится эллиптическим. В случае фазового управления круговое вращающееся магнитное поле возбуждается только при номинальном сигнале и сдвиге фаз между напряжениями U и Uy равным 90° независимо от скорости ротора, а при ином сдвиге фаз оно становится эллиптическим. При амплитудно-фазовом управлении круговое вращающееся магнитное поле существует только при одном режиме — при номинальном сигнале в момент пуска двигателя, а затем по мере разгона ротора оно переходит в эллиптическое.
При всех способах управления скорость ротора регулируют изменением характера вращающегося магнитного поля, а перемену направления вращения ротора осуществляют изменением фазы напряжения, подведенного к зажимам обмотки управления, на 180°.
К асинхронным исполнительным исполнительным двигателям предъявляют специфические требования в части отсутствия самохода, обеспечения широкого диапазона регулирования скорости ротора, быстродействия, большого начального пускового момента и малой мощности управления при относительном сохранении линейности их характеристик.
Самоход асинхронных исполнительных двигателей проявляется в виде самопроизвольного вращения ротора при отсутствии сигнала управления. Он обусловлен либо недостаточно большим активным сопротивлением обмотки ротора — методический самоход, либо некачественным исполнением самого двигателя — технологический самоход.
Первый устраним при проектировании двигателей, предусматривающем изготовление ротора с повышенным сопротивлением обмотки и критическим скольжением sкр = 2 - 4, что, кроме того, обеспечивает широкий устойчивый диапазон регулирования скорости ротора, а второй — качественным изготовлением магнитопроводов и обмоток машин при тщательной их сборке.
Так как асинхронные исполнительные двигатели с ротором, имеющим короткозамкнутую обмотку с повышенным активным сопротивлением, отличаются небольшим быстродействием, характеризуемым электромеханической постоянной времени — временем набора ротором скорости от нулевой до половины синхронной — Тм = 0,2 - 1,5 с, то в установках автоматического управления предпочтение отдают исполнительным двигателям с полым немагнитным ротором, у которых электромеханическая постоянная времени имеет меньшее значение — Тм = 0,01 - 0,15 с.
Асинхронные исполнительные двигатели с полым немагнитным ротором, отличающиеся высоким быстродействием, имеют как внешний статор с магнитопроводом обычной конструкции и двухфазной обмоткой с фазами, выполняющими роль обмоток возбуждения и управления, так и внутренний статор в виде шихтованного ферромагнитного полого цилиндра, укрепленного на подшипниковом щите двигателя.
Поверхности статоров разделены воздушным зазором, который в радиальном направлении имеет размер 0,4 - 1,5 мм. В воздушном зазоре находится стакан из алюминиевого сплава со стенкой толщиной 0,2 - 1 мм, укрепленный на валу двигателя. Ток холостого хода асинхронных двигателей с полым немагнитным ротором велик и доходит до 0,9Iном, а номинальный кпд = 0,2 - 0,4.
В установках автоматики и телемеханики применяют двигатели с полым ферромагнитным ротором, у которого толщина стенки 0.5 - 3 мм. В этих машинах, используемых в качестве исполнительных и вспомогательных двигателей, внутренний статор отсутствует, а ротор укреплен на одной запрессованной или двух торцовых металлических пробках.
Воздушный зазор между поверхностями статора и ротора в радиальном направлении составляет всего 0,2 - 0,3 мм.
Механические характеристики двигателей с полым ферромагнитным ротором ближе к линейным, чем характеристики двигателей с ротором, имеющим обычную короткозамкнутую обмотку, а также с ротором, выполненным в виде полого немагнитного цилиндра.
Иногда внешнюю поверхность полого ферромагнитного ротора покрывают слоем меди толщиной 0,05 - 0,10 мм, а его торцовые поверхности — слоем меди до 1 мм для увеличения номинальных мощности и момента двигателя, однако кпд его при этом несколько уменьшается.
Существенными недостатками двигателей с полым ферромагнитным ротором является одностороннее прилипание ротора к магнитопроводу статора из-за неравномерности воздушного зазора, чего не бывает в машинах с полым немагнитным ротором. Самоход у двигателей с полым ферромагнитным ротором отсутствует, они устойчиво работают в диапазоне скоростей от нулевой до синхронной скорости ротора.
Асинхронные исполнительные двигатели с массивным ферромагнитным ротором выполненным в виде стального или чугуного цилиндра без обмотки, отличаю простотой конструкции, высокой прочностью, большим пусковым моментом, устойчивостью работы на заданной скорости и могут быть использованы при очень высоких скоростях ротора.
Существуют обращенные двигатели с массивным ферромагнитным ротором, который выполнен в вид наружной вращающейся части.
Асинхронные исполнительные двигатели изготавливают на номинальную мощность от долей до нескольких сотен ватт и предназначают для питания от источников переменного напряжения с частотой 50 Гц, а также повышенных частот до 1000 Гц и выше.
Вопрос 25. Принцип действия синхронного генератора и синхронного двигателя
Синхронный двигатель. Принцип действия и устройство. Синхронный двигатель может работать в качестве генератора и двигателя. Синхронный двигатель выполнен так же, как и синхронный генератор. Его обмотка якоря I (рис. 291, а) подключена к источнику трехфазного переменного тока; в обмотку возбуждения 2 подается от постороннего источника постоянный ток. Благодаря взаимодействию вращающегося магнитного поля 4, созданного трехфазной обмоткой якоря, и поля, созданного обмоткой возбуждения, возникает электромагнитный момент М (рис. 291,б), приводящий ротор 3 во вращение. Однако в синхронном двигателе в отличие от асинхронного ротор будет разгоняться до частоты вращения n = n1, с которой вращается магнитное поле (до синхронной частоты вращения). Объяс-
 Рис. 291. Электрическая (а) и электромагнитная (б) схемы синхронного электродвигателя
Рис. 291. Электрическая (а) и электромагнитная (б) схемы синхронного электродвигателя
няется это тем, что ток в обмотку ротора подается от постороннего источника, а не индуцируется в нем магнитным полем статора и, следовательно, не зависит от частоты вращения вала двигателя. Характерной особенностью синхронного двигателя является постоянная частота вращения его ротора независимо от нагрузки.
Электромагнитный момент . Электромагнитный момент в синхронном двигателе возникает в результате взаимодействия магнитного потока ротора (потока возбуждения Фв) с вращающимся магнитным полем, создаваемым трехфазным током, протекающим по обмотке якоря (потоком якоря Фв). При холостом ходе машины оси магнитных полей статора и ротора совпадают (рис. 292,а). Поэтому электромагнитные силы I, возникающие между «полюсами» статора и полюсами ротора, направлены радиально (рис. 292, б) и электромагнитный момент машины равен нулю. При работе машины в двигательном режиме (рис. 292, в и г) ее ротор под действием приложенного к валу внешнего нагрузочного момента Мвн смещается на некоторый угол 0 против направления вращения. В этом случае в результате электромагнитного взаимодействия между ротором и статором создаются электромагнитные силы I, направленные по направлению вращения, т. е. образуется вращающий электромагнитный момент М, который стремится преодолеть действие внешнего момента Мвн. Максимум момента Мmaxсоответствует углу ? = 90°, когда оси полюсов ротора расположены между осями «полюсов» статора.
Если нагрузочный момент Мвн, приложенный к валу электродвигателя, станет больше Мmax, то двигатель под действием внешнего момента Мвностанавливается; при этом по обмотке якоря неподвижного двигателя будет протекать очень большой ток. Этот режим называется выпаданием из синхронизма, он является аварийным и не должен допускаться.
При работе машины в генераторном режиме (рис. 292, д и е) ротор под действием приложенного к валу внешнего момента Мвн смещается на угол ? по направлению вращения. При этом создаются электромагнитные силы, направленные против вращения, т. е. образуется тормозной электромагнитный момент М. Таким образом, при изменении значения и направления внешнего момента на валу ротора Мвн изменяется лишь угол ? между осями полей статора и ротора, в то время как в асинхронной машине в этом случае изменяется частота вращения ротора.
Вопрос 26. Пуск синхронного двигателя
Синхронный двигатель не имеет начального пускового момента. Если его подключить к сети переменного тока, когда ротор неподвижен, а по обмотке возбуждения проходит постоянный ток, то за один период изменения тока, электромагнитный момент будет дважды изменять свое направление, т.е. средний момент за период равняется нулю. При этих условиях двигатель не сможет прийти во вращение, т.к. его ротор обладающий определенной инерцией, не может быть в течении одного полупериода разогнан до синхронной частоты вращения. Следовательно, для пуска синхронного двигателя необходимо разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронной.
В виду отсутствия пускового момента в синхронном двигателе для пуска его используют следующие способы:
1. Пуск с помощью вспомогательного двигателя.
2. Асинхронный пуск двигателя.
1. Пуск с помощью вспомогательного двигателя.
Пуск в ход синхронного двигателя с помощью вспомогательного двигателя может быть произведен только без механической нагрузки на его валу, т.е. практически вхолостую. В этом случае на период пуска двигатель временно превращается в синхронный генератор, ротор которого приводится во вращение небольшим вспомогательным двигателем. Статор этого генератора включается параллельно в сеть с соблюдением всех необходимых условий этого соединения. После включения статора в сеть вспомогательный приводной двигатель механически отключается. Этот способ пуска сложен и имеет к тому же вспомогательный двигатель.
2. Асинхронный пуск двигателя.
Наиболее распространенным способом пуска синхронных двигателей является асинхронный пуск, при котором синхронный двигатель на время пуска превращается в асинхронный. Для возможности образования асинхронного пускового момента в пазах полюсных наконечников явнополюсного двигателя помещается пусковая короткозамкнутая обмотка. Эта обмотка состоит из латунных стержней, вставленных в пазы наконечников и соединяемых накоротко с обоих торцов медными кольцами.
При пуске в ход двигателя обмотка статора включается в сеть переменного тока. Обмотка возбуждения (3) на период пуска замыкается на некоторое сопротивление Rг, рис. 45, ключ К находится в положении 2, сопротивление Rг = (8-10)Rв. В начальный момент пуска при S=1, из-за большого числа витков обмотки возбуждения, вращающее магнитное поле статора наведет в обмотке возбуждения ЭДС Ев, которая может достигнуть весьма большого значения и если при пуске не включить обмотку возбуждения на сопротивление Rг произойдет пробой изоляции.

Рис. 45 Рис. 46.
Процесс пуска синхронного двигателя осуществляется в два этапа. При включении обмотки статора (1) в сеть в двигателе образуется вращающее поле, которое наведет в короткозамкнутой обмотке ротора (2) ЭДС. Под действием, которой будет протекать в стержнях ток. В результате взаимодействия вращающего магнитного поля с током в коротко замкнутой обмотке создается вращающий момент, как у асинхронного двигателя. За счет этого момента ротор разгоняется до скольжения близкого к нулю (S=0,05), рис. 46. На этом заканчивается первый этап.
Чтобы ротор двигателя втянулся в синхронизм, необходимо создать в нем магнитное поле включением в обмотку возбуждения (3) постоянного тока (переключив ключ К в положение 1). Так как ротор разогнан до скорости близкой к синхронной, то относительная скорость поля статора и ротора небольшая. Полюса плавно будут находить друг на друга. И после ряда проскальзываний противоположные полюса притянутся, и ротор втянется в синхронизм. После чего ротор будет вращаться с синхронной скоростью, и частота вращения его будет постоянной, рис. 46. На этом заканчивается второй этап пуска.
Вопрос 27. Работа синхронного генератора под нагрузкой
Рассмотрим работу трехфазного синхронного генератора при симметричной нагрузке, когда он работает независимо от других синхронных машин. При симметричной нагрузке в фазных обмотках проходят одинаковые токи, сдвинутые по фазе на угол 2π/3. Эти токи создают магнитное поле, которое вращается относительно якоря в ту же сторону и с той же частотой, что и поле обмотки возбуждения (ротора). Таким образом, магнитные потоки возбуждения ФBи якоря Фaв синхронной машине взаимно неподвижны. В машине, работающей под нагрузкой, т. е. когда токи в фазах статора не равны нулю, результирующий магнитный поток Фрезв отличие от холостого хода создается не только м. д. с. обмотки возбуждения, но и м. д. с. обмотки якоря. Воздействие м. д. с. якоря на поле синхронной машины, создаваемое обмоткой возбуждения, называется реакцией якоря. Следовательно, под действием реакции якоря изменяется результирующий магнитный поток и, естественно, напряжение генератора, причем реакция якоря и напряжение генератора зависят от значения и характера нагрузки, значения м. д. с. обмотки возбуждения, свойств магнитной системы машины и т. д. Магнитное поле якоря в зависимости от того, на какую нагрузку работает генератор, будет или ослаблять основное поле полюсов, или усиливать его. В зависимости от характера нагрузки ток синхронного генератора может совпадать по фазе с э. д. с. Е0, наведенной потоком полюсов Ф0, или отставать, или опережать Е0.
Рассмотрим влияние реакции якоря на рабочие свойства синхронного генератора при различных углах сдвига фаз ψ между э. д. с. Е0и токомIв обмотке якоря. Угол ψ зависит от характера нагрузки, т. е. от сопротивленийr, XLи ХC. Поэтому рассмотрим реакцию якоря трехфазного генератора с явно выраженными полюсами для трех частных случаев нагрузки: активной, индуктивной и емкостной.
Р еакция якоря при активной нагрузке . При активной нагрузке угол сдвига фаз ψ между э. д. с.E0и токомIв каждой фазе обмотки якоря равен нулю, т.е. ψ=0 (рис. 13.5,б). Так как магнитные потоки якоря и полюсов относительно друг друга неподвижны, то реакцию якоря можно рассматривать для какого-то определенного момента времени, например, когда ток в одной из фаз достигает максимального значения. В этом случае отпадает необходимость в изображении всех трех фаз, так как амплитуда результирующего потока трехфазной машины, как известно, совпадает с амплитудой потока той фазы, в которой в данный момент ток максимален. На рис. 13.5, а показаны полюсы машины и одна фаза якоря, причем последняя заменена одной катушкой. Так как при ψ = 0 э. д. с.E0совпадает по фазе с токомI, то ток имеет максимальное значение в тот же момент, что и э. д. с., т. е. когда стороны катушки находятся под серединами полюсов. Так как магнитное поле якоря вызывается током его обмотки, то значение этого поля в рассматриваемый момент наибольшее. Направление поля реакции якоря находится по правилу правоходового винта. Из рис. 13.5, а видно, что поле реакции якоря ослабляет поле полюсов под набегающим краем полюса и усиливает его под убегающим краем, при этом поле якоря Фаq, по отношению к оси полюсов является поперечным. Если магнитная система генератора не насыщена, то, когда полюсы расположены непосредственно под проводниками якоря, результирующий поток (Фрез) почти не изменяется по значению, а лишь несколько «перекашивается». В случае насыщенной магнитной системы машины усиление поля под сбегающим краем полюса несколько меньше, чем его ослабление под набегающим краем, в результате чего суммарное поле несколько уменьшится. Для учета влияния поперечного поля реакции якоря Фаqсчитают, что оно индуцирует в обмотке якоря э. д. с. Еaq(рис. 13.5,б).
еакция якоря при активной нагрузке . При активной нагрузке угол сдвига фаз ψ между э. д. с.E0и токомIв каждой фазе обмотки якоря равен нулю, т.е. ψ=0 (рис. 13.5,б). Так как магнитные потоки якоря и полюсов относительно друг друга неподвижны, то реакцию якоря можно рассматривать для какого-то определенного момента времени, например, когда ток в одной из фаз достигает максимального значения. В этом случае отпадает необходимость в изображении всех трех фаз, так как амплитуда результирующего потока трехфазной машины, как известно, совпадает с амплитудой потока той фазы, в которой в данный момент ток максимален. На рис. 13.5, а показаны полюсы машины и одна фаза якоря, причем последняя заменена одной катушкой. Так как при ψ = 0 э. д. с.E0совпадает по фазе с токомI, то ток имеет максимальное значение в тот же момент, что и э. д. с., т. е. когда стороны катушки находятся под серединами полюсов. Так как магнитное поле якоря вызывается током его обмотки, то значение этого поля в рассматриваемый момент наибольшее. Направление поля реакции якоря находится по правилу правоходового винта. Из рис. 13.5, а видно, что поле реакции якоря ослабляет поле полюсов под набегающим краем полюса и усиливает его под убегающим краем, при этом поле якоря Фаq, по отношению к оси полюсов является поперечным. Если магнитная система генератора не насыщена, то, когда полюсы расположены непосредственно под проводниками якоря, результирующий поток (Фрез) почти не изменяется по значению, а лишь несколько «перекашивается». В случае насыщенной магнитной системы машины усиление поля под сбегающим краем полюса несколько меньше, чем его ослабление под набегающим краем, в результате чего суммарное поле несколько уменьшится. Для учета влияния поперечного поля реакции якоря Фаqсчитают, что оно индуцирует в обмотке якоря э. д. с. Еaq(рис. 13.5,б).
studlib.info
Исходные данные передаваемая мощность N = 9,9 кВт частота вращения вала двигателя П = дв=146) мин- частота вращения вала II Пи=1000 мин-, передача осуществляется от асинхронного двигателя с короткозамкнутым ротором, пусковая нагрузка составляет не более 120 % от нормальной, работа двухсменная. Передаточное число передачи U = Up — ri lnQ= И60/1000= 1,46. [c.288]
Во многих случаях линейная аппроксимация зависимости Mv((,i) невозможна. Так, например, в случае разгона токарного станка асинхронным двигателем зависимость Mv(o)) имеет вид, представленный на рис. 4.15. В этом случае уравнение (4.37) можно решить графически или применить численное интегрирование на ЭВМ (см. 3.4). [c.160]Первые результаты позволили увеличить производительность расчетов. Например, время поверочного расчета асинхронного двигателя сократилось от нескольких дней до нескольких минут. Это позволило резко увеличить количество анализируемых вариантов проекта. Однако возникло противоречие между возможностью расчета большого числа вариантов на ЭВМ и ограниченной возможностью ручного анализа вариантов проектировщиком. Необходимо было автоматизировать не только расчеты, но и процессы анализа вариантов и принятия решений. [c.12]
При построении поисковых алгоритмов оптимизации следует учесть, что многообразие методов оптимального проектирования ЭМП требует их сравнительной оценки и выбора из них наиболее эффективных для решения конкретных задач. Однако достаточно полные критерии теоретической оценки методов пока не разработаны и поэтому оценка осуществляется обычно с помощью вычислительного эксперимента. Анализ работ по оптимальному проектированию ЭМП показывает, что все основные методы программирования получили практическую апробацию. Так, методы упорядоченного перебора использованы для проектирования асинхронных двигателей [42], методы случайного перебора — для проектирования асинхронных двигателей и синхронных генераторов [24], методы градиента, покоординатного поиска, динамического программирования— для проектирования синхронных машин [8], методы случайного направленного поиска —для проектирования асинхронных машин (22] и т. д. [c.144]
Современное состояние автоматизации проектирования ЭМП характеризуется следующим. Разработаны научно-методические основы, созданы и внедрены САПР для выполнения проектных расчетов и конструирования различных классов ЭМП асинхронных двигателей, синхронных генераторов, крупных электрических машин, трансформаторов, коммутационной электроаппаратуры и др. Однако действующие САПР ЭМП существенно отличаются друг от друга даже в тех случаях, когда они предназначены для проектирования одного и того же класса ЭМП. [c.263]
Пример 1. Однофазный асинхронный двигатель [1]. Движение ротора асинхронного двигателя, статор которого питается однофазным переменным током, описывается уравнением [c.25]
На рис. 13 приведены механические характеристики п = f (М) двигателей различных типов. Для синхронного двигателя характеристика абсолютно жесткая. Штриховой линией показана полная характеристика асинхронного двигателя. [c.125]
Нерегулируемый с редкими и не очень частыми пусками небольшой и средней мощности Асинхронные двигатели с к. 3. ротором и нормальным скольжением Центробежные насосы и вентиляторы, двигатель-генераторы, транспортеры и конвейеры, нерегулируемые приводы металлорежущих станков [c.125]
Принимая зависимость для момента движущей силы но этому условию, запишем уравнение движения механиз.ма с асинхронным двигателем в виде зависимости (22.9) [c.288]
Если машинный агрегат не обладает свойством саморегулирования, то его движение становится неустойчивым. Нарушение равенства приведенных моментов движущих сил и моментов сил сопротивления вызовет либо остановку машины, либо увеличение скорости движения до недопустимого, с точки зрения нормальной эксплуатации, уровня. Неустойчивость движения характерна для машинных агрегатов с приводом от двигателей внутреннего сгорания, с асинхронным двигателем в период его пуска и т. п. Так как условия на- [c.349]
ЕС ЭВМ - единая система ЭВМ АД - асинхронный двигатель [c.3]
Следующей особенностью ЭМУ, в значительной мере определяющей круг задач их проектирования, является то, что они в большинстве случаев производятся в крупносерийных или массовых масштабах. Так, в нашей стране ежегодно производится несколько миллионов асинхронных двигателей общепромышленного применения, а годовой выпуск электрических машин для бытовой техники — десятки миллионов экземпляров. Производство и применение разнообразных ЭМУ требует весьма значительных затрат материалов и электроэнергии. К примеру, асинхронные двигатели мощностью до 100 кВт потребляют около 40% всей вырабатываемой в стране электроэнергии. Поэтому в проектировании ЭМУ следует принимать проектные решения, оптимальные по ряду таких важных показателей, как масса используемых активных материалов, расход электроэнергии, затраты на производство и эксплуатацию и пр. [c.17]
Схема алгоритма расчета рабочих характеристик асинхронного двигателя представлена на рис. 3.5, на котором обозначено /1 — номи- [c.57]
В частности, применение последнего подхода характерно для практики проектирования ЭМУ. Например, он используется при оптимизации асинхронных двигателей общепромышленного применения, когда в качестве результирующей функции цели рассматривается суммарная стоимость производства и эксплуатации изделий. [c.210]
САПР, созданная и развиваемая во ВНИИЭМ, предназначается для проектирования асинхронных двигателей общепромышленного применения. САПР АД включает следующие основные подсистемы [c.284]
Основным назначением гидропривода, как упоминалось выше, является преобразование приведенной к выходному звену механической характеристики приводящего двигателя в соответствии с требованиями нагрузочной характеристики рабочей машины или механизма. При этом широкие возможности объемного гидропривода позволяют использовать в качестве привода почти любой машины или механизма наиболее простой и дешевый нерегулируемый трехфазный асинхронный двигатель с короткозамкнутым ротором. [c.217]
Рассмотрим совместную работу приводящего асинхронного двигателя с объемным гидроприводом. Пусть вал электродвигателя соединен непосредственно с валом насоса, т. е. моменты на валах и частоты их вращения одинаковы М-, = /И , Пз == Пн, Для упрощения задачи пусть и вал гидромотора также непосредственно соединен с валом машины или механизма, т. е. Мд = М , Пд = Нм- Требуется при заданной нагрузке на валу машины определить рабочий режим гидромотора и электродвигателя. [c.217]
Рпс. 13.6. Определение рабочих режимов гидромотора и асинхронного двигателя [c.218]
При работе гидромуфты с асинхронным двигателем (рис. 14.10) первое требование сводится к тому, чтобы на линейном участке [c.242]
Рассмотрим совместную работу гидромуфты с асинхронным двигателем. [c.245]
| Рис. 14.12. Кривые для определения рабочих режимов гидромуфты и асинхронного двигателя | 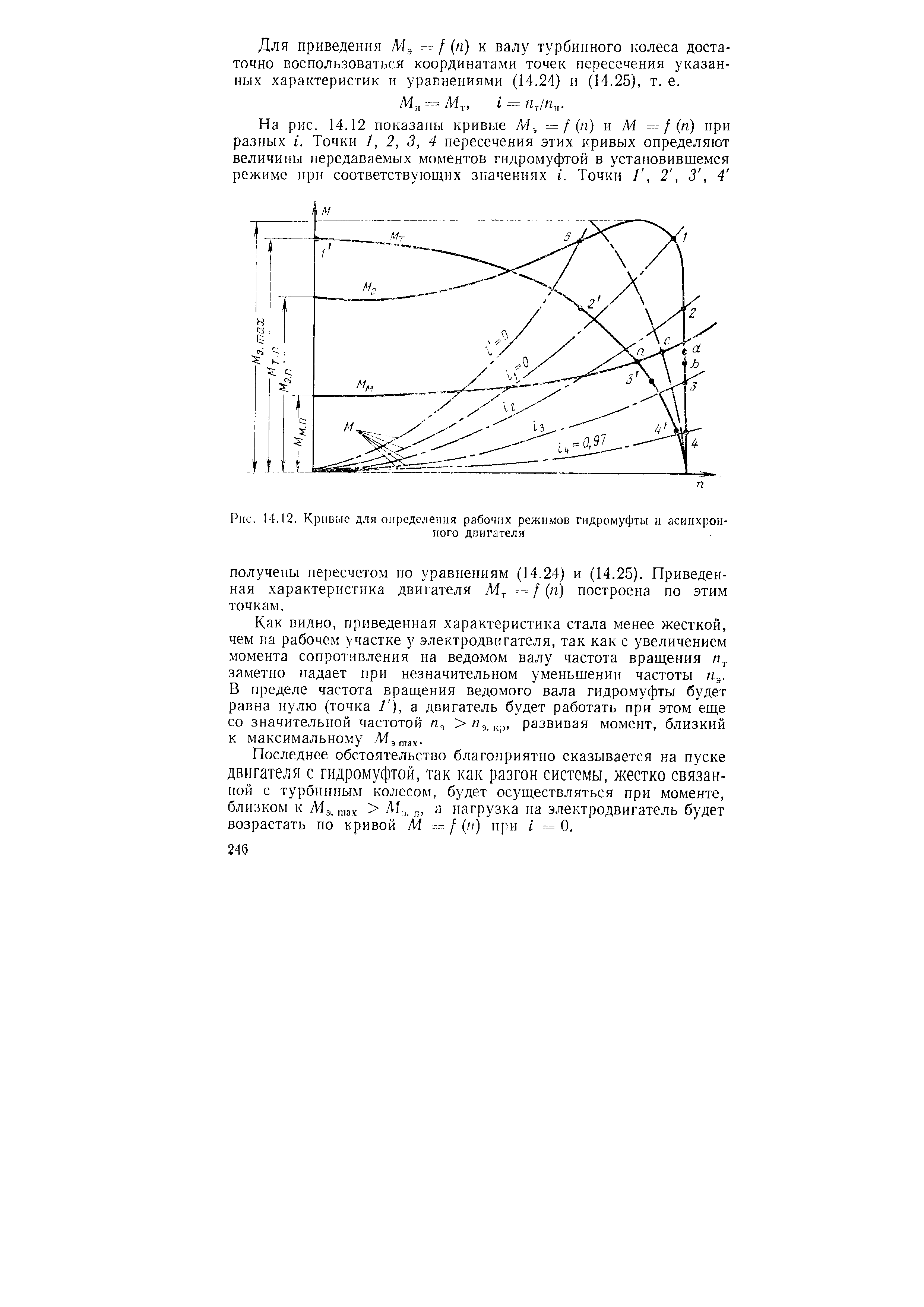 |
Схема плоского линейного индукционного насоса представлена на рис. XV.26. Насос состоит из двух плоских индукторов /, между которыми расположен канал 2, имеющий в сечении прямоугольную форму. Каждый из индукторов представляет собой развернутый в плоскости статор обычного асинхронного двигателя. [c.456]
Регулирование работы насоса изменением частоты вращения более экономично, чем регулирование дроссе-, лированием. Даже применение гидромуфт и сопротивления в цепи ротора асинхронного двигателя, связанные с дополнительными потерями мощности, экономичнее, чем регулирование дросселированием. [c.195]
Если пиковые нагрузки неизвестны, расчет можно вести на двукратную перегрузку так как для большшства асинхронных двигателей отношение максимального и номинального крутящих 1иомен- [c.58]
Более сложной является характеристика асинхронного двигателя трехс зазного тока (рис. 42, в), которая имеет зосхездящую и нисходящую части. Областью устойчивой работы двигателя при такой характеристике является ее нисходящая часть. Если момент сопротивления становится больше максимального момента движущих сил, называемого опрокидываюш,им моментом, то двигатель останавливается (опрокидывается). Аналогичную характеристику имеет двигатель внутреннего сгорания (имеется в виду зависимость среднего за цикл момента на коленчатом валу от угловой скорости этого вала). [c.57]
Подобно асинхронному двигателю ротор радиального подптпника образован кольцевым пакетом листового железа с высокими магнитными свойствами. Надежность обеспечивается резервированием обмоток и электронных схем. Число по 1К>сов от [c.399]
В области электромеханики проблема автоматизации проектирования стала актуальной сразу же, как только появились первые поколения ЭВМ. В нашей стране, так же как и за рубежом, первые работы по автоматизации проектирования ЭМП были начаты в 50-х годах. Под руководством Б. М. Кагана и Т. Г. Сорокера проектные расчеты асинхронных двигателей [c.6]
Следует также отметить, что на каждом уровне в отрасли имеется ряд однопрофильных организаций. Например, проектированием асинхронных двигателей общепромышленного назначения занимаются несколько отраслевых научно-исследовательских институтов и конструкторских бюро, между которыми работа распределена соответственно отрезкам единой серии. Несмотря на различия в конструкции и параметрах асинхронных двигателей различных отрезков серии, в процессе их разработки имеется много общего, особенно в функционально-методологическом плане. Таким образом, связи между организациями в многоуровне- [c.51]
Максимальный или критический момент Мщах асинхронного двигателя — наибольшая величина вращающего момента на валу, которую может развивать двигатель при подключении статора К сети с номинальными параметрами. Длительная работа при Л1шах [c.119]
I — синхронный двигатель 2 — двигатель постоянного тока параллельного или независимого иозбуждения и асинхронный двигатель в рабочем диапазоне [c.124]
Нерегулируемый с чаетыми пусками и приводы со значительными маховыми массами Асинхронные двигатели с к. 3. ротором, с повышенным скольжением и двигатели с фазным ротором Кузнечно-прессовые машины, ножницы, станки с большой частотой пусков и реверсов, например, винторезные автоматы [c.125]
Так как устойчивая работа агрегата и a opeгyлиpoвaниe его возможны только при нисходящей характеристике двигателя, то устойчивая работа механизма с асинхронным двигателем возможна только на правой ветви характеристики. Для болынинства двигателей данного типа с достаточной для практики точностью истинная характеристика заменяется на рабочем участке отрезком прямой линии, проходящей через точки С п О. Из уравнения этой прямой [c.288]
В качестве примера, поясняющего введенные понятия, рассмотрим управление процессом разгона асинхронного двигателя, которое можно осуществить, изменяя амплитуду и частоту питающего напряжения. Координатами состояния объекта являются частота вращения ротора, потребляемые токи, тепловое состояние элементов конструкции. На управляющие воздействия и координаты состояния накпадьшаются ограничения (например, амплитуда напряжения питания, потребляемые токи, температуры не должны превышать заданных пределов). Критерием оптимальности управления, выражаемым в общем случае функционалом вида (6.22), в рассматриваемом случае могут быть энергия, затрачиваемая на разгон двигателя [c.222]
Часто предварительное исследование практических задач проектирования ЭМУ позволяет упростить поиск оптимального управления и свести его к статической оптимизации. Рассмотрим такую возможность на примере задачи определения оптимального управления асинхронным двигателем (J =780 г M ,d =4,4 см, с =60000об/мин) в процессе разгона. Целью управления является минимизация времени разгона до номинальной частоты вращения П ом- При этом в качестве параметров управления используются значение и частота напряжения питания. Координатами состояния объекта являются частота вращения ротора I2 и ток статора /). При этом накладываются ограничения на значение напряжения ([/ [c.225]
Для примера в табл. 6.12 представлен фрагмент матрицы коэффициентов влияния таких параметров, как диаметр (1 и длина пакета статора, длина полувитка обмотки статора /ц,,, диаметр провода (1 р, диаметр Дз и длина пакета ротора, диаметр паза ротора с1 2, ширина Дк и высота короткозамкнутого кольца обмотки ротора, значение i/l и частота / питающего напряжения асинхронного двигателя ГМА4П, на основные рабочие показатели этого двигателя. Коэффициенты влияния могут также служить для обоснованного вьще-ления группы параметров, по которым будет проводиться поиск значений допусков. Для параметров, изменение которых оказывает незначительное влияние на уровень показателей, (например, табл. 6.11), допуски должны назначаться по технико-экономическим соображениям. [c.247]
Современные гироскопические приборы и системы представляют собой сложные электромеханические устройства, в конструкциях которых используются высокооборотные синхронные и асинхронные двигатели, безмомент-ные индуктивные чувствительные элементы, электронные, транзисторные и магнитные преобразователи и усилители, прецизионные сельсинные и потенциометрические дистанционные передачи, редукторные и безредукторные сервоприводы, электромагнитные моментные датчики, прецизионные специальные шариковые подшипники и другие виды прецизионных подвесов (поплавковые, воздушные, электростатические, электромагнитные и др.) и т. д Приборы и системы, действие которых основано использовании свойств гироскопа, называются гироскопическими. [c.6]
Следуюн(ий метод регулирования основан на использовании индукционного регулятора (рис. 5-8, г). Простейшим индукционным регулятором может служить заторможенЕ1ый асинхронный двигатель с фазным ротором, устроенный таким образом, чтобы ротор можно было плавно поворачивать на 180°. К тре хфазной сети присоединяются три фазные обмотки либо ротора, либо статора, создающие вращающееся магнитное поле. Если к сети присоединен ротор, то в каждой фазной обмотке статора благодаря вращающемуся магнитному полю индуктируется переменное напряжение. При повороте ротора амплитуда этого напряжения остается одной и той же, а фаза будет изменяться. Первичная обмотка испытательного трансформатора присоединяется к сети последовательно с одной из указанных выше фазных обмоток. Вследствие этого к трансформатору прикладывается геометрическая сумма напряжения сети П] и напряжения фазной обмотки В зависимости от положения ротора сдвиг фаз между напряжениями П, и Пз имеет различное значение. Таким образом, напряжение на первичной обмотке трансформатора Пт при повороте ротора будет плавно и.зменяться от минимума (О1 — С/. ) до максимума (и214 >) Индукционные регуляторы обеспечивают плавное регулирование напряжения, по вызывают искажение кривой напряжения. [c.106]
mash-xxl.info