Схема управления нереверсивным электроприводом с асинхронным двигателем с короткозамкнутым ротором без использования электрического торможения приведена на рис.13.1. В схеме реализуется пуск электродвигателя прямым подключением обмотки статора к питающей сети и работа в продолжительном режиме. Схема содержит следующие аппараты:
QF – автоматический выключатель (в дальнейшем автомат) с максимально-токовым расцепителем;
КМ – контактор или пускатель;
FR1 и FR2 - тепловые реле;
FU1 и FU2 – предохранители;
SB-П («Пуск») и SB-С («Стоп») - кнопки пуска и остановки электропривода.
 В исходном поло-жении схемы вклю-чён автомат QF. Пуск электропривода осу-ществляется нажатием кнопки SB-П. При этом подаётся питание на катушку КМ. Кон-тактор включается и замыкает свои сило-вые контакты, подключая статорную об-мотку к питающей се-ти. После пуска д
В исходном поло-жении схемы вклю-чён автомат QF. Пуск электропривода осу-ществляется нажатием кнопки SB-П. При этом подаётся питание на катушку КМ. Кон-тактор включается и замыкает свои сило-вые контакты, подключая статорную об-мотку к питающей се-ти. После пуска д
Рис.13.1. Схема управления нереверсивным электроприводом с асинхронным к.з.двигателем
вига-тель работает на естественной характеристике. Срабатывая ко-нтактор КМ замыкает свой вспомогательный контакт, включённый параллельно кнопкеSB-П, и становится на самопитание.Чтобы остановить электропривод, нажимают кнопку SB-С («Стоп»), катушка КМ теряет питание и контактор отключает статорную цепь от питающей сети. Схема возвращается в исходное состояние.
Электропривод останавливается под действием статического момента электропривода Мс, который определяется технологией работы механизма.
В схеме имеются следующие защиты. Нулевая защита, которая реализуется контактором КМ, так как управление схемой осуществляется от кнопок. При кратковременном исчезновении питающего напряжения или значительном его снижении контактор КМ отключается, и схема возвращается в исходное состояние.
Максимально-токовая защита в силовых цепях выполняется автоматом QF за счёт использования в нём максимально-токового расцепителя с уставкой срабатывания 1114Iн. При возникновении короткого замыкания в силовой цепи, срабатывает максимально-токовый расцепитель и автомат отключает статорную цепь и электропривод в целом.
Максимально-токовая защита в цепях управления осуществляется предохранителями FU1 и FU2, номинальный ток которых Iн.пр=1,21,3Iмакс.нагр.
Тепловая защита двигателя выполняется тепловыми реле FR1, FR2, размыкающие контакты которых включены в цепь катушки контактора КМ. При срабатывании одного из тепловых реле контактор КМ отключается, и схема возвращается в исходное состояние. Повторно она может быть включена после остывания теплового реле и двигателя.
Некоторые технологии требуют, чтобы процесс остановки электропривода протекал интенсивнее, чем только под действием статического момента. В этом случае в схемах управления используют различные виды электрического торможения - динамическое торможение и торможение противовключением, а также механическое торможение с помощью электромагнитных тормозов.
На рис.13.2 приведена принципиальная схема нереверсивного электропривода, которая позволяет производить пуск и остановку электродвигателя с динамическим торможением.

Рис.13.2. Схема нереверсивного асинхронного электропривода с динамическим торможением
Питание на схему подаётся автоматическим выключателем QF, напряжение переменного тока на обмотку статора – линейным контактором КМ1, напряжение постоянного тока – контактором динамического торможения КМ2. Источник постоянного тока содержит трансформатор Т и выпрямитель V1, подключаемые к сети контактором КМ2 только в режиме торможения.
Команда на пуск подаётся кнопкой SB2-П, а команда на остановку подаётся кнопкой SBC. При ее нажатии включается контактор КМ1, и двигатель подключается к сети. Для остановки двигателя нажимают кнопку SB1-C, контактор КМ1 отключается и отключает двигатель от сети переменного тока. Одновременно нормально закрытым (н.з.) блок-контактом КМ1 включается контактор КМ2, подающий в обмотки статора двигателя постоянный ток. Двигатель переходит в режим динамического торможения. Длительность подачи постоянного тока в обмотки статора контролируется реле времени КТ. После отключения катушки КТ его контакт в цепи катушки КТ2 с выдержкой времени размыкается.
В схеме применены нулевая, максимально-токовая и тепловая защиты, осуществляемая соответственно линейным контактором КМ1, автоматическим выключателем QF с максимально-токовым расцепителем и токовыми реле FR1 и FR2. Схема управления защищена предохранителями FU1 и FU2. При срабатывании любой из защит отключается линейный контактор КМ1. Используемая в схеме блокировка контактами 3-4 и 1-8 запрещает одновременное срабатывание контакторов КМ1 и КМ2.
Когда по условиям технологического процесса необходимо значительно ускорить процесс торможения, то применяют торможение противовключением. Схема реверсивного асинхронного электропривода, в которой реализуется торможение противовключением приведена на рис.13.3. Исходя из условий эксплуатации электропривода схема управления питается пониженным стандартным напряжением от трансформатора ТС.
Схема позволяет осуществлять прямой пуск, реверс и остановку электропривода торможением противовключением с контролем по скорости. При этом в качестве чувствительного элемента используется электромеханическое реле контроля скорости SR, устанавливаемое на валу электродвигателя. Оно замыкает свои контакты SR(B) или SR(Н) при скорости SR0,01н.дв.
Управляющие команды подаются в схему кнопками управления SB2 («Вперёд»), SB3(«Назад») и SB1 («Стоп») в зависимости от требуемого по технологии направления вращения. Напряжение на обмотку статора подаётся контакторами КМ1(В), чередование фаз АВС, и КМ2(Н), чередование фаз СВА. Кнопка остановки электропривода SB1(C) включена в цепь катушки реле торможения КТ, которое организует режим торможения противовключения при любом направлении вращения. В цепях катушек контакторов КМ1(В) и КМ2(Н) находятся блокировочные контакты 5-6 (SB3), 6-7(KM2) и 12-13(SB2) 13-14(КМ1), предотвращающие одновременное срабатывание этих контакторов.

Рис.13.3. Схема реверсивного асинхронного электропривода с торможением противовключением
Управление электроприводом осуществляется следующим образом. При нажатии кнопки SB2-B образуется цепь питания катушки КМ1, контактор КМ1 срабатывает и подключает статорную обмотку асинхронного электродвигателя к питающей сети и происходит прямой пуск по характеристике, показанной на рис.4.19.
При срабатывании контактора КМ1-В замыкается контакт 4-5 (КМ1-В), шунтирующий кнопку SB2-В, и контактор становится на самопитание. Одновременно в цепи катушки КМ2-Н размыкается блокировочный контакт 13-14 (КМ-В), в цепи катушки реле торможения КТ замыкается контакт 3-15(КМ1-В). При разгоне электродвигателя срабатывает реле контроля скорости и замыкает свой контакт 11-13(SR-H), подготавливая схему к остановке электропривода, если будет нажата кнопка SB1-С("Стоп").
Для реверсирования электропривода нужно нажать кнопку SB3-Н. После этого размыкается блокирующий контакт 5-6(SB3) в цепи катушки КМ1. Контактор КМ1 отключает статор двигателя от питающей сети. Одновременно в цепи катушки КМ2 замыкается блокирующий контакт 13-14(КМ1). Катушка КМ2 получает питание, и контактор КМ2 подключает статорную обмотку к питающей сети, изменив чередование фаз. Магнитное поле электродвигателя начинает вращаться в противоположном направлении, а ротор по инерции вращается в прежнем направлении. Поэтому асинхронный двигатель переходит в режим торможения противовключением до полной остановки, а затем разгоняется в направлении «Назад». Этот процесс показан на рис.4.19. При разгоне «Назад» реле контроля скорости замыкает свой контакт 11-6(SR-B), подготавливая схему к остановке. В цепи катушки реле торможения КТ контактор замыкает 3-15(КМ2). При нажатии кнопки SB1-C катушка реле торможения КТ получает питание и реле КТ срабатывает, размыкая контакт 3-4(КТ) и замыкая контакт 3-11(КТ). Контактор КМ2 теряет питание и отключает статорную обмотку от питающей сети. При этом контактор КМ2 замыкает свой блокировочный контакт 6-7(КМ2) в цепи катушки КМ1. Контактор КМ1 срабатывает, так как катушка КМ1-В получает питание по цепи 3-1(КТ), 11-6(SR-H), 6-7(КМ2). Статорная обмотка подключается прямым чередованием фаз, «Вперёд», а ротор вращается по инерции в направлении «Назад». Поэтому асинхронный двигатель переходит в режим торможения противовключением. Тормозной момент электропривода в режиме торможения Мт=-(Мс-Мпв). Когда скорость снизится практически до нуля, реле контроля скорости SR разомкнёт свой контакт 3-11 (КТ) и катушка КМ1 потеряет питание, а контактор КМ1 отключит статорную обмотку от питающей сети.
В технологических установках применяются электроприводы с двухскоростными асинхронными электродвигателями, у которых ступенчатое регулирование скорости достигается за счёт изменения числа пар полюсов путём изменения схемы включения специально выполненной статорной обмотки (см.§4.4).
На рис.13.4 приведена схема нереверсивного электропривода с двухскоростным асинхронным двигателем. В схеме предусмотрено переключение статорной обмотки с треугольника на двойную звезду (/). Такая схема применяется в электроприводах механизмов, если по технологии требуется регулирование скорости с постоянной мощностью на рабочем органе. Механические характеристики электропривода по схеме рис.13.4 приведены на рис.4.21.
Управляющие команды в схему подаются трёхпозиционным командоконтроллером SM. В исходном положении, когда включены автоматы QF1 и QF2 и командоконтроллер находится в нулевом (левом) положении, срабатывает реле напряжения KV и своим контактом KV становится на самопитание.

Рис.13.4. Схема включения двухскоростного асинхронного двигателя
При переключении командоконтроллера в первое положение (НС) получает питание катушка контактора КМ1(НС), контактор срабатывает, замыкает свой контакт 3-6 в цепи катушки тормозного контактора КМТ и подключает статорную обмотку, включённую в треугольник (), к сети. В тоже время тормозной контактор КМТ срабатывает и подаёт питание на электромагнит тормоза, тормоз растормаживается (поднимаются колодки), и электродвигатель пускается на низкую скорость (число пар полюсов 2р).
При переключении командоконтроллера во второе положение (ВС) катушка контактора КМ1(НС) отключает статорную обмотку от сети. Катушки контакторов КМ2(ВС) и КМ3(ВС) получают питание и контакторы срабатывают. Контактор КМ3(ВС), замыкая свои контакты, образует нулевую точку двойной звезды. Контактор КМ2(ВС) замыкает свой контакт 3-6 в цепи катушки тормозного контактора КМТ, контактор КМТ срабатывает или остаётся включённым. Одновременно контактор КМ2(ВС) подключает вершину двойной звезды статорной обмотки и двигатель пускается на высокую скорость (число пар полюсов р), как показано рис.4.21. Чтобы остановить электропривод необходимо переключить командоконтроллер в нулевое положение. В этом случае контакторы теряют питание, статорная обмотка отключается от сети и контакты КМТ оказываются разомкнутыми. Контактор КМТ снимает питание с катушки электромагнитного тормоза, и тормозные колодки накладываются на тормозной барабан. Электропривод останавливается под действием момента сопротивления Мс и момента Ммт механического тормоза.
studfiles.net
На рис. 2.8 приведены электрические схемы узла управления пуском в функции времени двигателей с фазным ротором. Узел на рис. 2.8, а предполагает использование аппаратуры переменного тока, например, реле времени РУ1 и РУ2 с часовым механизмом или маятниковых, пристраиваемых соответственно к контакторам КЛ и КУ1, или со своим электромагнитом. Реле имеют выдержку времени при срабатывании. Реле РУ1 начинает отсчет выдержки времени после включения контактора КЛ, реле РУ2 — после включения контактора КУ1.
Таким образом, после нажатия на кнопку КнП и включения контактора КЛ реле РУ1 и затем РУ2 с определенными выдержками времени замыкают свои контакты и включают контакторы ускорения КУ1 и КУ2. Последние закорачивают сопротивления Rдоб.1 и Rдоб.2 пусковых ступеней. Ход процесса пуска здесь в принципе тот же, что и для двигателя постоянного тока.
При большой частоте включений двигателя используют контакторы переменного тока с катушками постоянного тока и электромагнитные реле времени постоянного тока. В этом случае цепи управления выполняют по схеме, аналогичной схеме изображенной на рис. 2.2.
Для особо напряженных режимов работы коммутация статорных цепей осуществляется при помощи контакторов постоянного тока в двухполюсном исполнении. Катушки контакторов КЛ1 и КЛ2 при этом соединяются параллельно.
Применение двух двухполюсных контакторов вместо трех однополюсных исключает режим работы двигателя на двух фазах при обрыве в цепи катушки одного из контакторов.
На рис. 2.9 изображена схема узла, обеспечивающего динамическое торможение асинхронных двигателей с управлением в функции времени. Узел применяют при отсутствии сети постоянного тока, поэтому обмотки статора двигателя питаются через выпрямитель Вм с трансформатором Тр. В схеме используют аппараты переменного тока. Особенностью схемы является использование реле времени РДТ — маятникового типа, которое пристроено к контактору динамического торможения КДТ. У двигателя с фазным ротором при торможении в цепь ротора вводится добавочное сопротивление Rдоб обычно равное сопротивлению пускового реостата Rдобп (на рисунке этот реостат условно показан в виде одной ступени, управляемой контактором КУ и реле РУ , — штриховые линии).

Рис. 2.8. Схема управления пуском асинхронного двигателя
с фазным ротором в функции времени
При работе двигателя включены контакторы КЛ и КУ. Нажатие на кнопку КнС вызывает отключение этих контакторов и введение и цепь ротора сопротивления Rдобп. Вместе с тем замыкающий контакт кнопки КнС создает цепь включения контактора КДТ. Последний срабатывает, главными контактами присоединяет две фазы статора питателя к выпрямителю Вм. Двигатель переходит в режим динамического торможения. Реле времени РДТ, отсчитав выдержку времени, установленную для процесса торможения, своим контактом отключает контактор КДТ. Торможение заканчивается.
При наличии сети постоянного тока обмотки статора питаются непосредственно от этой сети через добавочное сопротивление и два замыкающих главных контакта контактора КДТ. При большой частоте включений применяют аппаратуру постоянного тока. В этом случае схема цепей управления ничем не отличается от схемы на рис. 2.5.

Рис. 2.9. Схема управления динамическим торможением асинхронного двигателя
с фазным ротором в функции времени
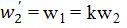
На рис. 2.10 приведены схемы узлов, используемых при торможении противовключением асинхронных короткозамкнутых двигателей, в которых управление торможением осуществляется в функции скорости двигателя с ее прямым контролем при помощи реле РКС (например с помощью индукционного реле контроля скорости).
Схема на рис. 2.10, а обеспечивает управление процессом торможения нереверсивного двигателя при его остановке. Во время работы двигателя включен контактор КЛ. После нажатия на кнопку КнС выключается контактор КЛ и включается контактор КТ, поскольку реле РKC замкнуло свой контакт в цепи катушки КТ еще при пуске. Происходит торможение двигателя в режиме противовключения. При скорости, близкой к нулю, контакт реле РКС размыкается и отключает контактор КТ. Двигатель останавливается. Вариант схемы управления приведенный на рис. 2.10, б применяют для остановки реверсивного электропривода. При работе двигателя переключающий контакт реле РКС в зависимости от направления вращения находится либо в положении 1-3 (при вращении «вперед»), либо в положении 1- 2 (при вращении «назад»). Введение в действие реле РКС только при подаче команды на остановку двигателя, т.е. при нажатии на кнопку КнС, обеспечивается блокировочным реле РБ. Допустим, что двигатель работал в направлении «вперед», т.е. был включен контактор КВ. Тогда нажатие на кнопку КнС приводит к включению реле РБ. Размыкающий контакт РБ отключает контактор KB, а замыкающий контакт РБ включает контактор КН по цепи через замкнутый контакт 1 - 3 реле РКС и замкнувшийся блок-контакт КВ. После этого кнопка КнС может быть отпущена, так как реле РБ становится на самопитание. Происходит торможение двигателя противовключением до тех пор, пока при ω ≈ 0 не разомкнется контакт 1 - 3 реле РКС. При вращении двигателя в направлении «назад» и нажатии на кнопку КнС схема действует аналогично.
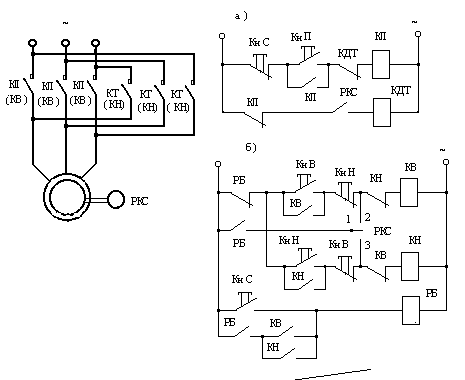
Рис. 2.10. Схема управления торможением противовключением
асинхронного двигателя в функции скорости
Если нужно реверсировать двигатель без его остановки, то кнопку КнС не нажимают. Достаточно кратковременно нажать на кнопку противоположного направления вращения. Например, если двигатель был включен в направлении «вперед», то после нажатия на кнопку КнН ее размыкающим контактом отключается контактор KB, а затем включается контактор КН, и кнопка может быть отпущена. Двигатель затормаживается в режиме противовключения и далее разгоняется в направлении «назад», поскольку катушка контактора КН продолжает получать питание через размыкающий контакт реле РБ до тех пор, пока не будет нажата кнопка КнС.
При помощи реле контроля скорости можно также управлять динамическим торможением асинхронных двигателей с короткозамкнутым и фазным ротором. Схема соответствующего узла аналогична схеме, приведенной на рис. 2.9, где вместо контакта реле РДТ в цепи управления нужно включить размыкающий контакт реле РКС.
На рис. 2.11 показана схема узла, реализующего управление торможением противовключением двигателя с фазным ротором, при этом в схеме используют косвенный метод контроля скорости двигателя посредством реле напряжения РП постоянного тока, катушка которого подключена через выпрямитель Вм на зажимы обмотки ротора. Напряжение на катушке РП пропорционально скольжению s двигателя: Е2= E2к s, где E2к — линейная ЭДС ротора при s = 1. Реле настраивается с помощью регулировочного реостата Rрег так, чтобы оно срабатывало в самом начале процесса торможения (т.е. при скольжении s = 2) и отпускало свой якорь при скорости, близкой к нулю (т.е. при s ≈ 1). При пуске реле РП не включается. На схеме цепи управления пуском представлены одной ступенью сопротивления Rдоб.п контактором КУ и реле времени РУ, пристроенным к контактору КП, который срабатывает в начале пуска и закорачивает ступень противовключения Rдоб. пр.

Рис. 2.11. Схема управления торможением противовключением
асинхронного двигателя в функции скорости при косвенном контроле
Алгоритм работы анализируемого узла сводится к следующему. Предположим, что двигатель работал в направлении «вперед». После нажатия на кнопку КнН отключаются контакторы KB и КП. Затем включается контактор КН, переводя двигатель в режим противовключения. При этом срабатывает реле РП и размыкает свой контакт в цепи катушки контактора КП, не позволяя ему включиться и обеспечивая тем самым введение в цепь ротора сопротивлений Rдоб.п и Rдоб. пр. Для повышения надежности такой операции применено блокировочное реле РБ. Оно создает временный разрыв в цепи катушки контактора КП, т.е. отключается при отключении контактора KB и включается только после замыкания контактов контактора КН. Когда контакт РБ закроется, реле РП уже успеет сработать и разомкнуть свой контакт. В конце торможения контакт РП закрывается, включается контактор КП. Далее происходит разгон двигателя в направлении «назад». Аналогично работает схема и при обратном реверсе. При нажатии на кнопку КнС двигатель отключается от сети и тормозится только под действием статического момента.
Релейно-контакторные схемы широко используются и для управления многоскоростными двигателями. Особенностью таких схем является то, что подключение обмоток двигателя к источнику питания производится только после выбора скорости вращения двигателя, т.е. после осуществления соединения обмоток двигателя по требуемой схеме (звезда, двойная звезда, треугольник).
В тех случаях, когда прямой пуск короткозамкнутых асинхронных двигателей невозможен либо ввиду недостаточной мощности питающей сети, либо в связи с необходимостью обеспечения пониженных значений момента двигателя по условиям ограничения ускорения рабочих органов производственной машины, прибегают к пуску при пониженном напряжении. С этой целью в обмотки статора включают пусковые резисторы. Наиболее распространенная схема ограничения пускового тока и момента низковольтного двигателя приведена на рис. 2.12. При включении контактора К У обмотки статора присоединяются к сети через пусковые резисторы Rдо6 . Разгон двигателя происходит по искусственной характеристике 1 с начальным пусковым моментом Мпи. В конце разгона при скорости < ωc автоматически включается контактор КЛ, закорачивающий резисторы Rдо6.

Рис. 2.12. Узел схемы управления пуском асинхронного короткозамкнутого двигателя
Двигатель выходит на естественную характеристику 2 и разгоняется по ней до установившейся скорости ωс . Управляют моментом включения контактора КЛ обычно в функции времени.
Для небольших двигателей в целях ограничения пускового момента используют иногда однофазное включение резистора Rдо6 . Для высоковольтных двигателей большой мощности в схеме на рис. 2.12, вместо резисторов включаются реакторы Хдоб , а вместо контакторов КУ и КЛ — выключатели ВУ и ВЛ.
Если требуется обеспечить наибольший пусковой момент двигателя при заданном ограничении пускового тока, применяют пуск через автотрансформатор. В этом случае при пуске двигателя сначала статор двигателя включается на часть обмотки автотрансформатора, а затем по истечению выдержки времени на статор двигателя подается полное напряжение сети (пусковые характеристики аналогичны характеристикам 1, 2 рис. 2.12).
studfiles.net
Принципиальная электрическая схема управления асинхронным двигателем с помощью нереверсивного магнитного пускателя приведена на рисунке 4. Защита от самопроизвольного включения при восстановлении исчезнувшего напряжения осуществляется с помощью замыкающих блок-контактов, включенных параллельно кнопке SB2 (пуск). Защиту асинхронного двигателя от перегрузок недопустимой продолжительности выполняет тепловое реле KK, размыкающий контакт которого включен последовательно в цепь управления пускателем. Защита цепи от коротких замыканий здесь осуществляется предохранителями FU1; FU2; FU3. Для снятия напряжения при замене перегоревших плавких вставок установлен рубильник Q.
 Рисунок 4 – Схема управления асинхронным короткозамкнутым электродвигателем с помощью магнитного пускателя и кнопочной станции На рисунке 5 показана принципиальная электрическая схема управления асинхронным двигателем с двух мест с помощью двух кнопочных станций. Такая необходимость может возникнуть при управлении конвейером в длинных помещениях и в других случаях. Управлять асинхронным двигателем можно и с большего числа мест
Рисунок 4 – Схема управления асинхронным короткозамкнутым электродвигателем с помощью магнитного пускателя и кнопочной станции На рисунке 5 показана принципиальная электрическая схема управления асинхронным двигателем с двух мест с помощью двух кнопочных станций. Такая необходимость может возникнуть при управлении конвейером в длинных помещениях и в других случаях. Управлять асинхронным двигателем можно и с большего числа мест 
Рисунок 5 – Схема управления электродвигателем с двух мест при наличии соответствующего количества кнопочных станций 
Рисунок 6 – Схема управления асинхронным двигателем с помощью реверсивного магнитного пускателя: а — силовая цепь; б — цепь управления с электрической блокировкой контактами магнитного пускателя и контактами кнопочной станции; в — цепь управления с электрической блокировкой контактами магнитного пускателя Реверсивные магнитные пускатели комплектуются из двух нереверсивных. Они снабжаются механической блокировкой, исключающей одновременное включение двух контакторов, в результате которого могло бы произойти короткое замыкание. Электрические блокировки для предотвращения одновременного включения двух контакторов осуществляются с помощью размыкающих контактов КM1 и КM2 (рисунок 6, б). Аналогичные электрические блокировки осуществляются также размыкающими контактами трех кнопочных станций (рисунок 6, в). Пусковые элементы этих станций («вперед» и «назад») имеют по два механически связанных замыкающих и размыкающих контакта. При нажатии на кнопку первым отключается размыкающий контакт, а затем включается замыкающий.
diplomka.net
На рис. 2.8 приведены электрические схемы узла управления пуском в функции времени двигателей с фазным ротором. Узел на рис. 2.8, а предполагает использование аппаратуры переменного тока, например, реле времени РУ1 и РУ2 с часовым механизмом или маятниковых, пристраиваемых соответственно к контакторам КЛ и КУ1, или со своим электромагнитом. Реле имеют выдержку времени при срабатывании. Реле РУ1 начинает отсчет выдержки времени после включения контактора КЛ, реле РУ2 — после включения контактора КУ1.
Таким образом, после нажатия на кнопку КнП и включения контактора КЛ реле РУ1 и затем РУ2 с определенными выдержками времени замыкают свои контакты и включают контакторы ускорения КУ1 и КУ2. Последние закорачивают сопротивления Rдоб.1 и Rдоб.2 пусковых ступеней. Ход процесса пуска здесь в принципе тот же, что и для двигателя постоянного тока.
При большой частоте включений двигателя используют контакторы переменного тока с катушками постоянного тока и электромагнитные реле времени постоянного тока. В этом случае цепи управления выполняют по схеме, аналогичной схеме изображенной на рис. 2.2.
Для особо напряженных режимов работы коммутация статорных цепей осуществляется при помощи контакторов постоянного тока в двухполюсном исполнении. Катушки контакторов КЛ1 и КЛ2 при этом соединяются параллельно.
Применение двух двухполюсных контакторов вместо трех однополюсных исключает режим работы двигателя на двух фазах при обрыве в цепи катушки одного из контакторов.
На рис. 2.9 изображена схема узла, обеспечивающего динамическое торможение асинхронных двигателей с управлением в функции времени. Узел применяют при отсутствии сети постоянного тока, поэтому обмотки статора двигателя питаются через выпрямитель Вм с трансформатором Тр. В схеме используют аппараты переменного тока. Особенностью схемы является использование реле времени РДТ — маятникового типа, которое пристроено к контактору динамического торможения КДТ. У двигателя с фазным ротором при торможении в цепь ротора вводится добавочное сопротивление Rдоб обычно равное сопротивлению пускового реостата Rдобп (на рисунке этот реостат условно показан в виде одной ступени, управляемой контактором КУ и реле РУ , — штриховые линии).

Рис. 2.8. Схема управления пуском асинхронного двигателя
с фазным ротором в функции времени
При работе двигателя включены контакторы КЛ и КУ. Нажатие на кнопку КнС вызывает отключение этих контакторов и введение и цепь ротора сопротивления Rдобп. Вместе с тем замыкающий контакт кнопки КнС создает цепь включения контактора КДТ. Последний срабатывает, главными контактами присоединяет две фазы статора питателя к выпрямителю Вм. Двигатель переходит в режим динамического торможения. Реле времени РДТ, отсчитав выдержку времени, установленную для процесса торможения, своим контактом отключает контактор КДТ. Торможение заканчивается.
При наличии сети постоянного тока обмотки статора питаются непосредственно от этой сети через добавочное сопротивление и два замыкающих главных контакта контактора КДТ. При большой частоте включений применяют аппаратуру постоянного тока. В этом случае схема цепей управления ничем не отличается от схемы на рис. 2.5.

Рис. 2.9. Схема управления динамическим торможением асинхронного двигателя
с фазным ротором в функции времени
На рис. 2.10 приведены схемы узлов, используемых при торможении противовключением асинхронных короткозамкнутых двигателей, в которых управление тормо
жением осуществляется в функции скорости двигателя с ее прямым контролем при помощи реле РКС (например с помощью индукционного реле контроля скорости).
Схема на рис. 2.10, а обеспечивает управление процессом торможения нереверсивного двигателя при его остановке. Во время работы двигателя включен контактор КЛ. После нажатия на кнопку КнС выключается контактор КЛ и включается контактор К
electrono.ru
Принцип автоматического управления заключается в том, что без участия человека осуществляется строгое и последовательное выполнение операций по включению, отключению электрооборудования, а также соблюдение заданного режима его работы.
Различают два вида управления: полуавтоматическое и автоматическое. При полуавтоматическом управлении оператор осуществляет первоначальный пуск объекта (нажатие кнопки, поворот ручки и так далее). В дальнейшем его функции сводятся лишь к наблюдению за ходом процесса. При автоматическом управлении даже начальный импульс по включению установки посылают датчик или реле. Установка полностью работает в автоматическом режиме по заданной программе.
Программное устройство может быть выполнено как на основе электромеханических элементов, так и с помощью логических схем. Рассмотрим две часто встречающиеся на практике схемы управления асинхронными электродвигателями.
 При нажатии кнопки «пуск» подключается к сети катушка электромагнита. Подвижный якорь придет в соприкосновение с сердечником катушки и своим движением замкнет силовые контакты, подающие трехфазное напряжение на электродвигатель. Одновременно с силовыми, замкнутся и блокировочные контакты, которые зашунтируют кнопку «пуск», что позволяет ее отпустить. При нажатии кнопки «стоп» разрывается цепь питания катушки электромагнита и якорь, освободившись, отпадает, разомкнув при этом силовые контакты. Электродвигатель остановится.
При нажатии кнопки «пуск» подключается к сети катушка электромагнита. Подвижный якорь придет в соприкосновение с сердечником катушки и своим движением замкнет силовые контакты, подающие трехфазное напряжение на электродвигатель. Одновременно с силовыми, замкнутся и блокировочные контакты, которые зашунтируют кнопку «пуск», что позволяет ее отпустить. При нажатии кнопки «стоп» разрывается цепь питания катушки электромагнита и якорь, освободившись, отпадает, разомкнув при этом силовые контакты. Электродвигатель остановится.
Защита электродвигателя от длительной перегрузки здесь обеспечивается двумя тепловыми реле РТ, включенными в две фазы. Отключающие контакты тепловых реле РТ1 и РТ2 введены в цепь питания катушки электромагнита.
 Для реверсивного управления двигателем применяется схема с двумя магнитными пускателями. Один магнитный пускатель коммутирует схему включения двигателя на прямое вращение, а другой — на обратное. Кнопки «вперед» и «назад» подключают соответственно свои катушки, а кнопка «стоп» и отключающие контакты теплового реле включены в общую цепь управления.
Для реверсивного управления двигателем применяется схема с двумя магнитными пускателями. Один магнитный пускатель коммутирует схему включения двигателя на прямое вращение, а другой — на обратное. Кнопки «вперед» и «назад» подключают соответственно свои катушки, а кнопка «стоп» и отключающие контакты теплового реле включены в общую цепь управления.
www.mtomd.info