





Еще одним способом осуществления электрического торможения асинхронного электродвигателя является торможение противовключением. Этот способ применим только для машин с фазным ротором.
Торможение противовключением – это такой режим работы электродвигателя, при котором происходит вращения электродвигателя рабочим органом в сторону, противоположную направлению момента асинхронной машины (ротор вращается в направлении обратном вращению поля магнитного статора).
При останове ротора машины ток в нем будет достигать 5-6 кратных значений. В режиме противовключения, когда s>1, роторный ток будет еще больше, а момент машины, в следствии большого роторного тока и, как следствие увеличения его реактивной составляющей, будет мал. Для повышения момента в цепь ротора включают активное сопротивления большого значения. Таким образом, осуществляют торможение на прямолинейном участке характеристики, крутизну которого будет определять активное роторное сопротивление. Механическая характеристика работы в режиме противовключения асинхронного электродвигателя при спуске груза ниже:

Огромным недостатком таких характеристик есть их довольно большая крутизна, трудность получения малых скоростей при опускании груза, а также возможны довольно значительные колебания скорости при опускании груза даже при незначительном изменении его веса. Но, несмотря на эти недостатки в практике все еще довольно часто можно встретить торможение противовключением в электроприводах подъемно-транспортных механизмов.
В случае действия реактивного статического момента характеристика торможения противовключением будет выглядеть так:

Также необходимо учесть и то, что для устранения возможного самопроизвольного реверса рабочей машины при достижении малой скорости (близкой к нулю), электродвигатель необходимо отключить от сети.
Расчет механической характеристики могут производить по выражениям:

Или:

Но более практический интерес представляют определение сопротивления противовключения, которое можно вычислить по формуле:

В этом случае в осях М и s строится линейная часть естественной характеристики и требуемая механическая характеристика противовключения:
Значения скольжений естественной se и искусственной su, взятые из рисунка, дают возможность определить значения r2/ + rд/ и, следовательно, rд/.
elenergi.ru
При управлении моментом при торможении противовключением асинхронного двигателя с короткозамкнутым ротором с контролем скорости применяется узел схемы, приведенный на рисунке 1. В качестве реле противовключения используется реле контроля скорости SR, укрепляемое на двигателе. Реле настраивается на напряжение отпадания, соответствующее скорости, близкой к нулю и равной (0,1 — 0,2) ωуст.
Схема используется для остановки двигателя с торможением противовключением в реверсивной (рис. 1, а) в в нереверсивной (рис. 1, б) схемах. Команда SR используется для отключения контакторов КМ2 или КМ3 и КМ4, отключающих обмотку статора от напряжения сети при скорости двигателя, близкой к нулю. При реверсировании двигателя команды SR не используются.
 Рис. 1: а — реверсивная схема; б — нереверсивная схема
Рис. 1: а — реверсивная схема; б — нереверсивная схема
Узел управления асинхронным двигателем с фазным ротором в режиме торможения противовключением с одной ступенью, состоящей из R1 и R2, приведен на рисунке 2. Управляющее реле противовключения KV, в качестве которого применяется, например, реле напряжения постоянного тока типа РЭВ301, которое подключено к двум фазам ротора через выпрямитель V. Реле настраивается на напряжение отпадания.
Часто для настройки реле KV используется дополнительный резистор R3. Схема в основном применяется при реверсировании асинхронных двигателей со схемой управления, приведенной на рисунке 2, а, но может использоваться и при остановке в нереверсивной схеме управления, приведенной на рисунке 2, б.
При пуске двигателя реле противовключения КV не включается и ступень противовключения резистора ротора R1 выводится сразу после подачи управляющей команды на пуск.
 Рис. 2: а — реверсивная схема; б — нереверсивная схема
Рис. 2: а — реверсивная схема; б — нереверсивная схема
В режиме противовключения после подачи команды на реверс (рис. 2, а) или остановку (рис. 2, б) скольжение электродвигателя повышается и происходит включение реле KV. Реле KV отключает контакторы КМ4 и КМ5 и тем самым вводит полное сопротивление R1 + R2 ротор двигателя.
В конце процесса торможения при скорости асинхронного двигателя, близкой к нулю и составляющей примерно 10 — 20 % установившейся начальной скорости ωпер = (0,1 — 0,2) ωуст, реле KV отключается, обеспечивая команду на отключение ступени противовключения R1 с помощью контактора КМ4 и на реверсирование электродвигателя в реверсивной схеме или команду на остановку электродвигателя в нереверсивной схеме.
В приведенных схемах в качестве управляющего устройства может применяться командоконтроллер и другие аппараты.
www.mtomd.info
ПЛАН ЛЕКЦИИ
Основные сведения о способахторможения асинхронных двигателей
Рекуперативное торможениепри спуске тяжелого груза
Рекуперативное торможение при переходе с большей скорости на меньшую
Динамическое торможение асинхронных двигателей
Торможение асинхронных двигателей противовключением
Реверс трёхфазных асинхронных двигателей
Электрическое торможение применяют только в электроприводах судовых грузоподъемных механизмов, с целью «сброса» скорости перед срабатыванием основного тормоза. Тем самым облегчается работа основного тормоза, а именно: уменьшаются износ тормозных колодок и их нагрев.
Кроме того, электрическое торможение ограничено применяют в некоторых сиcтемах судовой электроавтоматики, например, авторулевых типа АТР, АИСТ и др.
Различают 5 видов электрического торможения асинхронных двигателей:
динамическое;
рекуперативное;
торможение противовключением при активном статическом моменте;
торможение противовключением при реактивном статическом моменте.
однофазное.
Из всех видов торможения на судах чаще всего применяется рекуперативное (в электроприводах грузоподъемных механизмов)
Асинхронные машины, как и все электрические машины, обратимы, т.е. могут работать как двигатель и как генератор.
Если под действием внешних сил или по инерции ротор асинхронного двигателя будет вращаться в направлении поля статора со скоростью большей скорости поля статора  , то двигатель перейдет в режим генераторного рекуперативного торможения.
, то двигатель перейдет в режим генераторного рекуперативного торможения.
Таким образом, обязательным условием генераторного режима является условие  , т.е. генераторному режиму соответствуют отрицательные скольжения, изменяющиеся от (нуля) 0 до
, т.е. генераторному режиму соответствуют отрицательные скольжения, изменяющиеся от (нуля) 0 до , (минус бесконечности)
, (минус бесконечности)

В двигательном режиме  поле статора пересекает обмотку статора и ротора в одном направлении и поэтому индуктирует в них (обмотках) совпадающее по фазе ЭДС
поле статора пересекает обмотку статора и ротора в одном направлении и поэтому индуктирует в них (обмотках) совпадающее по фазе ЭДС . При
. При обмотка ротора пересекается полем статора в противоположном направлении и ЭДС
обмотка ротора пересекается полем статора в противоположном направлении и ЭДС меняет направление на противоположное.
меняет направление на противоположное.
В результате ток статора  создается не напряжением сети
создается не напряжением сети , а ЭДС
, а ЭДС , т.е. асинхронная машина уже работает в качестве генератора и, перейдя в генераторный режим, по-прежнему потребляет из сети намагничивающий ток для возбуждения вращающегося магнитного поля статора. В соответствии с уравнением (7-58)
, т.е. асинхронная машина уже работает в качестве генератора и, перейдя в генераторный режим, по-прежнему потребляет из сети намагничивающий ток для возбуждения вращающегося магнитного поля статора. В соответствии с уравнением (7-58)

двигатель создает изменивший направление (тормозной) электромагнитный момент.
Рекуперативное торможение при спуске тяжелого груза
Торможение с рекуперацией используют при спуске тяжелого груза.

Рис. (1-1) Переход асинхронного двигателя в рекуперативный режим под действием статического момента. C D – участок рекуперативного торможения (скорость ротора больше скорости поля статора  ).
).
Для получения этого вида торможения двигатель включают в направлении на «спуск», сразу же переводя привод в режим силового спуска. При пуске двигатель развивает момент  , который направлен согласно со статическим моментом механизма
, который направлен согласно со статическим моментом механизма  .
.
Под действием динамического момента равного сумме этих двух моментов

двигатель ускоряется по траектории «АВС» до скорости  .
.
В точке «С» скорость ротора увеличивается до скорости вращения магнитного поля обмотки статора. Поскольку в точке «С» скорости ротора и магнитного поля одинаковы, двигатель в этой точке переходит режим идеального холостого хода, и его электромагнитный момент М = 0.
При достижении скорости большей чем  (в точке «С»), двигатель переходитв режим рекуперативного торможения (скорость ротора после точки «С» становится больше скорости поля статора
(в точке «С»), двигатель переходитв режим рекуперативного торможения (скорость ротора после точки «С» становится больше скорости поля статора ), и электропривод продолжает разгоняться на спуск под действием движущего статического момента механизма
), и электропривод продолжает разгоняться на спуск под действием движущего статического момента механизма . На участкеC D статический момент механизма преодолевает увеличивающийся с возрастанием скорости тормозной момент двигателя
. На участкеC D статический момент механизма преодолевает увеличивающийся с возрастанием скорости тормозной момент двигателя 
При скорости  (в точке «D») моменты двигателя и механизма уравновешивают друг друга
(в точке «D») моменты двигателя и механизма уравновешивают друг друга
 ,
,
в результате уравновешивания моментов наступает установившийся режим рекуперативного торможения с постоянной скоростью  [в точке «D»
[в точке «D»  . Происходит силовой спуск груза со скоростью
. Происходит силовой спуск груза со скоростью . Этот режим будет продолжаться до тех пор, пока не изменяться условия работы привода.
. Этот режим будет продолжаться до тех пор, пока не изменяться условия работы привода.
Т.о., на отрезке «СD» электромагнитный момент двигателя направлен на подъем (момент двигателя положительный), а фактически происходит спуск груза, так как скорость отрицательная. Электромагнитный момент на отрезке «СD» является тормозящим, и он стабилизирует скорость спуска груза, не давая грузу разгоняться свыше скорости  , соответствующей точке «D».
, соответствующей точке «D».
studfiles.net
Торможение противовключением

Торможение противовключением применяется для быстрой остановки двигателя. Оно может быть осуществлено несколькими способами. В первом способе, в работающем двигателе, меняют две фазы местами, с помощью выключения контактора K1 и включения K2. При этом направление вращения магнитного поля статора меняется на противоположное. Возникает большой тормозной момент, и двигатель быстро останавливается. Но для того чтобы ограничить большие токи в момент увеличения тормозного момента, необходимо вводить в обмотку статора или ротора дополнительное сопротивление.
Во втором способе двигатель используют как тормоз для груза. То есть, если груз спускается вниз, то двигатель должен работать, наоборот, на подъем. Для этого в цепь ротора двигателя вводится большое добавочное сопротивление. Но его пусковой момент оказывается меньше чем момент нагрузки, и двигатель работает при некоторой небольшой скорости, тем самым обеспечивая плавный спуск.
По сути, торможение противовключением осуществляется по схеме реверса двигателя.
Магнитное поле, ось которого вращается в пространстве с постоянной угловой частотой, называется вращающимся магнитным полем. Если при этом величина индукции в любой точке оси магнитного поля остается постоянной, то такое поле называется круговым вращающимся магнитным полем. Это связано с тем, что его можно изобразить вращающимся в пространстве вектором постоянной длины, конец которого при вращении описывает окружность.
Формирование кругового вращающегося магнитного поля является необходимым условием работы асинхронных и синхронных машин. Для этого в пазы пакета статора (рис. 1) укладывают три одинаковые обмотки (катушки), состоящие из двух частей, располагающихся диаметрально противоположно в пакете статора. Причем оси трех обмоток статора смещены по отношению друг к другу на 120° .
МДС обмотки электрической машины необходимо знать для построения пространственного распределения и расчета магнитного поля. Пользоваться кривой МДС бывает удобнее, чем определять картину поля, так как последняя зависит от магнитной проводимости воздушного зазора, которую зачастую трудно найти из-за сложной конфигурации поверхностей, ограничивающих его. Кроме того, проводимость воздушного зазора изменяется при вращении ротора, а при насыщении магнитопровода на пространственное распределение поля [см. графики В(х)] влияет магнитная проводимость стальных участков магнитной цепи.
МДС катушки. По катушке (см. рис. 8.1, а) протекает синусоидальный ток i=Imsinωt. Ее МДС равномерно распределена в пространстве в пределах полюсного деления и пульсирует во времени. Для любой силовой линии магнитного поля (трубки проводимости) можно записать закон полного тока:
Если замкнутую силовую линию поля разделить по длине l на п участков, в пределах каждого из которых напряженность Нn магнитного поля будет одинаковой, т.е. не будет зависеть от длины участка ln, то интеграл можно заменить суммой:

Произведение Нn1n = Fn называется падением магнитного потенциала на n-ом участке, или его магнитным напряжением.
В магнитной цепи электрической машины есть два типа участков с существенно разными магнитными проницаемостями: воздушные и стальные. Магнитная проницаемость электротехнической стали на несколько порядков выше, чем магнитная проницаемость воздуха μ0.
Обозначим магнитные напряжения воздушных и стальных участков магнитной цепи машины соответственно Fδ и FСТ. Тогда, согласно закону полного тока, их сумма будет равна МДС катушки Fк:
.
Силовая линия магнитного поля включает в себя два расчетных воздушных зазора [см. (7.1)], поэтому 
,
где Hδ — напряженность магнитного поля в воздушном зазоре. Известно, что Bδ = μ0 Hδ, а постоянная μ0 = 4π · 107 Гн/м.
Отсюда 
Индукция магнитного поля в любой точке воздушного зазора связана с МДС катушки в этой точке следующим соотношением:
Так как часто Fδ>> Fст, падением магнитного потенциала на стальных участках магнитной цепи электрической машины можно пренебречь, тогда

Расчет магнитной цепи и МДС электрической машины обычно проводят для максимального значения Fк, т. е. когда i = Iт и ордината прямоугольника на рис. 8.1, а равна Fк /2 = Iтwк /2. Ряд Фурье такой функции F(х) содержит пространственные гармоники только нечетных порядков, т.е. v= 1, 3, 5, 7, .... Амплитуда 1-й гармоники МДС катушки в этом случае
(9.28)
Из разложения прямоугольной функции в ряд Фурье известно, что амплитуда любой высшей гармоники (9.29) 
Амплитуда 1-й гармоники МДС катушечной группы. Основные гармоники МДС катушек в катушечной группе сдвинуты в пространстве на зубцовое деление (см. рис. 8.3, б). Сумма синусоид q катушек, смещенных по оси х, также будет пространственной синусоидой, но ее амплитуда Fqm будет меньше арифметической суммы амплитуд МДС q катушек, т.е. Fqm < qF1m. Очевидно, что отношение этих амплитуд равно коэффициенту распределения 1-й гармоники [см. (9.13)]: геометрическая сумма МДС катушек
арифметическая сумма МДС катушек
Таким образом, с учетом (9.28), для катушечной группы можно записать

Выразив амплитуду тока через его действующее значение Iт =  I, получим
I, получим
(9.30)
Формула (9.30) справедлива для обмотки с диаметральным шагом (у = τ) и без скоса пазов. При укороченном шаге (у < τ) и наличии скоса амплитуда 1-й гармоники МДС катушечной группы 
(9.31)
Амплитуда 1-й гармоники МДС фазы. Каждая фаза обмотки имеет в пределах полюсного деления т одну катушечную группу. Следовательно, МДС фазы обмотки равна МДС катушечной группы. Введем в формулу (9.31) число витков фазы.
Из (8.1) получим выражение  , подставив которое в (9.31), получим формулу для амплитуды 1-й гармоники МДС фазы
, подставив которое в (9.31), получим формулу для амплитуды 1-й гармоники МДС фазы
(9.32) 
Формула (9.32) справедлива как для однослойных, так и для двухслойных обмоток
studfiles.net
Торможение противовключением может быть сделано двумя путями: путем чередования двух фаз питающего напряжения (рисунок 1 кривая А) или при активном моменте нагрузки на валу двигателя, например, грузоподъемный механизм (рисунок 1 кривая Б).
Данное торможение применяют как один из способов остановки двигателя.
Рассмотрим первый путь. На рисунке 1 мы видим механическую характеристику асинхронного двигателя при торможении противовключением.

Рисунок 1 – Торможение противовключением
Допустим, двигатель сейчас работает в точке 1 – номинальная работа асинхронного двигателя, осуществив переключение двух фаз, изменит текущее направление вращения магнитное поле статора, и двигатель перейдет в точку 2, стоит заметить, что с точки 1 в точку 2, он перейдет при тех же оборотах вращения вала. Далее обороты начнут спадать, и в момент времени, когда двигатель дойдет до точки 3 (нуля), его необходимо отключить от сети, иначе он начнет разгонятся и перейдет опять в двигательный режим – точку 4, однако направление будет обратно предыдущему.
Скольжение в данном случае будет изменяться от S=2 до S=1. Хочу обратить ваше внимание, что при торможении противовключением, токи в обмотке двигателя будут в 6-8 раз превышать номинальный ток двигателя. В данном режиме очень сильно нагревается двигатель, что влияет на его износ. В этот момент у короткозамкнутых асинхронных двигателей происходит перегрузка по току, вследствие эффекта вытеснения тока активное сопротивление ротора возрастает.
Для того что бы увеличить эффективность торможения асинхронных двигателей с фазным ротором, в цепь ротора необходимо добавить сопротивление, что дает нам ограничение по току и увеличение момента.
Рассмотрим второй путь. Как было сказано ранее, этот способ используется при активном моменте нагрузки на валу.
К примеру, необходимо опустить груз, обеспечивая торможение с постоянной скоростью при помощи асинхронного двигателя, и поэтому, для этого вводится добавочное (дополнительное) сопротивление в цепь ротора, в следствии чего двигатель переходит на искусственную механическую характеристику (рисунок 1 кривая Б), груз будет опускаться с постоянной скоростью –n(cопр). Скольжение может изменяться о S=1 до S =2.
В этой статье я хотел бы еще упомянуть про режим противовключения в котором имеет место рекуперация энергии в сеть. Этот режим применяется для того, что бы осуществить спуск груза, при котором будет происходить отдача энергии в сеть, данный режим применяется в грузоподъемных механизмах, например, в лифтах и т.п. Допустим, что работая в точке 1, которая будет соответствовать подъему какого либо объекта, нам необходимо осуществить спуск с постоянной скоростью и рекуперацией энергии. Находясь в точке 1, мы переключаем двигатель в режим противовключения, переходим в точку 2 и двигатель начинает замедлятся, дойдя до точки 3, асинхронный двигатель начнёт вращаться в обратном направлении, и будет разгонятся до точки 4, но так как у нас присутствует момент на валу двигателя (груз), то это создает дополнительный момент, который имеет то же направление что и вращение двигателя, в данном случае он не будет тормозить двигатель (в двигательном режиме), а наоборот будет разгонять двигатель до точки 5, что переводит его в генераторный режим, в котором, как вы видите, груз будет опускаться с постоянной скоростью и будет происходить рекуперация энергии в сеть. Так же в частном случае, при переключении скорости двигателя с помощью изменения пар полюсов, тоже может происходить рекуперация энергии.
h4e.ru
П олная механическая характеристика асинхронного двигателя во всех квадрантах поляМ-s, представлена на рис.4.13.
олная механическая характеристика асинхронного двигателя во всех квадрантах поляМ-s, представлена на рис.4.13.
Асинхронный двигатель может работать в трех тормозных режимах: реку-перативного торможения, динамического торможения и торможения противо-включением; специфичес-ким тормозным режимом является также конден-саторное торможение.
Р
Рис.4.13. Полная механическая характеристика асинхронного двигателя
екуперативное генераторное торможение возможно, когда скорость ротора выше скорости вращения электромагнитного поля статора, чему соответствует отрицательное значение скольжения .
.Для того, чтобы ротор двигателя перешел синхронную скорость и разогнался до скорости выше синхронной, к его валу должен быть приложен внешний положительный по знаку вращающий момент. Это может быть, например, в приводе подъемной лебедки в режиме спуска груза.
Механическая характеристика асинхронного двигателя в режиме рекуперативного торможения идентична (с учетом угловой симметрии) характеристике двигателя в двигательном режиме. Расчет характеристик может производиться по формуле Клосса (4.27). Максимальный момент в режиме рекуперативного торможения несколько выше, чем максимальный момент в двигательном режиме. Для рекуперативного режима
 .
.
Отношение Мк в двигательном режиме к Мкг в тормозном будет:
 .
.
Н есколько большая величина максимального момента в генераторном режиме объясняется тем, что потери в статоре (на сопротивленииr1) в двигательном режиме уменьшают момент на валу, а в генераторном режиме момент на валу должен быть больше, чтобы покрыть потери в статоре.
есколько большая величина максимального момента в генераторном режиме объясняется тем, что потери в статоре (на сопротивленииr1) в двигательном режиме уменьшают момент на валу, а в генераторном режиме момент на валу должен быть больше, чтобы покрыть потери в статоре.
Э
Рис.4.14. Энергетическая диаграмма асинхронного двигателя в режиме рекуперативного торможения
нергетический баланс в режиме рекуперативного гене-раторного торможения опреде-ляется следующим (рис.4.14). Механическая мощность, по-ступающая на вал двигателя, преобразуется в электромаг-нитную мощность вращающе-гося поляРэм и электрическую мощность, трансформируемую в роторную цепь двигателя. По аналогии с (4.35) получим  .
.
Электромагнитная мощность, за исключением потерь в статоре, отдается в питающую сеть. Отметим, что в режиме рекуперативного торможения асинхронный двигатель генерирует и отдает в сеть активную мощность, а для создания электромагнитного поля асинхронный двигатель и в режиме генератора должен обмениваться с сетью реактивной мощностью. Поэтому асинхронная машина не может работать автономным генератором при отключении от сети. Возможно, однако, подключение асинхронной машины к конденсаторным батареям, как к источнику реактивной мощности. Такая схема рассмотрена ниже.

Рис.4.15. Схемы подключения асинхронного двигателя в режиме динамического торможения
Способ динамического торможения характеризуется тем, что статорные обмотки отключаются от сети переменного тока и подключаются к источнику постоянного напряжения (см.рис.4.15). При питании обмоток статора постоянным током создается неподвижное в пространстве электромагнитное поле, т.е. скорость вращения поля статора  . Скольжение будет равно
. Скольжение будет равно ,
,
г де:
де: - номинальная угловая скорость вращения поля статора.
- номинальная угловая скорость вращения поля статора.
В
Рис.4.16. Механические характеристики асинхронного двигателя в режиме динамического торможения
ид механических характе-ристик (см.рис.4.16) подобен характеристикам в режиме реку-перативного торможения. Исход-ной точкой характеристик явля-ется начало координат. Регу-лировать интенсивность динами-ческого торможения можно из-меняя величину тока возбуж-денияIдт в обмотках статора. Чем выше ток, тем больший тормозной момент развивает двигатель. При этом, однако, нужно учитывать, что при токах начинает сказываться насыщение магнитной цепи двигателя.
начинает сказываться насыщение магнитной цепи двигателя. Для асинхронных двигателей с фазным ротором регулирование тормозного момента может производиться также введением дополнительного сопротивления в цепь ротора. Эффект от введения добавочного сопротивления аналогичен тому, которое имеет место при пуске асинхронного двигателя: благодаря улучшению  повышается критическое скольжение двигателя и увеличивается тормозной момент при больших скоростях вращения.
повышается критическое скольжение двигателя и увеличивается тормозной момент при больших скоростях вращения.
Работу асинхронного двигателя в режиме динамического торможения можно рассматривать как работу трехфазного асинхронного двигателя при питании его постоянным током, т.е. током при частоте f1=0. Второе отличие заключается в том, что обмотки статора питаются не от источника напряжения, а от источника тока. Следует также иметь в виду, что в схеме динамического торможения ток Iдт протекает (при соединении обмоток в звезду) не по трем, а по двум фазным обмоткам.
Для расчета характеристик нужно заменить реальный Iдт эквивалентным током Iэкв, который, протекая по трем фазным обмоткам создает ту же намагничивающую силу, что и ток Iдт.
Д ля схемы рис.4.15б–Iэкв=0,816Iдт.
ля схемы рис.4.15б–Iэкв=0,816Iдт.
Для схемы рис.4.15в- Iэкв=0,472Iдт.
С учетом указанных осо-бенностей векторная диаграмма асинхронной машины в режиме динамического торможения (рис.4.17) будет определяться соотношением:
 .
.
Т
Рис.4.17. Векторная диаграмма асинхронного двигателя в режиме динамического торможения
ок намагничивания зависит от тока ротора при постоянномIэкв. По мере роста скольжения ток намагничивания будет уменьшаться под действием реактивного тока ротора.Приведенный ток ротора будет равен
 ,
,
где:  - индуктивное сопротивление контура намагничивания и ротора двигателя, приведенные к частоте 50Гц.
- индуктивное сопротивление контура намагничивания и ротора двигателя, приведенные к частоте 50Гц.
Упрощенная формула для приближенного расчета механических характеристик (не учитывающая насыщение двигателя) подобна формуле Клосса для двигательного режима
 .
.
Здесь  ,
,
 ,
,
 - номинальная скорость вращения электромагнитного поля.
- номинальная скорость вращения электромагнитного поля.
Следует подчеркнуть, что критическое скольжение в режиме динамического торможения существенно меньше критического скольжения в двигательном режиме, т.к.  . Для получения критического тормозного момента, равного критическому моменту в двигательном режиме токIэкв должен в 2-4 раза превышать номинальный ток намагничивания I0. Напряжение источника питания постоянного тока Uд будет значительно меньше номинального напряжения и примерно равно
. Для получения критического тормозного момента, равного критическому моменту в двигательном режиме токIэкв должен в 2-4 раза превышать номинальный ток намагничивания I0. Напряжение источника питания постоянного тока Uд будет значительно меньше номинального напряжения и примерно равно  .
.
Энергетически в режиме динамического торможения асинхронный двигатель работает как синхронный генератор, нагруженный на сопротивление роторной цепи двигателя. Следовательно, вся механическая мощность, поступающая на вал двигателя при торможении, преобразуется в электрическую и идет на нагрев сопротивлений роторной цепи.
Возбуждение асинхронной машины в режиме динамического торможения может осуществляться не только подачей постоянного тока в обмотки статора машины, но также в режиме самовозбуждения путем подключения конденсаторов к цепям статора асинхронной машины, как это показано на рис.4.18. Такой способ торможения называют конденсаторным торможением асинхронных двигателей. По энергетической сущности этот вид торможения идентичен динамическому торможению, т.к. энергия, поступающая с вала, преобразуется в электрическую и выделяется в виде потерь в роторе двигателя.
Рис.4.18. Схема включения асинхронного двигателя в режиме динамического торможения с самовозбуждением от конденсаторов
 Процесс самовозбуждения асинхронного двигателя про-исходит следующим образом. Под действием остаточного потока ротора в обмотках статора наводится э.д.с., под действием которой возникает намагничивающий ток, проте-кающий через конденсаторы. При этом увеличивается поток машины, следовательно, наво-димая э.д.с. и ток намаг-ничивания. Верхняя и нижняя границы режима самовозбуждения и величина тормозного момента зависят от величины емкости конденсаторов [1-3]. Данный способ торможения применяется для приводов малой мощности (до 5кВт), т.к. требует установки конденсаторов значительного объема.
Процесс самовозбуждения асинхронного двигателя про-исходит следующим образом. Под действием остаточного потока ротора в обмотках статора наводится э.д.с., под действием которой возникает намагничивающий ток, проте-кающий через конденсаторы. При этом увеличивается поток машины, следовательно, наво-димая э.д.с. и ток намаг-ничивания. Верхняя и нижняя границы режима самовозбуждения и величина тормозного момента зависят от величины емкости конденсаторов [1-3]. Данный способ торможения применяется для приводов малой мощности (до 5кВт), т.к. требует установки конденсаторов значительного объема.Торможение противовключением может быть в двух случаях:
в первом, когда при работе двигателя необходимо его экстренно остановить, и с этой целью меняют порядок чередования фаз питания обмоток статора двигателя;
во втором, когда электромеханическая система движется под действием спускаемого груза, а двигатель включается в направлении подъема, чтобы ограничить скорость спуска (режим протягивающего груза).
В обоих случаях электромагнитное поле статора и ротор двигателя вращаются в разные стороны. Скольжение двигателя в режиме противовключения всегда больше 1
 .
.
В первом случае (см.рис.4.19) двигатель, работавший в т.1, после изменения порядка чередования фаз двигателя переходит в тормозной режим в т.1’ и скорость привода быстро снижается под действием тормозного момента Мт и статического момента МС. При замедлении до скорости, близкой к нулю, двигатель необходимо отключить, иначе он будет разгоняться в противоположном направлении вращения.
В о втором случае после снятия механического тормоза двигатель, включенный в направлении вверх, под действием силы тяжести спускаемого груза будет вращаться в противоположном направлении со скоростью, соответствующей точке 2. Работа в режиме противовключения под действием протягивающего груза возможна при использовании двигателей с фазным ротором. При этом в цепь ротора вводится значительное добавочное сопротивление, которому соответствует характеристика 2 на рис.4.19.
о втором случае после снятия механического тормоза двигатель, включенный в направлении вверх, под действием силы тяжести спускаемого груза будет вращаться в противоположном направлении со скоростью, соответствующей точке 2. Работа в режиме противовключения под действием протягивающего груза возможна при использовании двигателей с фазным ротором. При этом в цепь ротора вводится значительное добавочное сопротивление, которому соответствует характеристика 2 на рис.4.19.
Энергетически режим про-тивовключения крайне неб-лагоприятен. Ток в этом режи-ме для асинхронных корот-козамкнутых двигателей пре-восходит пусковой, достигая 10-кратного значения. Потери в роторной цепи двигателя складываются из потерь корот-кого замыкания двигателя и мощности, которая передается на вал двигателя при торможении
 .
.
Д
Рис.4.19. Режим противовключения асинхронного двигателя
1, 1’ – естественные механические характеристики при включении «вперед» и «назад»
2 – механическая характеристика двигателя с фазным ротором со включенным добавочным сопротивлением в цепь ротора.
ля короткозамкнутых двигателей режим противовключения возможен только в течение нескольких секунд. При использовании двигателей с фазным ротором в режиме противовключения обязательно включение в цепь ротора добавочного сопротивления. В этом случае потери энергии остаются такими же значительными, но они выносятся из объема двигателя в роторные сопротивления.studfiles.net
Торможение АД можно осуществить как при питании от сети переменного тока, так и путем включения в цепь статора источника постоянного тока. Кроме того, для подтормаживания Д используют режим самоторможения [9].
При включении АД по основной схеме может быть осуществлено торможение противовключением и рекуперативное торможение.
1. Торможение противовключением.
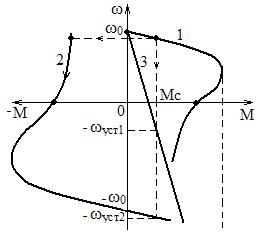
Рис. 5.13. Механические характеристики АД
при торможении противовключением
Этот режим можно осуществить двумя путями:
1) изменяя порядок чередования фаз. В этом случае направление вращения магнитного поля меняется на противоположное и Д с естественной характеристики 1 переходит на тормозную характеристику 2, расположенную во втором квадранте. В момент, когда частота вращения становится близкой к нулю, Д необходимо отключить от сети. В противном случае он реверсируется.
2) нагружая Д активным моментом, при введении в цепь ротора большого добавочного сопротивления. В этом случае вращающий момент нагрузки оказывается больше движущего момента Д. Поскольку они направлены в разные стороны, то Д переходит на работу по характеристике 3, и новое установившееся значение скорости будет соответствовать противоположному направлению вращения Д, то есть имеем спуск груза с подтормаживанием за счет включенного на подъем Д.
 |
Рис. 5.14. Механические характеристики АД
при рекуперативном торможении
Рекуперативное торможение самое экономичное, поскольку Д включается параллельно с сетью и работает в режиме генератора, то есть энергия, затрачиваемая на торможение, возвращается обратно в сеть. Это торможение имеет место тогда, когда частота вращения выше синхронной. На практике этот метод широко используется в многоскоростных Д при переходе с большей скорости на меньшую, а также при уменьшении частоты питающего напряжения в системе преобразователь частоты - двигатель.
3. Динамическое торможение.


Рис. 5.15. Динамическое торможение АД: а) схема включения АД;
б) механические характеристики АД
Для осуществления этого режима обмотку статора отключают от сети и в две фазы статора подают постоянный ток. В результате ротор вращается в неподвижном магнитном поле. При этом цепь ротора может быть закорочена, либо в нее может быть введено  . Возникает тормозной момент, который и тормозит двигатель. Электромеханическую характеристику Д в режиме динамического торможения можно получить из схемы замещения. Она располагается в первом квадранте (кривая 1), скольжение в режиме динамического торможения определяется как
. Возникает тормозной момент, который и тормозит двигатель. Электромеханическую характеристику Д в режиме динамического торможения можно получить из схемы замещения. Она располагается в первом квадранте (кривая 1), скольжение в режиме динамического торможения определяется как  . Форма тормозной характеристики и величина тормозного момента зависят от схемы соединения обмоток. Кроме того, вид характеристики определяется величиной тормозного тока и, следовательно, сопротивлением потенциометра
. Форма тормозной характеристики и величина тормозного момента зависят от схемы соединения обмоток. Кроме того, вид характеристики определяется величиной тормозного тока и, следовательно, сопротивлением потенциометра  . При одном и том же значении можно получить различные характеристики (кривые 2 и 4). Следует иметь в виду, что момент будет пропорционален квадрату тока. При постоянном тормозном токе, изменяя , получим другое семейство характеристик (кривые 2 и 3).
. При одном и том же значении можно получить различные характеристики (кривые 2 и 4). Следует иметь в виду, что момент будет пропорционален квадрату тока. При постоянном тормозном токе, изменяя , получим другое семейство характеристик (кривые 2 и 3).
Этот режим получил большое распространение.
Недостатком этого способа является уменьшение тормозного момента до нуля при снижении скорости до нуля.
4. Торможение АД при самовозбуждении.
Этот вид торможения основан на том, что после отключения АД от сети его электромагнитное поле затухает не мгновенно. Если использовать энергию этого затухающего поля, то можно обеспечить самовозбуждение Д и осуществить тормозной режим. На практике используют два способа торможения с самовозбуждением: конденсаторное и магнитное торможение.
 а) б)
а) б)

Рис. 5.16. Конденсаторное торможение АД: а) схема включения АД;
б) механические характеристики АД
При конденсаторном торможении самовозбуждение осуществляется за счет включения в цепь статора конденсаторов. Причем конденсаторы могут подключаться постоянно (глухое включение) или при помощи контактора. Увеличение емкости конденсаторов приводит к смещению вниз и влево характеристик. При отключении двигателя накопленная в электрическом поле энергия самовозбуждает его, что приводит к появлению тормозного момента.
Рис. 5.17. Схема включения АД при магнитном торможении
Магнитное торможение. В настоящее время с использованием тиристорных коммутирующих устройств и тиристорных регуляторов напряжения широкое распространение получило магнитное торможение. Этот способ реализуется при отключении Д от сети и закорачивании обмоток статора контактором  . При этом появляется электрическая цепь и за счет запасенной в Д электромагнитной энергии осуществляется самовозбуждение Д.
. При этом появляется электрическая цепь и за счет запасенной в Д электромагнитной энергии осуществляется самовозбуждение Д.
Особенностью этого способа является быстротечность, которая определяется небольшим временем затухания магнитного поля. Обычно этот режим осуществляется в сочетании с режимом динамического торможения. Такое комбинированное торможение реализуется с помощью тиристорных пускорегулирующих устройств.

Рис. 5.18. Схема включения АД при комбинированном торможении
При отключении Д от сети тиристоры  закрыты, сигнал подается на
закрыты, сигнал подается на  и он замыкает обмотку статора, осуществляя магнитное торможение. Спустя короткое время закрывается , открывается один из тиристоров коммутирующей группы , например
и он замыкает обмотку статора, осуществляя магнитное торможение. Спустя короткое время закрывается , открывается один из тиристоров коммутирующей группы , например  . В результате в одну из обмоток статора подается выпрямительный ток и осуществляется динамическое торможение до остановки Д.
. В результате в одну из обмоток статора подается выпрямительный ток и осуществляется динамическое торможение до остановки Д.
www.poznayka.org










