Наибольшее распространение в промышленности получили дешевые, простые в изготовлении и обслуживании, долговечные трехфазные асинхронные двигатели. Все трехфазные асинхронные двигатели имеют конструктивно одинаковые статоры и различаются выполнением обмотки ротора. По конструкции обмотки ротора эти двигатели подразделяются на два типа: с короткозамкнутой обмоткой и с фазной обмоткой.
Трехфазный двигатель предназначен для включения в трехфазную сеть, поэтому он должен иметь обмотку статора, состоящую из трех фазных обмоток, при прохождении через которые токи, поступающие из трехфазной сети, возбуждают вращающееся магнитное поле. Для усиления магнитного поля и придания ему необходимой формы сердечник статора и ротора выполняют из электрической стали. Сердечник имеет вид полого цилиндра с продольными пазами по внутренней поверхности. В пазы укладываются три одинаковые фазные обмотки, сдвинутые друг относительно друга на угол 120.
К ороткозамкнутый ротор состоит из стального вала, цилиндрического сердечника, насаженного на вал ротора, короткозамкнутой обмотки и лопастей, осуществляющих вентиляцию машины. Следует отметить, что обмотка короткозамкнутого ротора не изолируется от сердечника из-за того, что между удельными сопротивлениями обмотки и стали сердечника имеется значительная разница и индуцированные в обмотке токи замыкаются в основном по ее стержням и торцовым кольцам.
ороткозамкнутый ротор состоит из стального вала, цилиндрического сердечника, насаженного на вал ротора, короткозамкнутой обмотки и лопастей, осуществляющих вентиляцию машины. Следует отметить, что обмотка короткозамкнутого ротора не изолируется от сердечника из-за того, что между удельными сопротивлениями обмотки и стали сердечника имеется значительная разница и индуцированные в обмотке токи замыкаются в основном по ее стержням и торцовым кольцам.
В асинхронных двигателях средней и малой мощности короткозамкнутую обмотку ротора получают путем заливки расплавленного алюминиевого сплава в продольные пазы сердечника. Вместе с обмоткой также вставляют торцовые короткозамыкающие кольца и лопасти для вентиляции машины.
У двигателей с фазным ротором в продольные пазы сердечника ротора укладывают три одинаковые изолированные обмотки, в пространстве на 120 градусов, причем концы фаз объединены в общую точку, образуя звезду, а начала присоединены к трем контактным кольцам, размещенным на валу. С увеличением активного сопротивления обмотки ротора уменьшается пусковой ток, т.е. облегчается пуск двигателя. Также можно регулировать частоту вращения двигателя, изменяя активное сопротивление с помощью реостата. Все это позволяет применять двигатели с фазным ротором для привода машин, требующих больших пусковых моментов.
По конструктивному выполнению двигатели с короткозамкнутым ротором проще двигателей с контактными кольцами. Они более надежны в работе, однако имеют сравнительно небольшой пусковой момент. Поэтому их применяют для привода машин, для которых не требуются большие пусковые моменты, а также машин и механизмов небольшой мощности. Асинхронные двигатели малой мощности и микродвигатели выполняют также с короткозамкнутыми роторами.
В обмотке статора асинхронного двигателя при прохождении переменного тока возбуждается вращающееся магнитное поле, которое, пересекая проводники обмотки ротора, наводит в них переменную э.д.с. Так как обмотка ротора замкнута, то наведенная э.д.с. вызывает в роторе ток. В результате взаимодействия проводников с током ротора и вращающегося магнитного поля возникает сила, заставляющая ротор вращаться в направлении вращения поля. Таким образом, принцип работы асинхронного двигателя основан на использвании взаимодействия вращающегося магнитного поля, создаваемого переменным током в обмотке статора и проводниками с током обмотки ротора. Т.к. вращение магнитного поля статора происходит асинхронно с вращением ротора двигателя, т.е. частоты вращения ротора и поля отличны, двигатель называют асинхронным.
На рисунке 12.8 схематически показан северный полюс вращающегося магнитного поля, который перемещается по ходу часовой стрелки с частотой вращения n0 (об/с). Допустим, в начальный момент ротор неподвижен и под северным полюсом находится один из проводников обмотки ротора. Движение полюса по часовой стрелке относительно этого проводника равносильно движению проводника при неподвижном полюсе против часовой стрелки. При таком направлении движения полюса, согласно правилу правой руки, наведенный в проводнике обмотки ротора ток направлен к читателю. По правилу левой руки находим, что на проводник ротора с током заданного направления дествует электромагнитная сила F, которая направлена в сторону вращения магнитного поля.
При пуске асинхронного двигателя по мере разбега ротора разность частот вращающегося поля и ротора уменьшается. Однако ротор не может вращаться синхронно с полем, в нем не будет наводиться ток и, следовательно, исчезнет вращающий момент. В асинхронном двигателе частота вращения ротора меньше частоты вращения поля и ротор как бы скользит вдоль поля.Отношение разности частот вращзения поля n0 и ротора n к частоте вращения поля называют скольжением: s = (n0 – n)/n0, откуда n = (1 – s) n0.
Часто скольжение выражают в процентах: s = [(n0 – n)/n0]*100
Скольжение с изменением нагрузки двигателя изменяется. Обычно у асинхронных двигателей нормального исполнения при номинальной нагрузке напряжение составляет 1-6% . При неподвижном роторе s =1, при синхронной скорости s = 0. Если частоту вращения ротора увеличить до частоты выше синхронной, то асинхронная машина перейдет в генераторный режим.При генераторном режиме изменит направление электромагнитный момент М, который станет тормозящим, причем при этом асинхронная машина, получая механгическую энергию от первичного двигателя, превращает ее в электрическую, отдавая затем в сеть.Если ротор асинхронного двигателя затормозить, а затем вращать его в сторону, противоположную направлению вращения поля, то асинхронная машина перейдет в режим электромагнитного торможения, так как электромагнитный момент М направлен против вращения ротора и тормозит его. Итак, характерной особенностью АМ является наличие скольжения (n0≠n). На практике АМ в основном используют в двигательном режиме. В двигательном режиме за время одного периода Т вращающееся поле перемещается вдоль воздушного зазора (зазор между внутренней поверхностью статора и внешней поверхности ротора) на расстояние, равное части дуги внутренней окружности сердечника статора, приходящейся на пару полюсов, т.е. на расстояние двух полюсных делений.
58. ХАРАКТЕРИСТИКИ ГЕНЕРАТОРА НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ
Характеристика холостого хода.
Характеристика холостого хода представляет собой зависимость ЭДС на выводах генератора Е от тока возбуждения Iв при разомкнутой цепи якоря . Несовпадение кривых, полученных при увеличении и уменьшении тока возбуждения, объясняется наличием гистерезиса в стали, из которой выполнена магнитная система машины. Для практических целей обычно ограничиваются снятием части петли, которую получают, уменьшая ток Iв от максимального значения до нуля. При снятии характеристики холостого хода следует обращать внимание на то, чтобы ток возбуждения изменялся в одном направлении (или только увеличивался, или только уменьшался), так как в противном случае будет большой разброс точек из-за того, что они будут ложиться на разные гистерезисные кривые. В начальной части характеристики холостого хода ЭДС изменяется пропорционально току возбуждения, а затем рост ЭДС замедляется, что объясняется насыщением стальных участков магнитной цепи. Практическое значение характеристики холостого хода заключается в том, что по ней можно судить о степени насыщения магнитной цепи машины. Кроме того, эта характеристика необходима для построения других характеристик машины.
Нагрузочная характеристика.
Эта характеристика представляет собой зависимость напряжения на выводах машины U от тока возбуждения Iв при условии, что ток в цепи-якоря Iа поддерживается неизменным. Практическое значение нагрузочной характеристики состоит в том, что она позволяет количественно определить размагничивающее действие реакции якоря и исследовать зависимость этой реакции от насыщения магнитной цепи машины и тока якоря. Можно снять ряд нагрузочных характеристик для различных значений тока Iа. Если снимается одна нагрузочная характеристика, то чаще всего принимают, что Iа = Iном. Ток возбуждения изменяют в сторону уменьшения, начиная от максимального его значения.
Нагрузочная характеристика располагается ниже характеристики холостого хода из-за падения напряжения в цепи якоря и размагничивающего действия реакции якоря, уменьшающей магнитный поток и ЭДС машины.
Внешняя характеристика.
Эта характеристика является основной эксплуатационной характеристикой генератора. Она показывает, как изменяется напряжение на выводах машины U при возрастании тока Нагрузки I=Iа, если при этом на цепь возбуждения не оказывается никакого воздействия. Для генератора независимого возбуждения внешняя характеристика U=f(I) снимается при Iв =const.Исходной точкой для снятия внешней характеристики является точка, когда при номинальном токе нагрузки I=Iном на выходах генератора установлено номинальное напряжение Uном. Ток возбуждения, соответствующий U=Uном при I=Iном, называется номинальным током возбуждения Iв,ном. В процессе снятия внешней характеристики этот ток поддерживается постоянным. Начиная от исходной точки ток нагрузки постепенно уменьшается до нуля. По внешней характеристике определяют изменение напряжения ΔU Обычно его выражают в процентах номинального напряжения:
ΔU %=( (U0.- Uном )/Uном)*100,
Регулировочная характеристика.
Как следует из рассмотрения внешних характеристик генератора независимого возбуждения, при Iв=const напряжение на выводах генератора с изменением нагрузки не остается постоянным. Для того чтобы сохранить напряжение неизменным, необходимо регулировать ток возбуждения. Закон регулирования тока возбуждения с целью сохранения постоянства напряжения при изменении нагрузки дает регулировочная характеристика, представляющая собой зависимость Iв = f(I) при U=Uном=const. Начинают снимать ее в режиме холостого хода, когда I = 0. При увеличении тока нагрузки ток возбуждения Iв необходимо несколько увеличить, чтобы скомпенсировать уменьшение напряжения из-за падения напряжения и размагничивающего действия реакции якоря.
52. Схема замещения асинхронного двигателя
Для анализа работы асинхронного двигателя пользуются схемой замещения.
Схема замещения асинхронного двигателя аналогична схеме замещения трансформатора и представляет собой электрическую схему, в которой вторичная цепь (обмотка ротора) соединена с первичной цепью (обмоткой статора) гальванически вместо магнитной связи, существующей в двигателе.
Основное отличие асинхронного двигателя от трансформатора в электрическом отношении состоит в следующем. Если в трансформаторе энергия,переданная переменным магнитным полем во вторичную цепь, поступает к потребителю в виде электрической энергии, то в асинхронном двигателе энергия, переданная вращающимся магнитным полем ротору, преобразуется в механическую и отдается валом двигателя потребителю в виде механической энергии.
Электромагнитные мощности, передаваемые магнитным полем во вторичную цепь трансформатора и ротору двигателя, имеют одинаковые выражения:
Рэм = Р1 – ?Р1.
В трансформаторе электромагнитная мощность за вычетом потерь во вторичной обмотке поступает потребителю:
Р2 = Рэм – 3I22 r2 = 3U2 I2 cos?2 = 3I22 rП = 3I ' 22 r' П,
где rП – сопротивление потребителя.
В асинхронном двигателе электромагнитная мощность за вычетом потерь в обмотке ротора превращается в механическую мощность:
Р2 = Рмех = Рэм – 3I22 r2 = Pэм – 3I'22 r'2
Pмех = [3 I22 r2 (1–s)]/s = 3I'22 r'2 (1–s)]/s = 3I22 r'э = 3I'22 r'э
,
где r'э = [r'2 (1–s)]/s
Сравнивая выражения можно заключить, что r'П = r'э .
Таким образом, потери мощности в сопротивлении численно равны механической мощности, развиваемой двигателем.
Заменив в схеме замещения трансформатора сопротивление нагрузки r'П на r'э = [r'2 (1–s)]/s, получим схему замещения асинхронного двигателя. Все остальные элементы схемы аналогичны соответствующим элементам схемы замещения трансформатора: r1, x1 – активное сопротивление и индуктивное сопротивление рассеяния фазы обмотки ротора.
Приведенные значения определяются так же, как и для трансформатора:
r'2 = r2 k2 , x'2 = x2 k2,
где k = E1 /E2k = U1ф /E2k – коэффициент трансформации двигателя.
Может возникнуть сомнение в возможности использования гальванической связи цепей статора и ротора в схеме замещения, поскольку частоты в этих цепях на первый не одинаковы. Первая часть схемы замещения представляет собой эквивалентную схему фазы обмотки ротора, которая приведена к частоте тока статора. В реальном же двигателе в отличие от схемы замещения частоты
53. Механическая характеристика асинхронного двигателя
Механической характеристикой называется зависимость частоты вращения ротора двигателя или скольжения от момента, развиваемого двигателем при установившемся режиме работы: n = f(M) или s = f(M).
Механическая характеристика является одной из важнейших характеристик двигателя. При выборе двигателя к производственному механизму из множества двигателей с различными механическими характеристиками выбирают тот, механическая характеристика которого удовлетворяет требованиям механизма.
Уравнение механической характеристики асинхронного двигателя может быть получено на основании формулы Мэм = (3I22r2)/?0s и схемы замещения.
С помощью схемы замещения определяют приведенный ток фазы ротора:
I'2 = U1ф /?(r1 + r'2/s) + (x1 + x'2)2
где r'2/s = r'2 + r'2(1– s)/s
Полученное значение тока I'2 подставляют в уравнение момента, в котором предварительно I2 и r2 заменяют через их приведенные значения:
М = (3I22r2)/?0s = (3I'22r'2)/?0s
После подстановки получим
I'2 = 3U1ф2 r'2 / ?0s [(r1 + r'2/s) +(x1 + x'2)2]
Это выражение представляет собой уравнение механической характеристики, поскольку оно связывает момент и скольжение двигателя. Остальные входящие в уравнение величины: напряжение сети и параметры двигателя – постоянны и не зависят от s и M. Располагая параметрами двигателя, можно рассчитать и построить его механическую характеристику, которая будет иметь вид:
Однако необходимо отметить, что после включения двигателя в нем происходят сложные электромагнитные процессы. В тех случаях, когда время разбега оказывается соизмеримым с временем электромагнитных процессов, механическая характеристика двигателя будет существенно отличаться от статической.
Одной из важнейших точек арактеристики, представляющей интерес при анализе работы и выборе двигателя, является точка, где момент, развиваемый двигателем, достигает наибольшего значения. Эта точка имеет координаты nкр, sкр , Mmax .
После дифференцирования и последующих преобразований выражение sкр будет иметь следующий вид: sкр = ± r'2/?r12 + xк2, где xк = x1 + x'2
получим выражение максимальногомомента
Мmax = 3U1ф2 / 2?0s (r1 ± ?r12 + xк2)
Момент, развиваемый двигателем, при любом скольжении пропорционален квадрату напряжения. Максимальный момент пропорционален квадрату напряжения и не зависит от сопротивления цепи ротора. Критическое скольжение пропорционально сопротивлению цепи ротора и не зависит от напряжения сети.
В практике обычно пользуются уравнением механической характеристики, с помощью которой можно произвести необходимые расчеты и построения, используя только каталожные данные.
Активное сопротивление обмотки статора r1 значительно меньше остальных сопротивлений статора и ротора, и им обычно пренебрегают. Упрощенное уравнение механической характеристики
M = 2Mmax/(s/sкр + sкр /s)
Следует отметить, что в зоне от М = 0 до М = 0,9Мmax механическая характеристика близка к прямой линии. Поэтому, например, при расчетах пусковых и регулировочных резисторов эту часть механической характеристики принимают за прямую линию, проходящую через точки M = 0, n = 0 и Mном, nном. Уравнение механической характеристики в этой части будет иметь вид
M = s Mном / sном
53. Электромагнитный момент асинхронного двигателя
Основной конечной величиной характеризующей электромеханическое преобразование является электромагнитный момент на валу. Он образуется в результате взаимодействия магнитного поля и тока, протекающего в обмотках статора или ротора, и может быть представлен как векторное произведение

где – zp число пар полюсов машины. Можно также представить его в виде – В выражениях физический смысл имеет только модуль вектора электромагнитного момента и его можно определить через проекции векторов сомножителей. Для произвольных векторовa и b модуль векторного произведения равен разности скалярных произведений проекций векторов на ортогональные оси координат, т.е. –
В выражениях физический смысл имеет только модуль вектора электромагнитного момента и его можно определить через проекции векторов сомножителей. Для произвольных векторовa и b модуль векторного произведения равен разности скалярных произведений проекций векторов на ортогональные оси координат, т.е. –

Поэтому любое из выражений позволяет найти модуль электромагнитного момента |m|=m, выразив входящие в него векторы через их проекции на координатные оси m-n. Например, электромагнитный момент определяется через произведение потокосцепления ротора на ток ротора в виде

Bottom of Form
54. Способы регулирования частоты вращения асинхронного двигателя
Из выражения для угловой частоты вращения АД:

следует, что существует три способа регулирования скорости:
- изменением числа пар полюсов p;
- изменением скольжения S;
- изменением частоты питающей сети  .
.
Для регулирования скорости изменением числа пар полюсов используются специальные многоскоростные АД с короткозамкнутым ротором. Изменение числа пар полюсов достигается за счет коммутации составных частей обмотки статора. Зная характер нагрузки, можно выбрать такую схему включения обмоток, которая обеспечит требуемые скорость и максимальный момент АД. Нижний предел диапазона регулирования составляет обычно 500 об/мин. Количество пар полюсов может быть равно только целому числу, поэтому данный способ регулирования скорости является ступенчатым. С энергетической точки зрения способ является экономичным, однако необходимость секционирования обмоток ухудшает массогабаритные показатели и повышает стоимость самого двигателя.
Р егулирование скорости изменением скольжения предполагает изменение жесткости механической характеристики АД при неизменной частоте
егулирование скорости изменением скольжения предполагает изменение жесткости механической характеристики АД при неизменной частоте . Для АД с короткозамкнутым ротором этот способ реализуется изменением величины напряжения, подводимого к двигателю.
. Для АД с короткозамкнутым ротором этот способ реализуется изменением величины напряжения, подводимого к двигателю.
На рисунке 1.1 приведены механические характеристики АД при регулировании напряжения, которые наглядно иллюстрируют особенности данного способа. Регулирование скорости осуществляется вниз от синхронной скорости  , при этом растет скольжение, существенно снижаются максимальный момент и перегрузочная способность АД. Кроме того, с ростом скольжения пропорционально растут потери в цепи ротора. Поэтому применение данного способа ограничивается электроприводом малой мощности с небольшим диапазоном регулирования. Частотное регулирование АД осуществляют изменением частоты напряжения подводимого к статору. Этот способ обеспечивает плавное регулирование
, при этом растет скольжение, существенно снижаются максимальный момент и перегрузочная способность АД. Кроме того, с ростом скольжения пропорционально растут потери в цепи ротора. Поэтому применение данного способа ограничивается электроприводом малой мощности с небольшим диапазоном регулирования. Частотное регулирование АД осуществляют изменением частоты напряжения подводимого к статору. Этот способ обеспечивает плавное регулирование
скорости в широком диапазоне с хорошими энергетическими характеристиками. Возможность регулирования темпа изменения частоты позволяет обеспечить оптимальные режимы частотного пуска и торможения АД.
Технически частотное регулирование осуществляют посредством полупроводниковых преобразователей частоты (ПЧ) — устройств, преобразующих однофазное или трехфазное сетевое напряжение с частотой 50 Гц в переменное трехфазное напряжение с регулируемой частотой и величиной напряжения.
studfiles.net
 Пусковые характеристики асинхронного мотора зависят от особенностей его конструкции, а именно от устройства ротора.
Пусковые характеристики асинхронного мотора зависят от особенностей его конструкции, а именно от устройства ротора.
Запуск асинхронного мотора сопровождается переходным процессом машины, связанным с переходом ротора из состояния покоя в состояние равномерного вращения, при котором момент мотора уравновешивает момент сил сопротивления на валу машины.
При пуске асинхронного мотора имеет место завышенное потребление электронной энергии из питающей сети, затрачиваемое не только лишь на преодоление приложенного к валу тормозного момента и покрытие утрат в самой асинхронном движке, да и на сообщение передвигающимся звеньям производственного агрегата определенной кинетической энергии. Потому при пуске асинхронный движок должен развить завышенный крутящий момент.
Для асинхронного мотора с фазным ротором исходный пусковой момент, соответственный скольжению sп= 1, находится в зависимости от активных сопротивлений регулируемых резисторов, введенных в цепь ротора.

Рис. 1. Запуск трехфазного асинхронного мотора с фазным ротором: а — графики зависимости крутящего момента мотора с фазным ротором от скольжения при разных активных сопротивлениях резисторов в цепи ротора, б — схема включения резисторов и замыкающих контактов ускорения в цепь ротора.
Так, при замкнутых контактах ускорения У1, У2, т. е. при пуске асинхронного мотора с замкнутыми накоротко контактными кольцами, исходный пусковой момент Мп1 = (0,5 -1,0) Мном, а исходный пусковой ток Iп = (4,5 — 7) Iном и поболее.
Малый исходный пусковой момент асинхронного электродвигателя с фазным ротором возможно окажется недостающим для приведения в действие производственного агрегата и следующего его ускорения, а значимый пусковой ток вызовет завышенный нагрев обмоток мотора, что ограничивает частоту его включений, а в маломощных сетях приводит к ненужному для работы других приемников временному снижению напряжения. Эти происшествия могут явиться предпосылкой, исключающей внедрение асинхронных движков с фазным ротором с огромным пусковым током для привода рабочих устройств.

Введение в цепь ротора мотора регулируемых резисторов, именуемых пусковыми, не только лишь понижает исходный пусковой ток, но сразу наращивает исходный пусковой момент, который может добиться наибольшего момента Mmax (рис. 1, а, кривая 3), если критичное скольжение мотора с фазным ротором
sкр = (R2′ + Rд‘) / (Х1 + Х2‘) = 1,
где Rд‘ — активное сопротивление резистора, находящегося в фазе обмотки ротора мотора, приведенное к фазе обмотки статора. Предстоящее повышение активного сопротивления пускового резистора нецелесообразно, потому что оно приводит к ослаблению исходного пускового момента и выходу точки наибольшего момента в область скольжения s > 1, что исключает возможность разгона ротора.
Нужное активное сопротивление резисторов для запуска мотора с фазным ротором определяют, исходя из требований запуска, который может быть легким, когда Мп = (0,1 — 0,4) Mном, обычным, если Мп — (0,5 — 0,75) Мном, и томным при Мп ≥ Мном.
Для поддержания довольно огромного крутящего момента движком с фазным ротором в процессе разгона производственного агрегата с целью сокращения продолжительности переходного процесса и понижения нагрева мотора нужно равномерно уменьшать активное сопротивление пусковых резисторов. Допустимое изменение момента в процессе разгона M(t) определяется электронными и механическими критериями, лимитирующими пиковый предел момента М > 0,85Ммах, момент переключения М2 > > Мс (рис. 2), также ускорение.

Рис. 2. Пусковые свойства трехфазного асинхронного мотора с фазным ротором
Переключение пусковых резисторов обеспечено последовательным включением контакторов ускорения Y1, Y2 соответственно в моменты времени t1, t2 отсчитываемые с момента запуска мотора, когда в процессе разгона крутящий момент М становится равным моменту переключения М2. Благодаря этому в протяжении всего запуска все пиковые моменты получаются схожими и все моменты переключения равны меж собой.
Так как крутящий момент и ток асинхронного мотора с фазным ротором взаимно связаны, то можно при разгоне ротора установить пиковый предел тока I1 = (1,5 — 2,5) Iном и ток переключения I2, который должен обеспечить момент переключения М2 > Мc.
Отключение асинхронных движков с фазным ротором от питающей сети всегда делают при цепи ротора, замкнутой накоротко, во избежание возникновения перенапряжений в фазах обмотки статора, которые могут превысить номинальное напряжение этих фаз в 3 — 4 раза, если цепь ротора в момент отключения мотора окажется разомкнутой.

elektrica.info
 В текущее время, на долю асинхронных движков приходится более 80% всех электродвигателей, выпускаемых индустрией. К ним относятся и трехфазные асинхронные движки.
В текущее время, на долю асинхронных движков приходится более 80% всех электродвигателей, выпускаемых индустрией. К ним относятся и трехфазные асинхронные движки.
Трехфазные асинхронные электродвигатели обширно употребляются в устройствах автоматики и телемеханики, бытовых и мед устройствах, устройствах звукозаписи и т.п.
Плюсы асинхронных электродвигателей
Обширное распространение трехфазных асинхронных движков разъясняется простотой их конструкции, надежностью в работе, неплохими эксплуатационными качествами, низкой ценой и простотой в обслуживании.
Устройство асинхронных электродвигателей с фазным ротором
 Основными частями хоть какого асинхронного мотора является недвижная часть – статор и крутящая часть, именуемая ротором.
Основными частями хоть какого асинхронного мотора является недвижная часть – статор и крутящая часть, именуемая ротором.
Статор трехфазного асинхронного мотора состоит из шихтованного магнитопровода, запрессованного в литую станину. На внутренней поверхности магнитопровода имеются пазы для укладки проводников обмотки. Эти проводники являются сторонами многовитковых мягеньких катушек, образующих три фазы обмотки статора. Геометрические оси катушек смещены в пространстве друг относительно друга на 120 градусов.
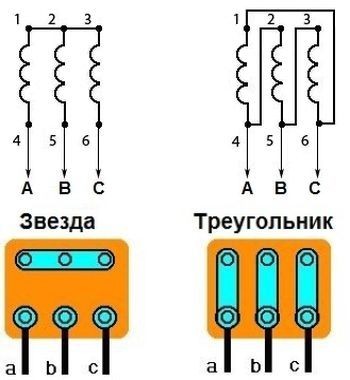
Фазы обмотки можно соединить по схеме »звезда» либо «треугольник» зависимо от напряжения сети. К примеру, если в паспорте мотора указаны напряжения 220/380 В, то при напряжении сети 380 В фазы соединяют «звездой». Если же напряжение сети 220 В, то обмотки соединяют в «треугольник». В обоих случаях фазное напряжение мотора равно 220 В.
Ротор трехфазного асинхронного мотора представляет собой цилиндр, набранный из штампованных листов электротехнической стали и насаженный на вал. Зависимо от типа обмотки роторы трехфазных асинхронных движков делятся на короткозамкнутые и фазные.

В асинхронных электродвигателях большей мощности и особых машинах малой мощности для улучшения пусковых и регулировочных параметров используются фазные роторы.В этих случаях на роторе укладывается трехфазная обмотка с геометрическими осями фазных катушек(1), сдвинутыми в пространстве друг относительно друга на 120 градусов.
Фазы обмотки соединяются звездой и концы их присоединяются к трем контактным кольцам (3), насаженным на вал (2) и электрически изолированным как от вала, так и друг от друга.При помощи щеток (4), находящихся в скользящем контакте с кольцами (3), имеется возможность включать в цепи фазных обмоток регулировочные реостаты (5).

Асинхронный движок с фазным ротором имеет наилучшие пусковые и регулировочные характеристики, но ему присущи огромные масса, размеры и цена, чем асинхронному движку с короткозамкнутым ротором.
Механизм работы асинхронных электродвигателей
Механизм работы асинхронной машины основан на использовании вращающегося магнитного поля. При подключении к сети трехфазной обмотки статора создается крутящееся магнитное поле, угловая скорость которого определяется частотой сети f и числом пар полюсов обмотки p, т. е. ω1=2πf/p
Пересекая проводники обмотки статора и ротора, это поле индуктирует в обмотках ЭДС (согласно закону электрической индукции). При замкнутой обмотке ротора ее ЭДС наводит в цепи ротора ток. В итоге взаимодействия тока с результирующим малнитным полем создается электрический момент. Если этот момент превосходит момент сопротивления на валу мотора, вал начинает крутиться и приводить в движение рабочий механизм. Обычно угловая скорость ротора ω2 не равна угловой скорости магнитного поля ω1, именуемой синхронной. Отсюда и заглавие мотора асинхронный, т. е. несинхронный.
Работа асинхронной машины характеризуется скольжением s, которое представляет собой относительную разность угловых скоростей поля ω1 и ротора ω2:s=(ω1-ω2)/ω1

Значение и символ скольжения, зависящие от угловой скорости ротора относительно магнитного поля, определяют режим работы асинхронной машины. Так, в режиме безупречного холостого хода ротор и магнитное поле крутятся с схожей частотой в одном направлении, скольжение s=0, ротор неподвижен относительно вращающегося магнитного пол, ЭДС в его обмотке не индуктируется, ток ротора и электрический момент машины равны нулю. При пуске ротор в 1-ый момент времени неподвижен: ω2=0, s=1. В общем случае скольжение в двигательном режиме меняется от s=1 при пуске до s=0 в режиме безупречного холостого хода.
При вращении ротора со скоростью ω2>ω1 в направлении вращения магнитного поля скольжение становится отрицательным. Машина перебегает в генераторный режим и развивает тормозной момент. При вращении ротора в направлении, обратном направлению вращения магнитного поли (s>1), асинхронная машина перебегает в режим противовключения и также развивает тормозной момент. Таким макаром, зависимо от скольжения различают двигательный (s=1÷0), генераторный (s=0÷-∞) режимы и режим противовключення (s=1÷+∞). Режимы генераторный и противовключения употребляют для торможения асинхронных движков.
elektrica.info