





На ротор и полюсы статора действуют электромагнитные вращающие моменты, одинаковые по величине и направленные в противоположные стороны. Мощность, необходимая для вращения статорных полюсов с синхронной частотой,
 ,
,
где  - угловая скорость.
- угловая скорость.
Механическая мощность, развиваемая ротором,

где  - угловая скорость ротора.
- угловая скорость ротора.
Разность мощностей

где РЭ2 - электрические потери в роторной обмотке; m2 - число фаз обмотки ротора; R2 - активное сопротивление обмотки ротора; I2 - ток ротора.

откуда 
Вращающий момент:
 (12.4).
(12.4).
где КТ - коэффициент трансформации двигателя с заторможенным ротором,
U1 - напряжение сети,
 - константа.
- константа.
На рис. 12.5 изображена зависимость электромагнитного момента от скольжения в виде сплошной линии.
Рис. 12.5
Пусть исполнительный механизм, приводимый во вращение данным двигателем, создает противодействующий тормозной момент М2. На рис.12.5 имеются две точки, для которых справедливо равенство Мэм = М2;это точки а и в. В точке а двигатель работает устойчиво. Если двигатель под влиянием какой-либо причины уменьшит частоту вращения, то скольжение его возрастет, вместе с ним возрастет вращающий момент. Благодаря этому частота вращения двигателя повысится, и вновь восстановится равновесие Мэм = М2;. В точке в работа двигателя не может быть устойчива: случайное отклонение частоты вращения приведет либо к остановке двигателя, либо к переходу его в точку а. Следовательно, вся восходящая ветвь характеристики является областью устойчивой работы двигателя, а вся нисходящая часть - областью неустойчивой работы. Точка б, соответствующая максимальному моменту, разделяет области устойчивой и неустойчивой работы. Максимальному значению вращающего момента соответствует критическое скольжение Sk. Скольжению S = 1 соответствует пусковой момент. Если величина противодействующего тормозного момента М2больше пускового МП, двигатель при включении не запустится, останется неподвижным.
Механической характеристикой асинхронного двигателя называется зависимость частоты вращения двигателя от момента на валу n2 = f (M2). Механическую характеристику получают при условии U1 - const, f1 - const. Механическая характеристика двигателя является зависимостью вращающего момента от скольжения, построенной в другом масштабе. На рис. 12.6 изображена типичная механическая характеристика асинхронного двигателя.
С увеличением нагрузки величина момента на валу возрастает до некоторого максимального значения, а частота вращения уменьшается. Как правило, у асинхронного двигателя пусковой момент меньше максимального. Это объясняется тем, что в пусковом режиме, когда n2 = 0, а S = 1 асинхронный двигатель находится в режиме, аналогичном короткому замыканию в трансформаторе. Магнитное поле ротора направлено встречно магнитному полю статора.
Рис. 12.6
Результирующий, или основной, магнитный поток в воздушном зазоре машины в пусковом режиме, а также ЭДС в статоре и роторе Е1 и Е2 значительно уменьшаются. Это приводит к уменьшению пускового момента двигателя и к резкому возрастанию пускового тока.
12.4. Регулирование частоты вращения асинхронных двигателей.Реверсирование асинхронного двигателя
Из формулы (12.2) получим
 . (12.11)
. (12.11)
Из формулы (12.11) видно, что частоту вращения асинхронного двигателя можно менять тремя способами:
1. изменением частоты питающего напряжения;
2. изменением числа полюсов двигателя. Для этого в пазы статора закладывают обмотку, которую можно переключать на различное число полюсов;
3. изменением скольжения. Этот способ можно применить в асинхронных двигателях с фазным ротором. Для этого в цепь ротора включают регулировочный реостат. Увеличение активного сопротивления цепи ротора приводит к увеличению скольжения от Sa к Sг (см. рис. 12.5), а, следовательно, и к уменьшению частоты вращения двигателя.
Асинхронные двигатели имеют простую конструкцию и надежны в эксплуатации. Недостатком асинхронных двигателей является трудность регулирования их частоты вращения. Чтобы реверсировать трехфазный асинхронный двигатель (изменить направление вращения двигателя на противоположное), необходимо поменять местами две фазы, то есть поменять местами два любых линейных провода, подходящих к обмотке статора двигателя.
poznayka.org
Принцип действия асинхронного двигателя, как указывалось, основан на взаимодействии вращающегося поля и тока, индуктированного этим полем в обмотке ротора.
В результате взаимодействия магнитного потока Ф с током I2, протекающим в проводниках обмотки ротора, возникают электромагнитные силы, приводящие ротор во вращение. Поэтому вращающий момент, создаваемый на валу двигателя, зависит от величины тока ротора I2 и от магнитного потока Ф. Кроме того, на величину вращающего момента асинхронного двигателя влияет сдвиг фаз Ψ2 между током I2 и ЭДС ротора.
Для уяснения влияния cosΨ2 рассмотрим картину электромагнитных сил, действующих на проводники ротора. Рассмотрим сначала случай, когда индуктивность обмотки ротора мала и поэтому сдвигом фаз между током и ЭДС можно пренебречь. Вращающееся магнитное поле статора здесь заменено полем полюсов N и S, вращающимся, предположим, по направлению часовой стрелки. Пользуясь правилом «правой руки», I определяем направление ЭДС и токов в обмотке ротора. Токи ротора, взаимодействуя с вращающимся магнитным полем, создают момент вращения. Направления сил, действующих на проводники с током, определяются по правилу «левой руки». Как видно из чертежа ротор под действием сил будет вращаться в ту же сторону, что и само вращающееся поле, т.е. по часовой стрелке.

Рис.15 Вращающий момент асинхронного двигателя
 Регулирование напряжения на тяговых двигателях
Регулирование напряжения на тяговых двигателях
Рис. 15 Тиристорно-импульсный регулятор
Тиристорно-импульсный регулятор (Рис.15) состоит из фильтра Lф-Сф, тиристорно-импульсного прерывателя(ТИП), сглаживающего реактора (L) и обратного диода (V), шунтирующего последовательно включенного сглаживающего реактора (L) и обмотки двигателя.
Тиристорно-импульсный прерыватель представляет собой ключ, имеющий два устойчивых состояния: замкнутое и разомкнутое. Он переключается с частотой f.
В интервале каждого периода T = l / f ключ замкнут в течение времени t и разомкнут в оставшуюся часть периода T - t. Соответственно тяговая машина часть периода, определяемого коэффициентом заполнения l = t / T , подключена к источнику напряжения U, а оставшуюся часть периода ( T - t) / T = l - l отключена от него.
Пренебрегая пульсациями напряжения на конденсаторе Cф, которые малы и обычно составляют менее 0,1U, можно считать, что к цепи тяговой машины прикладываются прямоугольные импульсы напряжения амплитудой U и длительностью t. Среднее значение этого напряжения за период
U ср. дв = Ut / T = Ul.
С помощью тиристорно-импульсного регулятора путем изменения l от lmin
до единицы среднее значение напряжения U ср. дв, прикладываемого к цепи тяговой машины, можно регулировать в широких пределах от U ср. дв. min до U ср. дв. max = U.
Энергия от внешнего источника питания (контактный рельс) подводится к цепи тяговой машины импульсами длительностью t и частотой f . Однако, преобразование электрической энергии в механическую в тяговой машине происходит непрерывно независимо от состоянии прерывателя, что обеспечивается использованием в рассматриваемой схеме обратного диода V и наличием накопительных элементов: сглаживающего реактора L и обмоток тяговой машины.
За время t энергия, поступающая от внешнего источника напряжения U, потребляется тяговой машиной не полностью, частично запасаясь в накопительных элементах для дальнейшего использования тяговой машиной в интервале T - t периода, когда приток энергии от внешнего источника питания отсутствует.
Вследствие этого тяговая машина получает питание непрерывно: в интервале l - от внешнего источника напряжения U, а оставшуюся часть периода l - l - благодаря энергии, запасенной в накопительных элементах. Поэтому, несмотря на импульсный характер питания тяговой машины от внешнего источника питания, ток iя в ее цепи будет непрерывным. Одну часть l периода ток iя нарастает, другую l - l уменьшается, замыкаясь под действием э.д.с. е¢L, е¢¢L и е¢¢¢L самоиндукции, наводимых в реакторе L и обмотках тяговой машины, по цепи обратного диода V, т.е. ток пульсирует на уровне среднего значения I я ср. Таким образом, при размыкании импульсного регулятора ток в цепи тяговой машины не разрывается, а происходит изменение контура для его замыкания. Это исключает появление перенапряжений на регуляторе, несмотря на то, что обмотки тяговой машины и реактор обладают большой индуктивностью.
При работе импульсного прерывателя нельзя допускать также прерывания тока в контактной сети, которая обладает значительной индуктивностью. Непрерывность тока в контактной сети при импульсном характере нагрузки обеспечивает Г – образным фильтром Lф - Cф. Независимо от состояния прерывателя ток в контактной сети имеет контур для замыкания: по цепи тягового двигателя ( i ) или по цепи фильтрового конденсата (i¢). В интервале периода l - l, несмотря на то, что тяговая машина отключена от контактной сети, происходит потребление электрической энергии от источника питания, которая не расходуется, а запасается в фильтровом конденсаторе.
В интервале периода l в цепь тяговой машины поступает энергия как от источника питания, так и от фильтрового конденсатора, которая без учета потерь в элементах схемы равна энергии, поступившей от источника за весь период. Таким образом, благодаря накоплению энергии в конденсаторе Cф в интервале период l - l
обеспечивается непрерывность тока в контактной сети. На обмотки асинхронной машины подаются прямоугольные импульсные напряжения. В течении каждого периода регулирования изменяется ширина и полярность импульсов напряжения, подводимых к каждой фазе асинхронной машины. В результате формы кривых фазового тока получаются близкими к синусоидальным.
Содержание высших гармоник в кривых фазового тока зависит от частоты импульсной модуляции, разности между напряжением на нагрузке и напряжением контактной сети режима работы привода. Для подавления высших гармоник на входе инвертора установлен Lф - Cф - фильтр. Поэтому из цепи источника питания потребляется практически постоянный ток.
В режиме тяги регулирование мощности привода производится следующим образом: при пуске момент на валу тяговых машин поддерживается постоянным, мощность, развиваемая тяговым приводом, постепенно увеличивается до максимального значения.
Затем мощность привода поддерживается на максимальном уровне и уменьшается магнитный поток тяговых машин.
В конце регулирования с ростом частоты вращения роторов тяговых машин мощность, реализуемая тяговым приводом, постепенно уменьшается. Переход из режима тяги в режим электрического торможения осуществляется изменением частоты переключений инвертора в сторону уменьшения, при этом асинхронные машины переходят в генераторный режим, а инвертор выполняет функции управляемого выпрямителя.
Для согласования мощности асинхронных машин в режиме торможения с установленной мощностью инвертора в цепь обмоток асинхронных машин включен тормозной резистор R, на котором рассеивается часть тормозной энергии в диапазоне высоких скоростей торможения, а также при отсутствии в сети потребителей рекуперируемой энергии. Защита от юза и боксования на вагонах «Русич» осуществляется системой «Витязь», для чего в систему управления пневматическими тормозами входят блоки управления противоюзной защиты. При нарушении условий сцепления процессов пуска и торможения, блоки своевременно снижают вращающий момент боксования и давление вТЦ, что приводит к устранению юза без существенных потерь силы тяги и тормозной силы.
Эффект Холла
Эффектом Холла (рис.16) называется возникновение поперечного электрического поля и разности потенциалов в проводнике или полупроводнике, по которым проходит электрический ток, при помещении их в магнитное поле, перпендикулярное к направлению тока.
Если в магнитное поле с индукцией В поместить проводник или электронный полупроводник, по которому течет электрический ток плотности j, то на электроны, движущиеся со скоростью v в магнитном поле, действует сила Лоренца F, отклоняющая их в определенную сторону.
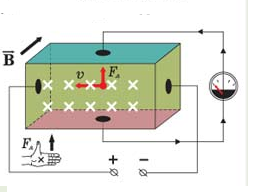

Рис. 16 Эффект Холла.
В магнитном поле с индукцией В находится полупроводниковая пластинка, через которую протекает электрический ток. Действие эффекта Холла заключается в том, что на боковых сторонах пластинки перпендикулярно направлению тока возникает разность потенциалов - напряжение Холла или ЭДС Холла UH. Максимальное значение U принимает при совпадении вектора В с нормалью к пластинке, что нашло широкое применение в разработке различных датчиков.
megaobuchalka.ru
Cтраница 2
Вращающий момент асинхронного двигателя пропорционален квадрату напряжения. Незначительное падение напряжения на клеммах двигателя в момент пуска приводит к резкому снижению пускового момента. При маломощных сетях возможны случаи, когда холодильный агрегат даже при полной разгрузке не может быть пущен в ход. [16]
Вращающий момент асинхронного двигателя, или так называемый асинхронный момент, возникает при скольжении ротора относительно вращающегося магнитного поля статора. [17]
Максимальный вращающий момент асинхронного двигателя пропорционален квадрату напряжения на его зажимах. Мг - 7И2, причем Мг пропорционален квадрату напряжения прямой последовательности, а М2 - квадрату напряжения обратной последовательности. Так как напряжение прямой последовательности близко к номинальному, то MI - С. [18]
Минимальный вращающий момент асинхронного двигателя - наименьший момент, развиваемый асинхронным двигателем с короткозамкнутым ротором в процессе разгона от неподвижного состояния до частоты вращения, соответствующей максимальному моменту при номинальных напряжении и частоте. [19]
Почему вращающий момент асинхронного двигателя растет относительно быстрее, чем возрастает мощность на валу. [20]
Максимальный вращающий момент асинхронного двигателя пропорционален квадрату магнитного потока ( а значит, и квадрату напряжения) и обратно пропорционален индуктивности рассеяния обмотки ротора. [21]
Тогда вращающий момент асинхронных двигателей не будет меньше 0 49 УИН, этого в большинстве Случаев достаточно для привода производственных механизмов. [22]
Зависимость вращающего момента асинхронного двигателя от скольжения [ Mf ( s) J называется его естественной механической характеристикой. [23]
Чему равен вращающий момент асинхронного двигателя, если скольжение ротора равно нулю. [24]
Следовательно, вращающий момент асинхронного двигателя [ см. ( 213а) ] пропорционален квадрату магнитного потока. [25]
Чему равен вращающий момент асинхронного двигателя при оптимальном скольжении. [26]
Как зависит вращающий момент асинхронного двигателя от сдвига фаз между ЭДС и током в роторе. [27]
Как изменяется вращающий момент асинхронного двигателя во время пуска. [28]
Как зависит вращающий момент асинхронного двигателя от тока в роторе. [29]
Как зависит вращающий момент асинхронного двигателя от скольжения. [30]
Страницы: 1 2 3 4
www.ngpedia.ru
Вращающий момент асинхронного электродвигателя создается, как уже указывалось, за счет взаимодействия между вращающимся магнитным потоком статора и токами в обмотке ротора. Вполне понятно, что при отсутствии тока в обмотке ротора никакого момента создаваться не будет. Скольжение характеризует скорость вращения ротора относительно магнитного поля статора. От величины этой скорости зависит ток в роторе, а от тока—величина вращающего момента электродвигателя, который может быть вычислен по формуле (6). Но выражение (6), несмотря на свою простоту, не дает возможности выяснить влияние различных факторов на величину вращающего момента. Поэтому в курсе электротехники часто используют другое выражение:

где с — постоянная величина, зависящая от конструкции электродвигателя;
?1 —угловая скорость вращающегося магнитного поля.
Выражение (90) показывает, что вращающий момент пропорционален квадрату напряжения сети, в связи с чем даже небольшое уменьшение напряжения в питающей сети приводит к резкому снижению вращающего момента, что отрицательно сказывается на работе электродвигателя.
Кроме того, выражение (90) учитывает зависимость величины вращающего момента от активных и индуктивных сопротивлений электродвигателя, а также от скольжения.
Если обозначить (х1 + сх2) через х и выполнить несложные преобразования в формуле (90), то получим

Величинами r1 s и x2 s2 можно пренебречь, ввиду их малости. Тогда, до некоторого предела

Таким образом доказано, что с увеличением скольжения возрастает и момент электродвигателя.
Более точный анализ выражений (90) и (91) показывает, что момент с увеличением скольжения возрастает лишь до некоторого критического значения Мкрит (так называемый опрокидывающий момент), после чего начинается резкое его снижение.
Величина критического скольжения, при которой имеет место опрокидывающий момент,

Подставляя это выражение в уравнение (91), получим

В последних выражениях знак плюс относится к работе электродвигателя в режимах двигательном и торможения противовключением, а знак минус — к работе в генераторном режиме с отдачей энергии в сеть. Очевидно, что критический момент в двигательном режиме меньше, чем в генераторном.

Зависимость М = f (s), построенная по уравнению (91), приведена на рис. 42, который показывает, что при трогании электродвигателя с места, когда скольжение s=1, начальный пусковой момент асинхронного электродвигателя невелик, что является его основным недостатком.
Выражения (93) и (94) показывают, что при изменении активного сопротивления роторной цепи величина опрокидывающего момента Мкрит не изменяется, меняется при этом лишь величина критического скольжения sкрит. Поэтому при различных активных сопротивлениях роторной цепи кривые М = f(s) имеют различный характер. Эти кривые показывают, что пусковой момент асинхронного электродвигателя с фазным ротором можно искусственным образом изменять, вводя различные активные сопротивления в

его роторную цепь. Таким же образом можно регулировать скорость электродвигателя, так как при изменении активного сопротивления роторной цепи меняется величина скольжения (рис. 43), а от скольжения, как показывает выражение (82), зависит число оборотов асинхронного электродвигателя.
vdvizhke.ru
Cтраница 1
Вращающий момент асинхронного двигателя при заданном сколь - / жении прямо пропорционален квадрату напряжения. В связи с этим понижение напряжения в электрической сети, питающей двигатель, отрицательно сказывается на его работе. [1]
Вращающий момент асинхронного двигателя, или так называемый асинхронный момент, возникает при скольжении ротора относительно вращающегося магнитного поля статора. [2]
Вращающий момент асинхронного двигателя пропорционален квадрату напряжения, подведенного к обмотке статора. [3]
Вращающий момент асинхронного двигателя существенным образом зависит от напряжения питания обмотки статора. [4]
Вращающий момент асинхронного двигателя при заданном скольжении прямо пропорционален квадрату напряжения. В связи с этим понижение напряжения в электрической сети, питающей двигатель, отрицательно сказывается на его работе. Резкое снижение пускового и критического моментов затрудняет, а иногда делает невозможным пуск тяжелых производственных машин и снижает величину допускаемых кратковременных перегрузок двигателя. [5]
Вращающий момент асинхронного двигателя создается при взаимодействии вращающегося магнитного поля статора с токами в проводниках обмотки ротора. Однако в создании вращающего момента участвует только активная мощность, потребляемая машиной из сети. [6]
Вращающий момент асинхронного двигателя создается в результате взаимодействия вращающегося магнитного поля статора с токами в проводниках обмотки ротора. Однако в процессе преобразования энергии ( создания вращающего момента) участвует только активная мощность, потребляемая машиной из сети. [7]
Вращающий момент асинхронного двигателя пропорционален квадрату напряже - ния, поэтому двигатель весьма чувствителен к изменению напряжения в сети. Вращающий момент зависит от величины скольжения, а скольжение, в свою очередь, зависит от активного сопротивления цепи обмотки ротора. [8]
Вращающий момент асинхронного двигателя пропорционален квадрату поданного на статор напряжения. Отчасти этим объясняется жесткое нормирование напряжения сети, питающей асинхронные электродвигатели. [9]
Вращающий момент асинхронного двигателя зависит от напряжения сети. [10]
Вращающий момент асинхронного двигателя пропорционален квадрату питающего напряжения, поэтому при снижении напряжения сети момент нагрузки может стать больше максимального момента двигателя, двигатель остановится, наступит режим короткого замыкания. [12]
Вращающий момент асинхронного двигателя создается благодаря взаимодействию вращающегося магнитного поля статора с токами в обмотке ротора. Однако в создании вращающего момента участвует только активная мощность, потребляемая машиной из сети. [13]
Вращающий момент асинхронного двигателя зависит от напряжения питающей сети. При изменении напряжения пропорционально изменяется амплитуда магнитного потока Ф, и ток в роторе / 2 при том же скольжении. Так как момент двигателя пропорционален произведению Фт 2, то отсюда следует, что вращающий момент пропорционален квадрату напряжения сети. [14]
Вращающий момент асинхронного двигателя пропорционален квадрату напряже - ния, поэтому двигатель весьма чувствителен к изменению напряжения в сети. Вращающий момент зависит от величины скольжения, а скольжение, в свою очередь, зависит от активного сопротивления цепи обмотки ротора. [15]
Страницы: 1 2 3 4
www.ngpedia.ru
 Вращающий момент асинхронного двигателя. Вывод формулы. Номинальный, критический и пусковой моменты.
Вращающий момент асинхронного двигателя. Вывод формулы. Номинальный, критический и пусковой моменты. просмотров - 841
Для каждого асинхронного двигателя может быть определен номинальный режим, т. е. режим длительной работы, при котором двигатель не перегревается сверх установленной температуры. Момент Мном, соответствующий номинальному режиму, принято называть. номинальным моментом. Соответствующее ему номинальное скольжение составляет для асинхронных двигателей средней мощности sH0M = 0,02...0,06, ᴛ.ᴇ. номинальная скорость nиом находится в пределах
nном=n0(1 - s0)= (0,94...0,98) п0.
Отношение максимального момента к номинальному км = = Mmах/Mном принято называть перегрузочной способностью асинхронного двигателя. Обычно кт = 1,8.. .2,5.
При пуске в ход, т. е. при трогании с места и при разгоне, асинхронный двигатель находится в условиях, существенно отличающихся от условий нормальной работы. Момент, развиваемый двигателем, должен превышать момент сопротивления нагрузки, иначе двигатель не сможет разгоняться. Τᴀᴋᴎᴍ ᴏϬᴩᴀᴈᴏᴍ, с точки зрения пуска двигателя важную роль играет его пусковой момент.
Отношение пускового момента Мп развиваемого двигателем в неподвижном состоянии, т. е. при n = 0, к номинальному моменту kп= Мп/Мном принято называть кратностью пускового момента.
Максимальный момент Мтах принято называть критическим моментом асинхронной машины. Работа машины с моментом, превышающим номинальный, возможна лишь кратковременно, в противном случае срок службы машины сокращается из-за ее перегрева.
В результате взаимодействия вращающегося магнитного потока с токами, индуктированными им в проводниках роторной обмотки, возникают силы, действующие на эти проводники в тангенциальном направлении. Найдем значение момента͵ создаваемого этими силами на валу машины.
Электромагнитная мощность, передаваемая ротору вращающимся магнитным полем, ровна:
где Мэм - электромагнитный момент действующий на ротор.
В соответствии со схемой замещения одной фазы машины:
Из этих выражений найдем:
Учитывая действующий ток ротора, ЭДС, индуктивное сопротивление получим:
Введем постоянную и пренебрегая моментом трения, представим выражение момента на валу в виде:
В случае если магнитный поток Ф выражен в веберах, ток I2— в амперах, то вращающий момент получится в ньютон-метрах (Нм).
Вращающий момент машины зависит от изменяющихся при нагрузке ф, I2и , но его можно представить в виде функции однойпеременной. В качестве такой переменной для асинхронного двигателя наиболее удобно выбрать скольжениеs.
| |
Согласно ранее изученным формулам:
Тогда
Полагая, что частота сети неизменна введем
Получим следующее выражение для вращающего момента:
42. Энергетическая диаграмма АД.В электрической машине часть энергии теряется в виде тепла в различных частях - потери в обмотках, в стали, механические потери.
На диаграмме: Р1 - мощность, подводимая из сети. Основная часть её за вычетом потерь в статоре, передаётся электромагнитным путём на ротор через зазор; Рэм принято называть электромагнитной мощностью.
Потери в статоре складываются из потерь в обмотке и в стали:
Рис. 42. Энергетическая диаграмма АД.
рс1 и рс2. рс1 теряется на вихревые токи и перемагничивание сердечника. Потери в стали имеются и в сердечнике ротора, но они невелики и их можно не учитывать, т.к. n0 во много раз больше скорости магнитного потока относительно ротора n0 - n, если n соответствует устойчивой части естественной механической характеристики.
Механическая мощность, развиваемая на валу ротора, меньше Рэм на значение роб2потерь в обмотке ротораРмх = Рэм - роб2 Мощность на валу Р2 = Рмх - рмх , где рмх - мощность механических потерь, равная сумме потерь на трение в подшипниках, на трение о воздух и трение щеток о кольца.
Электромагнитная и механическая Р равныРэм = ω0М, Рмх = ωМ, где ω0 и ω - скорости синхронная и ротора, М - момент, развиваемый двигателей, ᴛ.ᴇ. момент, с которым вращающееся поле действует на ротор.
Добавочные потери обусловлены зубчатостью ротора и статора, вихревыми токами в различных узлах и другими причинами. При полной нагрузке потери Рд принимаются равными 0,5% его номинальной мощности.
К.п.д. двигателя: h = P2/P1 = [P1 - (роб + рс + рмх + рд )] / Р1 .
Т.к. общие потери зависят от нагрузки, то и КПД является функцией нагрузки. Машина конструируется так, чтобы максимум ее коэффициента полезного действия h имел место при нагрузке, несколько меньше номинальной. Для большинства двигателей к.п.д. равен 80-90%, а для мощных двигателей 90-96%.
43. Устройство синхронного двигателя. Схема замещения, уравнения энергетического состояния фазы обмотки статора, векторная диаграмма синхронного дв.Основными частями статора являются неподвижный пакет магнитопровода и трехфазная обмотка. Пакет магнитопровода изготовлен в виде полого цилиндра, набранного, так же как и магнитопровод трансформатора, из тонких листов электротехнической стали. Листы имеют форму колец с пазами, симметрично расположенными вдоль внутренней окружности. В пазы пакета статора уложены стороны многовитковых мягких катушек, образующих три фазы обмотки. Пакет статора с обмоткой запрессован в алюминиевый или чугунный корпус-оболочку, неподвижно закрепляемый при установке машины на фундаментной плите. С корпусом прочно соединены два боковых литых щита со сквозными центральными отверстиями для подшипников, в которых вращается вал ротора.
Начала и концы фаз обмотки статора присоединены к зажимам, расположенным в коробке выводов, укрепленной на корпусе. Большинство машин имеет коробку выводов с шестью зажимами, что позволяет соединять фазы обмотки треугольником или звездой.
Применяются два типа роторов синхронных машин — неявнопо-люсный, или с неявно выраженными полюсами, и ротор явнополюс-ный, или с явно выраженными полюсами. В первом случае сердечник ротора представляет массивное цилиндрическое тело из стали (бочка ротора), вдоль его поверхности выфрезерованы пазы, в которых закладывается обмотка возбуждения. Пазы и обмотка возбуждения размещаются так, чтобы получить по возможности синусоидальное распределение индукции в зазоре между сердечниками ротора и статора. Общий вид неявнополюсного ротора показан на рис.
Явнополюсный ротор состоит из массивного стального колеса, посаженного на вал. К его ободу по внешней поверхности крепятся стальные сердечники полюсов. Последние, а иногда и обод выполняются из листовой стали. Для малых машин и при не слишком большом числе полюсов вместо колеса на вал насаживается стальная втулка, к которой крепятся полюса. Обмотка возбуждения в виде катушек размещается на сердечниках полюсов. Такая конструкция ротора позволяет разместить на нем большое число полюсов, что крайне важно для машин с небольшой скоростью вращения.
44. Регулирование реактивной мощности синхронного двигателя осуществляется изменением тока возбуждения Iв
1) Номинальный режим Iв= Iв ном. cosφ=1.
2) Iв< Iв ном cos φ<1
реактивная составляющая увеличивается, носит индуктивный характер-режим работы АСД
3) Iв> Iв ном cos φ<1
ток якоря увеличивается ,Емкостной характер
При этом способе реактивная мощность отдается в сеть ,что является большим плюсом.
Изменяя ток возбуждения меняем ток якоря.
45. Регулирование активной мощности синхронного двигателя осуществляется изменением угла согласования. При увеличении нагрузки угол увеличивается, при уменьшении- уменьшается. Угол рассогласования определяет перегрузочную способность двигателя.
Отношение максимального момента к номинальному:
46. Устройство, принцип действия двигателя постоянного тока. Способы возбуждения. ЭДС обмотки якоря и электромагнитный моментУстройство и принцип действия двигателя постоянного тока Двигатель постоянного тока состоит из неподвижной части -статора и вращающейся части - якоря, разделенных воздушным зазором. К внутренней поверхности статора крепятся главные в добавочные полюсы. Главные полюсы с обмотками возбуждения служат для создания в машине основного магнитного потока Ф, а добавочные - для уменьшение искрения.
Якорь состоит из вала, сердечника, обмотки и коллектора. Коллектор содержит изолированные друг от друга медные пластины, которые соединяются с секциями обмотки якоря. На коллектор накладываются неподвижные щётки; соединяющие обмотку якоря с внешней электрической цепью. В результата взаимодействия тока якоря Iя И магнитного потока Ф создается вращающий момент, М=СмФIя , где См- постоянная момента͵ зависящая от конструктивных данных машины. Вращающий момент М, двигателя уравновешивается моментом сопротивления Мс рабочей машины. При вращении якоря с частотой n его обмотка пересекает магнитный поток Ф и в ней, согласно закону электромагнитной индукции, наводится противо-ЭДС E =СеФп , где Се _ конструктивная постоянная.
Напряжение на эажимаx якоря U равно сумме ЭДС и падения напряжения на сопротивлении якорной цепи U=E +RяIя=CеФn, откуда ток якоря Iя=(U-CеФn)/Rя, а частота вращения n=(U- RяIя)/ CеФ/
Учитывая зависимость отспособа питания обмотки возбуждения генераторы постоянного тока бывают:
Рис. 50. Возбуждение генератора: а - независимое, б - параллельное, в - последовательное, г - смешанное.
При независимом возбуждении ОВ питается от постороннего источника. Применяется в случаях, когда крайне важно в широких пределах регулировать ток возбуждения Iв и напряжение U на зажимах машины. Ток якоря равен току нагрузки Iя = Iн (рис. 50, а)
Генераторы с самовозбуждением имеют ОВ, питаемые от самого генератора.
При включении ОВ параллельно с обмоткой якоря имеем генератор с параллельным возбуждением (рис. 50, б), у которого Iя = Iн + Iв. У мощных машин нормального исполнения Iв обычно составляет 1-3%, а у малых машин - до нескольких десятков % от тока якоря. У генератора с последовательным возбуждением (рис. 50, в) ОВП включён последовательно с якорем, ᴛ.ᴇ.
Iя = Iн = Iв.
Генераторы со смешанным возбуждением имеют две обмотки возбуждения, ОВ включёна параллельно якорю, а другая ОВП - последователь но (рис. 50, г). Основной обычно является ОВ. ОВП подмагничивает машину при увеличении тока нагрузки, чем компенсируется падение напряжения U в обмотке якоря и размагничивающее влияние реакции якоря.
47. Нагрузочный режим двигателя постоянного тока с параллельным возбуждением. Механическая характеристика.Подадим на зажимы неподвижного якоря напряжение. Напряжение вызовет ток в цепи якоря. При этом возникает электромагнитным момент. Этот момент начнёт вращать якорь, совершая механическую работу. Машина начнет работать в режиме электродвигателя. Чтобы преодолеть сопротивление механической нагрузки на валу, электродвигателя должен потреблять энергию из внешнего источника.
48. Способы пуска двигателя постоянного тока.Нормальная машина постоянного тока имеет цилиндрический ротор с обмоткой, называемый якорем, который вращается в неподвижном магнитном поле. В витках 1-3 и 2-4 обмотки якоря индуктируются переменные ЭДС и для получения постоянного направления тока i в сопротивлении нагрузки r, применяется коллектор К, состоящий из медных изолированных друг от друга пластин, образующих цилиндр, по которому скользят щетки а - B. Наличие коллектора, к пластинам которого присоединяются начала и концы витков обмотки якоря, является отличительной особенностью м. п. т. В положении на рисунке стороны 1-3 витка пересекают магнитные линии перпендикулярно, в связи с этим между щетками будет Емах.
Рис. 47. Схема генератора постоянного тока с двумя витками и четырьмя коллекторными пластинами.
oplib.ru
Cтраница 3
По кривой вращающего момента асинхронного двигателя можно судить о том, как изменяется число оборотов двигателя с изменением нагрузки. Для этого достаточно по горизонтальной оси ( рис. 295) наряду со скольжением отложить и число оборотов ротора, обратно пропорциональное скольжению. [31]
Для получения вращающего момента асинхронного двигателя, воздействующего на его ротор, необходимо, чтобы Фрез имел составляющую, вращающуюся в пространстве в каком-либо определенном направлении. [32]
Для получения вращающего момента асинхронного двигателя, воздействующего на его ротор, необходимо, чтобы Фрез имел составляющую, вращающуюся в пространстве. [34]
От чего зависит вращающий момент асинхронного двигателя. [35]
Таким образом, вращающий момент асинхронного двигателя определяется следующим выражением: М сФт / 2созг) 2, где с - конструктивная постоянная машина, зависящая от числа ее полюсов и фаз, числа витков обмотки статора и конструктивного выполнения обмотки ротора. [36]
От чего зависит вращающий момент асинхронного двигателя. [37]
Таким образом, вращающий момент асинхронного двигателя определяется следующим выражением. [38]
От чего зависит вращающий момент асинхронного двигателя. [39]
Таким образом, вращающий момент асинхронного двигателя пропорционален величине вращающегося магнитного потока, пронизывающего ротор машины, и произведению / 2coscp2, представляющему собой активную составляющую тока ротора. [40]
Доказать, что вращающий момент асинхронного двигателя при данном скольжении пропорционален квадрату приложенного к статору напряжения. [41]
Таким образом, вращающий момент асинхронного двигателя при данном скольжении пропорционален квадрату подведенного к статору напряжения. [43]
Как отмечалось, максимальный вращающий момент асинхронных двигателей пропорционален квадрату напряжения. UH, момент М макс будет равен всего 0 72 Ммакс и может оказаться меньше номинального. В этом случае работа двигателя с номинальной нагрузкой уже невозможна. [44]
Выходное напряжение фазового дискриминатора ( вращающий момент асинхронного двигателя) примерно пропорционально огибающей первой составляющей. Вторая ( квадратурная) составляющая на выходе фазового дискриминатора дает нуль. Поэтому рассмотрим только огибающую первой, называемой также рабочей, составляющей выходного напряжения контура. [45]
Страницы: 1 2 3 4
www.ngpedia.ru










