





При недозагрузке электродвигателя потребляемая им активная мощность уменьшается пропорционально нагрузке. В то же время реактивная мощность изменяется меньше. Поэтому чем меньше нагрузка двигателя, тем с меньшим коэффициентом мощности он работает.
Так, например, асинхронный двигатель в 400 кВт при 1000 оборотах в минуту имеет "косинус фи", равный при полной нагрузке 0,83. При ¾ нагрузки тот же двигатель имеет cos φ = 0,8. При ½ нагрузке cos φ = 0,7 и при ¼ нагрузки cos φ = 0,5.
Двигатели, работающие вхолостую, имеют "косинус фи", равный от 0,1 до 0,3 в зависимости от типа, мощности и скорости вращения.
Двигатели быстроходные и большой мощности имеют более высокий "косинус фи", чем тихоходные и маломощные двигатели. Двигатели закрытого типа имеют cos φ ниже, чем двигатели открытого типа. Двигатели, неправильно выбранные по типу, мощности и скорости, понижают cos φ.
В часы малых нагрузок, обеденных перерывов и тому подобного напряжение сети на предприятии увеличивается на несколько вольт. Это ведет к увеличению намагничивающего тока индивидуальных потребителей (реактивной составляющей их полного тока), что в свою очередь вызывает уменьшение cos φ предприятия.
При перемотке электродвигателей обмотчики вследствие неправильного подбора проводов иногда не заполняют пазы машины тем количеством проводников, которое было в фабричной обмотке. При работе такого двигателя, вышедшего из ремонта, увеличивается магнитный поток рассеяния, что приводит к уменьшению cos φ двигателя.
При сильном износе подшипников ротор двигателя может задевать при вращении за статор. Вместо того чтобы сменить подшипники, обслуживающий персонал иногда идет по неправильному и вредному пути и подвергает ротор обточке.
Увеличение воздушного зазора между ротором и статором вызывает увеличение намагничивающего тока и уменьшение cos φ двигателя.
Вышеперечисленные последствия низкого cos φ с достаточной убедительностью говорят о том, что необходимо вести борьбу за высокий cos φ. К мерам увеличения cos φ относятся:
Малый вес конденсаторов, отсутствие вращающихся частей, незначительные потери энергии в них, легкость обслуживания, безопасность и надежность в работе дают возможность широкого применения статических конденсаторов для повышения cos φ двигателей.
Подбирая величину емкости при параллельном соединении и емкости, можно добиться уменьшения угла сдвига фаз между напряжением и общим током при неизменной активной и реактивной мощности, потребляемой ветвью с индуктивностью. Этот угол можно сделать равным нулю. Тогда ток, текущий на общем участке цепи, будет иметь наименьшую величину и совпадать по фазе с напряжением сети.
Это явление называется компенсацией сдвига фаз и широко используется на практике.По экономическим соображениям невыгодно доводить угол φ до нуля, практически целесообразно иметь cos φ = 0,9 – 0,95.
Рассмотрим расчет емкости конденсаторов, которые нужно включить параллельно индуктивной нагрузке, чтобы повысить cos φ до заданной величины.
На рисунке 1, а изображена схема включения индуктивной нагрузки в сеть переменного тока. Для увеличения коэффициента мощности параллельно потребителю включена батарея конденсаторов. Векторная диаграмма начинается с построения вектора напряжения U. Ток I1 вследствие индуктивного характера нагрузки отстает по фазе от напряжения сети на угол φ1. Необходимо уменьшить угол сдвига фаз между напряжением U и общим током до величины φ. Иначе говоря, увеличить коэффициент мощности от значения cos φ1 до значения cos φ.

Рисунок 1. Увеличение cos φ при помощи статических конденсаторов:а – схема включения; б – векторная диаграмма
Отрезок ос, представляющий активную слагающую тока I1, равен:
ос = I1 × cos φ1 = оа × cos φ1 .
Пользуясь выражением мощности переменного тока
P = U × I × cos φ ,
отрезок ос выразим так:

Ток на общем участке цепи I равен геометрической сумме тока нагрузки I1 и тока конденсатора IC.
Из треугольника оас и овс имеем:
ас = ос × tg φ1 ;bс = ос × tg φ .
Из диаграммы получаем:
ab = od – ac – bc = ос × tg φ1 – ос × tg φ = oc × (tg φ1 – tg φ) .
Так как  и ab = IC , то
и ab = IC , то

Вместе с этим, как было указано выше,
IC = U × ω × C .
Следовательно,

Пример 1. Электрические двигатели шахты потребляют мощность 2000 кВт при напряжении 6 кВ и cos φ1 = 0,6. Требуется найти емкость конденсаторов, которую нужно подключить на шины установки, чтобы увеличить cos φ до 0,9 при f = 50 Гц.
Решение.
cos φ1 = 0,6; φ1 = 53°10’; tg φ1 = 1,335;
cos φ = 0,9; φ = 25°50’; tg φ = 0,484;


Источник: Кузнецов М. И., "Основы электротехники" - 9-е издание, исправленное - Москва: Высшая школа, 1964 - 560 с.
www.electromechanics.ru
На шильдиках двигателей и некоторых других устройств можно видеть непонятный параметр косинус фи (cos φ). Что этот параметр означает, в данной статье коротко объясняется, что это такое.Косинус фи (cos φ) часто называют «Коэффициент мощности». Это почти одно и то же при правильной синусоидальной форме тока.Иногда для обозначения коэффициента мощности используется λ, эту величину выражают в процентах, или PF.
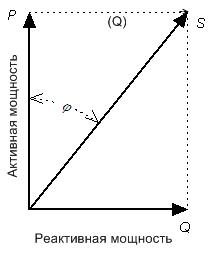
P — активная мощность S — полная мощность Q — реактивная мощность, U — напряжение I — ток.
Косинус фи (cos φ) это косинус угла между фазой напряжения и фазой тока.При активной нагрузке фаза напряжения совпадает с фазой тока, φ (между фазами) равен 0 (нулю). А как мы знаем cos0=1. То есть при активной нагрузке коэффициент мощности равен 1 или 100%.

При емкостной или индуктивной нагрузке фаза тока не совпадает с фазой напряжения. Получается «сдвиг фаз».При индуктивной или активно-индуктивной нагрузке (с катушками: двигатели, дросселя, трансформаторы) фаза тока отстает от фазы напряжения.При емкостной нагрузке (конденсатор) фаза тока опережает фазу напряженияА почему тогда косинус фи (cos φ) это тоже самое что коэффициент мощности, да потому что S=U*I.Посмотрите на графики ниже. Здесь φ равно 90 косинус фи (cosφ)=0(нулю).


Попытаемся вычислить мощность для простоты возьмем максимальное значение напряжения равное 1(100%) в этот момент ток равен 0(нулю) соответственно их произведение, то есть мощность равны 0(нулю). И наоборот когда ток максимальный напряжение равно нулю.Получается что полезная, активная мощность равна 0(нулю).
Коэффициент мощности это соотношение полезной активной мощности к полной мощности, то есть cosφ=P/S.

Посмотрите на треугольник мощностей. Вспомним тригонометрию (это что то из математики) вот здесь то она нам и пригодится.
P=U x I x cos φ
Q =U x I x sin φ

На практике. Если подключить асинхронный двигатель в сеть без нагрузки, в холостую. Напряжение вроде как есть, ток, если замерить тоже есть, при этом ни какой полезной работы не совершается. Соответственно активная мощность минимальна.Если на двигателе увеличить нагрузку то сдвиг фаз начнет уменьшаться и соответственно косинус фи (cos φ) будет увеличиваться, а с ним и активная мощность.
К счастью счетчики активной мощности фиксируют соответственно только активную мощность. И нам не приходится переплачивать за полную мощность.
Однако у реактивной мощности есть большой минус она создает бесполезную нагрузку на электрическую сеть из-за этого образуются потери.
www.elektroceh.ru
Коэффициент мощности (cos φ, косинус фи ), Полная (кажущаяся), активная и реактивная мощность электродвигателя=электромотора и не только его. Коэффициент мощности для трехфазного электродвигателя.
На шильдиках многих электромоторов (электродвигателей и др. устройств) указывают активную мощность в Вт и cosφ / или λ /или PF. Что тут к чему см. ниже.
Подразумеваем,что переменное напряжение в сети синусоидальное - обычное, хотя все рассуждения ниже верны и для всех гармоник по отдельности других периодических напряжений.
Полная, или кажущаяся мощность S (apparent power) измеряется в вольт-амперах (ВА или VA) и определяется произведением переменных напряжения и тока системы. Удобно считать, что полная мощность в цепи переменного тока выражается комплексным числом таким, что активная мощность является его действительной частью, реактивная мощность — мнимой.
 |
|
Активная мощность P (active power = real power =true power) измеряется в ваттах (Вт, W) и это та мощность, которая потребляется электрическим сопротивлением системы на тепло и полезную работу. Для сетей переменного тока:
Реактивная мощность Q (reactive power) измеряется в вольт-амперах реактивных (вар, var) и это электромагнитная мощность, которая запасается и отдается обратно в сеть колебательным контуром системы. Реактивная мощность в идеале не выполняет работы, т.е. название вводит в заблуждение. Легко догадаться глядя на рисунок, что:
Сама концепция активной и реактивной мощности актуальна для устройств (приемников) переменного тока. Она малоактуальна=никогда не упоминатеся для приемников постоянного тока в силу малости (мизерности) соответствующих эффектов, связанных только с переходными процессами при включении/выключении.
Любая система, как известно, имеет емкость и индуктивность = является неким колебательным контуром. Переменный ток в одной фазе накачивает электромагнитное поле этого контура энергией а в противоположной фазе эта энергия уходит обратно в генератор ( в сеть). Это вызывает в РФ 3 проблемы (для поставщика энергии!)
попробуем догадаться, что делает поставщик электроэнергии? Правильно, пытается навязать Вам различные тарифы для разлиных значений cos φ. Что можно сделать: можно заказать компенсацию реактивной мощности ( т.е. установку неких блоков конденсаторов или катушек), которые заставят реактивную нагрузку колебаться внутри Вашего предприятия/устройства. Стоит ли это делать? Зависит от стоимости установки, наценок за коэффициент мощности и очень даже часто не имеет экономического смысла. В некоторых странах качество питающего напряжения тоже может пострадать от избытка реактивной мощности, но в РФ проблема неактуальна в силу изначально очень низкго качества в питающей сети.
Естественно, хотелось бы ввести величину, которая характеризовала бы степень линейности нагрузки. И такая величина вводится под названием коэффициент мощности ("косинус фи", power factor, PF), как отношение активной мощности к полной, естественно сразу в 2-х видах, в РФ это:
Коэффициент мощности для трехфазного асинхронного (обычного) электродвигателя.
cosφ = P / (√3*U*I)
где
cosφ = косинус фи
√3 = квадратный корень из трех
P = активная мощность (Вт)
U = Напряжение (В)
I = Ток (А)
tehtab.ru
 Мне много приходит писем от моих читателей и посетителей сайта, спрашивают совета, интересуются как лучше поступить в том или ином случае когда возникают затруднения в электрике для дома.
Мне много приходит писем от моих читателей и посетителей сайта, спрашивают совета, интересуются как лучше поступить в том или ином случае когда возникают затруднения в электрике для дома.
Частенько задают вопросы и по теории электротехники. Я конечно не профессор и досконально всего не знаю по теории, но в свое время у меня были хорошие преподователи по ТОЭ и хорошо “вдолбили” мне базовые знания, да я особо и не сопротивлялся)))
Поэтому на несложные вопросы могу ответить что и делаю сейчас.
В одном из писем меня спрашивают: “Почему у ассинхронного двигателя на холостом ходу низкий косинус фи?”
Отвечаю:
Потому что вся энергия, которую двигатель забирает из сети расходуется на 99% на создание магнитного поля внутри движка- намагничивание статора, создание вращающегося магнитного поля, в роторе наводится ЭДС, происходит сцепление двух магнитных полей и т.д.
Это- реактивная энергия.
Вспомним формулу косинуса фи:

По сути косинус фи (cosφ) служит показателем потребления реактивной энергии.
Сosφ показывает соотношение активной мощности к полной.
Если активная энергия (Р) расходуется на создание полезной работы, например электродвигатель приводит в движение вал токарного станка, то реактивная энергия (Q) расходуется только на создание магнитного поля.
На холостом ходу значение полезной (активной) мощности близко к нулю, а следовательно и значение косинуса фи- минимальное.
В номинальном режиме работы электродвигателя, когда к его валу подключена соответствующая наргузка, его cosφ=0,75÷0,95.
На холостом ходу- cosφ=0,08÷0,15
Поэтому и выбирают электродвигатель так, что бы он соответствовал мощности нагрузки, иначе КПД у двигателя будет низким и cosφ тоже, что приводит к излишним тратам электроэнергии.
Приведу пример: никто не будет подключать на бытовой наждак трехфазный двигатель мощностью 30 кВт если можно обойтись движком на 1-1,5кВт.
Если это сделать то такой мощный двигатель будет работать вхолостую и потреблять при этом большой ток на создание электромагнитного поля. При этом он будет зря нагружать сеть питания реактивным током, что в свою очередь приводит к увеличению потерь в проводах линии ВЛ.
Поэтому cosφ у электродвигателя должен быть максимальным.
Узнайте первым о новых материалах сайта!
Просто заполни форму:
ceshka.ru
|
Коэффициент мощности (cos φ, косинус фи ), Полная (кажущаяся), активная и реактивная мощность электродвигателя=электромотора и не только его. Коэффициент мощности для трехфазного электродвигателя. На шильдиках многих электромоторов (электродвигателей и др. устройств) указывают активную мощность в Вт и cosφ / или λ /или PF. Что тут к чему см. ниже. Подразумеваем,что переменное напряжение в сети синусоидальное - обычное, хотя все рассуждения ниже верны и для всех гармоник по отдельности других периодических напряжений. Полная, или кажущаяся мощность S (apparent power) измеряется в вольт-амперах (ВА или VA) и определяется произведением переменных напряжения и тока системы. Удобно считать, что полная мощность в цепи переменного тока выражается комплексным числом таким, что активная мощность является его действительной частью, реактивная мощность — мнимой.
Активная мощность P (active power = real power =true power) измеряется в ваттах (Вт, W) и это та мощность, которая потребляется электрическим сопротивлением системы на тепло и полезную работу. Для сетей переменного тока:
Реактивная мощность Q (reactive power) измеряется в вольт-амперах реактивных (вар, var) и это электромагнитная мощность, которая запасается и отдается обратно в сеть колебательным контуром системы. Реактивная мощность в идеале не выполняет работы, т.е. название вводит в заблуждение. Легко догадаться глядя на рисунок, что:
Сама концепция активной и реактивной мощности актуальна для устройств (приемников) переменного тока. Она малоактуальна=никогда не упоминатеся для приемников постоянного тока в силу малости (мизерности) соответствующих эффектов, связанных только с переходными процессами при включении/выключении. Любая система, как известно, имеет емкость и индуктивность = является неким колебательным контуром. Переменный ток в одной фазе накачивает электромагнитное поле этого контура энергией а в противоположной фазе эта энергия уходит обратно в генератор ( в сеть). Это вызывает в РФ 3 проблемы (для поставщика энергии!)
попробуем догадаться, что делает поставщик электроэнергии? Правильно, пытается навязать Вам различные тарифы для разлиных значений cos φ. Что можно сделать: можно заказать компенсацию реактивной мощности ( т.е. установку неких блоков конденсаторов или катушек), которые заставят реактивную нагрузку колебаться внутри Вашего предприятия/устройства. Стоит ли это делать? Зависит от стоимости установки, наценок за коэффициент мощности и очень даже часто не имеет экономического смысла. В некоторых странах качество питающего напряжения тоже может пострадать от избытка реактивной мощности, но в РФ проблема неактуальна в силу изначально очень низкго качества в питающей сети. Естественно, хотелось бы ввести величину, которая характеризовала бы степень линейности нагрузки. И такая величина вводится под названием коэффициент мощности ("косинус фи", power factor, PF), как отношение активной мощности к полной, естественно сразу в 2-х видах, в РФ это:
Коэффициент мощности для трехфазного асинхронного (обычного) электродвигателя. cosφ = P / (√3*U*I) где cosφ = косинус фи √3 = квадратный корень из трех P = активная мощность (Вт) U = Напряжение (В) I = Ток (А) |
www.dpva.ru
Коэффициент мощности, или косинус фи в электротехнике – это отношение активной мощности P (Вт) к полной S (ВА): cos(φ) = P/S. Он указывает на то, насколько эффективно данное устройство использует электрическую энергию.
Для объяснения физического значения коэффициента мощности рассмотрим пример расчета косинуса фи для различных потребителей. Предположим, в линию переменного тока подключен идеальный конденсатор. Так как переменное напряжение непрерывно меняет свою полярность, конденсатор половину времени будет заряжаться и половину – возвращать сохраненную энергию обратно к источнику. В результате в линии будут постоянно циркулировать электроны, но чистой передачи энергии не будет. Итак, в проводнике будет и напряжение, и ток, но активной мощности не будет. Произведение U на I называется мнимой мощностью, потому что это просто математическое число, которое не имеет реального физического смысла. В этом примере коэффициент мощности равен 0.

Аналогично расчет косинуса фи для единственного идеального индуктора приведет к cos(φ) = 0, за исключением того, что его ток будет отставать от напряжения.
Теперь рассмотрим противоположный крайний случай резистивной нагрузки. В этом случае вся электрическая энергия, поступающая к ней, потребляется и преобразуется в другие виды энергии, такие как тепло. Это пример того, когда косинус фи в электрике равен 1. Все реальные схемы работают где-то в промежутке между этими двумя крайностями.
При анализе цепей синусоидальный сигнал можно представить комплексным числом (называемым вектором), модуль которого пропорционален величине сигнала, а угол равен его фазе относительно некоторой ссылки. В линейных схемах коэффициент мощности равен косинусу фи. В электротехнике это угол между фазами напряжения и тока. Эти векторы и соответствующие им активные и реактивные составляющие мощности могут быть представлены в виде прямоугольного треугольника. Конечно, напряжение – это электрическое поле, а ток – поток электронов, поэтому так называемый угол между их векторами является не более чем математической величиной. Условились считать, что индуктивная нагрузка создает положительную реактивную мощность Q (измеряемую в вольт-амперах-реактивных, ВАр). Это связано с так называемым «запаздывающим» коэффициентом, поскольку ток отстает от напряжения. Аналогично емкостная нагрузка создает отрицательную Q и «опережающий» λ.

Индукторы и конденсаторы – не единственные причины низкого косинуса фи. В электротехнике это обычное явление, когда (за исключением идеальных R, L и C) электрические цепи нелинейны, особенно из-за наличия таких активных компонентов, как выпрямители. В таких схемах ток I (t) непропорционален напряжению V (t), даже если последнее является чистой синусоидой, поскольку I (t) будет периодическим, но не синусоидальным. Согласно теореме Фурье, любая периодическая функция представляет собой сумму синусоидальных волн с частотами, кратными исходной. Эти волны называются гармониками. Можно показать, что они не способствуют передаче чистой энергии, а увеличивают ток и уменьшают коэффициент λ. Когда напряжение синусоидальное, только первая гармоника I1 обеспечит реальную мощность. Однако ее величина зависит от фазового сдвига между током и напряжением. Эти факты отражены в общей формуле расчета коэффициента мощности: λ = (I1/I) × cos(φ). Первый член в этом уравнении представляет собой искажения, а второй – смещение.

Коррекция косинуса фи в электротехнике – это любая техника увеличения коэффициента мощности до 1. В общем случае cos(φ) может варьироваться от 0 до 1. Чем выше коэффициент мощности, тем эффективнее используется электричество. Причинами несовершенства являются искажения и фазовый сдвиг между гармониками напряжения и тока той же частоты. Поэтому существуют две основные категории методов коррекции коэффициента мощности.
Гармонические искажения вызваны нелинейными компонентами, такими как мост выпрямителя в источниках питания постоянного тока, который подключается непосредственно к большому накопительному конденсатору. Их можно скорректировать на этапе проектирования источника питания путем введения различных пассивных или активных схем компенсации. Основным источником фазового сдвига U-I являются промышленные асинхронные двигатели, которые с точки зрения схемы имеют индуктивную нагрузку. Косинус фи двигателя (который на холостом ходу падает до 0,1) можно увеличить, добавив внешние компенсирующие конденсаторы. При этом их необходимо установить как можно ближе к нагрузке, чтобы избежать циркуляции реактивной мощности до места их размещения.

Активная компенсация реактивной мощности использует активные электронные схемы с обратной связью, которые сглаживают форму кривой выпрямленного тока.
Нелинейные устройства генерируют гармонические колебания с частотой ƒ=1/(2π√LC). Если она совпадает с одной из гармоник, то будет усиливаться, что может привести к различным последствиям, в т. ч. катастрофическим. Во избежание этого, последовательно с компенсирующим конденсатором подсоединяют небольшой индуктор, что образует т. н. шунтирующий фильтр подавления гармоник.
Существует несколько причин для корректировки косинуса фи для различных потребителей. Известно, что когда λ < 1, в линии циркулируют переменные токи, которые не передают активную мощность, но вызывают рассеивание тепла в проводке, создают дополнительную нагрузку на генераторы и требуют электрогенерирующего оборудования большего размера. Вот почему электроэнергетические компании могут взимать с крупных клиентов дополнительную плату при λ < 0,95, выставлять счета за полную мощность или штрафовать за превышение реактивной. Таким образом, для промышленного объекта компенсация мнимой составляющей может быть выгодной.

Что касается электроники, существуют правила, которые ограничивают гармоники, привносимые бытовой техникой (ПК, телевизорами и т. д.) в сеть. Несмотря на отсутствие международных стандартов, которые непосредственно регулируют коэффициент мощности, его корректировка автоматически снижает гармонические искажения. Таким образом, для разработчиков блоков питания основной причиной повышения косинуса фи трансформатора является удовлетворение конкретного требования к содержанию гармоник, даже если оно не может давать никаких прямых выгод ни для производителя, ни для пользователя.
В быту низкий λ уменьшает пропускную способность проводников и автоматических выключателей. Помимо этого, вопреки распространенному заблуждению лиц, не знакомых с основами электротехники, домовладельцы и потребители от коррекции коэффициента мощности выгоды не получают.

Производится ряд «приборов», предлагаемых через Интернет, продавцы которых утверждают, что они сократят счета за электричество, корректируя коэффициент мощности в домашней электросети. Их рекламируют под разными названиями. В связи с этим потребители часто спрашивают, уменьшит ли компенсация реактивной мощности счета за электричество? Действительно, коррекция λ снижает потребление полного тока и соответственно уменьшает Q. Однако в настоящее время в жилых домах реактивная мощность не тарифицируется. Знание основ электротехники позволяет избежать участи жертв такого обмана.
Потребители платят исключительно за активную энергию, т. е. за киловатт-часы, и это единственное, что могут измерить старомодные ротационные счетчики. Технически снижение реактивной составляющей немного снизит потери в кабелях между счетчиком коммунальных услуг и точкой соединения компенсатора мнимой мощности, но этот эффект пренебрежительно незначителен. По большому счету, улучшение коэффициента λ и снижение мнимого тока практически не влияет на показания счетчика. Теоретически ситуация изменится, если внутренние тарифы будут включать плату за киловольт-ампер-часы, измеренные современными счетчиками, однако это маловероятно. Конечно, электрическим компаниям выгодно снижать Q, но сначала нужно определить показатели домашней нагрузки, чтобы не принести больше вреда, чем пользы.

По тем же соображениям нет смысла покупать технику со встроенной коррекцией коэффициента мощности. Фактически активная система компенсации даже увеличивает расходы из-за добавления стадии преобразования. Таким образом, при прочих равных условиях, потребление электроэнергии может увеличиться. Однако коррекция коэффициента мощности в электронике дает определенные технические выгоды. В частности, это увеличивает количество ватт, которые можно извлечь из розетки. Другим преимуществом является то, что приборы могут работать при любом напряжении (115 или 230 В). Но стоит ли это дополнительной платы?
fb.ru
1. Энергетическая диаграмма и коэффициент полезного действия асинхронного двигателя.
2. Коэффициент мощности асинхронного двигателя.
3. Рабочие характеристики асинхронного двигателя.
4. Пуск и регулирование скорости вращения.
1. Энергетическая диаграмма и коэффициент полезного действия
асинхронного двигателя.
Рассмотрим асинхронный двигатель, на валу которого имеется нагрузка и обмотка статора которого потребляет из сети электроэнергию мощностью  .
.

На энергетической диаграмме представлено распределение энергии при работе асинхронного двигателя.
Часть мощности теряется в статоре на потери в проводниках обмотки  и потери на гистерезис и вихревые токи в стали сердечника Pc. ставшаяся часть электрической мощности посредством вращающегося
и потери на гистерезис и вихревые токи в стали сердечника Pc. ставшаяся часть электрической мощности посредством вращающегося
магнитного потока передается со статора на ротор:
электромагнитная мощность 
Электромагнитная мощность Рэм определяется током и ЭДС ротора. Часть мощности Рэм теряется в проводниках обмотки Рэ . Оставшаяся часть мощности преобразуется в механическую мощность Рмех, под действием которой ротор асинхронного двигателя вращается. Часть механической мощности Рмех теряется на трение в подшипниках, на вентиляцию и т.д. и являются механическими потерями Рмх. Другая часть мощности теряется из-за рассеяния магнитного поля в зубьях статора и ротора и является добавочными потерями Рдоб.
Таким образом, полезная механическая мощность на валу двигателя

Эта мощность указывается в паспортных данных асинхронного двигателя. Коэффициент полезного действия (кпд) двигателя определяется

Двигатели малой и средней мощности имеют номинальный кпд в пределах 0,7 - 0,9, двигатели большой мощности имеют кпд 0,94 - 0,96.
2. Коэффициент мощности асинхронного двигателя.
Наряду с расходом активной энергии на валу двигателя и в самой машине часть энергии, реактивной, периодически возвращается в сеть. Эта часть энергии характеризуется реактивной мощностью Q1 . Коэффициент мощности двигателя равен

Он зависит от момента нагрузки на валу двигателя. При холостом ходе коэффициент мощности
cos = 0,08 - 0,15. С возрастанием нагрузки активная мощность увеличивается, возрастает и cos
= 0,08 - 0,15. С возрастанием нагрузки активная мощность увеличивается, возрастает и cos до 0,75 - 0,95. С дальнейшим возрастанием нагрузки существенно увеличиваются токи статора и ротора, и возрастает реактивная мощность рассеяния. Cos
до 0,75 - 0,95. С дальнейшим возрастанием нагрузки существенно увеличиваются токи статора и ротора, и возрастает реактивная мощность рассеяния. Cos  постепенно уменьшается.
постепенно уменьшается.
3. Рабочие характеристики асинхронного двигателя.
Механическая характеристика.
Зависимость скорости вращения ротора двигателя от момента, развиваемого им, называется механической характеристикой двигателя
n = f (Mэм) ,  = f (Mэм) ,
= f (Mэм) ,
где Мэм - электромагнитный момент, действующий на ротор.
Механической характеристикой является также зависимость S= f(Мэм).
В установившемся режиме Mэм = М, где М - момент на валу.
Известно, что момент можно представить:


Мощность Рэ2 можно выразить через ток I2, который легко определяется из схемы замещения. После подстановки получим подобной трансформатору


Из формулы видно, что с возрастанием скольжения S момент вначале возрастает и далее уменьшается. Максимальное значение момента соответствует критическому скольжению Sкр. Приближенно, при  можно считать:
можно считать:

где  - реактивное сопротивление потока рассеяния.
- реактивное сопротивление потока рассеяния.
Для практических целей удобно пользоваться другой формулой момента:


где Мmax - максимальное значение момента.
Из формулы видно, что с изменением  изменяется ход механической характеристики. Она, например, смещается вниз с увеличением
изменяется ход механической характеристики. Она, например, смещается вниз с увеличением  .
.

Зависимости n, S, M, cos и
и  = f(P2) при U1= Uном = const, f = const ,представленные на рис. , являются рабочими характеристиками асинхронного двигателя.
= f(P2) при U1= Uном = const, f = const ,представленные на рис. , являются рабочими характеристиками асинхронного двигателя.
К рабочим характеристикам относят также зависимость I1= f(P2). Зависимость n=f(P2) или S=f(P2) называется скоростной характеристикой. На холостом ходу, т.е. при Р2 =0, ротор вращается со скоростью . С увеличением мощности нагрузки
. С увеличением мощности нагрузки

Рис.
скорость вращения n уменьшается, а скольжение S растет.
Зависимость M = f(P ) называется моментной характеристикой. При отсутствии нагрузки к валу двигателя приложен небольшой момент на преодоление сил трения. Поэтому при Р2 = 0 М = Мтр. С возрастанием Р кпд вначале возрастает, а в дальнейшем уменьшается, так как при больших токах статора и ротора мощность электрических потерь, пропорциональная квадрату токов, возрастает быстрее мощности P2 .
Так как при холостом ходе I1 = I0 и его основной составляющей является намагничивающая составляющая, совпадающая по фазе с магнитным потоком, cos асинхронных двигателей довольно низок - примерно 0,2. С увеличением нагрузки ток статора все в большей степени определяется активной составляющей тока ротора и cos увеличивается. При больших мощностях увеличивается мощность рассеяния.
асинхронных двигателей довольно низок - примерно 0,2. С увеличением нагрузки ток статора все в большей степени определяется активной составляющей тока ротора и cos увеличивается. При больших мощностях увеличивается мощность рассеяния.
4. Пуск и регулирование скорости вращения.
В момент пуска частота вращения n = 0, а скольжение S = 1. Поэтому имеет место бросок пускового тока, который в 5-6 раз больше номинального. Для снижения пускового тока используют пусковые реостаты в двигателях с фазным ротором или понижают на период пуска напряжение, подводимое к статору. Пуск с помощью пускового реостата осуществляют только для двигателей с фазным ротором. К обмотке каждой фазы ротора через контактные кольца подключен пусковой реостат.

Рис.35
При включении пускового реостата, имеющего максимальное сопротивление, двигатель трогается с места при Мп = Мmax (характеристика I на рис. ). После того, как ротор приходит во вращение, его момент начинает уменьшаться (точка 1' ). Сопротивление пускового реостата уменьшают, что приводит к переходу рабочей точки на новую характеристику (точка 2) Таким образом, с вводом реостата рабочая точка механической характеристики перемещается по ломаной 1 - 1' - 2 - 2' - 3 - 3' - . . . . и т. д. пока не выйдет по естественной ветви при сопротивлении реостата, равном нулю, в номинальный режим ( точка А, рис. ). Пуск при пониженном напряжении применяют для двигателей с короткозамкнутым ротором. Так как вращающий момент пропорционален квадрату напряжения, такой способ пуска применим только при отсутствии нагрузки на валу двигателя. В нормальном режиме обмотки статора двигателя соединены треугольником. При пуске обмотки соединяют звездой, что приводит к уменьшению напряжения на обмотке в  раз. Во столько же раз уменьшается и фазный ток в обмотке статора. Так как при соединении звездой Iл = Iф, а при
раз. Во столько же раз уменьшается и фазный ток в обмотке статора. Так как при соединении звездой Iл = Iф, а при
соединении треугольником он больше фазного в  раз, то при переключении обмоток двигателя на звезду линейный ток уменьшается в три раза. После разгона двигателя обмотку статора переключают на треугольник. Скорость вращения асинхронного двигателя можно регулировать следующими способами:
раз, то при переключении обмоток двигателя на звезду линейный ток уменьшается в три раза. После разгона двигателя обмотку статора переключают на треугольник. Скорость вращения асинхронного двигателя можно регулировать следующими способами:
1 - включение добавочных сопротивлений в цепь ротора (для двигателей с фазным ротором).
С увеличением сопротивления скорость вращения ротора уменьшается.
Достоинства: возможность плавного регулирования скорости.
Недостатки: а) дополнительные потери в роторе,
б) уменьшается жесткость механической характеристики,
т.е. увеличивается ее наклон на рабочем участке.
2 - изменением числа пар полюсов (переключением статорных обмоток)
Этим добиваются изменения скорости вращения магнитного поля.
Достоинства: не вызывает дополнительных потерь, т.е. не снижает кпд двигателя.
Недостатки: а) ступенчатое изменение скорости,
б) увеличение веса и габаритов двигателя.
3 - регулирование частоты питающего напряжения.
Этим способом достигается возможность плавного регулирования скорости двигателя и в то же время не сопровождается дополнительными потерями, т.е. соединяет в себе достоинства 1-го и 2-го методов. Недостатки: применение сложного и дорогостоящего оборудования. Данный метод наиболее перспективный. Обычно используется в асинхронных двигателях с короткозамкнутым ротором.
studfiles.net











