





Cтраница 1
Применение пускового реостата обеспечивает необходимое ограничение пускового тока, увеличение пускового момента, плавность пуска, но усложняет и удорожает электроустановку и ее эксплуатацию. [1]
Применение пускового реостата впервые было предложено М. О. До-ливо - Добровольским. В 1900 г. в журнале Электричество № 4 и 5 - 6 в статье Современное развитие техники трехфазного тока М. О. Доливо-Добровольский писал: Наиболее выгодное ( в смысле экономии тока) и плавное пускание в ход трехфазного двигателя производится введением сопротивлений ( реостатов) во вторичную якорную обмотку. [2]
Применение пускового реостата имеет также целью увеличить пусковой момент, что особенно важно для крановых электродвигателей. [4]
Применение пускового реостата, наличие контактных колец, щеток, фазного ротора, усложняет конструкцию асинхронного двигателя и увеличивает его стоимость. [6]
Конечно, применение пускового реостата значительно улучшает пусковые условия асинхронного двигателя, повышая пусковой момент и уменьшая пусковой ток. Но, с другой стороны, применение ротора с фазной обмоткой удорожает двигатель, усложняет его обслуживание и, наконец, несколько ухудшает коэффициент мощности и КПД двигателя. У двигателей большой мощности эта разница в коэффициенте мощности незначительна, и недостатками фазного ротора остаются удорожание машины, длительность и сложность управления ступенями пускового реостата. [7]
Следовательно, применение пускового реостата существенным образом влияет на снижение пускового тока, благодаря чему предотвращается возможность повреждения обмотки якоря. [8]
Конечно, применение пускового реостата значительно улучшает пусковые условия асинхронного двигателя, повышая пусковой момент и уменьшая пусковой ток. Но, с другой стороны, применение ротора с фазной обмоткой удорожает двигатель, усложняет его обслуживание и, наконец, несколько ухудшает cos ф и КПД двигателя. У двигателей большой мощности эта разница в КПД и cos ф незначительна и недостатками фазного ротора остаются удорожание машины, длительность и сложность управления ступенями пускового реостата. [9]
Конечно, применение пускового реостата значительно улучшает пусковые условия асинхронного двигателя, повышая пусковой момент и уменьшая пусковой ток. Но, с другой стороны, применение ротора с фазной обмоткой удорожает двигатель, усложняет его обспуживание и, наконец, несколько ухудшает коэффициент мощности и КПД двигателя. У двигателей большой мощности эта разница в коэффициенте мощности незначительна, и недостатками фазного ротора остаются удорожание машины, длительность и сложность управления ступенями пускового реостата. [10]
Конечно, применение пускового реостата значительно улучшает пусковые условия асинхронного двигателя, повышая пусковой момент и уменьшая пусковой ток. Но, с другой стороны, применение ротора с фазной обмоткой удорожает двигатель, усложняет его обсауживание и, наконец, несколько ухудшает коэффициент мощности и КПД двигателя. У двигателей большой мощности эта разница в коэффициенте мощности незначительна, и недостатками фазного ротора остаются удорожание машины, длительность и сложность управления ступенями пускового реостата. [11]
Однако эти двигатели дороже короткозамкнутых, а применение пускового реостата усложняет установку и его обслуживание. [12]
Пуск асинхронных двигателей с фазным ротором производится с применением пусковых реостатов. Пусковой реостат состоит из нескольких ступеней добавочных сопротивлений, включаемых в каждую фазу обмотки ротора. [14]
Если двигатель включается EI сеть с линейным напряжением 220 В, появляется возможность уменьшить пусковой ток без применения пусковых реостатов. Для этого в момент пуска обмотки двигателя соединяются звездой, а когда двигатель наберет скорость, переключаются на треугольник. Запуск двигателя производится при отключенной нагрузке. [15]
Страницы: 1 2
www.ngpedia.ru
При пуске двигателя с фазным ротором в цепь ротора включается добавочное активное сопротивление Rп — пусковой реостат (рис. 5.3). Пусковой реостат обычно имеет несколько ступеней и рассчитывается на кратковременное протекание тока.
Как показано ранее, при включении активного сопротивления в цепь ротора уменьшается начальный пусковой 1п и увеличивается начальный пусковой момент Мп.
Рис. 5.3. Пуск асинхронного двигателя через пусковой реостат
По мере разгона двигателя сопротивление пускового реостата уменьшают, переходя с одной его ступени на другую. Этот переход может осуществляться как вручную, так и автоматически путем закорачивания части сопротивления с помощью контакторов. Ступени пускового сопротивления рассчитываются так, чтобы при переключениях вращающий момент двигателя менялся в выбранных пределах от Мпmaxдо Мп min.
АСИНХРОННЫЕ КОРОТКОЗАМКНУТЫЕ ДВИГАТЕЛИ С УЛУЧШЕННЫМИ ПУСКОВЫМИ ХАРАКТЕРИСТИКАМИ
Улучшение пусковых характеристик за счет увеличения активного сопротивления ротора используется в короткозамкнутых асинхронных двигателях со специальными обмотками на роторе. Наибольшее применение нашли двигатели с глубокими пазами на роторе и двигатели с двойной клеткой на роторе.
Двигатели с глубокими пазами на роторе
Рис. 6.1. Глубокий паз ротора короткозамкнутого асинхронного двигателя
Рис. 6.2. Распределение плотности тока в стержне ротора по его высоте
У таких двигателей высота паза ротора в несколько раз больше его ширины. В пазах располагается узкий высокий проводник (рис. 6.1). Идея улучшения пусковых характеристик в таком двигателе основана на том, что при скольжениях, близких к единице, когда частота тока в роторе примерно равна частоте сети, в этих проводниках будет наблюдаться вытеснение тока, в результате которого активное сопротивление проводника возрастает, а индуктивное уменьшается. Вытеснение тока в проводниках происходит в результате действия потока пазового рассеяния Фσ1.
На рис. 6.1 показано распределение индукционных линий потока рассеяния в пазу ротора. Если проводник по высоте условно разбить на отдельные элементы равных размеров, то нижние его элементы будут сцеплены с большим числом индукционных линий, чем верхние. В соответствии с этиминдуктивное сопротивление рассеяния нижних элементов будет больше, чем верхних, так как все элементы проводника включены между собой параллельно. Поэтому большая часть тока пройдет по верхним элементам. На рис. 6.2 показано распределение плотности тока J2 по высоте проводника, откуда видно, что ток в проводнике вытесняется в направлении к внешней поверхности ротора. Так как в этом случае по нижней части проводника ток практически не протекает, то его можно не учитывать. Рабочее сечение проводника при этом уменьшается, а активное его сопротивление увеличивается. Индуктивное сопротивление проводника при вытеснении тока уменьшается, так как индукционные линии поля рассеяния в основном сосредоточены в верхней части паза, т. е. поперечное сечение для прохождения потока рассеяния в пазу, а следовательно, и магнитная проводимость уменьшаются.
По мере разгона двигателя частота тока в роторе уменьшается, вследствие чего уменьшаются и различия в индуктивных сопротивлениях элементов проводника. Явление вытеснения тока при этом ослабевает, и распределение тока по высоте проводника выравнивается. По окончании пуска ток в проводнике распределяется практически равномерно, а активное сопротивление обмотки ротора уменьшается по сравнению с его значением при s=1.
Рабочие характеристики двигателей с глубоким пазом имеют тот же вид, что и у обычных двигателей. Но так как из-за большой высоты паза у этих двигателей x2 в рабочем режиме будет больше, чем у обычных, то их рабочие свойства ухудшаются: cos φ1 получается меньше на 2—4%, а максимальный момент — на 10—20 %.
В то же время у двигателей с глубоким пазом увеличивается кратность начального пускового момента и уменьшается кратность начального пускового тока. Обычно у них kпМ = 1,24-1,4 и kпI =4,5-6,5. Отметим, что большинство выпускаемых промышленностью двигателей нормального исполнения имеют углубленные пазы и у них в определённой мере проявляется явление вытеснения тока.
poznayka.org
Включение в цепь фазного ротора на время пуска добавочного сопротивления rp (пускового реостата) позволяет уменьшить величину пускового тока, увеличить (при необходимости) значение пускового момента и тем самым улучшить условия протекания процесса пуска. При наличии пускового реостата rp в цепи ротора значения пускового тока и пускового момента определяются по формулам:
С увеличением сопротивления rp критическое скольжение увеличивается и пусковой момент повышается. При некотором значении rp критическое скольжение становится равным единице, а начальный пусковой момент достигает наибольшего значения, равного критическому моменту.
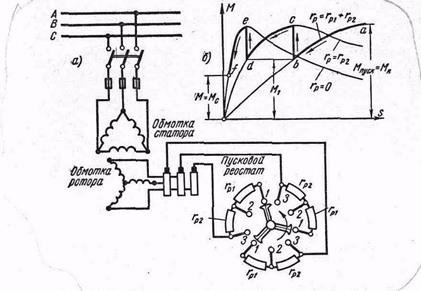
Схема пуска асинхронного двигателя с помощью двухступенчатого реостата (а) и механические характеристики (б).
Значение rp, при котором М пуск.нач =М к, можно определить из формулы :
 , приняв Sк.р. = 1:
, приняв Sк.р. = 1:

Для поддержания развиваемого двигателем вращающего момента на определенном уровне включаемый в цепь фазного ротора пусковой реостат rp выполняется из нескольких последовательно соединенных сопротивлений (ступеней). В процессе пуска эти сопротивления постепенно выключаются. При достижении двигателем рабочей скорости реостат оказывается полностью выключенным, а обмотка ротора — замкнутой накоротко.
На рис. а показана схема включения двигателя с трехфазным двухступенчатым реостатом в цепи ротора. Реостат имеет три положения. В положении 1 в цепь ротора включены сопротивления r1p+r2p, в положении 2—сопротивления r2p , в положении 3 реостат выключен. Вращающий момент двигателя в процессе пуска изменяется по кривой abcdef (рис. б). Точка f соответствует установившемуся режиму работы двигателя на естественной характеристике с моментом М = Мс.
poznayka.org
Для уменьшения пускового тока и увеличения пускового момента в цепь ротора асинхронного двигателя с фазным ротором включают пусковой реостат, состоящий из нескольких ступеней сопротивления. Схема включения реостата аналогична включению регулировочного реостата. Сопротивления ступеней пускового реостата и момент их переключения должны обеспечить поддержание пускового момента в прцессе разгона в некоторых пределах от максимального до минимального значения.
Для расчета испол-ся упрощенная формула Клосса 

и зависимость критического скольжения от сопротивления

Рис.2.9.1. Схема включения реостата в цепь ротора и пусковые характеристики при реостатном пуске
Максимальный пусковой момент (точка 1) при неподвижном роторе при скольжении Sk1=1 равен критическому моменту. Он может быть получен, если в цепь ротора ввести добавочное сопротивление
 .
.
При разгоне двигателя с этим сопротивлением в цепи ротора до скольжения S2 (точка 2) пусковой ток спадает, а пусковой момент снижается до минимального значения Mmin. Затем закорачивается первая ступень пускового реостата при скольжении

После закорачивания 1 ступени вращающий момент опять достигает максимального значения (точка 3). Этому соответствует критическое скольжение на новой механической характеристике

и добавочное сопротивление в цепи ротора
 .
.
При разгоне двигателя с этим сопротивлением в цепи ротора до скольжения S4 (точка 4) пусковой ток опять спадает, а пусковой момент снижается до минимального значения Mmin. Закорачивют вторую ступень пускового реостата. Это скольжение равно

и добавочное сопротивление в цепи ротора
 .
.
Если скольжение равно критическому скольжению естественной механической характеристики  , то эта ступень реостата последняя. Далее разгон продолжается по естественной характеристике до точки 6, соответствующей моменту нагрузки на валу
, то эта ступень реостата последняя. Далее разгон продолжается по естественной характеристике до точки 6, соответствующей моменту нагрузки на валу  .
.
Регулирование частоты вращения асинхронного двигателя изменением числа полюсов.
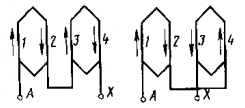
а — при четырех полюсах; б — при двух полюсах
Этот способ позволяет получить ступенчатое изменение частоты вращения. Для этой цели отдельные катушки 1, 2 и 3, 4, составляющие одну фазу (рис. 266), переключаются так, чтобы изменялось соответствующим образом направление тока в них (например, с последовательного согласного соединения на встречное). При согласном включении катушек (рис. 266, а) число полюсов равно четырем, при встречном включении (рис. 266, б) — двум. Катушки двух других фаз, сдвинутые в пространстве на 120°, соединяются таким же образом. Такое же уменьшение числа полюсов можно осуществить при переключении катушек с последовательного на параллельное соединение. При изменении числа полюсов изменяется частота вращения n1 магнитного поля двигателя, а следовательно, и частота вращения n его ротора. Если нужно иметь три или четыре частоты вращения n1, то на статоре располагают еще одну обмотку, при переключении которой можно получить еще две частоты. Существуют двигатели, которые обеспечивают изменение частоты вращения n1 при постоянном наибольшем моменте или при приблизительно постоянной мощности
Момент асинхронного двигателя при переключении полюсов изменяется пропорционально индукции
Регулирование частоты вращения асинхронного двигателя изменением частоты подведенного напряжения
Этот способ требует наличия преобразователя частоты, к которому должен быть подключен асинхронный двигатель. На основе управляемых полупроводниковых вентилей (тиристоров) созданы статические преобразователи частоты и построен ряд опытных электровозов и тепловозов с асинхронными двигателями, частота вращения которых регулируется путем изменения частоты питающего напряжения. Такой способ регулирования частоты вращения ротора асинхронного двигателя является весьма перспективным.
При  этот закон принимает вид
этот закон принимает вид
 или
или  ;
;
infopedia.su
ЛЕКЦИЯ 10
Управление трехфазным асинхронным двигателем:
напряжением, реостатное и частотно-токовое
Управление напряжением
При управлении напряжением изменяются действующие значения фазных напряжений обмотки статора. Согласно формуле (9.7) электромагнитный момент пропорционален квадрату напряжения. Семейство механических характеристик показано на рис. 10.1. Достоинством этого метода является простота схемы управления. К недостаткам относится то, что характеристики расположены неравномерно из-за квадратичной зависимости. Далее, при малом напряжении жесткость механической характеристики мала. Наконец, диапазон регулирования скорости вращения узкий – от номинальной до критической скорости.

Рис. 10.1. Механические характеристики асинхронного
двигателя при управлении напряжением.
Реостатное управление
Реостатное управление возможно у двигателей с фазным ротором. Трехфазная обмотка ротора такого двигателя выполняется медным изолированным проводом и подключена к трем контактным кольцам, установленным на валу. К этим кольцам прижаты три комплекта щеток, соединенных с трехфазным пусковым или регулировочным реостатом.
Из формулы для электромагнитного момента (9.7) следует, что момент Мзависит от отношенияr2'/s, а при наличии реостата в цепи ротора – от отношения (r2' +rр')/s. Например, если суммарное активное сопротивление в фазе ротора и скольжение увеличить в два раза, то электромагнитный момент не изменится. При увеличении скольженияs возрастает частота скольжения ω2=sω1, а скорость вращения ω = ω1– ω2уменьшается.
Семейство механических характеристик при реостатном управлении показано на рис. 10.2. Видно, что все характеристики имеют одинаковый критический момент, а при увеличении сопротивления реостата характеристика смещается в сторону меньшей скорости.
Достоинством реостатного управления является снижение тока при малых скоростях вращения ротора и увеличение пускового момента. Это явление можно объяснить по формуле (9.1). При увеличении сопротивления реостата rр величина тока I2 уменьшается, а его активная составляющая I2 cosφ2 возрастает.
Вторым достоинством является широкий диапазон регулирования скорости вращения (от номинальной до нуля).

Рис. 10.2. Механические характеристики асинхронного
двигателя при реостатном управлении
Недостатки реостатного управления: наличие щеточного контакта, сложность конструкции, дороговизна; в реостате выделяется мощность в виде тепла, что снижает КПД; с увеличением сопротивления реостата снижается жесткость механической характеристики.
Недостатки реостатного управления: наличие щеточного контакта, сложность конструкции, дороговизна; в реостате выделяется мощность в виде тепла, что снижает КПД; с увеличением сопротивления реостата снижается жесткость механической характеристики.

Рис. 10.3. Пуск асинхронного двигателя с помощью реостата
На рис. 10.3 показаны три механические характеристики. Характеристика с участком d-e-f является естественной, сопротивление пускового реостата здесь равно нулю. Механическая характеристика с участком b-c-d – искусственная с сопротивлением реостата rр'. Механическая характеристика с участком a-b – искусственная с сопротивлением реостата rр'' > rр'. Видно, что пусковой момент на этой характеристике равен критическому моменту Мк.
Рассмотрим последовательность действий для разгона двигателя до номинальной скорости за минимальное время. На обмотку статора подается номинальное напряжение питания при сопротивлении реостата rр''. В начальный момент пуска двигатель развивает максимальный момент Mк. Происходит разгон двигателя от точки a до точки b.
Теперь пусковой реостат переключается с сопротивления rр'' на сопротивление rр'. Ток ротора I2 быстро нарастает, но косинус угла сдвига по фазе cosφ2 уменьшается. В результате рабочая точка остается на месте.
Далее происходит разгон двигателя от точки b через точку с до точки d. Теперь пусковой реостат переключается с сопротивления rр' на нулевое сопротивление. Далее происходит разгон двигателя по естественной характеристике из точки d через точку e в точку f. Это номинальный режим работы.
Частотно-токовое управление асинхронным двигателем
с помощью зависимого инвертора частоты
Номинальная скорость вращения трехфазного асинхронного двигателя близка к синхронной скорости, а номинальное скольжение составляет 3-5 %. Это связано с тем, что электромагнитный момент создается активной составляющей тока ротора, которая уменьшается при увеличении скольжения из-за увеличения индуктивного сопротивления обмотки ротора. Если скорость вращения нужно менять в широких пределах, то целесообразно изменять частоту питания согласно формуле
 (10.1)
(10.1)
где  оптимальная частота скольжения, а ω – скорость вращения ротора.
оптимальная частота скольжения, а ω – скорость вращения ротора.
Электромагнитный момент определяется формулой

где в числителе имеется квадрат напряжения фазы U1, а в знаменателе в квадратных скобках – квадрат продольного сопротивления схемы замещения фазы асинхронного двигателя. Частное от деления указанных величин дает квадрат тока фазы статора, т.е. справедливы соотношения

 (10.2)
(10.2)
Формулы (10.1), (10.2) показывают, что при изменении скорости вращения ротора надо менять частоту питания, а при изменении требуемого электромагнитного момента – ток фазы статора. Этим и объясняется термин ''частотно-токовое управление''.
На рис. 10.4 показана функциональная схема асинхронного электропривода с частотно-токовым управлением. Электропривод имеет двухфазный асинхронный двигатель АД, датчик частоты вращения (тахогенератор) ДЧВ, задатчик частоты скольжения ЗЧС, идентификатор знака момента ИЗМ, устройство извлечения корня УИК, сумматор С, перемножители П1 – П3, интегратор И, функциональный преобразователь ФП, два усилителя тока УТ1, УТ2, объект управления ОУ.
Ротор двигателя механически связан с объектом управления ОУ и с ротором датчика частоты вращения ДЧВ, который вырабатывает сигнал, пропорци-

Рис. 10.4. Функциональная схема электропривода
с двухфазным асинхронным двигателем
ональный частоте вращения ротора ω. На выходе задатчика частоты скольжения ЗЧС формируется сигнал, пропорциональный модулю оптимальной частоты скольжения  . Он приходит на первый вход перемножителя П3.
. Он приходит на первый вход перемножителя П3.
Входной сигнал электропривода, пропорциональный требуемому электромагнитному моменту Мо, приходит на вход идентификатора знака момента ИЗМ, формирующий сигнал знака момента, равный 1 или –1. Этот сигнал перемножается на перемножителе П3 с модулем оптимальной частоты скольжения |ω2|, и на выходе получается частота скольжения ω2. Она суммируется на сумматоре С с частотой вращения ротора ω, поступающей от датчика частоты вращения ДЧВ. На выходе сумматора С получается частота вращения магнитного поля ω1.
Если требуемый электромагнитный момент Моположительный, то магнитное поле должно вращаться быстрее, чем ротор, и ω2> 0. Если же моментМоотрицательный, то магнитное поле должно вращаться медленнее ротора, или должно вращаться относительно ротора в отрицательном направлении, т.е. должно выполняться неравенство ω2< 0. Этим объясняется необходимость определения знака момента.
Интегратор И выдает сигнал, пропорциональный углу α1поворота магнитного потока Ф. Этот сигнал приходит на вход функционального преобразователя ФП, формирующего сигналыcos1иsin1. Они поступают на входы перемножителей П1 и П2. На выходе устройства извлечения корня УИК формируется сигнал, пропорциональный амплитуде системы токов статора:

Этот сигнал приходит на вторые входы перемножителей П1, П2, на выходах которых формируются требуемые значения токов обмотки статора:


Эти значения приходят на входы усилителей тока УТ1 и УТ2. Они представляют собой усилители напряжения, охваченные глубокой отрицательной обратной связью по току нагрузки с помощью датчиков тока. Эти усилители питают фазы обмотки статора асинхронного двигателя токами, близкими к требуемым значениям:


Асинхронный двигатель развивает требуемый момент
M ≈ Mo
при рациональном токе и частоте скольжения, что обеспечивает высокий КПД и энергосбережение в широком диапазоне изменения частоты вращения и электромагнитного момента.
В случае асинхронного двигателя с трехфазной обмоткой на статоре функциональный преобразователь должен формировать три функции:
sinα1,sin(α1– 2π/3),sin(α1– 4π/3),
поступающие на входы трех перемножителей, а фазы обмотки статора питаются от трех усилителей тока.
1. Отметить достоинства и недостатки управления асинхронного двигателя напряжением.
2. Отметить достоинства и недостатки реостатного управления асинхронным двигателем.
3. Почему при введении реостата в цепь ротора ток уменьшается, а электромагнитный момент возрастает?
4. Почему для быстрого разгона переключение пускового реостата производится в точках пересечения механических характеристик?
5. Почему при переключении пускового реостата в точках b, d ток в обмотке ротора возрастает, а момент сохраняется?
6. Объясните необходимость изменения частоты питания при изменении частоты вращения ротора двигателя.
7. Зачем нужно изменять величину токов обмотки статора при изменении требуемого момента?
8. Почему изменяется знак частоты скольжения при смене знака момента?
9. Как определяется частота питающих напряжений?
10. Зачем нужен сдвиг по фазе между токами фаз A и B?
11. Нарисуйте функциональную схему асинхронного электропривода с частотно-токовым управлением при трехфазной обмотке двигателя.
studfiles.net
Из рис. 1. 3 видно, что каждому значению М (кроме М = М ах) соответствуют два значения скольжения 5 и которые определяются как корни уравнения (1. 27) при заданной величине М. Пусковой момент двигателя этого типа (при 5=1) значительно меньше максимального. Пуск машины возможен только в том случае, если пусковой момент М уск будет больше начального момента сопротивления М . Для привода машин, в которых необходим большой пусковой момент (например, подъемные краны), асинхронные двигатели с характеристикой по рис. 1. 3 непригодны. [c.36]
Для напряжённого повторно-кратковременного режима короткозамкнутые двигатели подходят менее всего, так как в обмотках их роторов должно рассеиваться всё тепло от пусковых и тормозных токов. В двигателях постоянного тока и в асинхронных с кольцами большая часть этого тепла рассеивается в добавочных пусковых сопротивлениях, а не в обмотках якоря или ротора. Возможность создания специальных типов короткозамкнутых двигателей небольших мощностей, рассчитанных на пуск до 3000—4000 раз в час, не ограничена. [c.20]
Асинхронные двигатели с контактными кольцами не могут пускаться в ход без пусковых сопротивлений. Поэтому при исчезновении напряжения они обязательно должны отключаться от сети, а при внезапном появлении напряжения их пуск производится по обычным правилам из нулевого положения контроллера. Защита от исчезновения напряжения обычно осуществляется катушкой линейного контактора крановой защитной панели. [c.114]
Вводя реостат в цепь ротора, увеличивают ее сопротивление и, следовательно, уменьшают пусковой ток и увеличивают начальный пусковой момент. Частоту вращения асинхронных двигателей с фазовыми роторами регулируют изменением сопротивления цепи ротора, для чего с помощью контроллера вводят или выводят из цепи часть сопротивлений пускового реостата. При вводе или шунтировании сопротивлений соответственно уменьшается или увеличивается частота вращения двигателя. [c.25]
Короткозамкнутые асинхронные двигатели на автомобильных кранах пускаются непосредственно от генератора или внешней сети на полное напряжение с помощью магнитных пускателей. Такой пуск самый простой, но вызывает в сети большие пусковые токи при относительно малом пусковом моменте двигателя. При пуске асинхронных двигателей с фазовым ротором в цепь ротора вводят пусковой реостат, которым управляют с помощью контроллеров (грузовая лебедка) или универсальных переключателей (механизм поворота). Вводя реостат в цепь ротора, увеличивают ее сопротивление и, следовательно, уменьшают пусковой ток и увеличивают начальный пусковой момент. [c.36]
Частоту вращения асинхронных двигателей с фазовыми роторами регулируют изменением сопротивления ротора двигателя, для чего включают или выключают пусковые резисторы. Включение в цепь ротора пускового резистора уменьшает частоту вращения ротора, выключение резистора увеличивает ее. Шунтирование (выведение из цепи) части резистора производят с помощью контроллера. Регулировать частоту вращения этим способом можно только в случаях преодоления двигателем большого момента сопротивления нагрузки (подъем тяжелого груза, поворот с грузом на большом вылете). На холостом ходу, при небольшой нагрузке частота вращения двигателя практически не зависит от величины сопротивления в цепи ротора [c.20]
Введение дополнительных (пусковых) резисторов изменяет механическую характеристику асинхронного двигателя. На рис. 60 показаны механические характеристики двигателя при различных сопротивлениях резисторов, введенных в цепь ротора. Характеристика ЗУ показывает зависимость движущего момента М двигателя от частоты [c.101]
Разгон асинхронного двигателя с фазным ротором происходит путем поочередного вывода ступеней роторных резисторов. Вводом сопротивлений резисторов в цепь ротора пусковой ток двигателя снижается. Роторный ток проходит не только через обмотки двигателя, но и через пусковые резисторы. Поэтому часть тепла при пуске двигателя выделяется в роторном пусковом резисторе, снижая нагрев самого двигателя. [c.110]
Для чего у фазовых асинхронных двигателей в цепь ротора при пуске вводится добавочное сопротивление (пусковой реостат) [c.95]
Момент асинхронного двигателя в зависимости от скольжения представлен на рис. 78 при трех значениях напряжения U- , (кривая /), (кривая 2) я и3 (кривая 5), причем Ui> Ug, а зависимость момента сопротивления движению вентилятора от частоты вращения изображена кривой 4. При напряжении Ui пусковой момент двигателя Мщ больше момента вентилятора при трогании Мпъ- Следовательно, пуск произойдет, и система двигатель-вентилятор будет ускоряться, пока моменты двигателя и вентилятора не уравняются в точке с координатами М , щ (sj). При напряжении пуск также произойдет (Мп2,> Мп , НО моменты уравняются при скольжении Sg, соответствующем малой частоте вращения Если напряжение снизится до значения 0 при работающем двигателе, его скольжение возрастет до значения Sj, а частота вращения соответственно снизится до значения Токи статора и ротора в этом режиме в несколько раз превышают номинальные значения. При напряжении и3 пуск не произойдет, так как М з двигатель остановится, и значения токов статора и ротора будут соответствовать режиму короткого замыкания. При напряжениях, близких к U , работа двигателя будет нестабильной, так как при небольших изменениях напряжения частота вращения будет изменяться от нуля до значения, близкого к п . [c.90]
Для привода стреловой лебедки на некоторых кранах (К-67) устанавливают также асинхронные двигатели с короткозамкнутым ротором и повышенным скольжением серии АОС. Электродвигатели с короткозамкнутым ротором запускают при помощи магнитных пускателей, с фазовым ротором — при помощи контроллеров и пусковых сопротивлений, включаемых в цепь ротора двигателя. [c.25]
Регулируют скорости асинхронных двигателей с фазовыми роторами изменением сопротивления ротора, для чего с помощью контроллера вводят или выводят из цепи часть пусковых сопротивлений. При вводе или шунтировании сопротивлений соответственно уменьшается или увеличивается скорость вращения двигателя. [c.25]
Стоимость установки при непосредственном приводе от обычного асинхронного двигателя трехфазного тока меньше, чем при установках с умформером (схема Леонарда). Из-за соображений экономичности (строительные расходы, коэфициент мощности) применяют зубчатую передачу. Недостатки сильный толчок на электростанции в момент пуска и обратного хода кабины. Большие потери в пусковых сопротивлениях, откуда низкий коэфициент полезного действия установки при незначительной глубине шахты, [c.787]
Основными элементами асинхронного двигателя трехфазного тока являются статор и ротор. Магнитопровод статора несет трехфазную обмотку, подключаемую к питающей сети. Обмотка ротора может быть короткозамкнутой (рис. 10.1. а) или трехфазной, подсоединяемой с помощью контактных колец и щеток к пусковым сопротивлениям (рис. 10.1, б). При включении двигателя в сеть в обмотке статора возникает вращающееся электромагнитное поле с частотой вращения [c.164]
Введение дополнительных (их называют пусковыми) сопротивлений изменяет механическую характеристику асинхронного двигателя. На рис. 60 показаны механические характеристики двигателя при различных сопротивлениях, введенных в цепь ротора. Характеристика ЗУ показывает зависимость движущего момента М двигателя от скорости вращения ротора п при полностью выведенных сопротивлениях из цепи ротора. Характеристика ЗУ присуща двигателю при включенном контакте ЗУ (см. ниже). Она называется естественной характеристикой двигателя. [c.118]
Включение сопротивления в цепь обмотки ротора асинхронного двигателя значительно облегчает условия запуска за счет резкого снижения величины пускового тока. На рис. 118 показана схема включения пускового реостата сопротивления в цепь ротора асинхронного двигателя во время запуска. [c.225]
Как известно, для ограничения пусковых токов в цепь статора асинхронного двигателя вводят активное или индуктивное сопротивление. После разгона эти сопротивления шунтируются и двигатель выходит на естественную характеристику. Такой процесс можно осуществить при помощи тиристоров, если при пуске изменить угол регулирования (отпирания) и тем самым снизить напряжение, подаваемое на статор, до необходимой величины. После окончания разгона двигателя необходимо восстановить угол регулирования таким, при котором напряжение на статоре будет номинальным. [c.77]Пуск и параллельная работа одноякорных преобразователей. Пуск одноякорных преобразователей может происходить как со стороны переменного, так и со стороны постоянного тока. Для пуска одноякорных преобразователей со стороны переменного тока в полюсные башмаки закладывается беличья клетка, при помощи которой одноякорный преобразователь пускается, как асинхронный двигатель с короткозамкнутым ротором. Для уменьшения пускового тока одноякорный преобразователь пускается через автотрансформатор. При асинхронном запуске одноякорного преобразователя обмотка возбуждения должна быть замкнута через сопротивление. [c.314]
Для асинхронного двигателя с фазным ротором пусковой ток I = = (1,82,2)/ о . По этому значению 1 выбирают полное сопротивление реостата. [c.96]
Для регулирования пуска и остановки асинхронных двигателей грузоподъемных машин с целью ограничения величины ускорений и моментов, а также для ограничения пусковых токов применяются пусковые сопротивления. Изменение характеристики двигателя при включении сопротивления в цепь ротора приводится на фиг. 4. [c.25]
Недостатком асинхронных двигателей с короткозамкнутым ротором являются значительные пусковые токи, зависящие от приведенной к валу величины крутящего момента внешних сопротивлений. [c.93]
Для асинхронных электродвигателей с к. з. ротором и для синхронных двигателей механическая характеристика определяет его пусковой момент. При оценке требуемого пускового момента двигателя следует учитывать, что у ряда механизмов, в особенности таких, где трение составляет значительную часть нагрузки, пусковой момент превышает на 30—50% расчетный статический момент сопротивления при движении. [c.127]
Расчет пусковых сопротивлений. На рис. 7-50 приведена диаграмма пускового режима асинхронного двигателя с фазным ротором. Условиями пуска являются колебания пускового момента между максимальным Мг и минимальным М1 значениями. Характеристика, для которой Л=Га, соответствует естественной или характеристике с невыключаемой ступенью сопротивления, а каждая последующая, характеристика определяется сопротивлением соответствующей ступени. Учитывая пропор- [c.164]
Широко распространенным в промышленности типом привода машин является асинхронный двигатель с фазным ротором (пусковые характеристики на рис. 0. 1, г). Верхняя характеристика является естественной запуск только на этой характеристике возможен лишь в том случае, если пусковой момент при нулевой скорости превышает момент статического сопротивления Мо и мощность двигателя мала. Введением ступеней добавочного сопротивления в цепь ротора получают дополнительные искусственные характеристики, которые имеют максимумы, расположенные на одной вертикали. Двигатель запускают последовательно, начиная с самой нижней характеристики, для которой начальный моментМх при нулевой скорости значительно превышает момент Мо- В дальнейшем запуск идет по участкам характеристик, указанных жирными линиями (исследование привода этого типа см. в 6). [c.18]
Расчет пусковых сопротивлений. Для асинхронных двигателей с фазовым ротором расчет пусковых сопротивлетш производи гея аналогично тому, как это было указано для двигателей параллельного возбуждения постоянного тока, если максимальный пусковой момент /И не превосходит 0,7.S [c.418]Привод от асинхронного двигателя трех-фазпого тока (кривая 3) имеет механическую характеристику, также мало удовлетворяющую требованиям экскаваторной кривой. Эта характеристика слишком жесткая и поэтому для ее смягчения часто включают в цепь ротор постоянного сопротивления. К недостаткам рассматриваемого привода следует отнести громоздкость и недостаточную надежность аппаратуры управления, (особенно при больших мощностях), сложность применения электрического торможения в периоды замедления, большой расход энергии в пусковом реостате и роторе в связи с применением постоянно включенного в цепь ротора сопротивления. [c.231]
Асинхронные двигатели с контактными кольцами рекомендуют устанавливать на крановых механизмах, лифтах, эскалаторах, больших конвейерах и т. д. Эти двигатели имеют жесткие характеристики (которые могут быть смягчены введением сопротивления в цепь ротора) и широкий диапазон регулирования частоты вращения. Двигатели допускают частные пуски и торможения. Асинхронные электродвигатели с фазным ротором обеспечивают работу приводов в тяжелых условиях пуска и приводов, требующих регулирования частоты вращения. Для работы при повышенной температуре окружающей среды промышленность выпускает электродвигатели переменного тока серий МТН и МТКН с фазным и короткозамкнутым ротором. Эти двигатели отличаются высокой перегрузочной способностью, большими пусковыми моментами при сравнительно небольших пусковых силах тока. Исполнение двигателей — закрытые, с внешним обдувом, с одним или двумя концами вала на лапах. [c.61]
При пуске электродвигателей в первый момент, когда ротор только набирает обороты, в обмотках электродвигателя протекает повышенный ток, что может привести к понижению напряжения в сети. Во избежание этого применяют пусковые реостаты, включаемые в цепь якоря электродвигателя постоянного тока и в цепь фазного ротора асинхронного двигателя. Наиболее часто для этой цели применяют проволочные реостаты с воздушным охлаждением (рис. 80). Реостат состоит из прово-Л0ЧНЫ.Х спиралей, прикрепленных к контактам контакты располагаются на верхней плите, изготовленной из изоляционного материала. В зависимости от величины сопротивления включаемых в цепь проволочных спиралей меняется сила тока в обмотке электродвигателя. [c.137]
В асинхронных двигателях с контактными кольцами возможно иногда бывает другое переключение при малых нагрузках, имеющее также целью улучшение os обмотку ротора, рассчитанную на более высокое напряжение, чем обмотка статора (возможно лишь при относительно невысоких напряжениях переменного тока, подводимого к двигателю). Переключение для улучшения os питание двигателя совершается не со стороны статора, а со стороны ротора, и в цепь статора, играющего в этом случае роль вторичной обмотки, вводится при пуске пусковой реостат. Увеличенное сопротивление обмотки ротора при таком переключении уменьшает намагничивающий ток и индукцию в двигателе, благодаря чему уменьшается и С. ф. двигателя. Другим способом получения лучшего os асинхронных двигателях является применение вместо катушечных фазных обмоток двуслойных обмоток постоянного тока, обыкновенных или разрезных. Обмотки постоянного тока дают значительно меньшее рассеяние, благодаря чему уменьшается реактивная мощность, потребляемая двигателем, и улучшается его os 93. Повышение величины os постоянного тока против двигателей той же мощности, но с фазной обмоткой, может составить при полной нагрузке до 9% и при половинной нагрузке до 11%. Дальнейшие способы улучшения os q> в электрич. установках путем улучшения этого коэф-та у самих асинхронных двигателей сводятся к переводу асинхронных двигателей после разгона на работу в качестве синхронных двигателей путем включения постоянного тока (тока возбуждения) в обмотку ротора асинхронного двигателя или путем каскадного включения асинхронных двигателей с трехфазными коллекторными двигателями, одноякорньши преобразователями или специальными фазными компенсаторами. [c.226]
Обозначения h(H) — высота оси вращения i3jj — наружный диаметр сердечников статоров (для асинхронных двигателей) Р — номинальная мощность 7 — номинальное напряжение питания /ц —номинальное значение силы тока — номинальная частота вращения вала — номинальный момент max — максимальная частота вращения вала т — коэффициент полезного действия Ля — сопротивление якорной обмотки Лд — сопротивление дополнительных полюсов (на дополнительных полюсах располагается компенсационная обмотка, которая включается последовательно с обмоткой якоря и предназначена для улучшения процесса коммутации в щеточно-коллекторном узле) — сопротивление обмотки возбуждения — индуктивность обмотки якоря J — момент инерции якоря S — номинальное скольжение М ах> — максимальный и пусковой момент на валу соответственно (для асинхронных двигателей) — пусковой ток os ф — коэффициент мощности (отношение активной мощности цепи переменного тока к полной мощности, чем ближе к единице, тем лучше). [c.194]
Симметричное включение сопротивлений. В электроприводах с короткозамкнутыми асинхронными двигателями сопротивление в цепи статора обычно применяется для обеспечения требуемых пусковых режимов. При этом ограничиваемыми величинами являются пусковой ток или пусковой момент. Если необходимо иметь значение пускового тока, составляющего часть а пускового тока в естественной схеме включения, то добавочное активное сопротивление определяется выраженим [c.165]
Пользуясь выражением (2.6), получают величину добавочного сопротивления Ядоб в цепи якоря двигателя. Пусковые и регулировочные сопротивления находят графически (рис. 2.5, г), задаваясь пределами изменения пускового тока или момента. Совершенно так же, как и для асинхронных двигателей (см. рис. 2.2), чтобы обеспечить, нормальный пуск, нужно — момент статического сопротивления [c.141]
Для асинхронного двигателя с фазным ротором пусковой ток / ограничивается значением порядка (1,8 2,2) 1цом- По этой величине / выбирается полное сопротивление реостата. [c.103]
Кроме этого, рекомендуется не включать двигатель при разомкнутом пусковом сопротивлении, а устанавливать щетки металлического реостата на первый контакт, соответствующий полнос1ью введенному сопротивлению, а в случае жидкостного пускового реостата следует немного погрузить электроды в жидкость. В схемах автоматического пуска асинхронных двигателей с фазным ротором предусматривается их включение в сеть при полностью введенном пусковом сопротивлении. [c.30]
Защита от исчезновения напряжения отключает двигатели в том случае, когда напряжение в сети значительно снизилось или исчезло совсем. Исчезновение напряжения не влечет за собой аварии, но его внезапное появление может вызвать недопустимый са-мозапуск двигателя без ведома машиниста, а это может привести к несчастным случаям. Асинхронные двигатели с контактными кольцами и двигатели постоянного тока не могут пускаться в ход без пусковых сопротивлении. Поэтому при исчезновении напряжения они обязательно должны отключаться от сети, а при внезапном появлении напряжения их пуск производится по обычным правилам из нулевого положения контроллера постепенным, последовательным переводом его в рабочее положение. [c.101]
mash-xxl.info






