Компактность конструкций, простота соединений с насосом, легкая автоматизация управления и относительно низкие эксплуатационные затраты предопределили массовое применение электродвигателей переменного тока в качестве привода для насосов систем водоснабжения и канализации.
К приводным электродвигателям насосных агрегатов помимо их большой мощности предъявляется ряд специфических требований. Одним из определяющих является необходимость пуска двигателей под нагрузкой. Конструкция электродвигателя должна также допускать довольно продолжительное вращение ротора в обратную сторону (с угонной скоростью, определяемой характеристикой насоса), вызываемое сливом воды из напорных трубопроводов после отключения электродвигателя от сети при плановой или аварийной остановке агрегата.
Весьма желательной для улучшения условий работы энергетических систем, где применяются мощные насосные станции, является возможность частых повторных пусков, что, в свою очередь, предъявляет повышенные требования к конструкциям обмотки статора и пусковой обмотки электродвигателя, нагревание которых определяет продолжительность требуемой паузы между пусками и допустимое число пусков за рассматриваемый период.
Энергоснабжение и электропривод рассматриваются в специальных курсах, поэтому в настоящем учебнике лишь кратко освещаются особенности приводных электродвигателей различных типов, в значительной мере определяющие конструкцию и размеры машинного здания насосной станции
Асинхронные электродвигатели. При работе этих двигателей частота вращения магнитного поля статора постоянна и зависит от частоты питающей сети (стандартная частота 50 Гц) и от числа пар полюсов, а частота вращения ротора отличается на величину скольжения, составляющую 0,012-0,06 скорости магнитного поля статора. Причиной исключительно широкого применения асинхронных электродвигателей является их простота и небольшая стоимость.
В зависимости от типа обмотки ротора различают асинхронные электродвигатели с короткозамкнутым или с фазным ротором
Короткозамкнутые асинхронные электродвигатели являются наиболее подходящим электроприводом для небольших насосов они значительно дешевле электродвигателей всех других типов и, что очень существенно, обслуживание их гораздо проще Пуск этих электродвигателей - прямой асинхронный, при этом не требуется каких-либо дополнительных устройств, что дает возможность значительно упростить схему автоматического управления агрегатами
Однако при прямом включении короткозамкнутых асинхронных электродвигателей очень высока кратность пускового тока, который для двигателей мощностью 0,6 - 100 кВт при п = 750Н-3000 мин"' в 5-7 раз выше номинального тока такой кратковременный толчок пускового тока относительно безопасен для двигателя, но вызывает резкое снижение напряжения в сети, что может неблагоприятно сказаться на других потребителях энергии, присоединенных к той же распределительной сети. По этим причинам допустимая номинальная мощность асинхронных электродвигателей с короткозамкнутым ротором, пускаемым прямым включением, зависит от мощности сети и в большинстве случаев ограничивается 100 кВт.
Асинхронные электродвигатели с фазным ротором имеют более сложную и дорогую конструкцию, так как обмотки ротора у них соединяются с наружным пусковым реостатом через три контактных кольца со скользящими по ним щетками
Перед пуском такого электродвигателя в цепь ротора с помощью реостата вводят дополнительное сопротивление, благодаря чему при включении электродвигателя уменьшается сила пускового тока по мере увеличения частоты вращения двигателя сопротивление постепенно уменьшается, а после того как электродвигатель достигнет частоты вращения, "близкой к нормальной, сопротивление пускового реостата целиком выводят, обмотки закорачивают и двигатель продолжает работать как короткозамкнутый
Для насосов с горизонтальным валом отечественной промышленностью в настоящее время выпускаются асинхронные электродвигатели с короткозамкнутым ротором единой серии 4А мощностью 0,06-400 кВт при д>3000 мин-1 и высоте оси вращения 50-355 мм. Электродвигатели мощностью 0,06-0,37 кВт изготовляются на напряжение 220 и 380 В; 0,55-11 кВт- на 220, 380 и 660 В; 15-110 кВт- на 220/380 и 380/660 В; 132-400 кВт- на 380/660 В.
Для привода вертикальных насосов выпускаются асинхронные электродвигатели с короткозамкнутым ротором серии ВАН мощностью 315-2500 кВт, напряжением 6 кВ и номинальной частотой вращения 375-1000 мин"1.
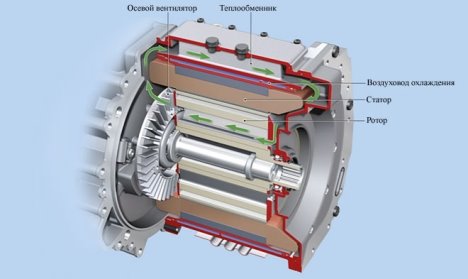
Изготовляются электродвигатели серии ВАН в вертикальном подвесном исполнении с подпятником и двумя направляющими подшипниками (один из которых расположен в верхней крестовине, другой — в нижней), с фланцевым концом вала для присоединения к насосу Вентиляция электродвигателя осуществляется по разомкнутому циклу напором воздуха, создаваемым вращающимся ротором и вентиляторами Холодный воздух поступает в машину снизу из фундаментной ямы через нижнюю крестовину и сверху через окна в верхней крестовине Нагретый воздух выбрасывается через отверстия в корпусе статора
Асинхронные электродвигатели основного исполнения имеют различные модификации, в частности: с повышенным пусковым моментом; с повышенными энергетическими показателями для насосных агрегатов с круглосуточной работой, при которой особое значение имеет повышение КПД; с фазным ротором, облегчающим условия пуска и т. п.
Отечественной промышленность J также выпускаются многоскоростные асинхронные электродвигатели, позволяющие изменением частоты вращения регулировать подачу и напор насоса, улучшая, тем самым, технико-экономические показатели насосной станции в целом. Так, например, двухскоростные электродвигатели серии ДВДА имеют интервал значений мощности от 500/315 до 1600/1000 кВт. Эти электродвигатели переводятся с одной частоты вращения на другое отключение одной обмотки статора с последующим включением другой.
Синхронные электродвигатели переменного тока применяются для привода мощных насосов, характеризуемых большой продолжительностью работы. Частота вращения синхронных электродвигателей связана постоянным отношением с частой сети переменного тока, в которую эта машина включена: ря=:3000 (где р - число пар полюсов; п - частота вращения)
Ротор синхронной машины отличается от ротора асинхронной наличием рабочей обмотки для создания постоянного магнитного поля, взаимодействующего с вращающимся магнитным полем статора Рабочая обмотка ротора запитывается постоянным током от возбудителя, которым может служить либо генератор постоянного тока, либо тиристорный возбудитель Генератор постоянного тока может располагаться отдельно от электродвигателя или крепиться на валу ротора
Во втором случае генератор выполняется с самовозбуждением тиристорный возбудитель всегда располагается отдельно от электродвигателя
Основные преимущества синхронного электродвигателя перед асинхронным следующие:
синхронный электродвигатель может работать с коэффициентом мощности (coscp), равным единице и даже опережающим, что улучшает коэффициент мощности сети и, следовательно,
экономит электроэнергию,
Основным недостатком синхронных электродвигателей является то, что момент на их валу при пуске равен нулю, поэтому их необходимо раскручивать тем или иным способом до скорости, близкой к синхронной для этой цели большинство современных синхронных электродвигателей имеет в роторе дополнительную пусковую короткозамкнутую обмотку, аналогичную обмотке ротора асинхронного двигателя
Для насосов с горизонтальным валом используют синхронные двигатели общего применения серий СД2, СДН-2, СДНЗ-2 и СДЗ различных типоразмеров, имеющие большой диапазон мощности (132-4000 кВт) и частоты вращения (100-1500 мин-1) при напряжении 380-6000 В.
Для привода вертикальных насосов изготовляются две серии синхронных двигателей трехфазного тока частотой 50 Гц, мощностью 630-12 500 кВт, напряжением 6 и 10 кВ, с опережающим cos ф = 0,9, позволяющим получить от двигателя при работе его в номинальном режиме реактивную мощность в пределах до 40% номинальной. Первая серия двигателей ВСДН 15-17-го габаритов включает машины с параметрами: N=6304-3200 кВт, п = 375-=-750 мин-1. Вторая серия электродвигателей ВДС 18-20-го габаритов включает машины больших мощностей (N=4000-=-12 500 кВт) и меньших частот вращения (п = 2504-375 мин"1).
Серийно выпускаемый вертикальный синхронный электродвигатель серии ВДС (8.3) имеет статор цилиндрической формы, активная сталь которого набрана пакетами из листовой стали и закреплена в станине стяжными шпильками. Ротор двигателя выполнен из литой стали. Полюсы прикреплены к ободу болтами. В верхней крестовине размещены подпятник, верхний направляющий подшипник и маслоохладитель. Эта крестовина является грузонесущей и воспринимает вес всех вращающихся частей агрегата и давление воды на рабочее колесо насоса. В нижней крестовине двигателя установлен нижний направляющий подшипник. Возбудитель двигателя (в данном случае генератор постоянного тока с самовозбуждением) вместе с контактными кольцами насажен на отдельный вал, который имеет фланцевое соединение с валом двигателя. В случае отдельно стоящих возбудителей на валу электродвигателя устанавливаются кольца, с помощью которых возбудитель соединяется с обмотками ротора. Двигатель имеет проточную вентиляцию. Двигатели этого типа мощностью свыше 4000 кВт выполняются с замкнутой системой вентиляции и охлаждением воздуха с помощью охладителей.
Обозначение электродвигателей этого типа включает данные об их габаритах. Так, например, марка двигателя, изображенного на 8.3, означает: вертикальный (В) двигатель (Д) синхронного типа (С) с диаметром расточки статора 325 см, длиной сердечника статора 44 см и числом полюсов 2р=16.
Напряжение приводного двигателя принимают в зависимости от его мощности и напряжения сети энергосистемы, к которой подключена насосная станция.
Если питание насосной станции осуществляется от энергосети напряжением 3,6 или 10 кВ и мощность электродвигателей превышает 250 кВт, то следует устанавливать двигатели на том же напряжении. В этом случае отпадает необходимость сооружения понизительной трансформа-горной подстанции и, следовательно, уменьшаются затраты по сооружению насосной станции. Напряжение электродвигателей мощностью 200-250 кВт определяется схемой электропитания и условиями перспективного увеличения их мощности. Электродвигатели мощностью до 200 кВт следует принимать низковольтными, напряжением 220, 380 и реже 500 В.
В зависимости от особенностей среды производственных помещений водопроводных и канализационных насосных станций в них устанавливают электродвигатели в том или ином конструктивном исполнении.
Электродвигатели, устанавливаемые в помещениях с нормальной средой, обычно принимают в защищенном исполнении. Электродвигатели, устанавливаемые на открытом воздухе, следует принимать в закрытом исполнении, для низких температур - во влагоморозостойком. При установке приводных электродвигателей в особо сырых местах их принимают в капле- или брызгозащищенном исполнении с влагостойкой изоляцией. Исполнение электродвигателей, устанавливаемых во взрывоопасных помещениях, должно приниматься в соответствии с Правилами устройств электроустановок (ПУЭ).
ООО "СЗЭМО "Электродвигатель" поставляет широкий спектр электродвигателей для насосного оборудования российского и зарубежного производства: герметичные, погружные, для водоснабжения, для жидкостей с посторонними включениями, для нефтепродуктов, для химической промышленности, насосы для поддержания пластового давления в скважине, нефтяные магистральные насосы, насосы для энергетической промышленности, насосы типа Д, КсВ, ПЭ, АВз, ЭЦВ.
Для правильного подбора электродвигателя для насосного оборудования просим сообщить нам полные характеристики насоса, включая: перекачиваемую среду, ее температуру, расход, напор, место установки, специфические особенности установки, варианты исполнения двигателя. В разделе "Контакты" нашего интернет ресурса Вы сможете оставить заявку на поставку электродвигателя для насосного оборудования и насосных станций. Мы постараемся в кратчайшее время подобрать необходимое Вам оборудование и подготовить технико-коммерческого предложения на поставку.
www.szemo.ru
Известно, что циркуляционные насосы имеют небольшое потребление электроэнергии. Тем не менее эксплуатируются они круглый год, – и «набегает» немало. Существуют два способа снижения расходов: можно повысить КПД насоса или путем электронного регулирования частоты вращения оптимизировать постоянно меняющиеся потребности системы. Оба они нашли применение: в циркуляционных насосах с электронным регулированием числа оборотов, асинхронными и синхронными двигателями, с постоянным магнитом. Преимущество насосов с электронным регулированием числа оборотов и асинхронными двигателями – в экономии электроэнергии при длительной и надежной эксплуатации по сравнению с нерегулируемыми насосами, об этом известно давно. В системе отопления они в автоматическом режиме отслеживают изменение расхода теплоносителя и нужным образом корректируют свою работу, согласовывая мощность электродвигателя с параметрами нагрузки системы. Несмотря на то, что насос со встроенной системой регулирования обойдется потребителю дороже насоса без указанной системы, за весь срок службы общие расходы на эксплуатацию и техническое обслуживание у регулируемого прибора окажутся ниже. Но такие насосы обычно имеют асинхронный двигатель, недостатки которого – значительный пусковой ток и невозможность плавного изменения скорости вращения, так как скорость вращения магнитного поля зависит от частоты тока. По технологическим и ценовым критериям снижение потребляемой мощности регулируемых насосов с классическими асинхронными двигателями невозможно. Необходимость снижения затрат на электроэнергию привела к созданию насосов с синхронными двигателями. Принципиальное отличие синхронного двигателя от асинхронного – в исполнении ротора. У синхронного двигателя - это магнит, выполненный при относительно небольших мощностях на базе постоянного магнита. Поскольку разноименные полюсы магнитов притягиваются, то вращающееся магнитное поле статора, которое можно интерпретировать как вращающийся магнит, увлекает за собой магнитный ротор, причем их скорости равны. В асинхронных машинах скорость вращения ротора несколько меньше скорости вращения поля. Это и объясняет название таких двигателей. Положительные свойства синхронных двигателей с постоянными магнитами – высокая стабильность скорости вращения в синхронном режиме, сравнительно высокие энергетические показатели, повышенная перегрузочная способность, большая удельная мощность на единицу массы, хорошая синфазность вращения. Основной недостаток – сложность пуска, при котором нужно раскрутить ротор в сторону вращения магнитного поля, создаваемого статором. Именно поэтому подавляющее большинство синхронных двигателей запускаются как асинхронные, для чего снабжаются пусковой обмоткой. В момент пуска двигатель работает как асинхронный, а когда скорость ротора приближается к скорости вращения поля, ротор синхронизируется, и далее уже двигатель работает по этой схеме. Однако, в отличие от двигателей с электромагнитным побуждением, постоянные магниты на время пуска невозможно «отключить». Поэтому в процессе разгона магнитный поток от них индуцирует в обмотке статора ЭДС, под действием которой по обмотке через источник протекает ток. Взаимодействуя с полем постоянного магнита, он создает момент по своей природе аналогичный асинхронному моменту, развиваемому пусковой обмоткой. Этот момент – не движущий, а тормозящий. При увеличении тормозного момента, действующего на ротор, уменьшается число оборотов, приводя к увеличению ЭДС, возникающей в обмотке ротора, магнитного поля ротора, и крутящего момента при любой постоянной скорости вращения. Энергия, необходимая для приведения двигателя в действие, обеспечивается за счет магнитов, установленных в роторе, а не только за счет электропитания. Наряду с хорошим качеством регулирования, синхронный двигатель позволяет получить более высокий КПД, как при полной, так и частичной нагрузке. Принцип нашел применение в циркуляционных насосах с мокрым ротором Grundfos, Wilo, Сalpeda. Инновационные методы, включающие в себя производство магнитов под высоким давлением, лазерную сварку и уникальный процесс намагничивания, позволили получить требуемые результаты. А применение передовой электроники, полнофункционального программного обеспечения и современных методов производства гарантируют их длительный срок службы и высокоэффективную эксплуатацию. Принцип их работы, устройство и возможности рассмотрим на насосах NC фирмы Сalpeda. Это – технология электронной коммутации двигателя с ротором на постоянных магнитах. Двигатель не блокируется, так как: - ?рабочие характеристики синхронного двигателя позволяют увеличивать зазор между ротором и камерой-статором, что в асинхронных двигателях невозможно без снижения КПД; - ?ротор выполнен из керамики и менее подвержен образованию известняковых наростов, чем традиционный металлический; -? электроника прибора в состоянии определить возникновение затруднений во вращении двигателя: в такой ситуации электронный блок несколько раз «пробует» запустить двигатель с пиковым моментом вращения, на порядок большим, чем у традиционных двигателей; -? запатентованная «квадратная камера» исключает возможность остановки ротора. Есть у таких насосов и другие плюсы. Постоянная скорость двигателя позволяет ограничить перепады давления при изменении уровня потерь давления. Кроме того, работа насосов Сalpeda не зависит от температуры и напряжения в сети. Традиционные насосы могут работать в данном режиме, но для этого используется очень сложная и дорогостоящая электроника. Надежная электроника обеспечивает режим работы электронасоса с двигателем по классу нергоэфективности «А», а двойная электрическая изоляция – максимальную безопасность. Низкая рабочая температура двигателя позволяет использовать материалы, обеспечивающие высокую электроизоляцию, предотвращая опасность вредной электрической дисперсии, присутствующей в традиционных насосах. Повышенный КПД снижает потребление тока и, следовательно, уменьшает расход электроэнергии. Следовательно, экономия гарантирована примерно на 49 % по сравнению с традиционными насосами.
www.stroymart.com.ua

Сложно себе представить функционирование каких либо промышленных отраслей без использования электрической энергии. Абсолютно все промышленные отрасли являются потребителями электрической энергии.
Более того, большую часть всей производимой электроэнергии потребляют именно промышленные объекты. И одним из крупнейших секторов в этой области является направление (или отрасль) связанная с насосным оборудованием. В частности, для работы насосов, компрессоров и других подобных механизмов обязательно необходимо обеспечение подачи электроэнергии. Управление электродвигателем насосов в насосных станциях осуществляется по определенной схеме, которая призвана оптимизировать работу системы.Использование насосных установок характерно для предприятий машиностроения, металлообработки, водоснабжения и пр. С их помощью осуществляется перегон жидкостей: воды, эмульсии, составов для пропитки, лакокрасочных материалов.
Центробежные и поршневые насосы

Чаще всего используются центробежные насосы. Механизм работы такой системы следующий: двигатель вращает колесо и направляет жидкость в центр, где расположен трубопровод, а центробежная сила «выбрасывает» жидкость через задвижку из корпуса. С помощью созданного эффекта разряжения жидкость движется непрерывно и равномерно. Когда насос заполнен водой или другой жидкостью, его необходимо запустить приводным двигателем. Существует три способа пуска: при закрытой и открытой задвижке, а также пуск с запуском привода напорной задвижки.Помимо центробежных насосов в промышленных отраслях находят применение поршневые насосы. Этот тип насоса подходит для работы с жидкостями, которые необходимо поднять на большую высоту. Поршневой насос характеризуется неравномерной работой и пульсирующей нагрузкой на валу. Жидкость во время работы поршневого насоса течет неравномерно. Для того, чтобы сгладить пульсации и сделать ход более равномерным, специалисты используют маховик на валу и несколько цилиндров.
Что питает насосы
Систему электропривода для работы насоса необходимо выбирать тщательно, так как от нее зависит работа всего механизма. Основные особенности, которыми характеризуются насосные станции, — длительный режим работы, постоянная нагрузка. Если насосные агрегаты не предусматривают электрическое регулирование скоростного режима и требуют для работы небольшую мощность, для их функционирования применяется электродвигатель асинхронный с короткозамкнутым ротором. Если привод насоса требует мощности 100кВт и более, то необходимы двигатели синхронного и асинхронного типа, работающие от полного напряжения сети.Соединение электродвигателя у тихоходного поршневого насоса осуществляется с помощью зубчатой или клинкерной передачи. Насосы центробежного типа отличаются быстроходностью, то есть их необходимо соединять с валом напрямую, а двигатель должен обладать высокой угловой скоростью. В случае работы с центробежным насосом важную роль играет угловая скорость. От этого параметра зависят напор, производительность, мощность, момент на валу.Для работы насосной установки необходимо функционирование контактора, промежуточного реле, пускателя, универсального переключателя. Кроме перечисленной выше аппаратуры обязательны реле, отвечающие за контроль количества жидкости, давление, заливку центробежного насоса и струйные реле. Простейший насосный агрегат может работать в автоматическом и ручном режиме управления. Выбирается режим путем переключения рукоятки. Отключает и включает насос оператор. Он же отвечает за количество жидкости, загруженной в резервуар.
Электродвигатели синхронного и асинхронного типа
Электродвигатели переменного тока особенно популярны для организации работы насосов различного типа в силу их компактной конструкции, простоте в установке и эксплуатации, а также возможности автоматизировать управление при низких материальных затратах. Однако приводные электродвигатели, которые производятся с целью работы на насосных агрегатах, должны обладать определенными критериями. Основная необходимая характеристика – возможность пуска двигателя при условии большой нагрузки. Система работы двигателя должна предусматривать возможность его долгого вращения в обратную сторону. Это необходимо для правильной работы системы во время слива воды в случае остановки насоса в аварийном или плановом режиме.Хорошо, если электродвигатель предусматривает частые повторные пуски, тогда энергетические системы будут работать в хороших условиях. Особенно это необходимо для насосных станций с большой мощностью. Однако в этом случае обмотка статора и пусковая обмотка должны быть повышенного качества, так как от их конструктивных особенностей и от степени нагревания зависит длительность паузы и возможное количество пусков за конкретное время.Как говорилось ранее, для работы насосных станций могут применяться как синхронные, так и асинхронные двигатели. Основная характеристика вторых – постоянная частота вращения в магнитном поле статора, зависимая от количества парных полюсов и частоты сети. Большая популярность асинхронного двигателя связана с простотой обращения с ним и невысокой цене. Тип обмотки ротора определяет еще одну характеристику: имеет ли он короткозамкнутый или фазный ротор.В случае работы с маленьким насосом лучше использовать электродвигатель асинхронный короткозамкнутый. Они выигрывают по стоимости по сравнению с другими типами электродвигателей, а преобразователь частоты в них работает значительно проще. Управлять автоматически всеми агрегатами насосной станции можно с помощью прямого асинхронного пуска. Однако при установки асинхронного электродвигателя необходимо учитывать, что при работе частотника есть угроза кратности пускового тока. Если мощность двигателя колеблется между 0,6 и 100 кВт, а показатель п=750Н и более мин»‘, то пусковой ток будет больше номинального в 7 раз максимум. Кратковременные толчки тока не приводят к проблемам с двигателем, однако есть вероятность воздействия на другие потребители энергии, которые работают от этой же сети. Это дает возможность ограничить номинальную мощность двигателя асинхронного типа, которые запускается методом прямого включения, до 100 кВт. В любом случае этот показатель будет зависеть от сетевой мощности.Фазный ротор более дорогой и имеет более сложные конструктивные особенности. Это обусловлено соединением обмоток ротора с пусковым реостатом, находящимся снаружи, с помощью трех контактных колец с щетками. Для того, чтобы запустить данный электродвигатель, необходимо ввести дополнительное сопротивление реостатом с целью уменьшить силу пускового тока. Как только частота вращения двигателя начнет увеличиваться, сопротивление будет уменьшаться. Основная цель: достичь нормальной частоты вращения, чтобы вывести реостат и укоротить обмотки. Так, двигатель станет короткозамкнутым. Насосы, имеющие горизонтальный вал, работают с помощью асинхронных электродвигателей, выпускаемых в рамках серии 4А. Для вертикальных насосов подходит серия асинхронных электродвигателей ВАН.

Серия ВАН предусматривает подвесные вертикальные электродвигатели, имеющие подпятник и направляющие подшипники, фланцевый конец вала, служащий присоединяющим к насосу элементом. Электродвигатель вентилируется путем движения напора воздуха по циклу. Воздух образуется благодаря вращению ротора и вентиляторов. Воздух попадает в инвертор и другие элементы электродвигателя с нижней и верхней сторон. Снизу для этого приспособлена фундаментная яма, а сверху – окна. Корпусные отверстия служат для выброса нагретого воздуха. Модификации асинхронного электродвигателя могут различаться в зависимости от внутренних особенностей. В частности это может быть повышенный пусковой момент, энергетические показатели (частотники с высоким КПД предназначаются для насосов, работающих круглосуточно), наличие фазного ротора, упрощенных условий пуска.
На рынке предлагаются также асинхронные электродвигатели с возможностью обеспечения различных скоростей. С их помощью может регулироваться напор воды в насосе, ее подача. Для этого необходимо изменять частоту вращения. Для насосной станции использование такого электродвигателя – это очевидная выгода, так как и технические, и экономические показатели значительно улучшаются. Примером такого типа электродвигателей являются серия ДВДА с двумя скоростями. Мощности колеблются между 500/315 и 1600/1000 кВт. Для того, чтобы изменить частоту вращения, необходимо отключить одну обмотку статора и включить другую.Для работы насосов высокой мощности необходимы синхронные электродвигатели. Они способны обеспечить продолжительную бесперебойную работу системы. Частота вращения такого типа электрического двигателя находится в прямой зависимости от частоты включенной сети переменного тока. Одно из различий между синхронным и асинхронным двигателем состоит в том, что ротор синхронного имеет рабочую обмотку, что позволяет создать постоянное магнитное поле, которое взаимодействует с магнитным полем статора, осуществляющим вращение. Питание рабочей обмотки осуществляется за счет работы возбудителя и создания постоянного тока. В качестве возбудителя может выступать генератор тока, размещенный на валу или отдельно от двигателя. В случае расположения вне электродвигателя генератор самовозбуждается.
Какой электродвигатель лучше?
Чаще всего для обеспечения работы насосов и насосных станций отдается предпочтение именно синхронному электродвигателю. Его преимущества заключаются в возможности работы с высоким коэффициентом мощности. Так, коэффициент мощности сети также становится лучше, что позволяет сэкономить на энергозатратах. Часто в сети могут происходить колебания напряжения, что для синхронного двигателя не является большой проблемой. В ходе колебаний может лишь снижаться напряжение до 0,6 на короткое время. Но у синхронных двигателей есть и небольшие недостатки. Самый существенный – это момент на валу во время пуска, приближающийся к нулю. Для того, чтобы начать работу, электродвигатель раскручивается различными способами для достижения синхронной скорости. Для увеличения скорости сегодня используются коротко-замкнутые обмотки. Такие же используются и для работы ротора на асинхронном двигателе.На насосы, имеющие горизонтальные валы, устанавливаются двигатели синхронного типа серий СДЗ, СДНЗ-2, СДН-2, СД2. Их мощность варьируется от 132 до 4000 кВт при частоте вращения от 100 до 1500. Значения возможного напряжения обычно указываются в диапазоне от 380 до 6000 В. Вертикальные насосы работают с помощью синхронных двигателей с тремя фазами тока. Их рабочие характеристики обычно следующие: частота 50 Гц, мощность от 630 до 12,5 тыс кВт, напряжение 10 кВт,Установка необходимого типа электродвигателя находится в тесной зависимости от показателей напряжения сети, а также мощности электрического двигателя. В случае показателя напряжения 3,6/10 кВт, и мощности более 250 кВт, двигатель должен иметь аналогичный уровень напряжения. Тогда Вам не нужно будет устанавливать специальную трансформаторную подстанцию для снижения напряжения, а значит и стоимость возведения насосной станции снизится.Конструктивное исполнение электрического двигателя также зависит от отдельных аспектов водопроводной системы, канализационного пути и производственных помещений в целом. Защищенная конструкция электродвигателя требуется для нормальной среды. Расположение на открытом пространстве обязывает использование закрытой конструкции, если насосная станция работает при низкой температуре, то исполнение электродвигателя должно быть морозо- и влагостойким.
a-eng.ru
| Abstract: | Актуальность работы: Возрастающие технологические требования к качеству производственных процессов, связанных с перекачкой невязких жидкостей, указывают на необходимость улучшения режимов работы установок перекачки жидкости с центробежными насосами, в том числе и с помощью математического моделирования. Установки центробежных насосов, как правило, моделируются с помощью обобщенных интегральных характеристик, не позволяющих исследовать поведение системы в динамических режимах работы. В то время как именно рассмотрение динамических моделей установок центробежных насосов, входящих в состав электротехнических комплексов, позволяет реализовать наиболее эффективные режимы работы, как с точки зрения энергосбережения, так и надежности. Станции перекачки жидкости, в силу технологических процессов, обладают одним из самых высоких потенциалов применения энерго- и ресурсосберегающих технологий, что согласно Указу президента РФ от 4 июня 2008 года № 889, Федеральному Закону РФ № 261 и Энергетической стратегии России на период до 2030 года представляет одно из направлений развития страны, выявляет актуальность данной темы. Цель работы: Выявить законы частотного управления установок центробежных насосов, при которых достигается минимум потерь в силовом канале преобразования энергии, разработать методику построения вольтчастотных характеристик. Методы исследования: методы частотного электропривода и электрических машин, методы операционного исчисления, теории численных методов решения нелинейных систем дифференциальных уравнений, методы теории гидравлики, теории центробежных лопастных машин. Использовалось следующее прикладное программное обеспечение Maple, MatLab/Simulink. Результаты: Исследованы с помощью численных экспериментов характеристики установок центробежных насосов. Разработана методика построения регулировочных вольт-частотных характеристик при скалярном частотном управлении асинхронного электродвигателя, в зависимости от режимов работы внешней гидросети центробежного насоса.Relevance of the research: Increasing technological requirements to the quality of production processes associated with non-viscous liquid pumping indicate the need to improve the operating conditions of liquid transfer systems with centrifugal pumps, including the improvement with the help of mathematical modeling. Installations of centrifugal pumps are modeled as a rule using the generalized integral characteristics which do not allow studying the behavior of the system under dynamic operating conditions. While, this consideration of dynamic models of centrifugal pump units included in the electrical systems allows realizing the most efficient modes of operation, both in terms of energy efficiency and reliability. Fluid pumping stations, due to technological processes have one of the highest potential of applying energy-saving technologies that is one of the areas of the country development and it reveals the relevance of the topic according to the presidential decree of June 4, 2008 № 889, the Federal Law of the Russian Federation № 261, and the Energy Strategy of Russia for the period up to 2030. The main aim of the study is to determine the frequency steering laws of centrifugal pump installations at which the minimum losses in the power conversion channel occur and to develop the methodology for constructing voltage-frequency characteristics. The methods used in the study: frequency electric drive and electric machines methods, methods of operational calculus, the theory of numerical methods for solving nonlinear systems of differential equations, methods of the theory of hydraulics, theory centrifugal machines. The authors used Maple, MatLab / Simulink. The results: The authors investigated characteristics of centrifugal pump installations by means of numerical experiments, developed the technique of constructing the adjustment of voltage- frequency characteristics with scalar frequency control of asynchronous motor depending on operation modes of external drainage system. |
earchive.tpu.ru
Изобретение относится к области электротехники, а именно к конструкции асинхронного двигателя (АД) с герметичным электронасосом для перекачки жидкости. В АД обычного исполнения ротор с валом выполнен в виде массивного толстостенного цилиндра, торцы которого герметично закрыты торцевыми фланцами, закрепленными на валу и образующими вместе с массивным цилиндром и валом герметичную полость ротора, соединенную посредством отверстий в стенках полых концов вала с всасывающей и нагнетающей сторонами электронасоса. В средней части полости ротора на валу укреплено рабочее колесо, которое, вращаясь вместе с ротором и его валом, перекачивает жидкость внутри полости ротора со стороны всасывания в сторону нагнетания, являясь рабочим звеном герметичного электронасоса. Если АД реверсивный, то насос тоже реверсивный и может работать в любом из двух направлений. Техническим результатом является создание совмещенной конструкции АД и герметичного электронасоса с высокими эксплуатационными свойствами. 1 ил.
Изобретение относится к области электротехники, в частности к конструкции асинхронного двигателя с герметичным электронасосом для перекачки жидкостей.
Известны два основных типа конструктивного исполнения герметичных электронасосов, в которых используются трехфазные асинхронные двигатели (АД) соответствующей конструкции [1]. Известен тип герметичного электронасоса, у которого полость статора его АД изолирована от перекачиваемой жидкости - экранированные электронасосы. Соответственно такие АД называют асинхронными двигателями экранированных электронасосов (АД ЭЭН) или просто экранированными АД. Они имеют наибольшее число особенностей, принципиально отличающих их от АД общего назначения, что вносит существенные отличия и затруднения в их расчет, изготовление и эксплуатацию.
Известна конструкция АД ЭЭН, выбранного в качестве прототипа, у которого полость статора с его обмоткой и короткозамкнутая обмотка массивного ротора герметизируются тонкостенными экранами из немагнитной стали, зазор между которыми заполнен циркулирующей перекачиваемой жидкостью [2]. Известная конструкция АД ЭЭН имеет ряд существенных недостатков. Такой АД является лишь частью моноблочного агрегата, включающего еще гидравлическую часть и устройства охлаждения. Наличие защитных экранов статора и ротора требует на их изготовление расхода специальной немагнитной стали, а также дополнительной работы на их изготовление и установку. Лобовые части обмотки статора в торцевой зоне АД ЭЭН окружены массивными стальными конструктивными элементами. Немагнитная сталь экранов имеет относительно высокое удельное электрическое сопротивление и в них выделяется значительное количество тепловой энергии. Сердечник его массивного ротора, выполненный не из электротехнической стали, также создает дополнительные потери. В защитных экранах и на трение ротора о жидкость в зазоре теряется 10-15% энергии, подведенной к АД. Потери в массивных элементах торцевой зоны снижают КПД двигателя больше чем на 1,5%. В результате большой величины всевозможных потерь АД имеет относительно низкий КПД, не превышающий 70%. Относительно большой зазор между расточкой статора и ротором (до 4 мм), необходимый для установки двух экранов, требует большой величины МДС обмотки статора, что приводит к большому значению тока статора, а также к большой величине потоков рассеяния и, как следствие, к низкому значению коэффициента мощности cosφ.
Цель изобретения - создать конструкцию трехфазного АД, способного одновременно выполнять функцию герметичного электронасоса и обладать высокими электромагнитными и эксплуатационными свойствами.
Указанная цель достигается следующим образом: статор АД обычной конструкции, его трехфазная обмотка создает вращающееся магнитное поле, в котором вращается массивный ротор. Массивный ротор АД выполнен полым в виде массивного толстостенного цилиндра из маломагнитного сплава [3]. Толщина стенки массивного цилиндра определяется глубиной проникновения основного поля статора в сердечник ротора при рабочей частоте вращения ротора. Торцы массивного цилиндра герметично закрыты фланцами, укрепленными на валу ротора. Фланцы выполнены из металла с низким удельным электрическим сопротивлением и одновременно выполняют роль короткозамыкающих колец для уменьшения поперечных токов массивного цилиндра и уменьшения их потерь. С этой же целью должно быть большим отношение длины массивного цилиндра к полюсному делению (1/τ>2) [4]. Внутренний диаметр массивного цилиндра и его длина, а значит объем полости ротора, определяются объемом перекачиваемой жидкости. Концы вала тоже полые, их стенки имеют отверстия, через эти отверстия и полости вала полость ротора соединяется с внешним пространством. Внутри полости ротора на валу закреплено рабочее колесо, имеющее диаметр полости ротора. Массивный цилиндр и торцевые фланцы ротора одновременно служат герметичным корпусом электронасоса, внутри него находится рабочее колесо, которое при вращении ротора будет перегонять жидкость внутри полости ротора со стороны всасывания в сторону нагнетания. Т.е., когда ротор вращается, он одновременно выполняет функцию герметичного электронасоса, так что электронасос и его АД представляют собой единый агрегат. Таким образом, заявляемая конструкция АД герметичного электронасоса соответствует критерию изобретения «новизна». Сравнение заявляемого решения не только с прототипом, но и с другими техническими решениями в данной области техники позволяет сделать вывод о соответствии критерию «существенные отличия».
Сущность изобретение поясняется чертежом, на котором схематически представлена конструктивная схема АД с герметичным электронасосом. АД имеет статор 1 обычной конструкции, отделенный от массивного ротора обычным воздушным зазором 2. Его массивный ротор полый, он представляет собой массивный толстостенный цилиндр 3 из маломагнитного сплава. Торцы массивного цилиндра герметично закрываются фланцами 4, укрепленными на валу 5, выполненными из метала с малым удельным электрическим сопротивлением. Массивный цилиндр 3, торцевые фланцы 4 и вал 5 образуют герметичную полость насоса 6, в средней части которой на валу ротора 5 закреплено рабочее колесо насоса 7. Концы вала 5 тоже имеют полости 8, в стенках которых имеются отверстия 9. Через отверстия 9 и полости вала 8 герметичная полость ротора 6 соединяется с внешним пространством со стороны всасывания и со стороны нагнетания. При вращении ротора под действием вращающегося поля статора рабочее колесо внутри полости ротора, вращаясь вместе с валом, будет перекачивать (перегонять) жидкость из полости ротора со стороны всасывания в полость со стороны нагнетания. Направление движения жидкости внутри полостей вала и ротора указано на чертеже стрелками. Таким образом, при вращении ротор одновременно выполняет роль осевого горизонтально герметичного электронасоса.
Кроме того, массивный ротор из маломагнитного сплава имеет повышенное электрическое сопротивление, поэтому АД обладает повышенным пусковым моментом, пониженными пусковым и рабочим токами и допускает практически неограниченное число прямых пусков. Обе половины агрегата со стороны всасывания и со стороны нагнетания совершенно одинаковы, поэтому при реверсивном АД насос тоже будет реверсивным, т.е. можно изменять направление вращения ротора и соответственно направление движения жидкости на противоположное.
Использование АД с полым массивным ротором, выполняющим функцию герметичного электронасоса, позволяет получить единый компактный агрегат сравнительно простой конструкции и уменьшенных габаритов, что снижает его массу и повышает его производительность и эксплуатационные свойства. Отсутствие всевозможных специфических потерь энергии и полей рассеяния значительно повышает КПД и коэффициент мощности cosφ АД и его насос могут работать в реверсивном режиме. Конструкция АД проще конструкции АД ЭЭН, он имеет меньшую металлоемкость и меньшие трудозатраты при изготовлении. АД с массивным ротором из немагнитного сплава имеет повышенный пусковой момент, пониженные пусковой и рабочий токи, и допускает практически неограниченное число прямых пусков в обоих направлениях.
Источники информации
1. Васильцов Э.А., Невелич В.В. Герметические электронасосы. - М: Машиностроение, 1968.
2. Поклонов С.В. Асинхронные двигатели герметичных электронасосов. - Л: Энергопромиздат, 1987.
3. Могильников B.C. Асинхронные электродвигатели с массивными и двухслойными роторами. ВМФ, 1976.
4. Середа В.П. Исследование распределения токов в гильзе двухслойного ротора асинхронной машины. Сб-к научных трудов Даг. НИОЭ, Махачкала, 1974. Вып.4, стр. 175-181.
1. АД с герметичным электронасосом для перекачки жидкости имеет статор обычного исполнения, создающий вращающееся магнитное поле, обычный воздушный зазор и массивный ротор из маломагнитного сплава, отличающийся тем, что с целью создания конструкции АД, способного одновременно выполнять функцию герметичного электронасоса и обладающего высокими электромагнитными и эксплуатационными свойствами, ротор АД выполнен полым в виде полого массивного толстостенного цилиндра, образующего вместе с торцевыми фланцами, укрепленными на валу, герметичную полость-корпус насоса, в середине которой на валу укреплено рабочее колесо насоса, имеющее диаметр внутренней полости массивного цилиндра. При вращении ротора рабочее колесо перегоняет жидкость внутри полости ротора со стороны всасывания в сторону нагнетания, т.е. ротор работает как осевой горизонтальный герметичный насос.
2. Способ перекачки жидкости по п. 1, отличающийся тем, что при реверсивном АД насос работает как реверсивный одинаково в обоих направлениях.
www.findpatent.ru
 Для того чтоб избрать тип и мощность электронасосной установки, нужно исходя из местных критерий решить вопрос о схеме водоснабжения. Подачу воды производят в главном через водонапорный котел либо водонапорный бак с приводом центробежных насосов от асинхронных движков.
Для того чтоб избрать тип и мощность электронасосной установки, нужно исходя из местных критерий решить вопрос о схеме водоснабжения. Подачу воды производят в главном через водонапорный котел либо водонапорный бак с приводом центробежных насосов от асинхронных движков.
Конкретная подача воды от насоса в распределительную сеть осуществляется в открытых ирригационных системах с приводом от асинхронных движков.
Для принятой схемы водоснабжения выбирают насос (почти всегда надежный и обычный в эксплуатации насос центробежного типа).
Для выбора насоса и определения его мощности по водопотреблению определяют требуемые подачу и напор.
Подачу Qн (л/ч) насоса находят из последующего соотношения:
Qн = Qmaxч = (kч х kсут х Qср.сут ) / (24 η),
где Qmaxч — вероятный наибольший часовой расход воды, л/ч, kч — коэффициент неравномерности часового расхода, kсут — коэффициент неравномерности дневного расхода (1,1 — 1,3), η — КПД установки, учитывающий утраты воды), Qср.сут — среднесуточный расход воды, л/сут.
 Напор насоса выбирают таким, чтоб он мог подавать воду при нужном давлении в заданную точку. Требуемый напор насоса Ннтр определяется высотой всасывания Нвс и высотой нагнетания Ннг, сумма которых определяет статический напор Нс, потерями в трубопроводах Hп и разностью давлений на верхнем Рву и нижнем Рну уровнях.
Напор насоса выбирают таким, чтоб он мог подавать воду при нужном давлении в заданную точку. Требуемый напор насоса Ннтр определяется высотой всасывания Нвс и высотой нагнетания Ннг, сумма которых определяет статический напор Нс, потерями в трубопроводах Hп и разностью давлений на верхнем Рву и нижнем Рну уровнях.
Беря во внимание, что напор H = P/ρg, где Р — давление, Па, ρ — плотность воды, кг/м3, g — 9,8 м/с2 — ускорение свободного падения, g — удельный вес воды, к/м3, получаем:
Ннтр = Hc + Hп + (1/ρ) х (Рву — Рну)
Зная требуемые расход и напор, по каталогу выбирают насос подходящих характеристик с учетом вероятной частоты вращения приводного мотора. Дальше определяют мощность электродвигателя насоса.
По универсальной характеристике избранного насоса уточняют его подачу Qн напор Нн и определяют коэффициент полезного деяния ηн и мощность насоса Рн.
Мощность (кВт) мотора привода насоса Pдв = (kз х ρ х Qн х Нн) / (ηн х ηп),
где — kз коэффициент припаса, зависящий от мощности электродвигателя насоса: Р, кВт — (1,05 — 1,7), т.к. в реальных критериях работы насосов могут происходить утечки воды из напорного трубопровода (вследствие неплотностей соединений, разрывов трубопровода и пр, потому электродвигатели для насосов выбирают с неким припасом мощности. Чем больше мощность, тем меньше коэффициент припаса можно принять. Так для мощности электродвигателя насоса 2 кВт — kз = 1,5, 3 кВт — kз = 1,33, 5 кВт — kз =1,2, при мощности больше 10 кВт— kз = 1,05 — 1,1. ηп — КПД передачи (для прямой передачи 1, клиноременной 0,98, зубчатой 0,97, плоскоременной 0,95), ηн — КПД насосов поршневых 0,7 — 0,9, центробежных 0,4 — 0,8, вихревых 0,25 — 0,5.
 Для центробежных насосов в особенности важен верный выбор угловой скорости насоса, потому что его производительность пропорциональна угловой скорости, напор и момент — квадрату угловой скорости, мощность — ее кубу: Q ≡ ω, H ≡ ω2, М≡ ω2, P ≡ ω3
Для центробежных насосов в особенности важен верный выбор угловой скорости насоса, потому что его производительность пропорциональна угловой скорости, напор и момент — квадрату угловой скорости, мощность — ее кубу: Q ≡ ω, H ≡ ω2, М≡ ω2, P ≡ ω3
Из этих соотношений следует, что при увеличении угловой скорости насоса мощность его растет, что может привести к перегреву электродвигателя. При занижении угловой скорости мотора напор насоса возможно окажется недостающим для расчетной подачи.
Выбирая электронасосный агрегат по каталогу, нужно учесть его рабочие свойства (рис. 1) и характеристику магистрали, на которую работает насос, другими словами зависимость меж подачей и суммарным значением напора, требуемого для подъема воды на заданную высоту, преодоления гидравлических сопротивлений и сотворения лишнего давления на выходе из нагнетательного трубопровода. Необходимо стремиться к тому, чтоб рабочая точка А находилась в зоне наибольших значений КПД агрегата.

Рис. 1. Свойства насоса при разных частотах вращения (1, 2, 3, 4), магистрали при разных степенях дросселирования (5, 6) и КПД (7) насоса при номинальной частоте вращения.
Тип электродвигателя выбирают, исходя из условии среды и особенностей монтажа. К примеру, для привода погружных насосов типа ЭЦВ используют электродвигатели мощностью 0,7 — 65 кВт специального выполнения типа ПЭДВ, рассчитанные для работы в буровых скважинах поперечником от 100 до 250 мм с подачей на высоту до 350 м. Обмотка статора мотора выполнена проводом с полихлорвиниловой гидростойкой изоляцией.
Электродвигатель совместно с насосом устанавливается в скважине погруженным в откачиваемую воду (рис. 3). Пример условного обозначения агрегата: ЭЦВ-6-10-80-М, где ЭЦВ-6 — электронасосный скважинный агрегат для воды с чертой «6» по поперечнику скважины, а конкретно — для скважины с внутренним поперечником 149,5 мм, 10 — номинальная подача насоса, м3/ч, 80 — номинальный напор, м, М — вид климатического выполнения по ГОСТ 15150-69.
Условное обозначение электродвигателя, используемого в агрегате: ПЭДВ4-144 (ПЭДВ — погружной электродвигатель водозаполненный, 4 — номинальная мощность, кВт, 144 — наибольший размер в поперечном сечении, мм).

Рис. 2. Электронасосный центробежный скважинный агрегат для воды: 1 — насос, 2 — обойма, 3 — головка, 4 — оборотный клапан, 5 — рабочее колесо, 6 — лопаточный отвод, 7 — муфта, 8 — движок, 9 — верхний подшипниковый щит, 10 — статор, 11 — ротор, 12 — нижний подшипниковый щит, 13 — днище, 14 — пробка, 15 — пробка-фильтр, 16 — шпилька, 17 — сетка, 18 — кожух

Рис. 3. Схема расположения агрегата в скважине: 1 — агрегат, 2 — водоподъемная колона, 3 — датчик «сухого хода», 4 — кабель, 5 — муфта, 6 — опорная плита либо оголовок, 7 — колено, 8 — кран трехходовой, 9 — манометр, 10 — задвижка, 11 — станция управления и защиты, 12 — хомут, 13 — фильтр
 В приводе непогружных центробежных и вихревых насосов употребляют асинхронные короткозамкнутые движки я и движки с фазным ротором с гидростойкой изоляцией мощностью 1,5 — 55 кВт.
В приводе непогружных центробежных и вихревых насосов употребляют асинхронные короткозамкнутые движки я и движки с фазным ротором с гидростойкой изоляцией мощностью 1,5 — 55 кВт.
Погружные электронасосы зависимо от уровня залегания водоносного слоя эксплуатируют на глубинах 40 — 230 м.
Механическая черта центробежного насоса имеет вентиляторный вид. Момент сопротивления трения в подшипниках насоса Мс — 0,05 Мн.
Средний момент поршневого насоса при работе на магистраль, где поддерживается неизменный напор, не находится в зависимости от угловой скорости вращения. Запуск поршневого насоса осуществляется при открытой задвижке на напорном трубопроводе. По другому может произойти катастрофа.
Центробежный насос можно пускать как при открытой, так и при закрытой задвижке на напорном трубопроводе.
С учетом критерий среды, особенностей монтажа, нужной мощности и частоты вращения насоса по справочным таблицам выбирают электродвигатель соответственного типа.
Школа для электрика
elektrica.info
Асинхронные двигатели общепромышленного исполнения наиболее широко используются в приводах переменного тока для производственных механизмов, не требующих регулирования скорости и работающих при длительной нагрузке — мощности, развиваемой электрической машиной в данный момент времени. Она обычно выражается в единицах мощности (кВт, квар, кВ∙А) либо в процентах или долях номинальной мощности.
Применяемый тип асинхронного двигателя во многом определяется условиями пуска рабочего механизма. При легких условиях пуска, т. е. при сравнительно небольшом моменте инерции, и моменте статического сопротивления на валу машины используются обычные короткозамкнутые асинхронные двигатели типов А2, АО2 (А, АО) и др. Такими механизмами можно считать машины с вентиляторным моментом на валу: насосы, вентиляторы (при закрытых задвижках) и т. п. Начальный момент трогания таких механизмов составляет примерно 10—40% номинального. Ориентировочные величины статических нагрузочных моментов на валу двигателей для ряда производственных механизмов приведены в табл. 4.
При тяжелых условиях пуска с начальным пусковым моментом сопротивления, равным номинальному или более, необходимо использовать асинхронные двигатели с повышенным пусковым моментом типа АОП2 (АОП), т. е. двигатели с глубоким пазом, а в наиболее тяжелых условиях — двигатели с двойной клеткой. К таким механизмам относятся глиномялки, плунжерные насосы, дробильные барабаны и др.
Для приводов механизмов с большими маховыми массами, с пульсирующей нагрузкой, с большой частотой пусков и реверсов нашли применение асинхронные двигатели с повышенным скольжением типа АОС2.
Т аблица 4
| Тип механизмов | Статический моментпри ω=0 | Статический момент при ω=0,95ω1 | Максимальный статический моментМ |
| Поршневые компрессоры и насосы (пуск без нагрузки) | 0,25—0,4 | 0,25—0,4 | 1.5 |
| Центробежные насосы | 0,3—0,4 | 0.5—1 | 1.5 |
| Турбокомпрессоры, вентиляторы (пуск с закрытой задвижкой) | 0,2—0,3 | 0,2—0,3 | 1.5 |
| Шаровые мельницы: | |||
| сухого помола | 1—2 | 1 | 2.5 |
| мокрого помола | 0,2—0,5 | 1 | 2 |
| Дробилки (пуск под нагрузкой) | 2 | 1—1,5 | 3 |
| Двигатели-генераторы | 0,1—0,2 | 0,1-0,2 | 2 |
| Конвейеры, транспортеры | 1—1,5 | 1 | 2 |
| Блюминги, слябинги, рельсоба- лочные станы (пуск без нагрузки) | 0,35—0,5 | 0,2—0,3 | 2,5—3,5 |
| Мелкосортные и трубопрокатные станы | 0,6—1 | 0.4 | 2,5 |
| Листовые и жестекатальные станы:холодной прокатки | 2 | 1—1,5 | 2,5 |
| горячей прокатки | 1,25 | 1 | 3-5 |
Примечания: 1. ω — угловая скорость; ω1—угловая скорость вращения магнитного поля. 2. Величины моментов даны в относительных единицах (по отношению к номинальному моменту).
Важное значение для многих производственных механизмов имеет плавность пуска приводного электродвигателя. Для ограничения пускового момента и пускового тока используется искусственное снижение напряжения питания статора двигателя на время пуска. Это достигается за счет включения в цепь статора реактивных и активных сопротивлений (резисторов) или автотрансформатора. Первый способ используется для двигателей малой и средней мощности —для привода кранов, транспортеров, станков и некоторых других механизмов при включении активного сопротивления (резистора) в одну фазу статора. В тех случаях, когда требуется ограничение пускового тока и двигатель должен пускаться вхолостую или с малой нагрузкой на валу, используется схема включения резисторов во все три фазы двигателя (для низковольтных электродвигателей). Более подробно способы пуска двигателей описаны в § 5.
Когда мощность питающей сети недостаточна, для пуска электродвигателей с короткозамкнутым ротором применяются асинхронные двигатели с фазным ротором типов АК2, АОК2 и пусковыми сопротивлениями (резисторами) в цепи ротора.
В ряде отраслей, например в текстильной промышленности, для приводов механизмов с круглосуточным режимом работы, когда важное значение имеют энергетические показатели двигателя (к. п. д. и др.), используются асинхронные двигатели типов АО2-Т, АОЛ2-Т.
Наиболее характерные случаи эксплуатации и области применения асинхронных электродвигателей в нерегулируемых приводах различных механизмов приведены в табл. 5.
Таблица 5
| Характер нагрузки | Применяемые асинхронные двигатели | В каких механизмах используются двигатели |
| Длительная постоянная | Короткозамкнутые типов А2, АО2, А и АО до 100 кВт | Центробежные насосы станций, вентиляторы дымососов, мукомольные мельницы, агрегатные станки, транспортеры |
| Длительная переменная (без маховика) | Короткозамкнутые типов А2, АО2, А и АО или с фазным ротором ти пов АК2, АОК2 | Шаровые и угольные мельницы, дробилки, ка ландры, чесальные машины, поршневые насосы и компрессоры |
| Ударная (с маховиком на валу) | Короткозамкнутые, с повышенным скольжением типа АОС2 до 100 кВт | Молоты, ножницы, кривошипные прессы, прокатные станы, ковочные машины |
| Повторно-кратковременная | Короткозамкнутые, с повышенным скольжением типа АОС2 или с фазным ротором типов АК2, АОК2 | Краны, подъемные механизмы, лифты, механизмы металлургических производств |
В производственных машинах, требующих регулирования скорости с помощью электродвигателя, асинхронные двигатели используются в соответствии с рядом специфических требований. К таким техническим требованиям относятся — диапазон и плавность регулирования скорости, характер изменения нагрузочного момента и др. (более подробно см. § 6). Наиболее характерные примеры применения асинхронных двигателей в регулируемых приводах сведены в табл. 6.
Таблица 6
| Применяемые асинхронные двигатели | Способ регулирования частоты вращения | Зона регулирования | Плавность, диапазон регулирования | В каких производствах и механизмах используются двигатели |
| Коротко-замкнутые | Изменение частоты питающей сети | Вверх — вниз | Плавное регулирование | Вискозная промышленность — центрифуги;текстильная промышленность — прядильные машины; металлургия —роликовые транспортеры прокатных цехов |
| Переключение числа пар полюсов статора | Вверх | Ступенчатое, не более 3:1 | Металлорежущие станки, прессы со ступенчатым регулированием скорости | |
| С фазным ротором | Изменение сопротивления в цепи ротора | Вниз | Плавное при постоянном моменте нагрузки, не более 2:1 | Краны, вспомогательные механизмы в металлургии, насосы и дымососы с регулировкой производительности |
Выбор мощности двигателя
Одним из основных условий выбора электродвигателя является соответствие его мощности производственного механизма, приводимого во вращение. Для предварительного выбора двигателя нужно знать ориентировочные значения статических моментов сопротивления па валу механизма при подсинхронной угловой скорости вращения ротора (ω = 0,95ω1), а также нагрузочный статический момент (см. табл. 4).
Факторами, определяющими выбор двигателя, являются также режим его работы. Различают нагрузки: продолжительную, практически постоянную; длительную переменную; кратковременную; повторно-кратковременную.
Продолжительный режим работы с практически постоянной нагрузкой характеризуется тем, что температура всех частей электродвигателя при неизменной температуре окружающей среды достигает некоторых установившихся значений. Температура охлаждающей среды для электродвигателей нормального исполнения в соответствии с ГОСТ 183-66 не должна превышать 40°С. В случае превышения температуры охлаждающей среды нагрузку электродвигателя необходимо снизить. Для работы в условиях с температурой ниже 40 °С нагрузка двигателей может быть несколько повышена.
Допустимая нагрузка двигателя, соответствующая изменению температуры охлаждающей среды, определяется его конструкцией, главным образом системой и устройством вентиляции, и указывается заводом-изготовителем. Однако для асинхронных двигателей единых серий А, АО, А2 и АО2 можно руководствоваться следующими ориентировочными данными:
| Температура охлаждающей среды, °С | 30 | 35 | 40 | 45 | 50 |
| Изменение нагрузки по отношению к номинальной, % | +10 | +5 | 0 | -8 | -20 |
При нормальной температуре окружающей среды и работе электродвигателя продолжительно с постоянной нагрузкой должно обеспечиваться условие равенства номинальной мощности двигателя Рн (паспортной) и мощности нагрузки Рс (фактической), т. е. Рн ≈ Рс. Длительная переменная нагрузка. В этом случае номинальный, требующийся по условиям перегрузки ток электродвигателя Iн.пер должен быть не менее отношения максимального тока Iмакс к кратности допустимой перегрузки по току mI:
(53)
Iн.пер ≥ Iмакс /mI .
Номинальный ток двигателя, требуемый с точки зрения его нагрева при работе Iн. экв, должен быть не менее эквивалентного фактического тока двигателя I экв, а именно: Iн.экв ≥ I экв .
Величина эквивалентного тока для некоторого графика переменной по току нагрузки (рис. 30,а) может быть найдена из выражения, А:
(54)
|
Паспортная величина номинального тока (А) выбранного электродвигателя должна быть не менее каждой из полученных величин Iн.пер и Iн.экв.
Кроме того, должны обеспечиваться условия работы по моменту на валу электродвигателя:1) для номинального момента, требуемого по условию перегрузки,
(55)
Мн.пер ≥ Ммакс /тм ,
где Ммакс — максимальный необходимый момент на валу двигателя, Н∙м; mм — максимально допустимая перегрузка по моменту;
 |
| Рис. 30. Графики работы асинхронного двигателя. а — режим с переменной нагрузкой по току; б — повторно-кратковременный режим по мощности; в — эквивалентный режим работы. |
2) для номинального момента, требуемого по условию нагрева, Паспортная величина номинального момента выбранного электродвигателя должна быть не менее каждой из полученных величин Мн.пер и Мн.экв. Для асинхронных электродвигателей справедливо соотношение
где λ = Ммакс /Мн — коэффициент перегрузочной способности по моменту (кратность критического момента) может быть предварительно найден из табл. 7.
Кратковременная нагрузка асинхронного короткозамкнутого двигателя. В этом случае выбор мощности двигателя производится с точки зрения возможности его запуска по минимальному моменту Ммин(Н∙м), развиваемому двигателем при пуске, из выражения
(57)
| Mн = | Mcqуск | . |
| qмин qU |
где qмин = Mмин /Мн — кратность минимального момента, развиваемого двигателем при разбеге, по отношению к номинальному моменту; qU = U2мин /U2н — коэффициент, учитывающий возможность понижения рабочего напряжения питания двигателя; Uмин—минимально возможное рабочее напряжение двигателя, В; qуск = 1,15 ÷ 1,25 — коэффициент, учитывающий обеспечение достаточного ускорения при разгоне.
Таблица 7
| Тип асинхронного электродвигателя | Значение λ |
| КороткозамкнутыйС фазным роторомС повышенным скольжениемС двойной клеткой или глубоким пазом | 1,8—22—2,52—31,8—2,7 |
Повторно-кратковременный режим характеризуется периодами работы с постоянной нагрузкой (рабочие периоды) и периодами отключения электродвигателя (паузы). При этом температура отдельных частей машины при неизменной температуре окружающей среды не успевает достигнуть практически установившихся значений. В таком случае выбор электродвигателей осуществляется:
1) из серии двигателей единой серии нормального исполнения. Выбор мощности двигателя ориентировочно производится аналогично случаю длительной перемен¬ной нагрузки. При более точных расчетах необходимо учитывать влияние ухудшения условий охлаждения двигателя [Л. 4];
2) из специальных электродвигателей, предназначенных для работы в повторно- кратковременном режиме (крановые и металлургические двигатели типа МТ, МТК и др.). При этом производится пересчет заданного графика повторно-кратковременного режима (см. рис. 30,б) в некоторый эквивалентный график (рис. 30,в). Рабочая (действительная) мощность нагрузки при повторно-кратковременном режиме Рпк( (Вт) находится из выражения
(58)
|
при рабочем коэффициенте продолжительности включения
(59)
| εпк = | tр | = | t1+ t2 | , |
| tц | tц |
где tp = t1 + t2 — время работы двигателя, с; tx = tx1 + tx2 (см. рис. 30,б, в)—пауза, с; tц = tx + tp—время цикла, с. Для наиболее распространенного случая, когдя 0,4 > εпк > 0,15, можно пользоваться упрощенной формулой для расчета каталожной мощности двигателя Ркат (Вт). При передаче от рабочей продолжительности включения εпк к каталожной εкат
(60)
Ркат = Рпк √εпк /εкат .
В остальных случаях используются значительно более сложные расчеты [Л. 4].
Расчет допустимой частоты включенийАсинхронные короткозамкнутые двигатели, рассчитанные на длительный режим работы, при работе в повторно-кратковременном режиме с большим числом включений в течение определенного времени имеют ограниченное допустимое число включений в час h, которое зависит от фактической нагрузки электродвигателя, от соотношения между временем работы tp(с) и паузы-остановки — tx(с), а также от величии потерь энергии в двигателе за время разбега ΔАр (Дж) и торможения ΔАт (Дж). Эти потери в переходные периоды, когда частота вращения машины меньше номинальной, значительно превышают потери энергии в двигателе при работе с постоянной частотой вращения. Кроме того, при неподвижном роторе в период паузы ухудшается теплоотдача двигателя, что учитывается при расчете введением некоторого коэффициента у. Этот коэффициент зависит от способа вентиляции двигателей и может быть принят следующим: для закрытого двигателя с независимым охлаждением 0,9—1,0; для закрытого двигателя с охлаждением от собственного вентилятора 0,45—0,55; для защищенного двигателя с самовентиляцией 0,25—0,35.
Ограничение по частоте включений двигателя вводится для того, чтобы не допустить чрезмерный перегрев его. Значение h можно определить из следующего выражения, которое используется в основном для двигателей малой мощности до 10—15 кВт:
(61)
| h = 3600 | (Δpн — Δpс )ε + Δpнγ(1 — ε) | . |
| 0.97(ΔAр + ΔAт ) |
где Δрн, Δрс — потери мощности в электродвигателе при номинальной и фактической нагрузках, Вт; ε = tp /(tp + tx ) — коэффициент относительной продолжительности включения. Обозначения и размерности остальных величин в формуле (61) расшифрованы ранее.
При работе асинхронного двигателя с номинальной нагрузкой допустимое число включений в час равно:
(62)
| h = 3600 | Δpнγ(1 — ε) | . |
| 0.97(ΔAр + ΔAт ) |
Допустимая частота включений во многом зависит от момента инерции ротора двигателя. С увеличением мощности двигателя возрастает его момент инерции и величина h уменьшается. Мощность двигателей механизмов с большими статическими моментами сопротивления выбирают больше номинальной мощности механизма для сокращения времени пуска. На практике не рекомендуется использование асинхронных электродвигателей общего назначения для частого пуска механизмов, имеющих приведенный момент инерции значительно больший, чем момент инерции самого двигателя. Так, для короткозамкнутых двигателей при максимально допустимом статическом моменте сопротивления механизма разрешается не более двух пусков подряд из холодного состояния.
Мощность двигателей для привода общепромышленных механизмов
Мощность Р, необходимая для приведения в действие и обеспечения нормальной работы производственного механизма, определяется по его параметрам (например, производительностиQ и др.) и эксплуатационным характеристикам (например, коэффициент полезного действия механизма — η) в соответствии с особенностями того технологического процесса, в котором используется данный механизм. Ниже приводятся формулы для расчета требуемой мощности двигателей ряда наиболее распространенных производственных механизмов.
Мощность двигателя насоса, кВт,
(63)
| P = | γQ(H + ΔH ) | . |
| 102ηηп |
где H — высота напора (сумма высот всасывания и нагнетания), м; ΔН — падение напора в магистралях, м; ηп и η — к. п. д. передачи и насоса; γ — плотность перекачиваемой жидкости, кг/м3; Q — расход жидкости, м3/с.
Мощность двигателя вентилятора, кВт,
где Нc — суммарный напор, Н/м2; ηп и η — к. п. д. передачи и вентилятора; Q — расход воздуха, м3/с
Мощность двигателя компрессора, кВт,
где A’а —адиабатическая работа сжатия 1 м3 атмосферного воздуха до промежуточного давления в компрессоре, Дж/м3; ηп и η — к. п. д. передачи и компрессора; Q — расход воздуха, м3/с.
Мощность двигателя подъемного крана, кВт,
где G и G0 — масса поднимаемого груза и захватывающего устройства, Н; v — скорость подъема груза, м/с; η — к. п. д. механизма подъема.
Выбор двигателя по конструктивному исполнению
При выборе электродвигателя необходимо учитывать условия его эксплуатации, т. е. температуру, влажность, запыленность помещения, в котором он будет работать, наличие едких газов и др. В соответствии с условиями окружающей среды выбирается конструктивное исполнение по способу защиты от внешних воздействий, а также по способу охлаждения (см. § 2). Кроме того, при выборе необходимо учитывать способ установки и крепления электродвигателя, возможность соединения с производственным механизмом и пр.
terrapumps.com.ua