Асинхронный генератор (АГ) является наиболее распространенной электрической машиной переменного тока, применяемой преимущественно в качестве двигателя.  Только низковольтные АГ (до 500 В питающего напряжения) мощностью от 0,12 до 400 кВт потребляют более 40% всей вырабатываемой в мире электроэнергии, а годовой их выпуск составляет сотни миллионов, покрывая самые разнообразные потребности промышленного и сельскохозяйственного производства, судовых, авиационных и транспортных систем, систем автоматики, военной и специальной техники.[ad#строчный]
Только низковольтные АГ (до 500 В питающего напряжения) мощностью от 0,12 до 400 кВт потребляют более 40% всей вырабатываемой в мире электроэнергии, а годовой их выпуск составляет сотни миллионов, покрывая самые разнообразные потребности промышленного и сельскохозяйственного производства, судовых, авиационных и транспортных систем, систем автоматики, военной и специальной техники.[ad#строчный]
Эти двигатели сравнительно просты по конструкции, весьма надежны в эксплуатации, имеют достаточно высокие энергетические показатели и невысокую стоимость. Именно поэтому непрерывно расширяется сфера использования асинхронных двигателей как в новых областях техники, так и взамен более сложных электрических машин различных конструкций.
Например, значительный интерес в последние годы вызывает применение асинхронных двигателей в генераторном режиме для обеспечения питанием как потребителей трехфазного тока, так и потребителей постоянного тока через выпрямительные устройства. В системах автоматического управления, в следящем электроприводе, в вычислительных устройствах широко применяются асинхронные тахогенераторы с короткозамкнутым ротором для преобразования угловой скорости в электрический сигнал.

[adsense_id=»1″]В определенных условиях эксплуатации автономных источников электроэнергии применение асинхронный режим генератора оказывается предпочтительным или даже единственно возможным решением, как, например, в высокоскоростных передвижных электростанциях с безредукторным газотурбинным приводом с частотой вращения п = (9…15)103 об/мин. В работе [82] описан АГ с массивным ферромагнитным ротором мощностью 1500 кВт при п = =12000 об/мин, предназначенный для автономного сварочного комплекса «Север». В данном случае массивный ротор с продольными пазами прямоугольного сечения не содержит обмоток и выполняется из цельной стальной поковки, что дает возможность непосредственного сочленения ротора двигателя в генераторном режиме с газотурбинным приводом при окружной скорости на поверхности ротора до 400 м/с. Для ротора с шихтованным сердечником и к.з. обмоткой типа «беличья клетка» допустимая окружная скорость не превышает 200 — 220 м/с.[ad#строчный]
Другим примером эффективного применения асинхронного двигателя в генераторном режиме является давнее их использование в мини-ГЭС при устойчивом режиме нагрузки.
Асинхронный генератор отличаются простотой эксплуатации и обслуживания, легко включаются на параллельную работу, а форма кривой выходного напряжения у них ближе к синусоидальной, чем у СГ при работе на одну и ту же нагрузку. Кроме того, масса АГ мощностью 5-100 кВт примерно в 1,3 — 1,5 раза меньше массы СГ такой же мощности и они несут меньший объем обмоточных материалов. При этом в конструктивном отношении они ничем не отличаются от обычных АД и возможно их серийное производство на электромашиностроительных заводах, выпускающих асинхронные машины.
Один из недостатков АД — это то, что они являются потребителями значительной реактивной мощности (50% и более от полной мощности), необходимой для создания магнитного поля в машине, которая должна поступать из сети при параллельной работе асинхронного двигателя в генераторном режиме с сетью или от другого источника реактивной мощности (батарея конденсаторов (БК) или синхронный компенсатор (СК)) при автономной работе АГ. В последнем случае наиболее эффективно включение батареи конденсаторов в цепь статора параллельно нагрузке хотя в принципе возможно ее включение в цепь ротора. Для улучшения эксплуатационных свойств асинхронного режима генератора в цепь статора дополнительно могут включаться конденсаторы последовательно или параллельно с нагрузкой.

Во всех случаях автономной работы асинхронного двигателя в генераторном режиме источники реактивной мощности (БК или СК) должны обеспечивать реактивной мощностью как АГ, так и нагрузку, имеющую, как правило, реактивную (индуктивную) составляющую (соsφн < 1, соsφн> 0).
Масса и размеры конденсаторной батареи или синхронного компенсатора могут превосходить массу асинхронного генератора и только при соsφн =1 (чисто активная нагрузка) размеры СК и масса БК сопоставимы с размером и массой АГ.
Другой, наиболее сложной проблемой является проблема стабилизации напряжения и частоты автономно работающего АГ, имеющего «мягкую» внешнюю характеристику.
При использовании асинхронного режима генератора в составе автономной ВЭУ эта проблема осложняется еще и нестабильностью частоты вращения ротора. Возможные и применяемые в настоящее время способы регулирования напряжения асинхронном режиме генератора.
При проектировании АГ для ВЭУ оптимизационные расчеты следует вести по максимуму КПД в широком диапазоне изменения частоты вращения и нагрузки, а также по минимуму затрат с учетом всей схемы управления и регулирования. Конструкция генераторов должна учитывать климатические условия работы ВЭУ, постоянно действующие механические усилия на элементы конструкции и особенно — мощные электродинамические и термические воздействия при переходных процессах, которые возникают при пусках, перерывах питания, выпадении из синхронизма, коротких замыканиях и других, а также при значительных порывах ветра.
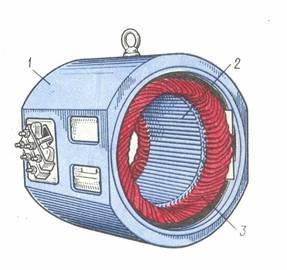
Устройство асинхронной машины с короткозамкнутым ротором показано на примере двигателя серии АМ (рис. 5.1).
Основными частями АД являются неподвижный статор 10 и вращающийся внутри него ротор , отделенный от статора воздушным зазором. Для уменьшения вихревых токов сердечники ротора и статора набираются из отдельных листов, отштампованных из электротехнической стали толщиной 0,35 или 0,5 мм. Листы оксидируются (подвергаются термической обработке), что увеличивает их поверхностное сопротивление.[adsense_id=»1″]Сердечник статора встраивается в станину 12, являющуюся внешней частью машины. На внутренней поверхности сердечника имеются пазы, в которых уложена обмотка 14. Статорную обмотку чаще всего делают трехфазной двухслойной из отдельных катушек с укороченным шагом из изолированного медного провода. Начала и концы фаз обмотки выводят на зажимы коробки выводов и обозначают так:
начала — СС2, С3 ;
концы — С 4, С5, Сб .
[like_to_read]
Обмотку статора можно соединить звездой (У) или треугольником (Д). Это дает возможность применять один и тот же двигатель при двух различных линейных напряжениях, находящихся в отношении например, 127/220 В или 220/380 В. При этом соединению У соответствует включение АД на высшее напряжение.
Сердечник ротора в собранном виде запрессовывается на вал 15 горячей посадкой и предохраняется от проворачивания при помощи шпонки. На внешней поверхности сердечник ротора имеет пазы для укладки обмотки 13. Обмотка ротора в наиболее распространенных АД представляет собой ряд медных или алюминиевых стержней, расположенных в пазах и замкнутых по торцам кольцами. В двигателях мощностью до 100 кВт и более обмотка ротора выполняется заливкой пазов расплавленным алюминием под давлением. Одновременно с обмоткой отливаются и замыкающие кольца вместе с вентиляционными крылатками 9. По форме такая обмотка напоминает «беличью клетку».
[adsense_id=»1″]
Для специальных асинхронных двигателях обмотка ротора может выполняться подобно статорной. Ротор с такой обмоткой помимо указанных частей имеет три укрепленных на валу контактных кольца, предназначенных для соединения обмотки с внешней цепью. АД в этом случае называется двигателем с фазным ротором или с контактными кольцами.
Вал ротора 15 объединяет все элементы ротора и служит для соединения асинхронного двигателя с исполнительным механизмом.
[/like_to_read]
Воздушный зазор между ротором и статором составляет от 0,4 — 0,6 мм для машин малой мощности и до 1,5 мм у машин большой мощности. Подшипниковые щиты 4 и 16 двигателя служат опорой для подшипников ротора. Охлаждение асинхронного двигателя осуществляется по принципу самообдува вентилятором 5. Подшипники 2 и 3 закрыты снаружи крышками 1 , имеющими лабиринтовые уплотнения. На корпусе статора устанавливается коробка 21с выводами 20 обмотки статора. На корпусе укрепляется табличка 17, на которой указываются основные данные АД. На рис.5.1 обозначено также: 6 — посадочное гнездо щита; 7 — кожух; 8 — корпус; 18 — лапа; 19 — вентиляционный канал.
Асинхронный режим генератора
Нравится Загрузка...
vetrodvig.ru
| Эффективный источник питания трехфазного асинхронного двигателя Часть материала взята с сайта www.skif.biz и www.001-lab.com Данное устройство предназначено для питания трехфазных асинхронных двигателей, серийно выпускаемых промышленностью от источника низкого напряжения 12V или от осветительной сети ~220V. В отличие от всех подобных устройств, схема использует рекуперацию энергии обратной ЭДС обмоток двигателя, что позволяет в несколько раз снизить ток потребления двигателем, особенно на холостом ходу. Например, двигатель 0.6 кВт 1350 об/мин на холостом ходу при номинальной частоте вращения потребляет всего 4.5А от источника 12V или около 300 мА от сети ~220V. Такого потребления невозможно добиться при всех существующих способах запитки подобных двигателей. Устройство формирует полноценные 3 фазы для обеспечения нормального вращения двигателя, что позволяет плавно регулировать частоту вращения двигателя в широких пределах. При питании устройства от сети с использованием умножителя напряжения (на каждую фазу двигателя подается в этом случае 400V) мощность двигателя становится близкой к номинальной. При дальнейшем увеличении напряжения питания мощность увеличится пропорционально (при этом, естественно, увеличится потребляемый ток). Фактически, предельная мощность двигателя зависит от параметров силовых элементов схемы (тиристоров и фазных конденсаторов), а также, от диэлектрической прочности изоляции обмоток двигателя, от способности обмотки выдерживать мощные импульсы тока, от механической прочности корпуса двигателя. При усовершенствовании схемы (замене деталей в силовой цепи на более высоковольтные) с двигателя можно снять мощности больше в несколько раз, чем позволяют его паспортные характеристики. Мощность можно увеличивать до тех пор, пока не расплавится обмотка в точках соединения или не разнесет корпус двигателя. Как уже отмечалось, при этом, естественно, вырастет ток потребления. Также замечу, что устройство не является "вечным двигателем" — при существующем дизайне асинхронного двигателя снять с него "лишнее" не получится. Однако применение данной схемы позволяет легко повысить КПД двигателя от 0.6 до 0.9, что может быть важно для энергосберегающих проектов. КПД маломощного до 3 Квт асинхронного двигателя не может быть больше 70%, более мощные двигатели с большим количеством полюсов имеют КПД около 90%. Характерной особенностью схемы является полное отсутствие нагрева двигателя и элементов схемы. Обмотки двигателя питаются короткими и мощными высокоамперными импульсами, через обмотки не протекает постоянный ток. Это не позволяет обмоткам стать активной нагрузкой, что исключает их нагрев. Также, двигатель не греется (соответственно, не перегорает) в случае заклинивания ротора. В некотором роде, двигатель из асинхронного превращается в синхронный. Если судить по потребляемому току, получается, что при нагрузке вала, начинает пропорционально расти ток, однако когда нагрузка становится критической, энергия МП не в состоянии преодолеть силы торможения ротора, обороты двигателя резко падают, вал останавливается. При этом также, падает ток. Стоит отпустить ротор, он начинает раскручиваться и постепенно входит в режим синхронизации. После входа в этот режим можно снимать нагрузку с вала. Главный недостаток схемы состоит в низком пусковом моменте двигателя. При напряжении питания 200V на каждую фазу и начальной частоте 25 Гц пуск и синхронизация наступает за 3 - 5 сек (при используемом двигателе), дальше, можно резко увеличить частоту до номинального значения, при этом двигатель фактически мгновенно отрабатывает команду. К преимуществам такой схемы запитки двигателя можно отнести низкий уровень шума при работающем двигателе, полное отсутствие характерного "гудения", вибрации и т.д. Ротор вращается очень мягко, что позволяет услышать механические дефекты двигателя. Например, выяснилось, что в используемом двигателе был разбит передний подшипник — раньше, при нормальном включении за гулом и вибрацией этого не было слышно. Что касается современных т.н. "частотных преобразователей" используемых в металлообрабатывающих станках, последние например, питают двигатель прямоугольными импульсами, что создает очень мощный шум — как будто работает не двигатель, а сварочный трансформатор. При этом, двигатель, по прежнему остается асинхронным т.е. в нем присутствует эффект "проскальзывания" МП, что может приводить к плаванию оборотов под разной нагрузкой. Данная схема лишена подобного недостатка (см. выше), что делает ее привлекательной для подобных приложений. Используемые в схеме детали доступны, практически, каждому радиолюбителю, что позволяет легко повторить или улучшить схему. Требуются дальнейшие исследования данного способа включения двигателей, поэтому материал представляется в открытом виде. При повторении схемы, просьба сообщить об этом автору с целью обмена опытом.
Описание схемы Для начала следует вспомнить, как надо правильно питать подобные двигатели. В учебниках пишут, что асинхронные двигатели следует запитывать только синусоидальным трехфазным переменным током частотой 50Гц. Однако это не совсем так. Питание двигателя допускается любой формой сигналов в т.ч. прямоугольными импульсами. Существующие частотные преобразователи ШИМ позволяют не только регулировать частоту вращения ротора (она зависит только от частоты) но и мощность — она регулируется шириной импульса. Поскольку такие устройства существуют и серийно выпускаются промышленностью, можно сделать вывод, что форма сигнала не важна. Гораздо важнее правильное фазирование обмоток двигателя — при нарушении этого условия двигатель не будет крутиться вообще или не будет набирать обороты. Для понимания процесса фазирования двигателя вспомним, как выглядит 3х фазный переменный ток. 1. «А»2. «C'»3. «B»4. «А'»5. «C»6. «B'» Подавая такую последовательность импульсов на обмотки, двигатель придет в движение. Форма импульсов (синус или меандр) при этом совершенно не важна. Перед подключением двигателя следует произвести фазирование. Для этого, собираем цепь от низковольтного источника питания 12-24V, в разрыв которой включаем лампу (чтобы не сжечь двигатель или блок питания) и последовательно касаемся щупами клемм колодки двигателя, согласно схеме приведённой выше. Двигатель в этом случае, начнет немного вращаться. После того, как фазы и начала обмоток точно определены, их следует пометить. Это будет важно при подключении двигателя к собранному устройству. Схема источника питания состоит из трех функциональных блоков. Общая или силовая часть, генератор импульсов, инвертор напряжения. В целях снижения трудоемкости при изготовлении, а также, снижения помех, силовую часть и генератор целесообразно выполнить на одной плате. Инвертор может быть отдельным устройством (при питании от батареи) или его может не быть вообще в случае питания от осветительной сети. Последний способ не рекомендуется по причине опасности — в этом случае, часть элементов схемы может оказаться под смертельно опасным относительно «земли» напряжением, поэтому для отладки устройства такой способ нежелателен. Как отмечалось выше, генератор импульсов выдает последовательно 6 импульсов, необходимых для обеспечения создания вращающегося магнитного поля в двигателе. Между импульсами отсутствуют «мертвые» интервалы — в данной схеме смысл в них отсутствует. Частота импульсов задается частотой тактового генератора, для получения номинальной частоты 50 Гц необходима частота генератора 300 Гц. Генератор имеет возможность регулировки частоты с помощью переменного резистора. Каждый импульс на выходе генератора содержит пакет из серии импульсов частотой около 8 кГц, необходимый для управления тиристорами в силовой части схемы. Безусловно, тиристорами можно управлять постоянным током (токовым импульсом) однако такой способ нецелесообразен. Дело в том, что при таком способе управления потребуется применять другие способы «развязки» генератора от силовой части — например, использовать трансформаторы на «железе» или конденсаторы значительной емкости, что негативно скажется на надежности работы устройства. Также, управление тиристорами постоянным током энергозатратно — потребуются мощные ключи. Решение с развязывающими импульсными трансформаторами для данной схемы практически идеально т.к. такое управление решает сразу множество проблем. Итак, каждый из выходов импульсного генератора связан с первичной обмоткой трансформатора. Когда транзистор в цепи выхода генератора открыт (при логической 1 на соответствующем выходе микросхемы счетчика) в первичную обмотку трансформатора поступает пачка импульсов частотой 8 кГц, которая возбуждает такие-же импульсы во вторичной обмотке, связанной с управляющим электродом тиристора, т.е. образуется цепь: катод тиристора - обмотка трансформатора - управляющий электрод. Важно отметить, что в данном случае важна правильная фазировка обмотки трансформатора: на управляющий электрод должны приходить импульсы положительной полярности! Таким образом, схема коммутации обеспечивает создание вращающегося магнитного поля внутри двигателя. Ниже приводится сигналограмма на управляющем электроде любого из тиристоров. Требует пояснения цепь регенерации энергии. Известно, что имея заряженный конденсатор невозможно «напрямую» зарядить от него другой конденсатор так, чтобы напряжение на последнем было выше или равно исходному напряжению на первом конденсаторе. Поэтому, в цепи заряда применен дроссель. Однако, на самом деле, никакой это не дроссель, а часть контура, образованного с одной стороны конденсатором в инверторе большой емкости, катушкой дросселя, открытым тиристором и фазным конденсатором, заряд которого осуществляется в данный момент времени. Когда тиристор открывается, огромная энергия, запасенная электролитическим конденсатором большой емкости, устремляется в обмотку дросселя, вокруг последней создается мощное магнитное поле. В какой-то момент, энергия магнитного поля начинает спадать, и токи самоиндукции превращают дроссель в источник энергии. В итоге, фазный конденсатор заряжается несколько выше напряжения питания, а электролитический конденсатор немного разряжается, отчего создается разность потенциалов, которая не позволяет дальнейшее течение тока из источника питания в фазный конденсатор, тиристор в этот момент закрывается. Независимо от наличия или отсутствия на нем управляющих импульсов ток в этой цепи уже не потечет, поскольку фазный конденсатор заряжен больше источника питания. Таким образом, полная таблица коммутации двигателя с учетом регенерации энергии принимает следующий вид: 1. «А»2. «C'» - Rb3. «B»4. «А'» - Rc5. «C»6. «B'» - Ra Где Rx сигнал регенерации энергии в фазном конденсаторе соответсвующей фазы. Именно поэтому 3 из 6 импульсных трансформаторов двух обмоточные: вторая обмотка управляет тиристором в цепи регенерации энергии. Сигнал на фазном конденсаторе при работающем двигателе представлен в следующей осциллограмме: Фотогалерея устройства. Опытный асинхронный двигатель 0.6 кВт 1350 об/мин R обмоток 12 Ом, пр-во ГДР, 1970 г. Запуск асинхронного двигателяРабота асинхронного двигателя Налаживание устройства Перед включением устройства следует проверить правильность монтажа. Особенно тщательно нужно проверить отсутствие межобмоточных замыканий импульсных трансформаторов. В случае замыкания, разнесет не только тиристоры, но и низковольтную электронику. После выполнения проверок следует подать низковольтное питание на схему. Внимание! На данном этапе ни в коем случае не подавать на силовую часть никакое напряжение! Это можно сделать после того, как будет проверена и отлажена слаботочная часть схемы. Включив питание управления +12 V, сразу проверяем ток. Он не должен превышать 70-100 мА, если ток значительно больше — где-то в схеме КЗ или дохлая(е) микросхемы и т.д. Если ток меньше 50 мА где-то в цепях обрыв. Проверьте еще раз монтаж схемы. Если ток в норме, первым делом следует проверить напряжение на выходе внутреннего стабилизатора +9 V. Далее, проверяем работу генератора импульсов на микросхеме NE 555. К выходу микросхемы подключаем осциллограф и смотрим сигнал. Должны присутствовать короткие (около 20 мксек.) импульсы с амплитудой близкой к напряжению источника питания. Частота импульсов должна быть около 8 кГц. Убедившись в работоспособности этого узла, проверяем генератор на микросхеме К561ЛА7. С выхода генератора должны поступать симметричные прямоугольные импульсы, частота которых, в зависимости от положения движка переменного резистора «обороты» должна быть в пределах от 30 до 500 Гц. Теперь разбираемся с микросхемой К561ИЕ8 — с ее помощью осуществляется формирование фазных управляющих импульсов. Данная микросхема представляет собой десятичный счетчик, формирующий последовательно на каждом выходе сигнал логической «1» по спаду тактового импульса. Для проверки правильности работы этой микросхемы и монтажа, в задающем генераторе вместо конденсатора номиналом 10n временно устанавливаем конденсатор 1 мкф. Включаем устройство и смотрим на светодиоды, подключенные к выходам микросхемы К561ИЕ8. При исправной микросхеме должны последовательно зажигаться светодиоды с 1 по 6 и так по кругу. В работающем устройстве, естественно, все диоды будут просто светиться т.к. глаз человека не в состоянии видеть сигнал частотой выше 25 Гц. Все светодиоды должны светиться с одинаковой яркостью. В случае обрыва обмотки импульсного трансформатора, неисправности транзистора и т.д. диод светиться не будет или будет светиться в «пол накала». Именно поэтому в схеме вместо диодов используются светодиоды — для удобства отладки. Убедившись, что все в порядке, убираем конденсатор из генератора на 1 мкф. Включаем устройство и регулируем переменным резистором частоту тактового генератора. При наименьшей частоте светодиоды будут немного мерцать (особенно хорошо это видно боковым зрением) а при максимальной — светиться. При этом, работающая схема будет издавать характерный «писк», что свидетельствует о том, что в первичные обмотки импульсных трансформаторов поступают управляющие импульсы. Разбираемся с управляющими сигналами тиристоров. Еще раз проверяем разводку вторичных обмоток импульсных трансформаторов. Если все сделано правильно фазируем трансформаторы. Для этого «отвязываем» корпус осциллографа от земли и проверяем сигнал в цепи управляющего электрода каждого тиристора. Землю осциллографа «крокодилом» цепляем к катоду исследуемого тиристора, а щуп подключаем к управляющему электроду. На экране должны присутствовать пакеты импульсов ПОЛОЖИТЕЛЬНОЙ полярности (см. осциллограмму в начале файла) амплитудой не менее 5V. Так нужно последовательно проверить все тиристоры в схеме. На всех должен присутствовать управляющий сигнал. Закончив с этим, можно начать подавать питание на силовую часть схемы. Важное замечание. Помните, что импульсная техника не прощает ошибок! Если что-то пойдет не так, огромная энергия, запасенная электролитическим конденсатором большой емкости, вынесет тиристоры — сразу несколько штук. Будет примерно следующее: А всего-то дел: причина была в дребезге контактов в переменном резисторе подстройки оборотов. В какой-то момент цепь обрывалась, частота тут же возрастала в несколько раз, схема тут же захлёбывалась. Сквозные токи от источника питания (электролитического конденсатора) текли через тиристоры. Неравный бой между тиристорами и электролитическим конденсатором большой емкости всегда заканчивался победой последнего, результат — на картинке. Вдогонку, вынесло еще TL 494 в инверторе и мосфет IRF 1010. Печально, такой ущерб из-за копеечной детали. И хороший урок. Теперь переходим к самому интересному. Подаем на силовую часть сначала низковольтное питание от источника 12-24V через лампу на 5 Вт. Включаем сначала блок управления, ставим минимальную частоту оборотов. Далее, плавно поднимаем напряжение питания силовой части до 15-20 V. Смотрим на лампу. Светиться она не должна. Еще лучше, в разрыв питания силовой цепи включить амперметр: в случае нормальной работы устройства (работают контуры всех трех фаз) ток составит несколько миллиампер при таком напряжении питания и минимальной частоте. Если ток значительно больше (горит или светится в пол накала лампа) прут сквозные токи через схему. Если тока нет вообще — тиристоры не открываются. В случае нормального тока смотрим, что происходит на конденсаторах. Сигнал должен быть примерно такой: У меня получилось около 500 Гц, т.е. 500/6=83 Гц на каждую фазу. Характерно, но в работающем двигателе значение частоты, при которой наступает захлебывание несколько меньше. Определив предельную частоту можно начать подачу высокого напряжения на силовую часть. Включаем генератор, ставим минимальную частоту. Включаем инвертор и плавно увеличиваем напряжение на его выходе. Следим за током потребляемым устройством. Он должен начать расти по мере увеличения напряжения на выходе инвертора. Одновременно, смотрим напряжение на выходе инвертора. Если все идет хорошо, при 50 V двигатель начнет гудеть, при 150 V вал тронется, при 200 V начнет уверенный набор оборотов. Далее, наступит вход в режим синхронизации, гул и гудение снизится, а ток в цепи батареи составит около 3А. Если схема все еще жива, увеличиваем обороты двигателя до номинальных. Это легко т.к. двигатель уже синхронизирован, набор оборотов пройдет очень быстро. Ток при этом подскочит (в момент раскрутки) до 7-10А и тут-же упадет до 4.5 А после набора оборотов. Наслаждайтесь работой устройства. В этот момент следует проверить отсутствие нагрева деталей схемы (аккуратно!), измерить обороты вала, попробовать притормозить вал рукой, следя за потребляемым током. Для контроля оборотов и формы сигнала на фазе следует подключить к одному из фазных конденсаторов через резистор на 10 мОм щуп осциллографа и через резистор на 500 кОм частотомер (китайский мультиметр поддерживающий измерение частоты). Далее, следя за формой сигнала можно увеличить частоту до 100 Гц или выше, пока схема не захлебнется. Это нужно делать с осторожностью (см. выше) т.к. в этом случае сквозными токами вынесет тиристоры. Как показала практика, двигатель легко раскрутить до двойной частоты на каждой фазе, но делать этого все же не стоит. Вопросы, пожелания? Пишите: [email protected] Страница с материалом: http://83.142.8.22/lite/load_async.html Переделал схему в связи с недостатками о которых писал раньше. Теперь для формирования импульсов используется 18 разрядный десятичный счетчик, образованный последовательным соединением 2х микросхем К561ИЕ8. Таким образом, импульс регенерации заряда конденсатора подается в самом конце периода, что не мешает сбору контр ЭДС с обмотки в широком диапазоне нагрузок вала. Можно считать, что такое решение с таймингом почти идеально. Ток потребления на ХХ остался прежним, равно, как и все прочие параметры устройства, однако, удалось добиться ГЛАВНОГО. При торможении вала двигателя рукой перестал лавинообразно расти ток! Если до переделки при легком торможении ток подскакивал до 6А, а при торможении плоскогубцами до 10-15А, теперь ток не поднимается не при каких условиях выше 9А, дальше ротор просто останавливается и ток падает. Более точные результаты измерений под нагрузкой будут после того, как доделаю стенд. Подходящий генератор нашелся, правда он требует ремонта замены щеток... Да, чуть не забыл. Потребовалось уменьшить индуктивность зарядного дросселя т.к. в отличии от первого варианта, заряд должен осуществиться быстрее. Теперь дроссель 1 Мг 0.9 Ом. Без сердечника.
Выкладываю сигналограммы новой схемы устройства. Как видите, добротность обмоток моторчика крайне низка. От ИП требуется довольно много тока для компенсации потерь. Если найти подходящий двиг (2-3 кВт год выпуска чем раньше тем лучше) можно получить довольно интересные результаты.
На фазе. Частота 20 Гц.
Частота 30 Гц.
50 Гц. Больше не раскручиваю. Берегу тиристоры ;-)
Фазовый управляющий импульс в большом увеличении.
Импульс регенерации в большом увеличении.
4 импульса регенерации. Дополнения от Fema (Skif.biz): Если в вашей силовой части перевернуть полярность подпитывающих тиристоров, и поменять полярность подключения источника питания, то целых три тиристора будут катодом сидеть на земле - а это даст возможность удалить три трансформатора, так как они уже не нужны, и напрямую (через огр.резистор) подключить транзисторы к трем тиристорам. При этом правда придется в генераторе подкорректировать разводку фаз к счетчику, что бы все приходило в нужное время (так как полярность подпитки конденсаторов изменилась) Это незначительное изменение в схеме дало резкое уменьшения количества деталей в силовой части.
Дополнения от Fema (Skif.biz): По сути, там колебательный контур который после каждого полутакта заклинивается диодом-тиристором и ждет подходящего времени чтобы сделать следующий полупериод через другой тиристор в обратном направлении. Дополнения от asidalv (автор) (Skif.biz): Добротность на ХХ зависит главным образом от сопротивления обмотки, правильно? В моем варианте это 12.6 Ом, посему добротность никакая. Но взяв более мощный движок (2-3 кВт, 4х полюсный) у него будет ~ 3-5 Ом. Добротность на ХХ ожидается в районе 10, что уже неплохо. Допустим, R=5 Ом L=100 Мг С=10 Мкф тогда Q = (1 / 5) * ((100 / 1000) / (10 / 1000000)) ^ 0.5 = аж 20! частота при этом F = 1 / (6.2831 * Sqr((10 / 1000000) * (100 / 1000))) = 159 Гц Собственная частота резонанса обмоток при вращении естественно упадет и будет около 100 Гц, соответственно, коммутировать можно на близкой к этой частоте т.е. на валу получим около 3000 об/мин и приемлимый ток на ХХ. Теоретически, может быть закольцуется, это будет фантастика! Дополнения от asidalv (автор) (Skif.biz): Господа, внимание! Воистину, правильно заданный вопрос есть гарантия правильного ответа. Я невкурил до конца, мне с этого надо было тут начинать крик, а не со схемы источника питания индуктивной нагрузки. ИТАК, ПОЧЕМУ КОЛЛЕКТОРНЫЕ ДВИЖКИ ЖРУТ МНОГО ТОКА? ОТВЕТ. Для начала проведем два простых опыта с движком джефферсона-якоби образца 1837 года. Первый опыт - движок работает в холостую. Второй под нагрузкой, причем обороты движка под нагрузкой составляют 1/2 от оборотов холостого хода. Почему во втором случае он больше жрет? Коллекторный двигатель, какой бы конструкции он не был, имеет набор полюсных катушек ротора, подключаемых в процессе вращения с помощью щеточно-коллекторного узла к источнику питания. Каждая катушка, состоит из н-ного количества витков проволоки т.е. имеет ИНДУКТИВНОСТЬ. Из курса школьной физики вспоминаем, что ток в индуктивности, подключенной к источнику постоянного тока нарастает ПОСТЕПЕННО, а не сразу. В какой-то момент, рост тока прекращается и катушка индуктивности становится обычным РЕЗИСТОРОМ т.е. становится АКТИВНОЙ нагрузкой. Пока наш допотопный двигаль крутится в холостую и весело искрит щетками коммутация секций обмоток происходит БЫСТРО т.е. индуктивность обмоток не успевает насытится током, цепь питания разрывается коллектором и процесс повторяется. Ток при этом соответсвут паспортному току холостого хода. Теперь мы нагрузим двигатель. Затавим его, например, поднимать груз на высоту h так, чтобы его обороты упали от оборотов холостого хода в 2 раза. Каждая секция обмотки теперь находится под током, также, ровно в 2 раза ДОЛЬШЕ, чем на холостом ходу при этом, только половину этого времени катушка обмотки является индуктивностью а все остальное время -- РЕЗИСТОРОМ. От этого получаем дикий нагрев движка, выгорание обмоток и... быстрое наполнение зеленью карманов Чубайса. Ситуация становится наиболее тяжелой в момент ПУСКА двигателя (трогания авто с места) или ЗАКЛИНИВАНИЯ ротора. В таком тяжелом режиме обмотки двигателя становится проволочными резисторами... Которые перегреваясь убивают движок и сажают аккумулятор. Прочтите эти абзацы несколько раз. Вдумайтесь. Когда я ПОНЯЛ это я почувствовал себя самым счастливым (и одновременно грустным) человеком на всей земле. Я пытаюсь докричаться до людей, но меня никто не хочет слушать... Устройство, которое делал Эд Грей, Тесла, ну еще и я немного руку приложил имеет фишку не в рекурперации (это вторично) а в том, что: ОНО НЕ ДАЕТ НЕ ПРИ КАКИХ ОСТОЯТЕЛЬСТВАХ ИНДУКТИВНОСТИ СТАТЬ РЕЗИСТОРОМ, И ПРИ ЭТОМ ПОДДЕРЖИВАЕТ НУЖНУЮ НАПРЯЖЕННОСТЬ МАГНИТНОГО ПОЛЯ, ЧТО ОБЕСПЕЧИТ ПОСТОЯННЫЙ ТЯГОВОЙ МОМЕНТ НАШЕГО ДВИГАТЕЛЯ! ТАКИМ ОБРАЗОМ СИЛЫ ТОРМОЖЕНИЯ РОТОРА НИКАК (практически) НЕ ВЛИЯЮТ НА ПОТРЕБЛЯЕМЫЙ УСТРОЙСТВОМ ТОК. Читать последний абзац несколько раз до полного понимания сути. Просто большиство из Вас, видимо, было не готово принять эту правду, после правильного вопроса, заданного MSN (skif.biz), я выдал такой вот ответ. И теперь этот путь доступен и Вам. Дополнения от MSN (Skif.biz): В идеале, такой двигатель должен потреблять всегда P=R*I^2, где: I-рабочий ток, а R-сопротивление обмоток, ключей и источника, пусть это будет ионистор... . Ну конечно же потери в стали никто не отменял, и потери в преобразователе который будет подпитывать ионистор компенсируя омические потери, тоже Поэтому есть перспектива уйти от очень емкой батареи. Один из смыслов нового дизайна - избавиться от двигательной ЭДС которая пожирает до 90% энергии источника. При этом прийдется вопреки дизайну ДПТ, где стремятся уменьшить индуктивность обмоток, - наоборт их увеличить. Это потребует увеличит напряжение источника, чтобы обеспечить рабочий ток. Но в такой схеме вся энергия использовавшаяся для создания тока в обмотках по окончании цикла опять вернется в источник, двигатель потребит только потреи что я описал выше, создав номинальный момент. И это не сказки. Такой двигатель был создан в штатах в 74 году Эдвином Греем, и чуть было не дошел до серийного производства. НО не дошел... Изобретателя предупредили, а когда тот не внял, его нашли мертвым .Знакомые и родственники отмечали его отменное здоровье на тот момент... Дополнения от asidalv (автор) (Skif.biz): Поздравляю! Как говорится эффект на лицо. А если дуть в обмоточку 2-3 кВ короткими импульсами частотой 50-70 Гц, при этом аккуратно собирая КЭДС в другой конденсатор получится искомый девайс товарища, который не дожил до наших светлых дней (сорри, дома клава барахлит). А сложность с резонансом - Вы сами правильно заметили, ИНДУКТИВНОСТЬ. Увеличив индуктивность, для создания нужной (прежней) энергии МП потребуется увеличить напругу, но это не проблема. зато резонанс появится во всей красе, причем в широком диапазоне нагрузок. Это нужно будет делать в случае увеличения индуктивности обмоток, т.к. при этом еще увеличится их сопротивление для создания прежней энергии МП (как было до перемотки). Потребуется поднять рабоее напряжение питания двигателя. Но зато появится возможность собирать КЭДС (т.е. теперь ваш двигатель сможет работать в резонансе). Если все сделать правильно, получится, собственно, девайс Грея, о котором я давно уже говорю. Еще много моментов, но путь выбран правильный. Дополнения от asidalv (автор) (Skif.biz): Чтобы создать примерно одинаковую энергию МП в жвигателе нужно: 1В 100А == 100B 1A == 1000В 0,1А С этим, надеюсь, все тут согласны? Понятно, что в третьем случае, потребуется делать инвертор DC-DC, за счет потерь в котором вы потеряете 10-20% в тепло и магнитные потери в трансформаторе. Однако, при питании двигателя ТАКИМ напряжением каждая полюсная обмотка будет состоять из большого количества витков, что даст возможность собирать с обмоток контрЭДС при каждом размыкании цепи и использовать эту КЭДС повторно т.е. осуществить рекурперацию энергии в процессе движения автомобиля, а не при торможении, как это вы тут делаете. В этом есть центральная идея и смысл девайсов Грея. Просто в его движках делается это настолько изящно что силы торможения ротора слабо влияют на потребляемый устройством ток. Насколько слабо -- точно не известно, но (сужу по дискуссиям Хакенбергера) влияют весьма ощутимо. Эта область практически не изучена, во всяком случае я НЕ ЗНАЮ ни одного примера серийно выпускаемого электродвигателя где это явление используется с пользой. Рекурперация торможением -- это понятно, это давно есть. А ЭТОГО -- увы, НЕТ. И еще по поводу ВД. Нет достоверных сведений о том (опять-же, сужу по первоисточникам) что девайсы Грея были вечняками. Неизвестно, пытался ли он их "закольцевать". Поэтому вести на эту тему дискуссию, по крайней мере, на данном этапе бессмысленно. Измышления г-на Пети Лиденмана, который считал, что эти движки были вечняками не стоят гроша, брать оттуда информацию -- себя не уважать. Даже беглый анализ патентов (а это почти все, что нам осталось от Грея) показывает что Лиденман лгал, причем, скорее всего, умышленно и весьма успешно. Настолько успешно, что буржуйские альтернативщики уже лет 10 искрят своими установками, получая мифическую радиантную энергию... К пониманию принципов работы этих устройств от не продвинулись не на шаг. Исключение -- Бедини, ну может быть, еще пара человек. Но у них тоже не работает... Энергия не может принадлежать кому-то одному, потому что мы, и все вокруг нас - Энергия! Сайт: www.001-lab.at.ua |
te.zavantag.com
|
Большинство двигателей переменного тока являются асинхронные двигатели. Асинхронные двигатели отдают предпочтение из-за их надежности и простоте. На самом деле, 90% промышленных двигателей асинхронных двигателей. Никола Тесла задумал основные принципы многофазного асинхронного двигателя в 1883 году, и был с половиной лошадиных сил (400 Вт) модели 1888 года. Тесла продал права на производство George Westinghouse за $ 65000. Большинство крупных (> 1 л или 1 кВт) промышленные двигатели поли-фазных двигателей индукции. В поли-фазы, мы имеем в виду, что статор содержит несколько различных обмотках двигателя на полюсе, что обусловлено соответствующим время изменения синусоиды. На практике это два или три этапа. Крупные промышленные двигатели 3-фазы. Хотя мы и включают в себя многочисленные иллюстрации из двух трехфазных двигателей для простоты, мы должны подчеркнуть, что почти все поли-фазных двигателей три фазы. По индукции двигателя, мы подразумеваем, что обмотки статора вызывает тока в проводниках ротора, как трансформатор, в отличие от коллекторного мотора DC коммутатор. СтроительствоАсинхронный двигатель состоит из ротора, известно как якорь, и статор содержащие обмотки подключены к поли-фазный источник энергии, как показано на рисунке ниже . Простой 2-фазный асинхронный двигатель ниже похож на 1/2 лошадиных сил двигатель, Никола Тесла, введенные в 1888 году.
Tesla многофазных асинхронных двигателей. Статора на рисунке выше намотан пары катушек соответствующих фазах электрической энергии доступны. 2-фазный асинхронный двигатель статора выше, имеет 2-пары катушек, одна пара для каждой из двух фаз переменного тока. Отдельных катушек пары соединены последовательно и соответствуют противоположными полюсами электромагнита. То есть, одна катушка соответствует N-полюс, другой S-полюса до фазы полярность переменного тока меняется. Другой пары катушек ориентирована 90 ° в пространстве к первой паре. Эта пара катушек подключен к сети сдвинуты во времени на 90 ° в случае 2-х фазного двигателя. В свое время Тесла, источник из двух фаз переменного тока был 2-фазный генератор переменного тока. Статора на рисунке выше, имеет выступ, очевидно выступающие полюса, используемые на ранних асинхронный двигатель Теслы. Эта конструкция используется и по сей день к югу от дробной мощными двигателями (<50 Вт). Тем не менее, для увеличения крутящего момента двигателя меньше пульсации и более высокие результаты эффективности, если катушки встроенных в прорезей в статор расслоения. (Рис. ниже )
Статора показывает слотами для обмоток. Статора ламинаций тонкие изолированные кольца с прорезями перфорированные листы из электрической стали. Стек из них обеспечено до конца винты, которые также могут провести в конце корпуса.
Статор с (а) 2-φ и (б) 3-φ обмоток. На рисунке выше , обмотки для двух-фазный электродвигатель и трехфазного двигателя были установлены в пазы статора. Катушки намотаны на внешний прибор, затем работал в пазы. Изоляция зажатый между периферии катушки и слот для защиты от истирания. Фактические обмотки статора являются более сложными, чем один обмотки на полюс на рисунке выше . Сравнение 2-φ двигателя 2-φ двигатель Теслы с выступающими полюсами, число витков то же самое. На самом большом двигатели, обмотки полюсов, делится на одинаковые катушки вставляется в слот много меньше, чем прежде. Эта группа называется фазой пояса. См. рисунок ниже . Распределение витков фазы пояс отменить некоторые нечетные гармоники, производя более синусоидального распределения магнитного поля через полюс. Это показано в разделе синхронный двигатель. Слоты на краю полюса могут иметь меньше оборотов, чем другие слоты. Пограничный слота может содержать обмотка из двух этапов. Это означает, что фаза пояса перекрываются.
Ключ к популярности асинхронный двигатель переменного тока является простота, о чем свидетельствует простой ротор (рис. ниже ). Ротор состоит из вала, стали ламинированные ротора, и встроенные медные или алюминиевые клетке белки, показанный на (б) удалены из ротора. По сравнению с двигателем постоянного тока якоря, нет коммутатора. Это избавляет от кисти, дуги, искрения, графитовой пыли, настройки кисти и замены, и вновь обработки коммутатором.
Ламинированные ротора (а) встроенный короткозамкнутым ротором, (б) проводящие клетки удаляются из ротора. Проводники короткозамкнутым ротором могут быть искажены, деформированы, с respsect к валу. Смещение с пазы статора уменьшает крутящий момент пульсаций. Оба ротора и статора ядра состоят из стека изолированных расслоения. Расслоения покрыты изоляционным лаком или оксида, чтобы минимизировать потери от вихревых токов. Сплав используется в расслоений выбран низкие потери гистерезиса. Принцип действияКраткое объяснение работы в том, что статор создает вращающееся магнитное поле, которое увлекает за собой ротор вокруг. Теория работы асинхронных двигателей на основе вращающегося магнитного поля. Одним из способов создания вращающегося магнитного поля, чтобы повернуть на постоянных магнитах, как показано на рисунке ниже . Если скользящая силовых линий магнитного потока сократить проводящих диск, он будет следить за движением магнита. Линии потока резки проводник будет вызывать напряжение, и, как следствие тока в проводящем диске. Этот ток создает полярность электромагнита, против движения постоянного магнита, закон Ленца. Полярность электромагнита такова, что она тянет с постоянным магнитом. Диск следует с немного меньшей скоростью, чем постоянный магнит.
Вращающееся магнитное поле создает крутящий момент в проводящих дисков. Крутящий момент, развиваемый на диске пропорционально количеству силовые линии резки диска и скорости, с которой она пересекает диск. Если диск был вращаться с той же скоростью, как постоянный магнит, то не было бы поток резки диска, не индуцированных током, не электромагнитом поле, без крутящего момента. Таким образом, скорость диска всегда будет отставать, что вращающегося постоянного магнита, так что линии потока сократить диска индуцирует ток, создает электромагнитное поле в диске, который следит за постоянным магнитом. Если нагрузка приложена к диску, замедляя его, больше крутящего момента, будут разработаны в несколько строк поток сократить диска. Крутящий момент пропорциональная скольжению, степени, в которой диск отстает от вращающегося магнита. Более скольжения соответствует более резки потока проводящего диска, развивается больший крутящий момент. Аналоговых автомобильных вихретоковый спидометр на основе принципа показано выше. С диска сдерживается отклонения весной, диска и иглы пропорциональна скорости вращения магнита. Вращающееся магнитное поле создается двумя катушками, расположенными под прямым углом друг к другу, движимые течениями, которые 90 ° по фазе. Это не должно быть удивительно, если вы знакомы с осциллографа Лиссажу моделей.
Из фазы (90 °) синусоидальной волны производят круговые Лиссажу шаблон. На рисунке выше , круговой Лиссажу производится при движении горизонтальных и вертикальных входов осциллографа с 90 ° от фазы волны синуса. Начиная с (а) с максимальным «X» и минимальный "Y" отклонения, следом движется вверх и налево в сторону (б). С (а) и (б) два сигнала равны 0,707 V рк на 45 °. Этот пункт (0,707, 0,707) приходится на радиус окружности между (а) и (б) след переходит в (б) с минимальным "X" и максимальную "Y" отклонения. С максимальным отрицательным "X" и минимальный "Y" отклонения, следом движется к (с). Затем с минимальным "X" и максимально негативный "Y", он движется к (г), и на спине (а), завершая один цикл.
По оси Х и Y синус-косинус оси следа круг. Рисунок выше показывает две 90 °, сдвинутых по фазе синусоидальные волны применяется для осциллографа прогиб плиты, которые находятся под прямым углом в пространстве. Если бы это было не так, одномерные линии будет отображать. Сочетание 90 о поэтапном синусоиды и правого угла отклонения, результаты в двумерном шаблону круг. Этот круг прослеживается путем вращающихся против часовой стрелки электронного пучка. Для сравнения, на рисунке ниже показано, почему в фазу синусоид не будет производить круговой схеме. Равные "X" и "Y" отклонение движется освещенного пятна от начала координат на (а) до правого (1,1) в (б), вниз слева происхождения на (с), вниз, влево (-1. 1) на (г), так и резервные копии право происхождения. Линии производится равными отклонения по обеим осям, у = х представляет собой прямую линию.
Не круговыми движениями от синфазных сигналов. Если пара 90 ° от фазы волны синуса приводит к круговой Лиссажу, подобная пара токи должны быть в состоянии производить круговые вращающегося магнитного поля. Так обстоит дело на 2-фазный электродвигатель. По аналогии три обмотки размещены 120 ° друг от друга в пространстве, и подается с соответствующим 120 ° поэтапно тока также будет производить вращающегося магнитного поля.
Вращающегося магнитного поля от 90 о поэтапном синусоид. В 90-х о поэтапном синусоид, на рисунке выше , прогресс с точки (а) по (д), магнитное поле вращается против часовой стрелки (рис. объявление) следующим образом:
Скорость двигателяСкорость вращения статора вращающегося магнитного поля, связанные с числом пар полюсов статора на фазу. "Полным ходом" Рисунок ниже имеется в общей сложности шесть столбов или три полюса пары и три этапа. Тем не менее, существует только один полюс пара на фазу, количество нам нужно. Магнитное поле будет вращаться раз в синусоиды цикла. В случае мощности 60 Гц, поле вращается в 60 раз в секунду или 3600 оборотов в минуту (RPM). За 50 Гц Мощность, она вращается в 50 оборотов в секунду, или 3000 оборотов в минуту. 3600 и 3000 оборотов в минуту, является синхронной скорости вращения двигателя. Хотя ротора асинхронного двигателя никогда не достигает такой скорости, это, конечно, верхний предел. Если мы удвоим число полюсов двигателя, синхронные скорости разрезать пополам, так как магнитное поле поворачивается на 180 ° в пространстве на 360 о электрических волн синуса.
Удвоение полюсов статора вдвое синхронной скорости. Синхронная скорость определяется по формуле: N с = 120 · F / P N = с синхронной скорости в оборотах в минуту F = частота сети прикладных, Гц P = общее число полюсов на фазу, кратно 2 Пример:"Половинной скорости" Рисунок выше имеет четыре полюса на фазу (3 фазы). Синхронной скорости на 50 Гц Мощность: S = 120,50 / 4 = 1500 оборотов в минутуКраткое разъяснение асинхронного двигателя является то, что вращающееся магнитное поле, создаваемое статором тащит ротор вокруг нее. Чем дольше более правильное объяснение в том, что магнитное поле статора вызывает переменный ток в роторе короткозамкнутым ротором проводников, является вторичной обмотки трансформатора. Это индуцированный ток ротора, в свою очередь создает магнитное поле. Вращающихся статора магнитное поле взаимодействует с этим ротором поля. Ротор поля пытается согласовать с вращающимся полем статора. В результате вращения ротора с короткозамкнутым ротором. Если бы не было механической нагрузке двигателя, не влияет, горизонтали или других потерь, ротор будет вращаться с синхронной скорости. Тем не менее, скольжения между ротором и синхронных поля статора скорость развивает крутящий момент. Это магнитный поток резки ротора дирижеры, как он скользит который развивает крутящий момент. Таким образом, заряженный мотор будет скользить в пропорции к механическим нагрузкам. Если ротор был работать на синхронной скорости, не было бы никакого потока статора сокращение ротора, не ток, индуцированный в роторе, ни крутящего момента. Крутящий моментКогда власти впервые применили на двигатель, ротор находится в состоянии покоя, а статор магнитного поля вращается с синхронной скоростью N с. Статора поле резки ротора при синхронной скорости с N. Ток, индуцированный в роторе короткозамкнутых витков является максимальным, как частота тока, частоты. Как только ротор ускоряется, скорость, с которой поток статора пересекает ротор представляет собой разницу между синхронной скорости с N и фактической скорости вращения ротора N или (N S - N). Отношение фактического потока резки ротора синхронной скорости определяется как скольжение: с = (N S - N) / N с где: N = с синхронной скорости, N = скорость вращения ротораЧастота тока, наведенного в роторе проводники только выше, чем частота сети при запуске двигателя, уменьшая как ротор подходы синхронной скорости ротора частота задается.: F R = S · F где: S = скольжения, F = статора частота линии электропередачиКупон на 100% крутящего момента, как правило, 5% или менее в асинхронных двигателей. Таким образом, для F = 50 Гц, частоты сети, частота индукционного тока в роторе F R = 0,05 · 50 = 2,5 Гц. Почему так низко? Статор магнитного поля вращается с частотой 50 Гц. Частота вращения ротора составляет 5% меньше. Вращающееся магнитное поле, только режущий ротор на 2,5 Гц. 2,5 Гц представляет собой разницу между синхронной скоростью и фактической скорости вращения ротора. Если ротор спины немного быстрее, при синхронной скорости, не сократит поток ротора на всех, F R = 0.
Крутящий момент и скорость против скольжения%. % N =% с синхронной скорости. На рисунке выше графика видно, что пусковым моментом известный как блокировка ротора крутящий момент (LRT) выше, чем 100% от максимального крутящего момента нагрузки (ВТФ), сейф непрерывного крутящим моментом. Блокировка ротора крутящий момент составляет около 175% FLT на примере двигателя графике выше. Пусковой ток известный как блокировка ротора ток (LRC) составляет 500% от полной нагрузки (FLC), сейф рабочий ток. В настоящее время высока, потому что это аналогично короткое вторичного на трансформаторе. Как только ротор начинает вращаться момент может снизиться немного для некоторых классов двигателей стоимость известна как притяжение до крутящего момента. Это самое низкое значение крутящего момента постоянно сталкиваются пускового двигателя. Как только ротор доходы 80% от синхронной скорости, крутящий момент увеличивается от 175% до 300% от максимального крутящего момента нагрузки. Это нарушение крутящего момента за счет большего, чем обычно 20% скольжения. В настоящее время снизился незначительно на данный момент, но будет быстро уменьшаться за этой точкой. Как только ротор ускоряется с точностью до нескольких процентов от синхронной скорости, как крутящий момент и ток будет уменьшаться значительно. Скольжения будет лишь на несколько процентов при нормальной работе. Для работы двигателя, любой части кривой крутящего момента до 100% номинального момента в норме. Нагрузка двигателя определяет рабочую точку на кривой крутящего момента. В то время как крутящий момент двигателя и ток может превышать 100% в течение нескольких секунд во время запуска, непрерывная работа над 100% может привести к повреждению двигателя. Любые нагрузки крутящий момент выше крутящий момент пробоя будет тормозить двигателем. Крутящий момент, скольжение, и ток будет стремиться к нулю для "не механический момент" нагрузки. Это условие аналогично открытом вторичном трансформатора. Есть несколько основных конструкций асинхронных двигателей (рисунок ниже ) с указанием consideable отклонение от кривой крутящего момента выше. Различные конструкции оптимизированы для запуска и работы различных видов грузов. Блокировка ротора крутящий момент (LRT) для различных конструкций двигателя и размеров колеблется от 60% до 350% крутящего момента полной нагрузке (ВТФ). Пусковой ток при заторможенном роторе или ток (LRC) может варьироваться от 500% до 1400% от полной нагрузки (FLC). Этот ток может представлять собой начало большой проблемой для асинхронных двигателей. Класса NEMA дизайнРазличные стандартные классы (или конструкции) для двигателей, соответствующих кривых крутящего момента (рис. ниже ) были разработаны, чтобы лучше управлять различными нагрузками типа. Национальная ассоциация производителей электрооборудования (NEMA) указал двигатель классов A, B, C, D и для удовлетворения этих требований диска. Подобные Международной электротехнической комиссией (IEC) класса N и H соответствует NEMA B и C соответственно конструкции.
Характеристика конструкций NEMA. Все двигатели, за исключением D класса, работают на 5% или менее скольжение при полной нагрузке.
Коэффициент мощностиАсинхронные двигатели представляют отставание (индуктивный) коэффициент мощности к источнику власти line.The фактор в значительной полной загрузке двигателей высокой скорости может быть столь же благоприятным, как 90% для больших двигателей высокой скорости. На 3/4 полной нагрузки крупнейших высокой скорости двигателя коэффициент мощности может быть 92%. Коэффициент мощности для малых двигателей низкой скорости может быть ниже 50%. При запуске, коэффициент мощности может быть в диапазоне от 10% до 25%, увеличившись в качестве ротора достигает скорости. Коэффициент мощности (PF) значительно варьируется с двигателем механической нагрузки (см. рис ниже ). Ненагруженного двигателя аналогичный трансформатор, без активной нагрузки на вторичной. Маленькая сопротивление, отраженных от вторичного (ротор) с первичным (статор). Таким образом, линия электропередачи видит реактивной нагрузки, как низко как 10% сбора в ПФ. Как только ротор загружен увеличения активная составляющая отражается от ротора на статор, повышая коэффициент мощности.
Асинхронного двигателя коэффициент мощности и эффективности. ЭффективностьБольшие трехфазные двигатели являются более эффективными, чем меньше 3-х фазных двигателей, и большинство всех однофазных двигателей. Большая эффективность асинхронного двигателя может достигать 95% при полной нагрузке, хотя 90% чаще. Эффективность для слегка асинхронного двигателя нагрузка или нет загруженных плохо, потому что большинство нынешних участвует в поддержании намагничивающего потока. В момент нагрузки увеличивается, больше ток потребляется в создании крутящего момента, в то время как ток, связанный с намагничивания остается неизменной. КПД при 75% FLT может быть немного выше, чем на 100% FLT. Эффективность уменьшается на несколько процентов на 50% FLT и снижение несколько процентов на 25% FLT. Эффективность только ухудшится, ниже 25% FLT. Изменение эффективности загрузки показано на рисунке выше Асинхронные двигатели, как правило, негабаритных, чтобы гарантировать, что их механические нагрузки может быть запущен и управляется при любых условиях эксплуатации. Если двигатель многофазных загружен менее чем на 75% от номинального крутящего момента, где пики эффективность, эффективность страдает незначительно до 25% FLT. Nola корректор коэффициента мощностиФрэнк Nola НАСА предложило корректор коэффициента мощности (PFC), а устройство энергосбережения для однофазных асинхронных двигателей в конце 1970-х годов. Она основана на предпосылке, что меньше, чем при полной загрузке асинхронный двигатель менее эффективен и имеет более низкий коэффициент мощности, чем при полной загрузке двигателя. Таким образом, энергия может быть сохранен в частично загружены двигателей, 1-φ двигателей, в частности. Потребление энергии в поддержании статор магнитного поля относительно неподвижны относительно изменения нагрузки. В то время как нет ничего, чтобы сохранить в полной загрузке двигателя, напряжение частично загружены двигатель может быть сведена к уменьшению энергии, необходимой для поддержания магнитного поля. Это позволит повысить коэффициент мощности и эффективности. Это была хорошая концепция заведомо неэффективных однофазных двигателей, для которых он предназначен. Эта концепция не очень применимо к большим 3-х фазных двигателей. Благодаря своей высокой эффективности (90% +), существует не так много энергии, чтобы спастись. Кроме того, 95% эффективный двигатель по-прежнему 94% эффективны в 50% максимального крутящего момента нагрузки (ВТФ) и 90% эффективности на 25% FLT. Потенциальная экономия энергии при переходе от 100% FLT 25% FLT разница в эффективности 95% - 90% = 5%. Это не 5% от полной мощности нагрузки, но 5% от мощности на снижение нагрузки. Коэффициент мощности Nola корректора могут быть применимы к 3-фазный двигатель, который вхолостую большую часть времени (до 25% FLT), как и пресс-удар. Срок окупаемости для дорогого электронного контроллера, по оценкам, будет непривлекательной для большинства приложений. Хотя, это может быть экономически как часть электронного стартера и скорость управления. [7] Асинхронный двигатель переменного токаАсинхронный двигатель может работать как генератор, если он приводится в действие от крутящего момента больше, чем 100% от синхронной скорости. (Рис. ниже ), что соответствует нескольким% "негативных" скольжения, скажем, 1% скольжения. Это означает, что мы вращающийся двигатель быстрее, чем синхронные скорости, ротор продвигается на 1% быстрее, чем статора вращающегося магнитного поля. Как правило, она отстает на 1% в двигателе. Поскольку ротор сокращение магнитного поля статора в обратном направлении (ведущий), ротора индуцирует напряжение в статор питание электрической энергии обратно в линию электропередач.
Отрицательный момент делает асинхронный двигатель в генератор. Такой асинхронный генератор должен быть возбужден "живой" источник в 50 или 60 Гц. Никакая власть не может быть создан в случае сбоя питания энергетической компании. Этот тип генератора, как представляется, подходят в качестве резервного источника питания. В качестве вспомогательного генератора ветротурбины мощностью, она имеет то преимущество, не требующих автоматического отключения питания выключателем для защиты ремонта экипажей. Это отказоустойчивости. Малые удаленные (от электросети), установка может быть сделать самовозбуждение путем размещения конденсаторов параллельно со статором фаз. Если нагрузка удаляется остаточный магнетизм может вызвать небольшое количество тока. Этот ток имеет право поступать по конденсаторы без рассеивания энергии. В качестве генератора доводится до полной скорости, ток увеличивается на поставку тока намагничивания в статоре. Нагрузка может быть применена в этой точке. Регулировка напряжения оставляет желать лучшего. Асинхронный двигатель может быть преобразован в автогенератора добавлением конденсаторов. [6] Запуск процедуры для приведения ветровой турбины до скорости в двигательном режиме с применением нормального напряжения ЛЭП статора. Любой ветер индуцированные скорости турбины превышает синхронную скорость будет развиваться негативный момент, поставляющие электроэнергию обратно в линию электропередач, обращающего нормального направления электрического киловатт-час метр. В то время как асинхронный двигатель представляет собой отставание коэффициента мощности в линии электропередачи, индукции генератор представляет собой ведущий фактор власти. Индукционные генераторы не имеют широкого применения в обычных электростанций. Скорость привода паровой турбины является устойчивым и управляемым в соответствии с требованиями синхронные генераторы. Синхронные генераторы и более эффективным. Скорость ветра турбины трудно контролировать, и при скорости ветра порывы вариации. Индукционный генератор может лучше справиться с этими изменениями в связи с присущими скольжения. Это подчеркивает шестерен и механических компонентов меньше, чем синхронные genertor. Тем не менее, это допустимое изменение скорости составляет всего около 1%. Таким образом, прямая линия связана асинхронный генератор считается фиксированной скорости в ветровой турбины. Смотрите Дважды кормили асинхронный генератор для истинного генератора переменного скорости. Несколько генераторов или несколькими обмотками на общем валу может быть включен, чтобы обеспечить высокую и низкую скорость для размещения различных условиях ветра. Пусковая и управление скоростьюНекоторые асинхронные двигатели можно сделать более 1000% от полной нагрузки во время пуска, хотя, несколько сотен процентов чаще. Малые двигатели несколько киловатт или меньше может быть запущен прямого подключения к линии электропередачи. Начиная больших двигателей может привести к провисанию линии напряжения, влияя на другие нагрузки. Мотор-начала рейтингу выключателей (по аналогии с медленным предохранителей) необходимо заменить стандартные выключатели для запуска двигателей в несколько киловатт. Этот выключатель принимает высокие перегрузки по току на время запуска.
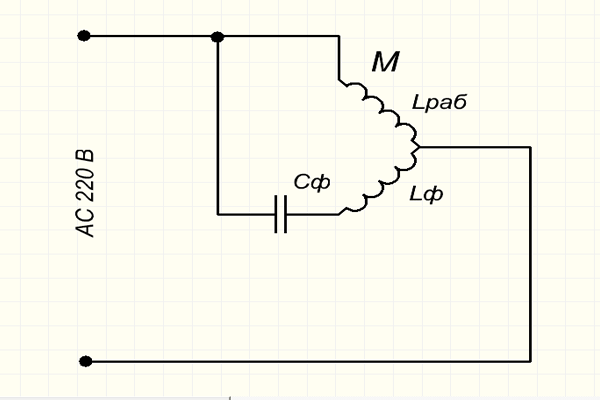
Автотрансформатор асинхронный двигатель стартером. Motors более 50 кВт использовать пускатели уменьшить линии тока от нескольких сотен до нескольких сотен процентов при полной нагрузке. Прерывистый autotarnsformer долга может привести к снижению напряжения статора на долю минуты во время начала интервала, с последующим применением полного напряжения линии как показано на рисунке выше . Закрытие S контакты относится пониженное напряжение во время начала интервала. S контакты открытыми и R контакты замыкаются после запуска. Это уменьшает пусковой ток, скажем, 200% от полной нагрузки. Поскольку автотрансформатор используется только для короткого промежутка начала, она может быть размером значительно меньше, чем непрерывный блок долг. Запуск 3-фазный двигатель на 1-фазныйТрехфазные двигатели будут работать на однофазной же легко, как однофазных двигателей. Единственная проблема для любой двигатель запускается. Иногда 3-х фазных двигателей приобретаются для использования на одном этапе, если три этапа подготовки не предвидится. Мощность должна быть 50% больше, чем у сопоставимых однофазный мотор, чтобы компенсировать один неиспользуемый обмотки. Однофазный применяется для пары обмоток simultanous с начала конденсатор последовательно с третьей обмотки. Запуска двигателя открывается на рисунке ниже, при запуске двигателя. Иногда меньше, чем емкость конденсатор пуска сохраняется во время работы.
Запуск трехфазного двигателя на одной фазе. Схема на рисунке выше для запуска трехфазного двигателя от однофазной известна как статический преобразователь фазы, если вал двигателя не загружен. Кроме того, двигатель работает как 3-фазный генератор. Три фазы питания может быть использован с из трех обмоток статора для питания других 3-фазного оборудования. Конденсатор поставляет синтетические фазы примерно на полпути ∠ 90 ° между 180 ° ∠ однофазного источника питания терминалов для запуска. Во время работы двигатель генерирует примерно стандартный 3-φ, как показано на рисунке выше . Мэтт Isserstedt показывает полный дизайн для питания магазин домашней машине. [8]
Самозапуска статический преобразователь фазы. Рабочий конденсатор = 25 30μF в HP. По материалам рисунке 7, Ханрахан [9] Поскольку статический преобразователь фаза не имеет крутящий момент нагрузки, он может быть запущен с помощью конденсатора значительно меньше, чем обычный конденсатор старта. Если он достаточно мал, он может быть оставлен в цепи, как во конденсатора. На рисунке выше . Тем не менее, меньше во конденсаторов приводит к лучшей 3-фазный выходной мощности как показано на рисунке ниже . Кроме того, регулировка этих конденсаторов для выравнивания токов, измеряемой в три этапа приводит к наиболее эффективной машиной. [9] Тем не менее, большая емкость начала требуется около секунды, чтобы быстро начать преобразователя. Ханрахан предусматривает строительство деталях. [9]
Более эффективный статический преобразователь фазы. Начать конденсатор = 50-100μF/HP. Запуск конденсаторы = 12-16μF/HP. Взято из рисунка 1, Ханрахан [9] Несколько полейАсинхронные двигатели могут содержать несколько обмотки поля, например, 4-полюсные и 8-контактный обмотке соответствующего до 1800 и 900 оборотов в минуту синхронной скорости. Возбуждение одного поля или другой менее сложным, чем перемонтажа статорных катушек на рисунке ниже .
Несколько полей позволяют изменения скорости. Если поле с сегментированным приводит вывели, он может быть перемонтирован (или коммутацией) с 4-полюсный 2-полюсный, как показано выше, для 2-х фазного двигателя. 22,5 о сегментах переключается на 45 ° сегментов. Только провода для одной фазы показано выше, для ясности. Таким образом, наш асинхронный двигатель может работать на различных скоростях. При переключении выше 60 Гц двигатель с 4-полюсный с 2-х полюсный синхронный увеличивает скорость от 1800 оборотов в минуту до 3600 оборотов в минуту. Если двигатель приводится в движение 50 Гц, что будет соответствующий 4-полюсные и 2-полюсный синхронный скоростях? N з = 120F / P = 120 * 50/4 = 1500 оборотов в минуту (4-контактный) N с = 3000 оборотов в минуту (2-полюсный)Переменное напряжениеСкорость небольшая короткозамкнутым ротором двигатели для приложений, таких как вождение болельщиков, может быть изменена за счет снижения напряжения в сети. Это уменьшает крутящий момент на нагрузку, которая снижает скорость. (Рис. ниже )
Переменное напряжение управляет скоростью асинхронного двигателя. Электронный контроль скоростиСовременная твердотельная электроника расширить возможности для контроля скорости. При изменении на 50 или 60 Гц частоты сети на более высокие или более низкие значения, синхронной скорости вращения двигателя может быть изменена. Тем не менее, снижение частоты тока, подаваемого в двигатель также снижает реактивность X L, который увеличивает ток статора. Это может привести к магнитной цепи статора к насыщению с катастрофическими результатами. На практике, напряжение на двигателе должно быть уменьшено, когда частота уменьшается.
Электронная регулировка скорости привода. С другой стороны, частоты может быть увеличена до увеличения синхронной скорости двигателя. Тем не менее, напряжение должно быть увеличено преодолеть повышение реактивности держать ток до нормальных значений и поддержания крутящего момента. Инвертор (рис. ) Аппроксимирует синусоид с двигателем с мощностью широтно-импульсной модуляции. Это рубленый сигнала который либо включен, либо выключен, высокий или низкий, процент времени «включения» соответствует мгновенное напряжение синусоидальной волны. После электроники применяется для индукции управления двигателем, многие методы управления доступны, варьируется от простого к сложному: Резюме: Контроль скорости
Резюме: Tesla многофазных асинхронных двигателей
Линейный асинхронный двигательСтатора раны и ротора короткозамкнутым ротором от асинхронного двигателя может быть сокращено на окружности и развернул в линейный асинхронный двигатель. Направление линейное перемещение контролируется последовательность диска статора фазы. Линейный асинхронный двигатель был предложен в качестве привода для высокой скорости пассажирских поездов. До этого времени, линейный асинхронный двигатель с сопровождающим магнитная система левитации отталкивания, необходимых для плавный ход был слишком дорогостоящим для всех, кроме экспериментальных установок. However, the linear induction motor is scheduled to replace steam driven catapult aircraft launch systems on the next generation of naval aircraft carrier, CVNX-1, in 2013. This will increase efficiency and reduce maintenance. [4] [5] |
shemabook.ru




 Глядя на график, можно сделать следующий простой вывод. Для обеспечения вращения двигателя надо подать на его фазные обмотки 6 импульсов, соответствующие пикам каждой синусоиды трехфазного тока. Соответственно, если использовать генератор импульсов, имеющий 6 выходов последовательно выдающий импульс на каждый выход можно обеспечить создание вращающего магнитного поля внутри двигателя, что заставит последний вращаться. Если представить, что каждая обмотка двигателя имеет точки начала и конца, то приложение напряжения к обмотке «А» в прямой полярности (т.е. на начало обмотки подводится «+») обозначить как «А» и в обратной полярности (на начало обмотки в этом случае подводится «-») обозначить как «А'» то полная схема коммутации обмоток примет следующий вид:
Глядя на график, можно сделать следующий простой вывод. Для обеспечения вращения двигателя надо подать на его фазные обмотки 6 импульсов, соответствующие пикам каждой синусоиды трехфазного тока. Соответственно, если использовать генератор импульсов, имеющий 6 выходов последовательно выдающий импульс на каждый выход можно обеспечить создание вращающего магнитного поля внутри двигателя, что заставит последний вращаться. Если представить, что каждая обмотка двигателя имеет точки начала и конца, то приложение напряжения к обмотке «А» в прямой полярности (т.е. на начало обмотки подводится «+») обозначить как «А» и в обратной полярности (на начало обмотки в этом случае подводится «-») обозначить как «А'» то полная схема коммутации обмоток примет следующий вид: Несколько импульсов.
Несколько импульсов. Нет необходимости описывать коммутацию каждой обмотки, идея, надеюсь, понятна. Чтобы заработало нужно просто правильно собрать схему и фазировать обмотки двигателя, а также импульсные трансформаторы. Сейчас важно рассмотреть работу любой отдельной фазы для понимания механизма рекуперации энергии. Представим, что конденсатор, подключенный к обмотке фазы «А» полностью заряжен. В момент поступления на управляющий электрод тиристора сигнала, тиристор открывается. Ток начинает течь по цепи из конденсатора через обмотку и через открытый тиристор. В какой-то момент сила тока нарастает до такого состояния, что образованное вокруг катушки магнитное поле толкает ротор двигателя. Далее, энергия запасенная конденсатором начинает иссякать, его заряд постепенно истощается. В этот момент, энергия магнитного поля внутри двигателя начинает наводить вокруг фазной обмотки ЭДС самоиндукции, причем направление течения тока в цепи при этом не изменяется. Обмотка двигателя в этот момент сама становится источником энергии и начинается процесс заряда конденсатора напряжением с обратным знаком. Процесс продолжается до тех пор, пока энергия магнитного поля вокруг обмотки не иссякнет. В момент прекращения течения тока в цепи тиристор закрывается сам по себе. Поскольку открытый тиристор работает также как диод, в данной цепи не могут начаться гармонические затухающие колебания. Энергия, запасенная конденсатором (только с обратным знаком) в этот момент пригодна для последующего использования! Поскольку в схеме есть потери, требуется принятие специальных мер для постоянного пополнения запаса энергии в фазных конденсаторах, рассмотрим этот важный процесс. В тот момент, когда конденсатор фазы «А» заряжен напряжением с обратным знаком, рано или поздно, потребуется пропустить этот заряд через обмотку двигателя. Когда этот момент наступает, происходит процесс, аналогичный тому, что описан выше. Разница состоит в том, что по завершению этого процесса, на конденсаторе теперь положительное напряжение, соответствующее (по знаку) напряжению источника питания. Как отмечалось выше, в схеме всегда есть потери, поэтому напряжение на конденсаторе будет меньше исходного, т.е. напряжения питания. Поскольку знак напряжения на конденсаторе совпадает со знаком напряжения источника питания, в этот благоприятный момент целесообразно выполнить регенерацию энергии, для чего по сигналу из соседней фазы, открывается соответствующий тиристор и конденсатор пополняется энергией.
Нет необходимости описывать коммутацию каждой обмотки, идея, надеюсь, понятна. Чтобы заработало нужно просто правильно собрать схему и фазировать обмотки двигателя, а также импульсные трансформаторы. Сейчас важно рассмотреть работу любой отдельной фазы для понимания механизма рекуперации энергии. Представим, что конденсатор, подключенный к обмотке фазы «А» полностью заряжен. В момент поступления на управляющий электрод тиристора сигнала, тиристор открывается. Ток начинает течь по цепи из конденсатора через обмотку и через открытый тиристор. В какой-то момент сила тока нарастает до такого состояния, что образованное вокруг катушки магнитное поле толкает ротор двигателя. Далее, энергия запасенная конденсатором начинает иссякать, его заряд постепенно истощается. В этот момент, энергия магнитного поля внутри двигателя начинает наводить вокруг фазной обмотки ЭДС самоиндукции, причем направление течения тока в цепи при этом не изменяется. Обмотка двигателя в этот момент сама становится источником энергии и начинается процесс заряда конденсатора напряжением с обратным знаком. Процесс продолжается до тех пор, пока энергия магнитного поля вокруг обмотки не иссякнет. В момент прекращения течения тока в цепи тиристор закрывается сам по себе. Поскольку открытый тиристор работает также как диод, в данной цепи не могут начаться гармонические затухающие колебания. Энергия, запасенная конденсатором (только с обратным знаком) в этот момент пригодна для последующего использования! Поскольку в схеме есть потери, требуется принятие специальных мер для постоянного пополнения запаса энергии в фазных конденсаторах, рассмотрим этот важный процесс. В тот момент, когда конденсатор фазы «А» заряжен напряжением с обратным знаком, рано или поздно, потребуется пропустить этот заряд через обмотку двигателя. Когда этот момент наступает, происходит процесс, аналогичный тому, что описан выше. Разница состоит в том, что по завершению этого процесса, на конденсаторе теперь положительное напряжение, соответствующее (по знаку) напряжению источника питания. Как отмечалось выше, в схеме всегда есть потери, поэтому напряжение на конденсаторе будет меньше исходного, т.е. напряжения питания. Поскольку знак напряжения на конденсаторе совпадает со знаком напряжения источника питания, в этот благоприятный момент целесообразно выполнить регенерацию энергии, для чего по сигналу из соседней фазы, открывается соответствующий тиристор и конденсатор пополняется энергией.  Более крупно:
Более крупно: Двойная линия внизу - это глюк фотоаппарата. Просто "синусоида" немного покачивается, когда двигатель вращается.
Двойная линия внизу - это глюк фотоаппарата. Просто "синусоида" немного покачивается, когда двигатель вращается. Блок управления и силовая часть. Между электроникой и тиристорами импульсные трансформаторы. Толстые провода к двигателю.
Блок управления и силовая часть. Между электроникой и тиристорами импульсные трансформаторы. Толстые провода к двигателю. Банк фазных конденсаторов 3x10 мкф 250 в. К одному из них через резистор на 10 мОм подключен щуп осциллографа.
Банк фазных конденсаторов 3x10 мкф 250 в. К одному из них через резистор на 10 мОм подключен щуп осциллографа. Дроссель, через который осуществляется регенерация энергии. Рядом конденсатор 470 мкф и предохранитель. Опасные штучки!
Дроссель, через который осуществляется регенерация энергии. Рядом конденсатор 470 мкф и предохранитель. Опасные штучки! Инвертор 12 -> 200.
Инвертор 12 -> 200. В завершение, несколько видео работающего устройства:
В завершение, несколько видео работающего устройства: