Регулирование частотным приводом позволяет с помощью специального преобразователя гибко изменять режимы работы электродвигателя: производить его пуск, остановку, разгон, торможение, изменение скорости вращения.
Изменение частоты напряжения питания приводит к изменению угловой скорости магнитного поля статора. Когда частота уменьшается, скорость вращения двигателя снижается, а скольжение увеличивается.
Главным недостатком асинхронных двигателей является сложность регулирования скорости традиционными способами: изменением напряжения питания и введением в цепь обмоток дополнительных сопротивлений. Более совершенным является частотный привод электродвигателя. До недавнего времени преобразователи стоили дорого, но появление IGBT-транзисторов и микропроцессорных управляющих систем позволило зарубежным производителям создать доступные по стоимости устройства. Наиболее совершенными сейчас являются статические преобразователи частоты.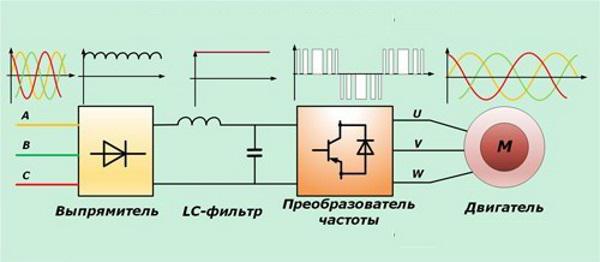
Угловая скорость магнитного поля статора ω0 меняется пропорционально частоте ƒ1 в соответствии с формулой:
ω0 = 2π׃1/p,
где p – число пар полюсов.
Способ обеспечивает плавное регулирование скорости. При этом скорость скольжения двигателя не возрастает.
Чтобы получить высокие энергетические показатели двигателя - КПД, коэффициент мощности и перегрузочную способность, вместе с частотой изменяют напряжение питания по определенным зависимостям:
Эти функции реализуются с помощью преобразователя, одновременно изменяющего частоту и напряжение на статоре двигателя. Электроэнергия экономится за счет регулирования с помощью необходимого технологического параметра: давления насоса, производительности вентилятора, скорости подачи станка и др. При этом параметры меняются плавно.
В частотно регулируемом приводе на базе асинхронных двигателей с короткозамкнутым ротором применяются два способа управления - скалярное и векторное. В первом случае одновременно изменяются амплитуда и частота питающего напряжения.
Это необходимо для поддерживания рабочих характеристик двигателя, чаще всего - постоянное отношение его максимального момента к моменту сопротивления на валу. В результате остаются неизменными КПД и коэффициент мощности во всем диапазоне вращения.
Векторное регулирование заключается в одновременном изменении амплитуды и фазы тока на статоре.
Частотный привод двигателя синхронного типа работает только при небольших нагрузках, при росте которых выше допустимых значений синхронизм может нарушиться.
Частотное регулирование обладает целым спектром преимуществ по сравнению с другими способами.
Как все инверторы, частотники являются источниками помех. В них необходимо устанавливать фильтры.
Стоимость брендов высока. Она значительно возрастает при увеличении мощности аппаратов.
На объектах, где производится перекачка воды и других жидкостей, регулировка расхода производится большей частью с помощью задвижек и клапанов. В настоящее время перспективным направлением является применение частотного привода насоса или вентилятора, приводящего в движение их лопасти.
Применение частотного преобразователя как альтернативы дроссельной заслонки дает энергосберегающий эффект до 75 %. Задвижка, сдерживая поток жидкости, не выполняет полезную работу. При этом возрастают потери энергии и вещества на его транспортировку.
Привод частотный дает возможность поддерживать у потребителя постоянное давление при изменении расхода жидкости. От датчика давления поступает сигнал на привод, который изменяет частоту вращения двигателя и тем самым регулирует его обороты, поддерживая заданный расход.
Управление насосными агрегатами производится путем изменения их производительности. Мощность потребления у насоса находится в кубической зависимости от производительности или скорости вращения колеса. Если обороты уменьшить в 2 раза, производительность насоса упадет в 8 раз. Наличие суточного графика потребления воды позволяет определить экономию электроэнергии за этот период, если производить управление частотным приводом. За счет него можно автоматизировать насосную станцию и оптимизировать тем самым давление воды в сетях. 
Максимальный расход воздуха в вентиляционных системах не всегда нужен. Условия функционирования могут потребовать снижения производительности. Традиционно для этого применяется дросселирование, когда частота вращения колеса остается постоянной. Удобней менять расход воздуха за счет частотно регулируемого привода, когда изменяются сезонные и климатические условия, выделение тепла, влаги, паров и вредных газов.
Экономия электроэнергии в системах вентиляции и кондиционирования достигается не ниже, чем у насосных станций, поскольку потребляемая мощность вращения вала находится в кубической зависимости от оборотов.
Современный частотный привод устроен по схеме двойного преобразователя. Он состоит из выпрямителя и импульсного инвертора с системой управления.
После выпрямления напряжения сети сигнал сглаживается фильтром и поступает на инвертор с шестью транзисторными ключами, где каждый из них подключен к обмоткам статора асинхронного электродвигателя. Блок преобразует выпрямленный сигнал в трехфазный нужной частоты и амплитуды. Силовые IGBT-транзисторы на выходных каскадах обладают высокой частотой переключения и обеспечивают четкий прямоугольный сигнал без искажений. За счет фильтрующих свойств обмоток двигателя форма кривой тока на их выходе остается синусоидальной.
Величина выходного напряжения регулируется двумя методами:
Второй способ применяется чаще всего в связи с развитием техники микропроцессоров. Современные инверторы изготавливаются на основе запираемых GTO-тиристоров или IGBT-транзисторов.
Частотный привод обладает многими возможностями.
 Области применения преобразователей следующие:
Области применения преобразователей следующие:
Отечественный производитель уже начал изготавливать изделия, подходящие для пользователей по качеству и цене. Преимуществом является возможность быстро получить нужный аппарат, а также подробную консультацию по настройке.
Компания "Эффективные системы" производит серийную продукцию и опытные партии оборудования. Изделия применяются для бытового использования, в малом бизнесе и в промышленности. Производитель "Веспер" выпускает семь серий преобразователей, среди которых есть многофункциональные, подходящие для большинства промышленных механизмов.
Лидером по производству частотников является датская компания Danfoss. Ее изделия используются в системах вентиляции, кондционирования, водоснабжения и отопления. Финская компания Vacon, входящая в состав датской, производит модульные конструкции, из которых можно скомпоновать необходимые устройства без лишних деталей, что позволяет сэкономить на компонентах. Известны также преобразователи международного концерна ABB, применяемые в промышленности и в быту.
Если судить по отзывам, для решения простых типовых задач можно применять дешевые отечественные преобразователи, а для сложных нужен бренд, где значительно больше настроек.
Привод частотный управляет электродвигателем путем изменения частоты и амплитуды питающего напряжения, при этом защищая его от неисправностей: перегрузок, короткого замыкания, обрывов в питающей сети. Подобные электрические приводы выполняют три основные функции, связанные с разгоном, торможением и скоростью двигателей. Это позволяет повысить эффективность оборудования во многих областях техники.
fb.ru
Наибольшее применение однофазные асинхронные электродвигатели нашли в быту и малом бизнесе. Их применение необходимо в тех областях, где нет трехфазной электрической сети. Многие компании выпускаются однофазные электродвигатели мощностью до 2 кВт и выше. Применение однофазных двигателей большей мощности ограничено мощностью бытовой сети и проблемами запуска однофазного двигателя. Приемлемое, на сегодняшний день, решение таких проблем возможно…
Устройство асинхронного энергосберегающего двигателя отличается от устройства асинхронного трехфазного двигателя. В конструкцию энергосберегающего двигателя внесены изменения, направленные на улучшение эксплуатационных характеристик для получения максимально высокого КПД. Устройство и внешний вид энергосберегающего двигателя показаны на рисунке. 2.1 Корпус; 2.2 Рым-болт; 2.4 Заземляющее устройство; 2.5 Клеммная коробка; 2.8 Подшипниковый щит; 2.10 Кожух вентилятора; 2.11 Фирменная табличка; 3.1…
Вопрос создания энергосберегающих электродвигателей возник одновременно с изобретением самих электрических машин. На Международной электротехнической выставке 1891 г. во Франкфурте-на-Майне, Чарльз Браун (впоследствии основавший компанию ABB) показал синхронный трехфазный генератор, собственного производства, КПД которого превышал 95%. Асинхронный трехфазный двигатель, представленный Михаилом Доливо-Добровольским, показал КПД 95%. С тех пор показатели КПД трехфазного асинхронного двигателя удалось улучшить всего…
Для обозначения асинхронных энергосберегающих двигателей для частотно регулируемых электроприводов используются условные обозначения, которые состоят из условного обозначения базового двигателя и цифрового кода специального конструктивного исполнения. Цифровой код специального конструктивного исполнения двигателей состоит из четырех цифр. первая цифра – кодировка конструктивного исполнения по способу охлаждения двигателя согласно ГОСТ20459 (МЭК 60034-6). 0 — IC 0141 закрытая машина…
Продолжая тему энергосбережения, необходимо подробнее рассмотреть проблемы широкого внедрения в производство современных энергосберегающих асинхронных двигателей. Основной проблемой широкого внедрения энергосберегающих систем в производство, является высокая стоимость энергосберегающих двигателей. В машиностроении, металлургии, химической, пищевой, стекольной, целлюлозно-бумажной и текстильной промышленности используется огромное число электроприводов на базе двигателей постоянного тока. Простая их замена на асинхронные энергосберегающие…
Как запускать трехфазный асинхронный двигатель от однофазной сети? Самый простой способ запуска трехфазного двигателя в качестве однофазного, основывается на подключении его третьей обмотки через фазосдвигающее устройство. В качестве такого устройство может выступать активное сопротивление, индуктивность или конденсатор. Прежде, чем подключать трехфазный двигатель в однофазную сеть, необходимо убедиться, что номинальное напряжение его обмоток соответствуют номинальному…
Способы пуска двигателей CSIR и CSCR, схемы и характеристики. Асинхронный двигатель с пусковым конденсатором (CSIR) Асинхронные двигатели с пуском через конденсатор, которые также известны как электродвигатели CSIR, составляют самую большую группу однофазных электродвигателей. Двигатели CSIR представлены несколькими типоразмерами: от самых маломощных до 1,1 кВт. В электродвигателях CSIR конденсатор последовательно соединён с пусковой обмоткой. Конденсатор…
Способы пуска двигателей RSIR и PSC, схемы и характеристики. Пуск через сопротивление или ли пусковую обмотку с повышенным сопротивлением (RSIR) Данный тип двигателей ещё известен как «электродвигатели с расщеплённой фазой». Они, как правило, дешевле однофазных электродвигателей других типов, используемых в промышленности, но у них также есть некоторые ограничения по производительности. Пусковое устройство электродвигателей RSIR…
Однофазные асинхронные двигатели чаще всего применяются в бытовой технике. Система электроснабжения построена так, что в наш дом подводится только однофазная электрическая сеть. Поэтому в бытовых сетях широко используются однофазные асинхронные двигатели. Однофазные асинхронные электродвигателям переменного тока отличает прочная конструкция, низкая стоимость, к тому же они не требуют технического обслуживания. Промышленность выпускает однофазные двигатели на небольшие…
Для модернизации гидростанции необходимо спроектировать электропривод шестеренного насоса НШ-100, техническим заданием на проект является возможность регулирования производительностью насоса в пределах от 55 до 120 л/мин. В качестве приводного электродвигателя выберем асинхронный электродвигатель с короткозамкнутым ротором, который будет управляться преобразователем частоты. Насос НШ-100 – это насос объемного типа с рабочим объемом 100 куб. см. Данный тип…
eprivod.com
ЭЛЕКТРОПРИВОДА МЕТАЛЛОРЕЖУЩИХ СТАНКОВ
Серийные станочные регулируемые асинхронные электроприводы являются преобразователями частоты с промежуточным звеном постоянного тока. Указанные электроприводы содержат на входе понижающий сетевой трансформатор и автоматический выключатель, обычно устанавливаемый на первичной стороне трансформатора. Автоматический выключатель служит для защиты от коротких замыканий и подключения электропривода к сети. Функцию защиты от коротких замыканий в некоторых электроприводах выполняют быстродействующие плавкие предохранители, а функцию нулевой защиты электропривода — контактор на входе преобразователя.
Частота вращения вспомогательного (холостого хода) асинхронного двигателя прямо пропорциональна частоте его питания. и
| Рис. 70. Характеристики двигателя: а — при изменении частоты и напряжения; б — векторная диаграмма токов |
|
|
Частота может регулироваться вверх или вниз от номинального Значения, например 50 Гц. При подаче на нагруженный двигатель номинальных частоты fтом и напряжения UHOм его обмот
ках статора протекает номинальный ток. Этому соответствует Номинальная величина индуктивного сопротивления обмоток й^ном = 2nf1H0Kb. По Мере снижения частоты одновременно уменьшается Xl. Если оставить напряжение на номинальном значении, Например 220 В, то по закону Ома начнет расти ток через обмотку статора, что может привести к ее перегоранию. Поэтому с уменьшением fi надо уменьшать напряжение на статоре U (рис. 70,а). Уменьшение напряжения U =
Если пренебречь падением напряжения на активном сопротивлении статора, то напряжение питания двигателя U можно считать равным ЭДС намагничивания двигателя Е, которая пропорциональна потоку Ф двигателя, числу витков обмотки и частоте напряжения на статоре. Так, при снижении напряжения пропорционально частоте величина потока остается близкой к номинальной. Момент двигателя пропорционален произведению тока на поток. Как известно, регулирование частоты вращения электрических двигателей вниз от номинального значения может осуществляться с постоянным (номинальным) моментом. Это обычно подразумевает работу с номинальным потоком и с постоянным (номинальным) током, т. е. при поддержании неизменным отношения U/fі регулирование производится с постоянными моментом и перегрузочной способностью. Требуемые зависимости напряжения от частоты при регулировании частоты вращения называют законами регулирования. С увеличением диапазона регулирования частоты'вращения вниз от номинальной пренебрежение падением напряжения на сопротивлении статора приводит к все большему снижению критического момента по сравнению с номинадьным. Существенная разница появляется уже при диапазоне регулирования около 1 : 3. Существуют различные способы компенсации падения напряжения на сопротивлении статора.
При компенсации падения напряжения в разомкнутой системе регулирования имеется следующее ограничение. При возрастании нагрузки от нагрузки холостого хода До номинальной увеличивается падение напряжения на сопротивлении статора, пропорциональное току. Поэтому при постоянном напряжении питания ЭДС намагничивания и соответственно поток на холостом ходу становятся больше. При существенной компенсации падения напряжения на низких частотах происходит повышение потока холостого хода и увеличение тока намагничивания. Последнее при-, водит к значительным потерям и перегреву двигателя.
Избежать указанного недостатка удается в замкнутых системах регулирования с обратными связями по параметрам", реагирующим на изменение нагрузки. Электроприводы с небольшим диапазоном регулирования частоты вращения содержат положительную обратную связь по току двигателя, воздействующую на канал регулирования напряжения. При увеличении нагрузки возрастает ток двигателя, в результате становятся больше сигнал управления (Uy — Us + Uoc, где U0c = KocI) и напряжение питания двигателя. Указанное увеличение напряжения питания двигателя компенсирует падение напряжения на сопротивлении статора. Данная система регулирования обеспечивает сохранение критического момента двигателя на уровне номинального критического. Одновременно привод обычно содержит отрицательную обратную связь по напряжению выпрямителя, которая стабилизирует напряжение на входе инвертора при колебании напряжения сети и компенсирует падение напряжения во внутреннем сопротивлении преобразователя частоты.
Развитием описанной выше системы регулирования является САР с, так называемой обратной связью по ЭДС. В данном случае из сигнала, пропорционального напряжению двигателя, вычитается сигнал, пропорциональный произведению тока на активное сопротивление статора, т. е. вычитаемое представляет собой падение напряжения на указанном сопротивлении. Результирующий сигнал отрицательной обратной связи пропорционален внутренней ЭДС двигателя, он сравнивается с задающим сигналом, пропорциональным частоте. САР поддерживает постоянство отношения упомянутой ЭДС к частоте.
В технических требованиях к электроприводам оговаривается допустимое относительное отклонение частоты вращения (отношение абсолютного падения Ап к частоте вращения холостого хода пс). В описанной выше системе регулирования поддерживается постоянным абсолютное отклонение (падение) частоты вращения, а относительное падение частоты вращения увеличивается по мере снижения заданной частоты вращения и может превысить допустимую величину. Дальнейшее уменьшение относительного •отклонения частоты вращения достигается в САР с воздействием на канал регулирования — частоту питания. Так, в системе с обратной связью по току при увеличении нагрузки возрастает управляющий сигнал по каналу частоты, повышается частота питания двигателя (двигатель переходит на более «высокую» механическую характеристику). Поэтому при том же моменте нагрузки повышается частота вращения и снижается ее отклонение относительно точки холостого хода.
В асинхронных электроприводах с более широким диапазоном регулирования применяется обратная связь по частоте вращения. Указанная обратная связь требует установки на двигателе тахогенератора или какого-либо другого типа датчика. Отрицательная обратная связь по частоте вращения может воздействовать на канал частоты и напряжения. При увеличении нагрузки первоначально падает частота вращения, увеличивается напряжение управления. Воздействие на канал напряжения преобразователя обеспечивает поддержание постоянной перегрузочной способности (и косвенно величины потока). Воздействие на канал частоты инвертора обеспечивает уменьшение нестабильности (отклонения) частоты вращения благодаря повышению частоты питания двигателя.
Качественную работу электроприводов с более широким диапазоном регулирования обеспечивают системы частотно-токового управления. В этих системах за счет обратной связи по току управляемый выпрямитель (или инвертор с ШИР или ШИМ) становится регулятором тока, двигателю задается не напряжение, а ток. Преимущество систем частотно-токового управления состоит в том, что выходной параметр регулятора (ток статора) не зависит от частоты питания двигателя, системе легче реагировать на изменение нагрузки, так как момент пропорционален абсолютному скольжению, р = [пс—п)/«сном, которое измерить проще. Такая система работает следующим образом.
В результате вычитания сигнала обратной связи по частоте вращения из задающего сигнала определяется напряжение, пропорциональное абсолютному скольжению. Сигнал абсолютного Скольжения поступает на функциональный преобразователь, который задает величину тока по одному из законов, обеспечивающих или минимальный ток, или минимальные потери двигателя. Выходной сигнал функционального преобразователя после сравнения с сигналом обратной связи по току управляет выпрямителем. Частота питания двигателя задается в виде алгебраической суммы частоты тока ротора и частоты вращения. Далее частоту тока ротора будем называть частотой ротора. САР по частотно-токовому принципу применяется, как правило, в тиристорных электроприводах с инвертором тока.
В приводах подачи некоторых станков с ЧПУ используют высокодинамичные асинхронные электроприводы с векторным управлением. Их появление связано с тем, что традиционные системы частотного регулирования перестали удовлетворять повышенным требованиям к качеству работы электроприводов и расширенному диапазону регулирования частоты вращения.
Необходимо остановиться на новом методе построения САР частотных электроприводов, получившем название векторного. Сущность метода заключается в том, чтобы систему регулирования двигателя переменного тока сделать похожей на систему регулирования двигателя постоянного тока, у которого определяющими величинами ЯВЛЯЮТСЯ ТОК в цепи якоря /я и ток в цепи обмотки возбуждения 1 в. В системе регулирования привода формируются сигналы: Iq, пропорциональный моменту двигателя (а это аналог 1Я) ■ и Id, задающий величину магнитного потока двигателя (который является аналогом /в).
Почему появилась необходимость в разработке векторной САР? Дело в том, что в отличие от двигателей постоянного тока напряжение и ток двигателей переменного тока изменяются по синусоидальной кривой. Поэтому даже при постоянной действующей величине напряжения или тока их мгновенные значения меняются. При построении САР иметь дело с синусоидально изменяющимися переменными очень трудно. Поэтому в обычных частотных системах регулировались только действующие величины переменных и это не позволяло создавать быстродействующие асинхронные электроприводы.
Зависимости, характеризующие реальный трехфазный двигатель, преобразуются к условному двухфазному двигателю. Фазы этого двигателя расположены под углом 90° друг относительно друга. Токи и напряжения этих двух фаз принимаются за проекции обобщенных параметров статора или ротора двигателя. Эти обобщенные напряжения и токи, построенные в прямоугольной системе координат, оси которой расположены (ориентированы) вдоль двух фаз статора двигателя, называются векторами. Теперь после преобразования к двухфазному двигателю токи и напряжения в векторной форме имеют такой же характер изменения, как у двигателей постоянного тока. Данная система координат является неподвижной. Для построения САР удобно иметь дело с векторами, преобразованными из неподвижной системы координат в подвижную. Одну ось координат, называемую действительной, обозначают d, другую, называемую мнимой, обозначают q (рис. 70,6). Ось d располагают, как правило, вдоль вектора потока ротора. В этом случае оказывается, что поток двигателя можно поддерживать постоянным за счет регулирования проекции тока на ось d. Так как момент двигателя пропорционален произведению потока на ток, то при условии постоянства потока момент пропорционален проекции тока на ось q, т. е. для стабилизации момента можно регулировать составляющую /8. Теперь после двух преобразований САР можно строить по аналогии с системами электроприводов постоянного тока.
САР с векторным управлением дают возможность управлять мгновенными значениями напряжений, токов и потока двигателя. Пример такой САР с частотно-токовым управлением будет описан при рассмотрении электропривода типа Размер 2М-5-2.
Регулирование частоты вращения асинхронного двигателя, так же как для двигателя постоянного тока, выполняется двухзонным. До этого шла речь о регулировании частоты вращения вниз от номинальной с постоянным моментом. Во второй зоце происходит регулирование частоты вращения вверх от номинальной. Для регулирования в режима постоянной мощности с постоянной перегрузочной способностью теоретически требуется одновременно с увеличением частоты
изменять напряжение на статоре по зависимости UIUH0H = y fjfiaou • Однако для ряда приводов с диапазоном регулирования вверх 2:1 принято U— const. При этом режим постоянства мощности обеспечивается некоторым снижением величины перегрузочной способности относительно номинальной. Ограничение максимального напряжения питания двигателя позволяет выбрать элементы преобразователя на более низкое напряжение и получить лучшие массогабаритные показатели.
Электроприводы с частотным регулированием имеют более благоприятные переходные процессы (пуск, торможение и реверс) по сравнению с нерегулируемыми асинхронными электроприводами. Как известно, пусковой момент паспортной механической характеристики двигателя меньше критического. Пусковой ток превышает номинальный в 5—8 раз, а ток, соответствующий критическому моменту, в 3—3,5 раза. В частотно-регулируемых электроприводах обеспечивается частотный пуск, который заключается в следующем. Электропривод включается на заданную частоту не сразу, а предварительно на частоту 1—5 Гц. Начальная частота выбирается таким образом, что точка критического момента соответствует нулевой частоте вращения, т. е. момент при пуске равен критическому. Далее частота питания плавно нарастает до заданного значения с таким темпом, чтобы двигатель разгонялся по линии критических моментов. Соответственно увеличивается напряжение. Так как двигатель все время пуска работает с критическим моментом, то сокращается время пуска и пуск происходит с меньшим током, в результате чего сокращаются потери. двигателя за время пуска. Преобразователь частоты обеспечивает также бесконтактный реверс. Не требуется переключения в силовой схеме контакторов, а изменяется порядок переключения силовых управляемых ключей благодаря соответствующему изменению работы системы управления инвертором.
Ряд электроприводов обеспечивает частотное рекуперативное торможение, во время которого энергия торможения двигателя передается в сеть. Другие типы электроприводов не имеют возврата (рекуперации) энергии торможения, но также обеспечивают эффективное торможение. При торможении одновременно с частотой плавно понижается напряжение.
Рассмотрим последний случай. Во время снижения частоты как при регулировании вниз, так и при торможении, в конденсатор фильтра через вентили обратного моста поступает энергия, отдаваемая двигателем. В результате повышается напряжение на конденсаторе фильтра, что опасно для элементов инвертора. Аналогичные процессы происходят при сбросе (уменьшении) нагрузки двигателя или отключении инвертора в результате действия защиты. Для предотвращения недопустимого повышения напряжения путем разряда энергии конденсатора служит цепочка из балластного резистора и транзисторного (или тиристорного) ключа, включаемого при повышении напряжения на конденсаторе сверх допустимой величины. Требуемый темп частотного пуска или торможения может регулироваться за счет обратных связей или определяться задатчиком интенсивности.
Кривая выходного напряжения ряда преобразователей имеет прямоугольноступенчатую форму, а асинхронные двигатели предназначены для питания синусоидальным напряжением. Питание двигателя прямоугольно-ступенчатым напряжением вызывает дополнительные потери и неравномерность вращения. Дополнительные потери двигателя и неравномерность вращения зависят от типа преобразователя частоты. Инверторы с формированием выходного напряжения по способу однократной коммутации вызывают заметные дополнительные потери, а на низких частотах — неравномерность вращения. Дополнительные потери вызывают ограничение допустимого по нагреву момента двигателя. Из-за существенной неравномерности вращения данный тип электропривода не применяют в станочных приводах при диапазонах регулирования частоты вращения вниз от номинальной больше 1 : (5-НІ0). Благоприятную форму выходного напряжения имеют инверторы с синусоидальной ШИМ. При соответствующем выборе несущей частоты ограничиваются дополнительные потери в двигателе и неравномерность его вращения.
Асинхронный короткозамкнутый двигатель имеет склонность к. колебаниям частоты вращения на средних частотах. При питании двигателя от преобразователя частоты в разомкнутых системах электропривода это явление усиливается. Значительное влияние на величину колебаний двигателя имеют параметры силового фильтра на выходе выпрямителя. Для подавления колебаний в электроприводах применяются обратные связи.
Для механизмов прерывистого перемещения может быть использован шаговый режим асинхронного двигателя. Этот режим осуществляется при питании двигателя от инвертора, работающего на низкой частоте. Как известно, асинхронный двигатель на частотах ниже 5 Гц входит в шаговый режим из-за прямоугольно-ступенчатой формы тока. Преобразователь частоты состоит из выпрямителя и инвертора тока. Путем разного включения силовых ключей инвертора осуществляются' различные комбинации подключения фаз двигателя к промежуточному звену постоянного тока. При этом получаются разнообразные углы поворота двигателя. Для обеспечения требуемого угла поворота выбирается двигатель с определенным числом пар полюсов.
Описанные выше вопросы характерны для всех электроприводов с частотным управлением, устанавливаемых на металлообрабатывающих станках. Рассмотрим работу серийных асинхронных электроприводов, предназначенных для трехфазной сети напряжением 380 В и частотой 50 Гц.
Цилиндрический редуктор - простое и эффективное решение для ступенчатого снижения числа оборотов и повышения крутящего момента.
Разборка и сборка электроприводов серии ПМСМ (1—3-й типы размеров). При разборке следует освободить выходной конец вала агрегата от шкива или другого соединительного устройства; снять щеткодержатель 7 (см. рис. 55, а) …
Наладка выпрямителей и их систем управления, входящих в преобразователи частоты, проводится по той же методике, как и в случае электроприводов постоянного тока. При наладке инверторов должны применяться высокочастотные осциллографы. Для …
msd.com.ua
Министерство образования и науки Украины
ОДЕССКАЯ ГОСУДАРСТВЕННАЯ АКАДЕМИЯ ХОЛОДА
КАФЕДРА ЭЛЕКТРОТЕХНИКИ И ЭЛЕКТРОННЫХ УСТРОЙСТВ
РАСЧЕТНО-ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовому проекту
«ЭЛЕКТРОПРИВОД ПО СХЕМЕ ПРЕОБРАЗОВАТЕЛЬ
ЧАСТОТЫ - АСИНХРОННЫЙ ДВИГАТЕЛЬ»
по дисциплине
элементы и системы автоматизированногоэлектропривода
Оглавление
Введение
1. Исходные данные и Построение нагрузочной диаграммы исполнительного механизма
2. Выбор элементов силовой схемы
2.1 Выбор двигателя и определение его параметров
2.2 Выбор автоматического воздушного выключателя
2.3 Выбор преобразователя частоты
3. Расчет механических характеристик
3.1 Параметры механических характеристик
3.2 Естественная характеристика
3.3 Искусственные характеристики
3.4 Искусственные характеристики при пониженном напряжении
3.5 Механические характеристики при экстренном торможении
4. Оценка необходимости применения обратной связи по скорости
5. Определение среднего КПД системы
6. Переходные процессы в электроприводе
Вывод
Список литературы
Введение
В настоящее время практически любой производственный механизм приводится в действие автоматизированной системой, одним из основных элементов которой, непосредственно преобразующим электрическую энергию в механическую, является электрический двигатель. При помощи соответствующих преобразовательных и управляющих устройств формируются требуемые статические и динамические характеристики исполнительных органов рабочей машины.
Типичная электромеханическая система включает электрический двигатель, а также преобразовательное, передаточное и управляющее устройства, предназначенные для приведения в движение и управления исполнительным органом рабочей машины.
Речь идет не только о сообщении рабочему органу вращательного или поступательного движения, но, главным образом, об обеспечении оптимального режима работы системы в целом, при котором достигается наибольшая производительность при требуемой точности.
В данном курсовом проекте рассматривается электротехническая система переменного тока, использующая короткозамкнутый асинхронный двигатель, питающийся от полупроводникового преобразователя частоты.
Широкому распространению данной системы способствовало появление сравнительно дешевых и достаточно мощных (до 300 кВт в серийном варианте) транзисторных (реже – тиристорных) преобразователей частоты (ПЧ).
Частотный способ регулирования является наиболее перспективным и широко используемым в настоящее время способом регулирования скорости АД. Изменяя частоту f1 питающего напряжения, можно, в соответствии с выражением ω0 = 2. p. f1 /p, изменять угловую скорость вращения магнитного поля, получая тем самым различные искусственные характеристики асинхронного двигателя.
Этот способ обеспечивает плавное регулирование в широком диапазоне, получаемые характеристики обладают высокой жесткостью. Электрические потери в роторе, связанные со скольжением, в этом случае невелики, поэтому частотный способ наиболее экономичен.
Для лучшего использования АД и получения высоких энергетических показателей его работы – коэффициента мощности, коэффициента полезного действия и перегрузочной способности – одновременно с изменением частоты приложенного напряжения, необходимо изменять и его величину.
Применяются различные законы изменения напряжения в зависимости от характера нагрузки. Часто исходят из условия сохранения постоянной перегрузочной способности l, которая равна отношению критического момента Мк к моменту нагрузки Мс — l = Мк / Мс = const.
Система ПЧ-АД, по своим рабочим свойствам приближаясь к системам постоянного тока, одновременно сохраняет все преимущества асинхронного двигателя, как-то - надежность, долговечность, высокую перегрузочную способность, отсутствие щеточного контакта (а значит и искрения) и т.п.
1. Исходные данные и построение нагрузочной диаграммы исполнительного механизма

2. Выбор элементов силовой схемы
2.1 Выбор двигателя и определение его параметров
2.1.1 Определение мощности двигателя
Асинхронный двигатель выбираем (табл.П2) таким образом, чтобы его номинальный момент был больше максимального момента, найденного из нагрузочной диаграммы.

Видим, что приведенная нагрузочная характеристика системы ПЧ-АД соответствует нагрузочной характеристике механизма, так как для всех скоростей удовлетворяется неравенство Mad>M1mex.
2.1.2 Параметры и характеристики двигателя
С учетом необходимого запаса мощности выбираем четырехполюсный асинхронный двигатель 4A160S4 со следующими параметрами:

2.1.3 Параметры Г-образной схемы замещения

Параметры Т-образной схемы замещения.
Т – образная схема замещения трехфазной (m1 =3) асинхронной машины строится для одной фазы, и, по существу, аналогична схеме замещения трансформатора (рис. 1).

Рис. 1 Схема замещения асинхронной машины
Здесь: U1 - фазное напряжение, В;
R1 и R2 ’ – активные сопротивления первичной и вторичной обмоток;
X1 = ω1. L1σ и X2 ’ = ω1. L2 ’σ – индуктивные сопротивления рассеяния первичной и вторичной обмоток, где ω1 = 2. π. f1 – циклическая частота сети, а f1 – частота сети;
Xm и Rm – индуктивное сопротивление намагничивающей ветви, обусловленное основным магнитным потоком, и активное сопротивление, искусственно вносимое в схему замещения для учета магнитных потерь в ферромагнитных частях магнитопровода;
I1 , I2 ’ – фазные токи в обмотках статора и ротора;
Im - ток намагничивания, создающий основной магнитный поток Фm ;
Здесь индекс «штрих» (‘), относящийся ко вторичной обмотке, обозначает, что данная величина приведена к первичной обмотке.

2. 2 Выбор автоматического воздушного выключателя
Силовые выключатели служат для распределения электроэнергии в низковольтных установках в качестве аппаратов защиты питающих линий и потребителей. Они защищают от перегрузки и короткого замыкания установки, двигатели, генераторы и трансформаторы. Предназначены для коммутации и защиты установок, двигателей, трансформаторов и конденсаторов.
Выбор автоматического воздушного выключателя осуществляется по номинальному току двигателя.
Для этой цели могут быть использованы трехфазные силовые автоматические выключатели серии 3 VF фирмы SIMENS . Ток уставки теплового расцепителя устанавливается на 30% больше номинального тока двигателя Iu = 1.3 In

2.3 Выбор преобразователя частоты
Частотный способ регулирования является наиболее перспективным и широко используемым в настоящее время способом регулирования скорости АД. Принцип его заключается в том, что изменяя частоту питающего напряжения f1, можно, в соответствии с выражением ω0 = 2..f1/p, изменять угловую скорость вращения магнитного поля (синхронную скорость вращения ротора), получая тем самым различные искусственные характеристики.
Этот способ обеспечивает плавное регулирование в широком диапазоне, получаемые характеристики обладают высокой жесткостью. Электрические потери в роторе, связанные со скольжением, в этом случае невелики, поэтому частотный способ наиболее экономичен
3. Расчет механических характеристик
3.1 Параметры механических характеристик
Все механические характеристики двигателя строятся совместно с механической нагрузочной характеристикой механизма, приведенной к валу двигателя.
Вначале находим жесткость естественной механической характеристики двигателя
 ,
, где Mo и о – момент и скорость холостого хода, а Mn и n – момент и скорость при номинальной нагрузке.

3.2 Естественная характеристика
Для построения естественной механической характеристики(рис.5) используем формулу для момента асинхронной машины М(), в которой явно показана зависимость момента от частоты (f) и напряжения (U):

Здесь: s (,0 ) = 1 - /0 – скольжение; - текущее значение угловой скорости; 0 =2f/p– угловая скорость магнитного поля при данной частоте f; р – число пар полюсов; m – число фаз, для трехфазного двигателя m =3; U – текущее значение фазного напряжения; R1 и R2’ – активные сопротивления, а L1 и L2’ – индуктивности первичной и вторичной (приведенной к первичной) обмоток.
mirznanii.com
Асинхронные электроприводы с диапазоном регулирования скорости до D=100:1 и высокими требованиями к динамике, когда осуществляются частые пуски, торможения и реверсы, выполняются как системы с частотно-токовым управлением. В таких системах преобразователь частоты работает в режиме источника тока. Это достигается применением преобразователей частоты типа ПЧТ или преобразователей частоты типа ПЧН, которые охватываются отрицательной обратной связью по току. Системы регулирования осуществляет задание частоты и величины тока статора в соответствии с заданной скоростью и нагрузкой на валу двигателя. Фазное напряжение статора при питании от источника тока является неконтролируемым параметром. На рис.16.2 приведена схема замещения и векторная диаграмма асинхронного двигателя при питании от источника тока. Из векторной диаграммы следует, что при I1=const с уменьшением скольжения и, следовательно, момента на валу двигателя, ток намагничивания Iμ растет до значения равного I1. Двигатель переходит в режим насыщения. Во избежание этого ток статора I1 следует соответствующим образом регулировать в зависимости от величины тока  , пропорционального моменту двигателя.
, пропорционального моменту двигателя.
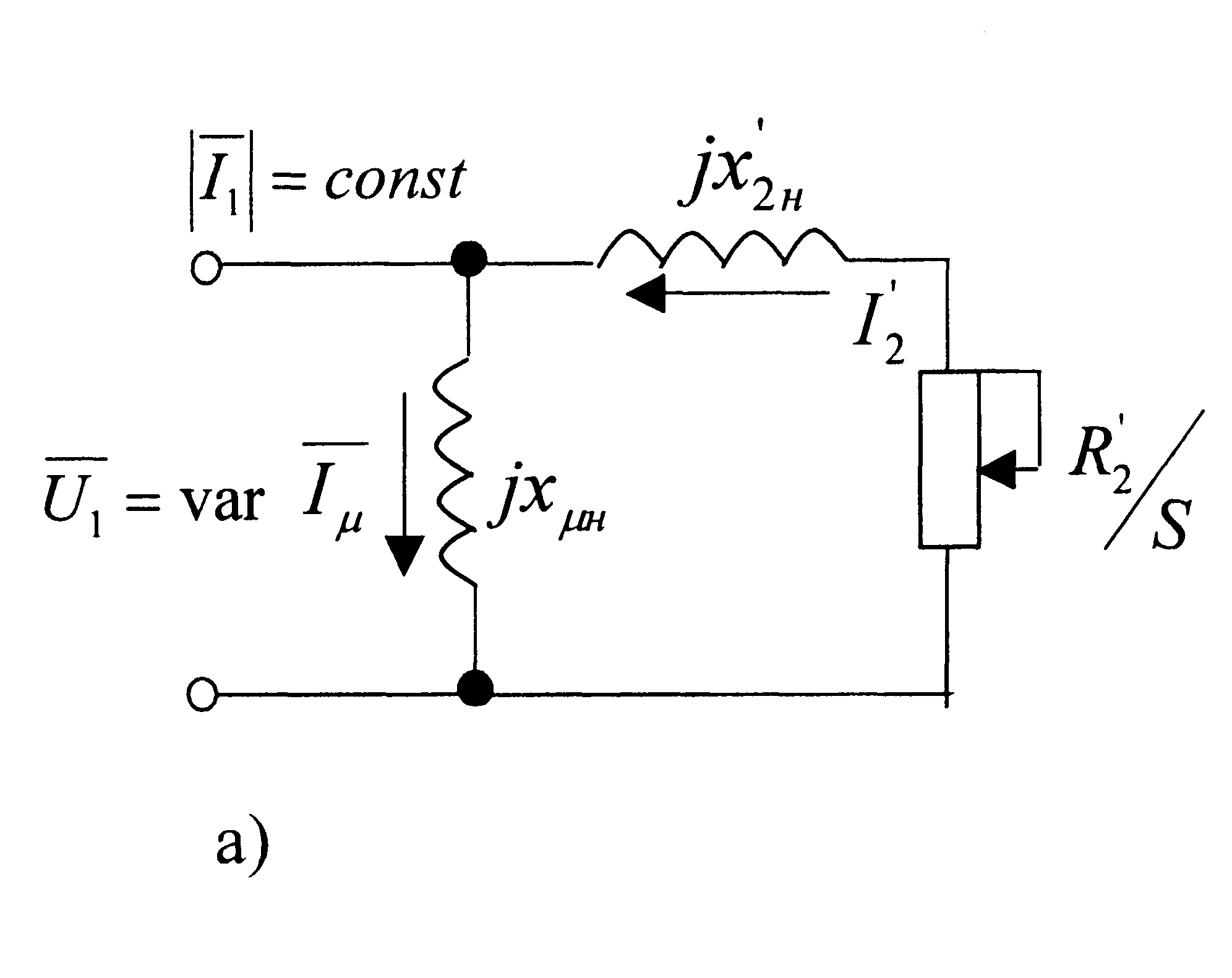

Рис.16.2. Схема замещения и векторная диаграмма при питании асинхронного двигателя от источника тока
При питании асинхронного двигателя от источника тока ток статора и потокосцепление в зазоре  в установившихся режимах работы связаны следующим соотношением
в установившихся режимах работы связаны следующим соотношением
 , (16.1)
, (16.1)
где: Lm – индуктивность цепи намагничивания;
Lrl – индуктивность рассеяния обмотки ротора;
 - абсолютное скольжение.
- абсолютное скольжение.
Поэтому в системах асинхронного электропривода с частотно-токовым управлением необходимо функционально связать ток статора с величиной абсолютного скольжения в соответствии с (16.1). Если при этом механические характеристики двигателя должны иметь постоянный критический момент, то потокосцепление  должно быть постоянным. Для этого случая графическая зависимостьI1=f(sабс) представлена на рис.16.3.
должно быть постоянным. Для этого случая графическая зависимостьI1=f(sабс) представлена на рис.16.3.
Ф ункциональная схема асинх-ронного электропривода с частотно-токовым управлением приведена на рис.16.4. В этой схеме имеется опти-мизированный контур регулирования тока статораI1 и разомкнутый канал регулирования скорости, в котором задается скорость идеального холостого хода ω0, соответствующая скорости вращения поля статора при данной частоте. На входе контура тока включен функциональный преобразователь ФП, реализующий зависимость I1з=f(sабс). Сигнал абсолютного скольжения
ункциональная схема асинх-ронного электропривода с частотно-токовым управлением приведена на рис.16.4. В этой схеме имеется опти-мизированный контур регулирования тока статораI1 и разомкнутый канал регулирования скорости, в котором задается скорость идеального холостого хода ω0, соответствующая скорости вращения поля статора при данной частоте. На входе контура тока включен функциональный преобразователь ФП, реализующий зависимость I1з=f(sабс). Сигнал абсолютного скольжения  вычисляется в сумматоре на входе ФП как
вычисляется в сумматоре на входе ФП как .
.

Жесткость механических характеристик в системе электропривода по схеме рис.16.4 близка к жесткости естественной механической характеристики асинхронного двигателя. Поэтому достижимый диапазон регулирования скорости в этой системе может составить примерно D=20:1.
При необходимости получения большого диапазона регулирования следует внести в систему замкнутый контур регулирования скорости, как это показано на функциональной схеме рис.16.5. Данная система управления является двухканальной и содержит контур скорости и контур тока, которые настраиваются на модульный оптимум. На выходе регулятора скорости формируется сигнал, пропорциональный частоте питания f1 и скорости вращения поля статора. Вычитая из этого сигнала значение действительной скорости  , формируется сигнал, пропорциональный абсолютному скольжению, который подается на вход ФП. Функциональный преобразователь в соответствии с зависимостью указанной на рис.16.3 вырабатывает сигнал задания тока статора, который подается на вход контура тока, имеющего ПИ-регулятор. Частотно-токовое управление может применяться только для однодвигательных электроприводов.
, формируется сигнал, пропорциональный абсолютному скольжению, который подается на вход ФП. Функциональный преобразователь в соответствии с зависимостью указанной на рис.16.3 вырабатывает сигнал задания тока статора, который подается на вход контура тока, имеющего ПИ-регулятор. Частотно-токовое управление может применяться только для однодвигательных электроприводов.

studfiles.net
Министерство образования и науки Украины
ОДЕССКАЯ ГОСУДАРСТВЕННАЯ АКАДЕМИЯ ХОЛОДА
КАФЕДРА ЭЛЕКТРОТЕХНИКИ И ЭЛЕКТРОННЫХ УСТРОЙСТВ
РАСЧЕТНО-ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовому проекту
«ЭЛЕКТРОПРИВОД ПО СХЕМЕ ПРЕОБРАЗОВАТЕЛЬ
ЧАСТОТЫ — АСИНХРОННЫЙ ДВИГАТЕЛЬ»
по дисциплине
элементы и системы автоматизированногоэлектропривода
Оглавление
Введение
1. Исходные данные и Построение нагрузочной диаграммы исполнительного механизма
2. Выбор элементов силовой схемы
2.1 Выбор двигателя и определение его параметров
2.2 Выбор автоматического воздушного выключателя
2.3 Выбор преобразователя частоты
3. Расчет механических характеристик
3.1 Параметры механических характеристик
3.2 Естественная характеристика
3.3 Искусственные характеристики
3.4 Искусственные характеристики при пониженном напряжении
3.5 Механические характеристики при экстренном торможении
4. Оценка необходимости применения обратной связи по скорости
5. Определение среднего КПД системы
6. Переходные процессы в электроприводе
Вывод
Список литературы
Введение
В настоящее время практически любой производственный механизм приводится в действие автоматизированной системой, одним из основных элементов которой, непосредственно преобразующим электрическую энергию в механическую, является электрический двигатель. При помощи соответствующих преобразовательных и управляющих устройств формируются требуемые статические и динамические характеристики исполнительных органов рабочей машины.
Типичная электромеханическая система включает электрический двигатель, а также преобразовательное, передаточное и управляющее устройства, предназначенные для приведения в движение и управления исполнительным органом рабочей машины.
Речь идет не только о сообщении рабочему органу вращательного или поступательного движения, но, главным образом, об обеспечении оптимального режима работы системы в целом, при котором достигается наибольшая производительность при требуемой точности.
В данном курсовом проекте рассматривается электротехническая система переменного тока, использующая короткозамкнутый асинхронный двигатель, питающийся от полупроводникового преобразователя частоты.
Широкому распространению данной системы способствовало появление сравнительно дешевых и достаточно мощных (до 300 кВт в серийном варианте) транзисторных (реже – тиристорных) преобразователей частоты (ПЧ).
Частотный способ регулирования является наиболее перспективным и широко используемым в настоящее время способом регулирования скорости АД. Изменяя частоту f1 питающего напряжения, можно, в соответствии с выражением ω0= 2. p. f1 /p, изменять угловую скорость вращения магнитного поля, получая тем самым различные искусственные характеристики асинхронного двигателя.
Этот способ обеспечивает плавное регулирование в широком диапазоне, получаемые характеристики обладают высокой жесткостью. Электрические потери в роторе, связанные со скольжением, в этом случае невелики, поэтому частотный способ наиболее экономичен.
Для лучшего использования АД и получения высоких энергетических показателей его работы – коэффициента мощности, коэффициента полезного действия и перегрузочной способности – одновременно с изменением частоты приложенного напряжения, необходимо изменять и его величину.
Применяются различные законы изменения напряжения в зависимости от характера нагрузки. Часто исходят из условия сохранения постоянной перегрузочной способности l, которая равна отношению критического момента Мк к моменту нагрузки Мс — l = Мк / Мс = const.
Система ПЧ-АД, по своим рабочим свойствам приближаясь к системам постоянного тока, одновременно сохраняет все преимущества асинхронного двигателя, как-то — надежность, долговечность, высокую перегрузочную способность, отсутствие щеточного контакта (а значит и искрения) и т.п.
1. Исходные данные и построение нагрузочной диаграммы исполнительного механизма
2. Выбор элементов силовой схемы
2.1 Выбор двигателя и определение его параметров
2.1.1 Определение мощности двигателя
Асинхронный двигатель выбираем (табл.П2) таким образом, чтобы его номинальный момент был больше максимального момента, найденного из нагрузочной диаграммы.
Видим, что приведенная нагрузочная характеристика системы ПЧ-АД соответствует нагрузочной характеристике механизма, так как для всех скоростей удовлетворяется неравенство Mad>M1mex.
2.1.2 Параметры и характеристики двигателя
С учетом необходимого запаса мощности выбираем четырехполюсный асинхронный двигатель 4A160S4 со следующими параметрами:
2.1.3 Параметры Г-образной схемы замещения
Параметры Т-образной схемы замещения.
Т – образная схема замещения трехфазной (m1 =3) асинхронной машины строится для одной фазы, и, по существу, аналогична схеме замещения трансформатора (рис. 1).
Рис. 1 Схема замещения асинхронной машины
Здесь: U1 — фазное напряжение, В;
R1 и R2 ’ – активные сопротивления первичной и вторичной обмоток;
X1 = ω1. L1σ и X2 ’ = ω1. L2 ’σ – индуктивные сопротивления рассеяния первичной и вторичной обмоток, где ω1 = 2. π. f1 – циклическая частота сети, а f1 – частота сети;
Xm и Rm – индуктивное сопротивление намагничивающей ветви, обусловленное основным магнитным потоком, и активное сопротивление, искусственно вносимое в схему замещения для учета магнитных потерь в ферромагнитных частях магнитопровода;
I1, I2 ’ – фазные токи в обмотках статора и ротора;
Im — ток намагничивания, создающий основной магнитный поток Фm;
Здесь индекс «штрих» (‘), относящийся ко вторичной обмотке, обозначает, что данная величина приведена к первичной обмотке.
2. 2 Выбор автоматического воздушного выключателя
Силовые выключатели служат для распределения электроэнергии в низковольтных установках в качестве аппаратов защиты питающих линий и потребителей. Они защищают от перегрузки и короткого замыкания установки, двигатели, генераторы и трансформаторы. Предназначены для коммутации и защиты установок, двигателей, трансформаторов и конденсаторов.
Выбор автоматического воздушного выключателя осуществляется по номинальному току двигателя.
Для этой цели могут быть использованы трехфазные силовые автоматические выключатели серии 3 VF фирмы SIMENS . Ток уставки теплового расцепителя устанавливается на 30% больше номинального тока двигателя Iu = 1.3 In
2.3 Выбор преобразователя частоты
Частотный способ регулирования является наиболее перспективным и широко используемым в настоящее время способом регулирования скорости АД. Принцип его заключается в том, что изменяя частоту питающего напряжения f1, можно, в соответствии с выражением ω0 = 2..f1/p, изменять угловую скорость вращения магнитного поля (синхронную скорость вращения ротора), получая тем самым различные искусственные характеристики.
Этот способ обеспечивает плавное регулирование в широком диапазоне, получаемые характеристики обладают высокой жесткостью. Электрические потери в роторе, связанные со скольжением, в этом случае невелики, поэтому частотный способ наиболее экономичен
3. Расчет механических характеристик
3.1 Параметры механических характеристик
Все механические характеристики двигателя строятся совместно с механической нагрузочной характеристикой механизма, приведенной к валу двигателя.
Вначале находим жесткость естественной механической характеристики двигателя
,
где Mo и о – момент и скорость холостого хода, а Mn и n – момент и скорость при номинальной нагрузке.
3.2 Естественная характеристика
Для построения естественной механической характеристики(рис.5) используем формулу для момента асинхронной машины М(), в которой явно показана зависимость момента от частоты (f) и напряжения (U):
Здесь: s (,0) = 1 — /0– скольжение; — текущее значение угловой скорости; 0 =2f/p– угловая скорость магнитного поля при данной частоте f; р – число пар полюсов; m – число фаз, для трехфазного двигателя m =3; U – текущее значение фазного напряжения; R1 и R2’ – активные сопротивления, а L1 и L2’ – индуктивности первичной и вторичной (приведенной к первичной) обмоток.
С помощью формулы для момента асинхронной машины строим естественную механическую характеристику привода для номинальных значений напряжения и частоты. На этом же графике строится нагрузочная характеристика механизма.
Определив параметры естественной механической характеристики строим график зависимости моментов от угловых скоростей:
3.3 Механическая характеристика при экстренном торможении
Экстренное торможение осуществляется в режиме динамического торможения, при котором в обмотку статора — например на зажимы А и ВС, соединенные вместе, подается постоянный ток. Предварительно необходимо задаться кратностью тока динамического торможения Idt по отношению к номинальномуКid = Idt / In, которую выбирают в интервале 1.8 – 2.2 ( например Кid = 2) и рассчитать величину тормозного тока, величину эквивалентного тока Ie и добавочного сопротивления
4. Оценка необходимости применения обратной связи по скорости
5. Определение среднего КПД системы
Средний КПД электропривода определяется как произведение КПД двигателя, преобразователя частоты и исполнительного механизма: ср = д. пч. m .
6. Переходные процессы в электроприводе
Анализ переходных процессов выполняется с помощью программы Matlab. В среде Matlab собрали модель (рис.9), задали требуемые параметры(рис.10) ее элементов и выполнить расчет переходного процесса для случая частотного пуска ненагруженного двигателя с последующим 100% увеличением нагрузки.
Блок Step осуществляет скачкообразный наброс нагрузки по окончании пуска.
Широтно-импульсный преобразователь вырабатывает переменную частоту, при частоте треугольной волны модуляции обычно выбираемой в диапазоне 1500-3000 Гц.
Амплитуда напряжения задается блоками RelayA, RelayB и Relay С, и равна 220√2.
Связь блоков Simulink и PSB осуществляется через управляемые источники напряжения ControlledVoltageSourceVao, Vbo и Vco.
Основной особенностью данной модели является возможность наблюдать работу асинхронного короткозамкнутого двигателя от преобразователя частоты, который изменяет одновременно как напряжение, так и частоту, в соответствии с заданными законами.
Изменение напряжения и частоты в функции времени задается блоками Fcn и Fcn1, соответственно. На их входы подается время, а выходы определяют напряжение и частоту (в относительных единицах), подводимые к двигателю.
Обычно несколько лучшие результаты (с точки зрения сокращения времени пуска при допустимых бросках тока и момента) получаются, если скорость возрастания напряжения немного больше скорости возрастания частоты.
Зависимости напряжения v(t) и частоты f(t) (в о.е.) от времени t при пуске могут быть приняты линейными c ограничениями ( которые реализуются с помощью блоков saturation)
v(u) = kv.u; f(u) = kf.u, при ограничениях v(u) <1 и f(u) <1,
экспоненциальными с одной постоянной времени Т
v(u) = f(u) = 1- .exp(-.u/T),
или экспоненциальными с двумя (близкими по величине) постоянными времени Т1 и Т2 (Т1>Т2),
что при правильном выборе постоянных времени Т1 и Т2 дает, при несколько увеличенном времени пуска, минимальные броски тока и момента.
Здесь во всех формулах вместо времени t подставлена u – стандартная входная переменная блока Fcn. Экспоненциальный характер изменения v(t) и f(t) для Т=0.2 (экран Scopev*,f*) показан на рис.11. Одновременно на экране ScopeVabm можно видеть характер изменения напряжения, приложенного к статорной обмотке двигателя во время пуска (рис.12).
Промоделируем систему без наброса нагрузки чтобы оценить параметры переходного процесса по скорости(рис 15):
Установившася скорость ωуст =157,5
Время 1го согласования t1 =0.59c
Время переходного процесса τр =1,03с
Перерегулирование
Изменяя параметры модели, проследим их влияние пусковые параметры, такие как время пуска и пусковые броски тока и момента.
Увеличив в полтора раза момент нагрузки и момент инерции, моделируя тем самым незапланированный наброс дополнительной нагрузки на вал двигателя проследим переходные процессы скорости ω(t) и момента Te(t), а также графики токов статора is(t) и ротора ir(t) при частотном пуске(рис16, 17).
Из графиков(рис16, 17) видно, что повышение момента инерции и величины нагрузки негативно влияют на пульсацию, и амплитуду роторных и статорных токов, а так же увеличивает время переходных процессов. Однако выбранный двигатель справляется с нагрузкой. Таким образом можно считать допустимым не продолжительное увеличение нагрузки. Так как амплитуда тока превышает ток теплового расцепления автомата, длительная работа в данном режиме не предусмотрена.
Обычно несколько лучшие результаты (с точки зрения сокращения времени пуска при допустимых бросках тока и момента) получаются, если скорость возрастания напряжения немного больше скорости возрастания частоты. По этому в исходной модели увеличим скорость изменения напряжения на 50%(рис.18, 19, 20) и проанализируем основные параметры пуска(рис.21, 22)
Промоделируем систему без наброса нагрузки чтобы оценить параметры переходного процесса по скорости(рис 23):
Установившася скорость ωуст =157,5
Время 1го согласования t1 =0.43c
Время переходного процесса τр =1,04с
Перерегулирование
Таким образом при увеличении скорости изменения напряжения мы значительно уменьшаем время первого согласования по скорости и время пусковых токов статора и ротора. Следовательно мы можем уменьшить время наброса нагрузки с 1 до 0,6с. При этом значение перерегулирования по скорости не превышает 20%, а величина пусковых токов не превышает номинальные, что положительно сказывается на эксплуатационных характеристиках двигателя.
Вывод
Мы приобрели навыки для решения инженерных задач по расчету и проектированию систем автоматизированного электропривода в статических и динамических режимах, а так же навыков расчета параметров в программном пакете Mathcad и моделирования в программном пакете MatlabSimulink системы электропривода «преобразователь частоты-асинхронный двигатель».
В ходе разработки электропривода мы достигли диапазона регулирования скорости от 30 до 300 рад/с.
В процессе моделирования при разных параметрах системы мы проследили переходные процессы и дали им характеристику. Мы так же сделали следующие выводы:
· Повышение момента инерции и величины нагрузки негативно влияют на пульсацию, и амплитуду роторных и статорных токов, а так же увеличивает время переходных процессов. Однако выбранный двигатель справляется с нагрузкой. Таким образом можно считать допустимым не продолжительное увеличение нагрузки. Так как амплитуда тока превышает ток теплового расцепления автомата, длительная работа в данном режиме не предусмотрена.
· При увеличении скорости изменения напряжения мы значительно уменьшаем время первого согласования по скорости и время пусковых токов статора и ротора. Следовательно мы можем уменьшить время наброса нагрузки с 1 до 0,6с. При этом значение перерегулирования по скорости не превышает 20%, а величина пусковых токов не превышает номинальные, что положительно сказывается на эксплуатационных характеристиках двигателя.
Для достижения минимального времени пуска нужно увеличивать скорость изменения частоты и напряжения и уменьшить момент инерции. При этом необходимо следить за пульсацией и амплитудами токов статора и ротора.
Список литературы
1. Методические указания к курсовому проекту «Электропривод по схеме преобразователь частоты — асинхронный двигатель»
2. Конспект лекций по курсу «Элементы и системы автоматизированного управления»
3. Методические указания к лабораторным работам по курсу «Элементы и системы автоматизированного управления»
www.ronl.ru
НТЦ Энерго-Ресурс предлагает высококачественную шинную продукцию отечественного производства, не уступающую по качеству лучшим мировым маркам, но по существенно более низким ценам, которые не зависят от курса валют.

Шинопроводы

Шины алюминиевые твердые изолированные ШАТИ

Компенсаторы шинные пластинчатые и плетеные

Шины медные гибкие изолированные ШМГИ

Шины медные твердые луженые ШМТЛ

Шинодержатели универсальные

Шины медные гибкие в изоляции на 10 кВ ШМГИ-10

Шины медные плетеные ШМП

Изоляторы опорные и проходные. Индикаторы наличия напряжения

Шины медные твердые изолированные ШМТИ

Компенсаторы шинные пластинчатые

Пластины переходные и крепежные
По теме
Калькулятор веса электротехнических шин
Обработка медных и алюминиевых шин
Выбор инструмента для обработки электротехнических шин
Популярные товары
Шины медные гибкие изолированные ШМГИ
Шины медные плетеные ШМП
Компенсаторы шинные медные
Изоляторы опорные и проходные
en-res.ru