





Трехфазные асинхронные двигатели нашли самое широкое применение в промышленности и других областях. Современное оборудование просто невозможно представить без этих агрегатов. Одной из важнейших составляющих рабочего цикла машин и механизмов является их плавный пуск и такая же плавная остановка после выполнения поставленной задачи. Такой режим обеспечивается путем использования преобразователей частоты. Эти устройства проявили себя наиболее эффективными в больших электродвигателях, обладающих высокой мощностью.
С помощью преобразователей частоты успешно выполняется регулировка пусковых токов, с возможностью контроля и ограничения их величины до нужных значений. Для правильного использования данной аппаратуры необходимо знать принцип работы частотного преобразователя для асинхронного двигателя. Его применение позволяет существенно увеличить срок службы оборудования и снизить потери электроэнергии. Электронное управление, кроме мягкого пуска, обеспечивает плавную регулировку работы привода в соответствии с установленным соотношением между частотой и напряжением.
Основной функцией частотных преобразователей является плавная регулировка скорости вращения асинхронных двигателей. С этой целью на выходе устройства создается трехфазное напряжение с переменной частотой.

Преобразователи частоты нередко называются инверторами. Их основной принцип действия заключается в выпрямлении переменного напряжения промышленной сети. Для этого применяются выпрямительные диоды, объединенные в общий блок. Фильтрация тока осуществляется конденсаторами с высокой емкостью, которые снижают до минимума пульсации поступающего напряжения. В этом и заключается ответ на вопрос для чего нужен частотный преобразователь.
В некоторых случаях в схему может быть включена так называемая цепь слива энергии, состоящая из транзистора и резистора с большой мощностью рассеивания. Данная схема применяется в режиме торможения, чтобы погасить напряжение, генерируемое электродвигателем. Таким образом, предотвращается перезарядка конденсаторов и преждевременный выход их из строя. В результате использования частотников, асинхронные двигатели успешно заменяют электроприводы постоянного тока, имеющие серьезные недостатки. Несмотря на простоту регулировки, они считаются ненадежными и дорогими в эксплуатации. В процессе работы постоянно искрят щетки, а электроэрозия приводит к износу коллектора. Двигатели постоянного тока совершенно не подходят для взрывоопасной и запыленной среды.

В отличие от них, асинхронные двигатели значительно проще по своему устройству и надежнее, благодаря отсутствию подвижных контактов. Они более компактные и дешевые в эксплуатации. К основному недостатку можно отнести сложную регулировку скорости вращения традиционными способами. Для этого было необходимо изменять питающее напряжение и вводить дополнительные сопротивления в цепь обмоток. Кроме того, применялись и другие способы, которые на практике оказывались неэкономичными и не обеспечивали качественной регулировки скорости. Но, после того как появился преобразователь частоты для асинхронного двигателя, позволяющий плавно регулировать скорость в широком диапазоне, все проблемы разрешились.
Одновременно с частотой изменяется и подводимое напряжение, что позволяет увеличить КПД и коэффициент мощности электродвигателя. Все это позволяет получить высокие энергетические показатели асинхронных двигателей, продлить срок их эксплуатации.
Эффективное и качественное управление асинхронными электродвигателями стало возможно за счет использования совместно с ними частотных преобразователей. Общая конструкция представляет собой частотно-регулируемый привод, который позволил существенно улучшить технические характеристики машин и механизмов.

В качестве управляющего элемента данной системы выступает преобразователь частоты, основной функцией которого является изменение частоты питающего напряжения. Его конструкция выполнена в виде статического электронного узла, а формирование переменного напряжения с заданной изменяемой частотой осуществляется на выходных клеммах. Таким образом, за счет изменения амплитуды напряжения и частоты регулируется скорость вращения электродвигателя.
Управление асинхронными двигателями осуществляется двумя способами:
Для того чтобы преобразователь частоты для асинхронного двигателя в полном объеме выполнял свои функции, его необходимо правильно подключить и настроить. В самом начале подключения в сети перед прибором размещается автоматический выключатель. Его номинал должен совпадать с величиной тока, потребляемого двигателем. Если частотник предполагается эксплуатировать в трехфазной сети, то автомат также должен быть трехфазным, с общим рычагом. В этом случае при коротком замыкании на одной из фаз можно оперативно отключить и другие фазы.

Ток срабатывания должен обладать характеристиками, полностью соответствующими току отдельной фазы электродвигателя. Если частотный преобразователь планируется использовать в однофазной сети, в этом случае рекомендуется воспользоваться одинарным автоматом, номинал которого должен в три раза превышать ток одной фазы. Независимо от количества фаз, при установке частотника, автоматы не должны включаться в разрыв заземляющего или нулевого провода. Рекомендуется использовать только прямое подключение.
При правильной настройке и подключении частотного преобразователя, его фазные провода должны соединяться с соответствующими контактами электродвигателя. Предварительно обмотки в двигателе соединяются по схеме «звезда» или «треугольник», в зависимости от напряжения, выдаваемого преобразователем. Если оно совпадает с меньшим значением, указанным на корпусе двигателя, то применяется соединение треугольником. При более высоком значении используется схема «звезда».

Далее выполняется подключение частотного преобразователя к контроллеру и пульту управления, который входит в комплект поставки. Все соединения осуществляются в соответствии со схемой, приведенной в руководстве по эксплуатации. Рукоятка должна находиться в нейтральном положении, после чего включается автомат. Нормальное включение подтверждается световым индикатором, загорающимся на пульте. Для того чтобы преобразователь заработал, нажимается кнопка RUN, запрограммированная по умолчанию.
После незначительного поворота рукоятки, двигатель начинает постепенно вращаться. Для переключения вращения в обратную сторону, существует специальная кнопка реверса. Затем с помощью рукоятки настраивается нужная частота вращения. На некоторых пультах вместо частоты вращения электродвигателя, отображаются данные о частоте напряжения. Поэтому рекомендуется заранее внимательно изучить интерфейс установленной аппаратуры.
Благодаря частотным преобразователям, работа современных асинхронных двигателей отличается высокой эффективностью, устойчивостью и безопасностью. Это особенно важно, поскольку каждый электродвигатель отличается индивидуальными особенностями режима работы. Поэтому оптимизации параметров питания агрегатов с использованием преобразователей частоты придается большое значение. Когда частотный преобразователь выбирается для каких-либо конкретных целей, в этом случае должны обязательно учитываться его рабочие параметры.

Нормальная работа устройства будет зависеть от типа электродвигателя, его мощности, диапазона, скорости и точности регулировок, а также от поддержания стабильного момента вращения вала. Эти показатели имеют первостепенное значение и должны органично сочетаться с габаритами и формой аппарата. Следует обратить особое внимание на то, как расположены элементы управления и будет ли удобно им пользоваться.
Выбирая устройство, необходимо заранее знать, в каких условиях оно будет эксплуатироваться. Если сеть однофазная, то и преобразователь должен быть таким же. То же самое касается и трехфазных аппаратов. Многое зависит от мощности асинхронных двигателей. Если при запуске на валу необходим высокий пусковой момент, то и частотный преобразователь должен быть рассчитан на большее значение тока.
electric-220.ru
Принцип действия основан на использовании вращающегося магнитного поля, создаваемого обмоткой статора.
 В зависимости от количества обмоток статора асинхронные двигатели бывают:
В зависимости от количества обмоток статора асинхронные двигатели бывают:
Частота вращения поля статора nст зависит от полюсности двигателя (Р), и частоты тока f, т.е у однополюсного двигателя:
nст=60f/P=> т.е. nст = 60*50/2=3000 об\мин.
У двухполюстного nст =60*50/2=1500 об\мин.
У трехполюстного nст = 60*50/3=1000 об\мин.
Вращающееся поле статора пересекает обмотку ротора, обычно короткозамкнутую, возникает явление электромагнитной индукции. В роторе индуцируется ЭДС и вихревые токи, которые взаимодействуют с полем статора и образуют выталкивающие силы и вращающий момент. Ротор начинает, крутится, догоняя поле статора.
Необходимым условием работы асинхронного двигателя является разница частот вращения ротора и поля статора.
nр≠nст и nр < nст
Важнейший параметр работы асинхронного двигателя, характеризующий отставание ротора от поля статора называется – скольжением (S)
S= (nст -np)/ nст *100%
В номинальном режиме S=5%, то есть у однополюсного двигателя np=2800-2880 об/мин,
у двухполюсного - np=1400-1440 об/мин,
у трехполюсного - np=960 об/мин
При увеличении нагрузки на асинхронный двигатель частота вращения ротора падает, а скольжение растет, при этом растет и вращающий момент (тяга), но нельзя допускать роста скольжения более Sкрит=10-20% т.к. вращающий момент резко падает, ротор останавливается и горит обмотка статора.
Асинхронные двигатели, работающие с начальной нагрузкой (тяговые, крановые, лифтовые) имеют фазный ротор, который в момент пуска (4-6 секунд) получает дополнительное питание через 3 контактных кольца.
Преимущество асинхронных двигателей:
Недостатки:
1.частотная регулировка скорости, что требует дополнительного электронного (тиристорного) оборудования.
2.более низкий КПД и перегрузка питающей цепи.
Р=U*I*cosφ (cosφ=0.7)
VI Раздел
poznayka.org
Режимы работы асинхронных двигателей. Холостой ход. Если пренебречь трением и магнитными потерями в стали (идеализированная машина), то ротор асинхронного двигателя при холостом ходе вращался бы с синхронной частотой n=n1 в ту же сторону, что и поле статора; следовательно, скольжение было бы равно нулю. Однако в реальной машине частота вращения ротора n при холостом ходе никогда не может стать равной частоте вращения n1, так как в этом случае магнитное поле перестанет пересекать проводники обмотки ротора и в них не возникнет электрический ток. Поэтому двигатель в этом режиме не может развить вращающего момента и ротор его под влиянием противодействующего момента сил трения начнет замедляться. Замедление ротора будет происходить до тех пор, пока вращающий момент, возникший при уменьшенной частоте вращения, не станет равным моменту, создаваемому силами трения. Обычно при холостом ходе двигатель работает со скольжением s = 0,2-0,5 %.
При холостом ходе в асинхронном двигателе имеют место те же электромагнитные процессы, что и в трансформаторе (обмотка статора аналогична первичной обмотке трансформатора, а обмотка ротора—вторичной обмотке). По обмотке статора проходит ток холостого хода I0, однако его значение в асинхронном двигателе из-за наличия воздушного зазора между ротором и статором значительно больше, чем в трансформаторе (20—40 % номинального тока по сравнению с 3—10 % у трансформатора). Для уменьшения тока I0 в асинхронных двигателях стремятся выполнить минимально возможные по соображениям конструкции и технологии зазоры. Например, у двигателя мощностью 5 кВт зазор между статором и ротором обычно равен 0,2—0,3 мм. Ток холостого хода, так же как и в трансформаторе, имеет реактивную и активную составляющие. Реактивная составляющая тока холостого хода (намагничивающий ток) обеспечивает создание в двигателе требуемого магнитного потока, а активная составляющая — передачу в обмотку статора из сети энергии, необходимой для компенсации потерь мощности в машине в этом режиме.
Нагрузочный режим. Чем больше нагрузочный момент на валу, тем больше скольжение и тем меньше частота вращения ротора. Увеличение скольжения при возрастании момента объясняется
 Рис. 260. Энергетическая диаграмма асинхронного двигателя
Рис. 260. Энергетическая диаграмма асинхронного двигателя
следующим образом. При увеличении нагрузки на валу ротора он начинает тормозиться и частота его вращения т уменьшается. Но одновременно увеличивается частота n1- n персечения вращающимся полем проводников обмотки ротора, а следовательно, э. д. с. Е2, индуцированная в этой обмотке, ток в роторе I2 и образованный им электромагнитный вращающий момент М. Этот процесс будет продолжаться до тех пор, пока электромагнитный момент двигателя M не сравняется с нагрузочным моментом Мвн. При достижении равенства моментов М = Мвн торможение прекратится и двигатель будет снова вращаться с постоянной частотой вращения, но меньшей, чем до увеличения нагрузки. При уменьшении нагрузочного момента Мвн частота вращения ротора по той же причине будет увеличиваться. Обычно при номинальной нагрузке скольжение для двигателей средней и большой мощности составляет 2—4 %, а для двигателей малой мощности от 5 до 7,5 %.
При работе двигателя под нагрузкой по обмоткам его статора и ротора проходят токи i1 и i2. Частота тока в обмотках статора f1 и ротора f2 определяется частотой пересечения вращающимся магнитным полем проводников соответствующей обмотки. Обмотка статора пересекается магнитным полем с частотой n1, а обмотка вращающегося ротора — с частотой n1 — n. Следовательно,
f2/f1 = (n1- n)/n1= s или f2 = f1s (83)
Передача электрической энергии из статора в ротор происходит так же, как и в трансформаторе. Двигатель потребляет из сети электрическую мощность Pэл = 3U1I1cos?1 и отдает приводимому им во вращение механизму механическую мощность Рмх (рис. 260). В процессе преобразования энергии в машине имеют место потери мощности: электрические в обмотках статора ?Рэл1 и ротора ?Рэл2, магнитные ?Рм от гистерезиса и вихревых токов в ферромагнитных частях машины и механические ?Рмх от трения в подшипниках и вращающихся частей о воздух. Из статора в ротор вращающимся электромагнитным полем передается электромагнитная мощность Pэм роторе она превращается в механическую мощность ротора Р’мх. Полезная механическая мощность на валу двигателя Pмх меньше мощности Р’мх на значение потерь мощности на трение ?Рмх.
При возрастании механической нагрузки на валу двигателя увеличивается ток I2. В соответствии с этим возрастает и ток I1 в обмотке статора.Электромагнитный момент М создается в асинхронном двигателе в результате взаимодействия вращающегося магнитного поля с током I2, индуцируемым им в проводниках обмотки статора. Однако в создании его участвует не весь ток I2, а только его активная составляющая I2cos?2 (здесь ?2 — угол сдвига фаз между током I2 и э. д. с. Е2 в обмотке ротора). Поэтому
M = cмФтI2 cos?2 (84)
где
Фт — амплитуда магнитного потока, созданного обмоткой статора;
cм — постоянная, определяемая конструктивными параметрами данной машины и не зависящая от режима ее работы.
Поясним физический смысл формулы (84). На рис. 261 изображен ротор двухполюсного асинхронного двигателя в развернутом виде, на котором кружками показаны поперечные сечения проводников. Крестики и точки внутри проводников обозначают направление в них тока i2, а под проводниками — направление индуцированных э. д. с. e2, которые пропорциональны индукции В в данной точке воздушного зазора между статором и ротором. Кривая В показывает распределение вдоль окружности ротора индукции, создаваемой вращающимся магнитным полем, кривая i2 — распределение тока в проводниках, а кривая f — распределение электромагнитных сил, возникающих в результате взаимодействия тока (а с вращающимся магнитным полем. Электромагнитный вращающий момент М, создаваемый в результате совместного действия всех сил f, будет пропорционален среднему значению электромагнитной силы fср. Легко заметить, что к проводникам, лежащим на дуге, равной 180° — ?2, приложены силы f, увлекающие ротор за вращающимся магнитным полем, а на дуге ?2 — тормозящие силы. Поэтому при неизменном токе I2 среднее значение электромагнитной силы fср, а следовательно, и электромагнитный момент М будут тем больше, чем меньше угол ?2. Электромагнитный момент М зависит от скольжения s.
 Рис. 261. Распределение индукции В, тока i2 и электромагнитных сил f, действующих на проводники асинхронного двигателя
Рис. 261. Распределение индукции В, тока i2 и электромагнитных сил f, действующих на проводники асинхронного двигателя
Так, при увеличении скольжения возрастает э. д. с. Е2 в обмотке ротора и ток I2. Однако одновременно уменьшается cos?2, так как активное сопротивление обмотки ротора R2 остается неизменным, а реактивное Х2 увеличивается (возрастает частота тока f2 в обмотке ротора).
При s < 10-20% увеличение скольжения приводит к незначительному уменьшению cos ?2, вследствие чего активная составляющая тока в обмотке ротора I2cos ?2 и электромагнитный момент М возрастают.
При некотором критическом скольжении sкр двигатель развивает наибольший момент Мmax, который определяет его перегрузочную способность. При дальнейшем увеличении скольжения (большем sкр) происходит резкое уменьшение cos ?2, поэтому активная составляющая тока I2cos ?2 и электромагнитный момент М уменьшаются.
Номинальный вращающий момент Мном двигатели средней и большой мощности развивают при скольжении Sном = 2-4%.
Согласно государственным стандартам на асинхронные двигатели отношение Mmax/Mном = 1,8-2,5. Критическое скольжение sкр для мощных двигателей составляет 5—10%, для двигателей средней и малой мощности — от 10 до 20 %.
Асинхронный двигатель, как и любая электрическая машина, может работать в генераторном режиме, создавая тормозной момент. Этот режим используется для электрического торможения приводов.
Режим пуска. В начальный момент пуска ротор двигателя неподвижен: скольжение s=1, магнитное поле пересекает ротор с максимальной частотой, индуцируя в нем наибольшую э. д. с. Е2. Так как ток в роторе I2 определяется значением э. д. с. Е2, то в начальный момент пуска он будет наибольшим. Наибольшим будет и ток в статоре. Обычно пусковой ток двигателя в 5—7 раз больше номинального. Вращающий момент Мп при пуске называется пусковым. Он обычно меньше наибольшего момента, который может развить двигатель. Для двигателей различных типов и мощностей отношение Мп/Мном = 0,7 – 1,8.
electrono.ru
Наиболее простым, дешевым и надежным электрическим двигателем является асинхронный короткозамкнутый двигатель, поэтому его использование в регулируемом электроприводе представляет особый интерес. Как было установлено, возможности регулирования, аналогичные возможностям изменения напряжения на якоре двигателя постоянного тока с независимым возбуждением, в асинхронном электроприводе обеспечиваются путем изменения частоты напряжения и тока статорной обмотки. Для реализации этих возможностей необходимо осуществлять питание статорной обмотки двигателя от управляемого преобразователя частоты.
Регулирование частоты представляет собой технически более сложную задачу, чем регулирование выпрямленного напряжения, так как, как правило, требует дополнительных ступеней преобразования энергии.
Наибольшее число ступеней преобразования характерно для электромашинных преобразователей частоты. Для регулирования частоты вырабатываемого синхронным генератором напряжения необходимо регулировать его скорость. Для этой цели привод генератора необходимо осуществлять либо по системе Г-Д, либо по системе ТП-Д. Электромашинный преобразователь частоты содержит соответственно два преобразовательных агрегата: асинхронный двигатель, вращающий генератор постоянного тока, и двигатель постоянного тока, вращающий синхронный генератор с регулируемой скоростью. Электропривод с таким преобразователем частоты имеет пять ступеней преобразования энергии, увеличенные примерно в 5 раз массу, габариты и стоимость (по сравнению с нерегулируемым электроприводом), ухудшенный КПД, и его использование экономически нецелесообразно.
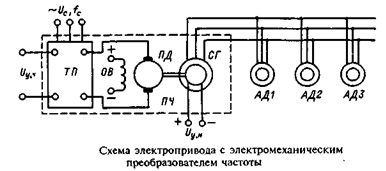
На рисунке приведена схема вентильно-электромашинного преобразователя частоты, в котором регулирование скорости синхронного генератора производится по системе ТП-Д. Здесь вместо электромашинного агрегата, вырабатывающего регулируемое напряжение постоянного тока, применен более экономичный тиристорный преобразователь. Однако и в этом случае преобразователь частоты содержит три ступени преобразования энергии, из них две - электромеханического преобразования. Схема непосредственного регулирования скорости по системе ТП-Д проще и дешевле, поэтому применение системы ПЧ-АД, показанной на рисунке, может иметь место только в специальных установках, например в случаях, когда двигатель постоянного тока не может быть применен для привода исполнительного механизма по техническим условиям.
В данной схеме присутствуют два канала управления: канал управления частотой (Uyч), воздействующий на скорость синхронного генератора СГ, и канал управления напряжением, воздействующий на возбуждение СГ(Uун).
Канал регулирования частоты имеет структуру системы ТП-Д (см. рис.) и обладает значительной инерционностью, обусловленной механической инерцией преобразовательного агрегата ПД-СГ. Канал регулирования напряжения также инерционен в связи с наличием электромагнитной инерции цепи возбуждения синхронного генератора. Поэтому как объект управления представленная на рисунке система обладает неблагоприятными свойствами.
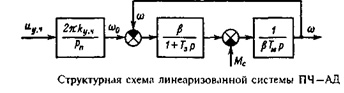
Наименьшим числом ступеней преобразования энергии обладают вентильные преобразователи частоты Они содержат ступень преобразования переменного тока в постоянный и ступень инвертирования. Эти две ступени в самостоятельном виде присутствуют в преобразователях частоты со звеном постоянного тока В преобразователе частоты с непосредственной связью функции выпрямления и инвертирования совмещены в реверсивном преобразователе постоянного тока, выпрямленное напряжение или ток которого изменяются с требуемой частотой с помощью системы управления преобразователем. Как следствие, наиболее близкими к системе ТП-Д массогабаритными показателями обладает система ПЧ-АД с преобразователем с непосредственной связью, а система с преобразователями, содержащими ступень постоянного тока, уступает по этим показателям системе ТП-Д. Однако различия по мере совершенствования вентильных преобразователей частоты постепенно сокращаются, и существенные преимущества асинхронного двигателя определяют несомненную перспективность системы ПЧ-АД.
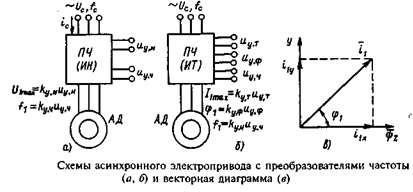
Известно, что вентильные преобразователи частоты могут обладать либо свойствами источника напряжения, либо свойствами источника тока. В первом случае наряду со входом управления частотой Uy.ч преобразователь имеет вход управления напряжением Uун (рис. a). В случае инвертора тока регулирование магнитного потока машины при регулировании частоты осуществляется по входу управления током Uут (рис. б).
Канал управления частотой может осуществлять либо дискретное, либо непрерывное формирование частоты напряжения и тока. При непрерывном формировании синусоидальных напряжений или токов заданной частоты его можно считать практически безынерционным. Канал управления напряжением или током воздействует на тиристорный преобразователь, и его быстродействие может оцениваться быстродействием этого управляемого преобразователя.
www.teh-lib.ru
 Принцип действия основан на использовании явления вращающегося магнитного поля, создаваемого обмотками статора.
Принцип действия основан на использовании явления вращающегося магнитного поля, создаваемого обмотками статора.
Примечание: для упрощения понимания создания вращающегося магнитного поля следует вспомнить об обратимости электрических и электромагнитных явлений. Так, например, для получения 3-х фазного переменного напряжения при помощи 3-х фазного генератора необходимо было вращать ротор с его магнитным полем. Но если, наоборот, подать 3-х фазное напряжения на статорные обмотки, то они создают вращающееся магнитное поле. Причем, за один период изменения тока в любой статорной обмотке магнитное поле повернётся на 360 градусов, т.е. на 1 оборот.
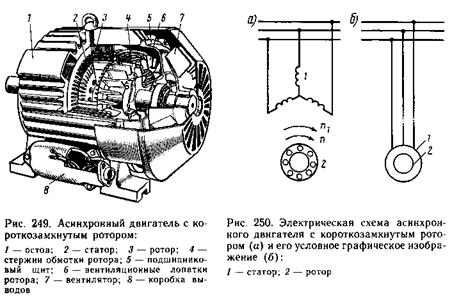
Простейший асинхронный двигатель состоит из статора и ротора. В пазах сердечника статора укладывают 3 обмотки, смещенные относительно друг друга на 120 градусов. Концы обмоток выводятся в клемную коробку двигателя, где они соединяются между собой или по схеме «звезда» или «треугольник».
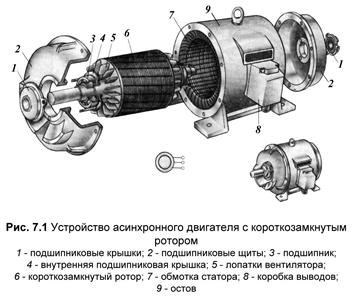 Ротор представляет собой вал с шихтованным сердечником и в пазы сердечника, без изоляции, укладывают обмотку типа «беличьей клетки». Такой ротор называют короткозамкнутым. В маломощных машинах обмотку ротора выполняют заливкой алюминиевого сплава в пазы ротора. При этом отливку выполняют за одно целое с короткозамыкающими кольцами и лопатками вентилятора.
Ротор представляет собой вал с шихтованным сердечником и в пазы сердечника, без изоляции, укладывают обмотку типа «беличьей клетки». Такой ротор называют короткозамкнутым. В маломощных машинах обмотку ротора выполняют заливкой алюминиевого сплава в пазы ротора. При этом отливку выполняют за одно целое с короткозамыкающими кольцами и лопатками вентилятора.
Принцип действия:
При подаче 3-х фазного напряжения на статорные обмотки двигателя они создают вращающееся магнитное поле. Данное магнитное поле пересекает проводники ротора и в них индуктируется ЭДС. Так как проводники ротора замкнуты между собой, то под действием ЭДС по ним потечет ток. На проводники с током ротора, находящимся в магнитном поле статора, будут действовать выталкивающие силы. Эти выталкивающие силы и создают вращающий момент на валу ротора, под действием которого ротор вращается в ту же сторону, куда вращается магнитное поле статора.
Частота вращения магнитного поля статора обозначается – n1,и определяется по формуле:
n1= 60f/P
где: f – частота питающего тока
P –число пар полюсов
60 –коэффициент перевода единиц измерения из об/сек в об/мин
На локомотивах применяют асинхронные двигатели с разным количеством обмоток. Причем, количество обмоток всегда кратно 3. Таким образом, двигатели могут иметь 3 обмотки, 6 обмоток, 9 обмоток и т.д. Каждые 3 обмотки у асинхронного двигателя приравнивается к одной паре полюсов. Соответственно, при увеличении количества статорных обмоток частота вращения магнитного поля уменьшается.
Данные о величине частоты вращения разнополюсных машин при питании током промышленной частоты (f=50Гц) приведены в таблице:
| Количество статорных обмоток | Количество пар полюсов (Р) | Подсчет n1 по формуле | Значение n1 ( об/мин) | Примечание |
| 60×50/1 | 3 обмотки по кругу занимают пространство 3600, поэтому за один период изменения тока магнитное поле повернется на3600. | |||
| 60×50/2 | 3 обмотки из 6 по кругу занимают пространство 1800, поэтому за один период изменения тока магнитное поле повернется на1800. | |||
| 60×50/3 | 3 обмотки из 9 по кругу занимают пространство 1200, поэтому за один период изменения тока магнитное поле повернется на1200. |
Частота вращения ротора обозначается – n2
Для того, чтобы на валу ротора создавался вращающий момент, необходимо выполнение данного условия:
n2‹ n1
Поэтому такие двигатели называются асинхронными. Приставка «а» означает «не», то есть несинхронные двигатели.
Отставание ротора от магнитного поля статора характеризуется скольжением (S). Скольжение определяется по данной формуле:
S= (n1 –n2)/ n1 ×100%
Скольжение показывает, на сколько процентов частота вращения ротора меньше частоты вращения магнитного поля статорных обмоток. Значение n2 при определенном скольжении для различных асинхронных двигателей приведены в таблице:
| Количество статорных обмоток | Количество пар полюсов (Р) | n1 (об/мин) | S (%) | S (об/мин) | n2 (об/мин) |
 Механическая характеристика и свойства асинхронных двигателей.
Механическая характеристика и свойства асинхронных двигателей.
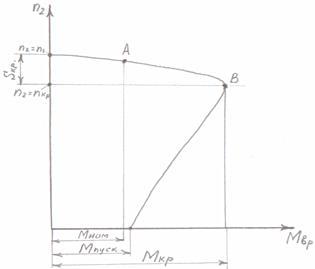
Механическая характеристика – представляет собой графическую зависимость частоты вращения ротора (n2) от величины вращающего момента (Мвр). При снятии данной характеристики вращающий момент изменяют за счет изменения механической нагрузки на валу двигателя.
Данная характеристика показывает:
1. При Мвр=0, частота вращения ротора(n2) равна частоте вращения магнитного поля статорных обмоток (n1). Но в реальности, даже в режиме холостого хода, на вал двигателя будет действовать момент сопротивления (трение в подшипниках крепления вала, сопротивления от воздушной среды и т.д.). Поэтому, по принципу саморегулирования, на валу двигателя всегда будет создаваться вращающий момент, компенсирующий момент сопротивления. Следовательно, всегда будет выполняться условие n2‹ n1
2. Верхняя часть характеристики до точки В считается рабочей. По этой части характеристики видно, что при увеличении механической нагрузки на валу частота вращения ротора уменьшается незначительно. Соответственно, асинхронный двигатель обладает жесткой частотной характеристикой.
3. В точке В асинхронный двигатель развивает максимальный вращающий момент, который называется критическим моментом. Для большинства асинхронных двигателей такой момент возникает при величине скольжения Sкрит=10-20%.Если величина механической нагрузки будет больше Мкр, то происходит «опрокидование» двигателя, то есть вращающий момент резко уменьшается и ротор останавливается. Данный процесс показан нижней частью механической характеристики.
poznayka.org
Общие сведения. Технологический процесс часто требует изменения частоты вращения исполнительного механизма. С этой целью широко применяются коробки скоростей, которые усложняют кинематику провода, вызывают вибрацию системы и увеличивают инерционность привода. Для повышения точности обработки и увеличения производительности целесообразно использовать регулировочные свойства двигателей. В асинхронных двигателях частота вращения определяется из равенства

где n1 = 60f 1 / р.
Из этого равенства следует, что изменять п можно тремя способами: изменением частоты f1 , числа пар полюсов р и скольжения s. Частоту вращения ротора в принципе можно регулировать изменением напряжения питания U1. Однако с увеличением U1 появляется опасность превышения допустимой температуры нагрева двигателя, а с уменьшением U1 уменьшается перегрузочная способность двигателя.
Регулирование изменением частоты (частотное регулирование). Этим способом изменение частоты вращения ротора п осуществляется за счет изменения частоты питающего напряжения f1. Это возможно потому, что скольжение в номинальном режиме составляет всего 2—8 %.
Для изменения частоты f1 могут применяться машинные и полупроводниковые (тиристорные) преобразователи. На рис. 3.36 показана схема машинного преобразователя. Асинхронный двигатеь АД с постоянной частотой вращает генератор постоянного тока Г, работающий в системе генератор — двигатель. Генератор Г питает двигатель Д постоянного тока, частота вращения которого регулируется током возбуждения генератора Г и двигателя Д.
Двигатель вращает с различными частотами синхронный генератор СГ, частота выходного напряжения которого f1 = n1p/60 изменяется. В результате АД изменяет частоту вращения рабочего механизма. Этот способ позволяет плавно изменять частоту вращения АД. Недостатками способа являются высокая стоимость преобразователя, низкий КПД установки из-за многократного преобразования энергии, сравнительно небольшой диапазон регулирования.
Частотное тиристорное регулирование. Значительно больший эффект при частотном регулировании достигается применением тиристорных преобразователей. На рис. 3.37 показана схема такого регулирования. Тиристорный преобразователь ТП питается от трехфазной сети с постоянными значениями напряжения U1 и частоты f1.
На выходе преобразователя получается постоянное варьируемое напряжение U1c. Это напряжение подается на блок инвертора И, на выходе которого появляется регулируемое переменное напряжение U1v при частоте f1v. Напряжение U1v подается на асинхронный двигатель АД.
Для автоматизации процесса регулирования необходимо дополнительно иметь блок задания частоты БЗЧ и блоки управления напряжением УН и частотой УЧ.
Для поддержания точного значения скорости целесообразно иметь обратную связь по частоте с выхода АД на блок задания частоты. Регулирование изменением числа полюсов.
Регулирование изменением числа полюсов.
Асинхронный двигатель не имеет явно выраженных полюсов и поэтому его число полюсов зависит от схемы соединения катушек в обмотках каждой фазы статора.
Если, например, обмотка фазы состоит из двух катушек, то при их последовательном соединении число пар полюсов р = 2, а при параллельном соединении р = 1. Начала и концы катушек выводятся на клеммы щитка, так что переключение катушек можно делать на работающем двигателе. Можно разместить в пазах статора две независимые обмотки, каждая из которых создает разное число пар полюсов, например, р = 1 и р = 2.
Одна из обмоток может, например, соединяться в одинарную звезду, а другая – в двойную звезду (рис. 3.38, а и б). Можно также переключать треугольник в двойную звезду (рис. 3.39, а и б).
В результате двигатель будет трехскоростной. В принципе можно разместить на статоре две обмотки, каждая из которых имеет две скорости, такая машина будет четырехскоростной. Однако размещение нескольких обмоток увеличивает габариты и стоимость машины. Поэтому лучше применять одну обмотку с переключением на четыре скорости. При этом можно получить синхронные скорости 3000 / 1500 / 1000 / 500 или 1500 / 1000 / 750 / 500 об/мин или другие комбинации.
 Регулирование изменением числа полюсов является ступенчатым регулированием. Механические характеристики при разном числе пар полюсов показаны на рис. 3.40. Этот способ регулирования экономичен, рабочая часть характеристик жесткая, но данный способ применяется лишь в случаях, не требующих плавного регулирования, например в станках, где ступенчатое регулирование применяется с целью уменьшения числа ступеней в коробках скоростей, вентиляторах, насосах и др.
Регулирование изменением числа полюсов является ступенчатым регулированием. Механические характеристики при разном числе пар полюсов показаны на рис. 3.40. Этот способ регулирования экономичен, рабочая часть характеристик жесткая, но данный способ применяется лишь в случаях, не требующих плавного регулирования, например в станках, где ступенчатое регулирование применяется с целью уменьшения числа ступеней в коробках скоростей, вентиляторах, насосах и др.
Регулирование частоты вращения изменением подводимого напряжения. При уменьшении напряжения U момент двигателя уменьшается пропорционально U2. В связи с этим изменяются механические характеристики, уменьшается критический момент Mк , при постоянном моменте сопротивления увеличивается скольжение и уменьшается частота вращения ротора.
Уменьшать напряжение U можно включением в цепь статора реостатов (рис. 3.41, а), автотрансформаторов (рис. 3.41,6) или регулируемых дросселей (рис. 3.41, в). При включении реостатов в них теряется значительная мощность (RI2).
Автотрансформаторы дают возможность регулировать частоту вращения лишь вручную.
Регулируемые дроссели позволяют автоматизировать этот процесс, для чего их цепь
подмагничивания  включается в систему автоматического регулирования.
включается в систему автоматического регулирования.
Данный метод применяется только у двигателей малой мощности, так как при этом способе регулирования уменьшается КПД двигателя, уменьшается критический момент, а диапазон регулирования сравнительно небольшой.
Регулирование изменением сопротивления цепи ротора R2 (реостатное регулирование). Этот способ применим только для двигателей с фазным ротором. Такое регулирование связано с изменением скольжения s в соответствии с зависимостью п = п1 (1 — s).
Из формул ( 3.26) и ( 3.28) следует, что с увеличением R2 угол наклона механической характеристики увеличивается, а критический момент остается постоянным (Mк = const).
На рис. 3.42 представлено семейство характеристик п(М) при различных R2 . Если момент нагрузки Mc = const, то частота вращения n с увеличением R2 падает, а скольжение увеличивается.
Этот способ регулирования имеет ряд недостатков: дополнительные потери энергии в реостате, механические характеристики становятся мягкими, относительно малый диапазон регулирования.

electrono.ru









