





 Синхронные электродвигатели малой мощности (микродвигатели) употребляются в системах автоматики, разных бытовых устройствах, часах, фотоаппаратах и т. д.
Синхронные электродвигатели малой мощности (микродвигатели) употребляются в системах автоматики, разных бытовых устройствах, часах, фотоаппаратах и т. д.
Большая часть синхронных электродвигателей малой мощности отличается от машин обычного выполнения только конструкцией ротора, который, обычно, не имеет обмотки возбуждения, контактных колец и прижимающихся к ним щеток.
Для появления крутящего момента ротор делают из магнитно-твердого сплава с следующим однократным намагничиванием его в сильном импульсном магнитном поле, в итоге чего в предстоящем полюсы сохраняют остаточную намагниченность.
При использовании магнитномягкого материала ротору присваивают необыкновенную форму, обеспечивающую различное магнитное сопротивление его магнитопровода в круговых направлениях.
 Синхронные движки с неизменными магнитами имеют цилиндрический явнополюскый ротор из магнитно-твердого сплава и короткозамкнутую пусковую обмотку.
Синхронные движки с неизменными магнитами имеют цилиндрический явнополюскый ротор из магнитно-твердого сплава и короткозамкнутую пусковую обмотку.
В момент запуска синхронный движок работает как асинхронный и его исходный крутящий момент создается за счет взаимодействия вращающегося магнитного поля статора с наведенными им токами в короткозамкнутой обмотке ротора. Так как движок пускается в ход в возбужденном состоянии, то магнитное поле неизменных магнитов вращающегося ротора наводит в обмотке статора э. д. с. переменной частоты а это вызывает токи, из-за которых появляется тормозной момент.
Результирующий момент на валу мотора определяется суммой моментов, обусловленных короткозамкнутой обмоткой и тормозным эффектом, т. е. который находится в зависимости от скольжения. В процессе разгона ротора этот момент добивается малого значения которое при правильном выборе пусковой обмотки должно быть больше номинального момента.
Когда скорость приблизится к синхронной, ротор, в итоге взаимодействия поля неизменных магнитов с вращающимся магнитным полем статора втягивается в синхронизм и дальше крутится с синхронной скоростью.
Рабочие свойства синхронного мотора с неизменными магнитами не достаточно отличаются от подобных черт синхронного мотора с обмоткой возбуждения ротора.
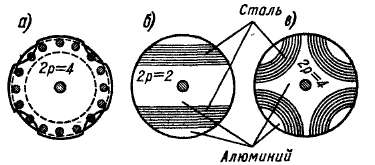
 Синхронные реактивные движки имеют явнополюсный ротор из магнитно-мягкого материала с впадинами, либо секционированный, по этому его магнитное сопротивление в круговых направлениях различно. Ротор со впадинами состоит из штампованных листов электротехнической стали и имеет короткозамкнутую пусковую обмотку. Встречаются роторы из сплошного ферромагнитного материала с подобными впадинами. Ротор секционированный состоит из листов электротехнической стали, залитых алюминием либо другим диамагнитным материалом, выполняющим роль коротко-замкнутой обмотки.
Синхронные реактивные движки имеют явнополюсный ротор из магнитно-мягкого материала с впадинами, либо секционированный, по этому его магнитное сопротивление в круговых направлениях различно. Ротор со впадинами состоит из штампованных листов электротехнической стали и имеет короткозамкнутую пусковую обмотку. Встречаются роторы из сплошного ферромагнитного материала с подобными впадинами. Ротор секционированный состоит из листов электротехнической стали, залитых алюминием либо другим диамагнитным материалом, выполняющим роль коротко-замкнутой обмотки.
При включении обмотки статора возбуждается крутящееся магнитное поле и происходит асинхронный запуск мотора. По окончании разгона ротора до подсинхронной скорости он под действием реактивного крутящего момента, обусловленного различием магнитных сопротивлений в круговых направлениях, заходит в синхронизм и размещается относительно вращающегося магнитного поля статора так, чтоб его магнитное сопротивление для этого поля было минимальным.
 Обычно синхронные реактивные движки изготовляют номинальной мощностью до 100 Вт, а время от времени и выше, если простоте конструкции и завышенной надежности присваивают особенное значение. При схожих габаритах номинальная мощность синхронных реактивных движков в 2 — 3 раза меньше номинальной мощности синхронных движков с неизменными магнитами, но по конструкции они проще, отличаются наименьшей ценой, номинальный коэффициент мощности их не превосходит 0,5, а номинальный к. п. д. составляет до 0,35 — 0,40.
Обычно синхронные реактивные движки изготовляют номинальной мощностью до 100 Вт, а время от времени и выше, если простоте конструкции и завышенной надежности присваивают особенное значение. При схожих габаритах номинальная мощность синхронных реактивных движков в 2 — 3 раза меньше номинальной мощности синхронных движков с неизменными магнитами, но по конструкции они проще, отличаются наименьшей ценой, номинальный коэффициент мощности их не превосходит 0,5, а номинальный к. п. д. составляет до 0,35 — 0,40.
Синхронные гистерезисные движки имеют ротор из магнитотвердого сплава с широкой петлей гистерезиса. С целью экономии этого дорогостоящего материала ротор делают сборной конструкции, при которой вал крепится на втулке из ферро- либо диамагнитного материала, а на ней крепят сплошной либо собранный из пластинок полый цилиндр, затянутый запорным кольцом. Внедрение магнитно-твердого сплава для производства ротора приводит к тому, что в работающем движке волны рассредотачивания магнитной индукции по поверхностям статора и ротора сдвинуты друг относительно друга на некий угол, именуемый углом гистерезиса, что обусловливает появление гистерезисного крутящего момента, направленного в сторону вращения ротора.
Различие меж синхронными движками с неизменными магнитами и синхронными гистерезисными движками заключается в том, что у первых ротор при изготовлении машин подвергается подготовительному намагничиванию в сильном импульсном магнитном поле, а у вторых он намагничивается вращающимся магнитным полем статора.
При пуске синхронного гистерезисного мотора кроме основного гистерезисного крутящего момента в машинах со сплошным ротором появляется еще асинхронный крутящий момент, обусловленный вихревыми токами в магнитопроводе ротора, что содействует разгону ротора, вхождению его в синхронизм и последующую работу с синхронной скоростью при неизменном сдвиге ротора относительно вращающегося магнитного поля статора на угол, определяемый нагрузкой на валу машины.
Синхронные гистерезисные движки эксплуатируют как в синхронном режиме, так и в асинхронном, но в последнем случае при малом скольжении. Синхронные гистерезисные движки отличаются огромным исходным пусковым моментом, плавностью входа в синхронизм, малозначительным конфигурацией тока в границах 20 — 30 % при переходе от холостого хода к режиму недлинного замыкания.
Эти движки имеют наилучшие характеристики, чем синхронные реактивные, отличаются простотой конструкции, надежностью и бесшумностью в работе, малыми габаритами и малозначительной массой.
Отсутствие короткозамкнутой обмотки приводит к качаниям ротора при переменной нагрузке, что обусловливает определенную неравномерность его вращения, ограничивающую область внедрения машин, которые изготовляют номинальной мощностью до 400 Вт на промышленную и завышенные частоты как одно-, так и двухскоростные.
Номинальный коэффициент мощности синхронных гистерезисных движков не превосходит 0,5, а номинальный к. п. д. добивается значения 0,65.
 Синхронные реактивно-гистерезисные движки имеют явнополюсный статор с обмоткой, расположенной на магнитопроводе, собранном из 2-ух симметричных пакетов листов электротехнической стали со стыком снутри каркаса обмотки. Магнитопровод имеет два полюса, разрезанных продольным пазом на равные части, при этом на какой-то из них на каждом полюсе находятся короткозамкнутые витки. Меж этими расщепленными полюсами находится ротор, составленный из нескольких тонких колец с перемычками из закаленной магнитно-твердой стали, насаженных на валик, соединенный с редуктором, снижающим частоту вращения выходного вала до нескольких сотых толикой либо нескольких 10-ов об/мин.
Синхронные реактивно-гистерезисные движки имеют явнополюсный статор с обмоткой, расположенной на магнитопроводе, собранном из 2-ух симметричных пакетов листов электротехнической стали со стыком снутри каркаса обмотки. Магнитопровод имеет два полюса, разрезанных продольным пазом на равные части, при этом на какой-то из них на каждом полюсе находятся короткозамкнутые витки. Меж этими расщепленными полюсами находится ротор, составленный из нескольких тонких колец с перемычками из закаленной магнитно-твердой стали, насаженных на валик, соединенный с редуктором, снижающим частоту вращения выходного вала до нескольких сотых толикой либо нескольких 10-ов об/мин.
При включении обмотки статора, благодаря короткозамкнутым виткам, создается сдвиг по фазе во времени меж магнитными потоками неэкранированной и экранированной частей полюсов, что приводит к возбуждению результирующего вращающегося магнитного поля. Это поле, взаимодействуя с ротором, содействует появлению асинхронного и гистерезисного крутящих моментов, вызывающих разгон ротора, который по достижении подсинхронной скорости под воздействием реактивного и гистерезисного крутящих моментов заходит в синхронизм и крутится в направлении, от неэкранированной части полюса к его экранированной части, где размещены короткозамкнутые витки.
У реверсивных движков заместо короткозамкнутых витков используют четыре катушки, которые располагают на обеих частях каждого расщепленного полюса, и для принятого направления вращения ротора замыкают подобающую пару катушек накоротко.
Синхронные реактивно-гистерезисные движки имеют относительно огромные габариты и массу, номинальная мощность их не превосходит 12 мкВт, работают они при очень низком коэффициенте мощности, а номинальный к. п. д. их не превосходит 0,01.

Синхронные шаговые движки конвертируют управляющие электронные импульсы в данный угол поворота, осуществляемый дискретным методом. Они имеют статор, на магнитопроводе которого находятся две либо три однообразные пространственно сдвинутые обмотки, попеременно присоединяемые к источнику электронной энергии в виде прямоугольных импульсов регулируемой частоты. Под воздействием импульсов тока полюсы статора соответственно намагничиваются с переменной полярностью. Изменение направления токов в обмотках статора приводит к соответственному перемагничиванию полюсов и установлению новейшей обратной полярности.
Явнополюсный ротор шаговых движков может быть активным и реактивным. Активный ротор имеет обмотку возбуждения неизменного тока, контактные кольца и щетки либо систему неизменных магнитов с чередующейся полярностью, а реактивный ротор делают без обмотки возбуждения.
Число полюсов ротора шагового мотора вдвое меньше числа полюсов статора. Каждое переключение обмоток статора приводит к повороту результирующего магнитного поля машины и вызывает синхронное перемещение ротора на один шаг. Направление поворота ротора находится в зависимости от полярности импульса, поданного на подобающую обмотку статора.
elektrica.info
Cтраница 1
Асинхронные двигатели малой мощности и микродвигатели также выполняют с короткозамкнутым ротором. [1]
Асинхронные двигатели малой мощности часто используются для работы при питании как от трехфазной, так и однофазной сети. Асинхронные универсальные двигатели серии УАД имеют трехфазную обмотку с шестью выводами. Они обеспечивают круговое вращающееся магнитное поле ( при правильном выборе емкости конденсатора) при нагрузке, близкой к номинальной. За номинальную мощность однофазного двигателя принимается мощность, равная 70 - 75 % номинальной мощности трехфазного двигателя. [3]
Асинхронные двигатели малой мощности с короткозамкнутыми роторами широко применяются в качестве двигателей общего назначения: для привода станков, центрифуг, насосов, конторских машин, звукозаписывающих аппаратов, машин для стрижки овец и дойки коров, холодильных, посудомоечных и стиральных машин, киноаппаратуры, вентиляторов, медицинского оборудования и др., а также в качестве вспомогательных - силовые двигатели в автоматических устройствах. [4]
Асинхронные двигатели малой мощности общего применения используются для электропривода постоянной скорости вращения, в котором требования по поддержанию скорости сравнительно невелики. В зависимости от вида питающего напряжения и обмотки статора различают трехфазные, двухфазные и однофазные асинхронные двигатели. [5]
Асинхронные двигатели малой мощности общего применения используются для электропривода постоянной скорости, в котором требования по поддержанию величины скорости сравнительно невелики. В зависимости от вида питающего напряжения и обмотки статора различают трехфазные и однофазные асинхронные двигатели. [6]
Расчет асинхронного двигателя малой мощности с асимметричным статором рекомендуется проводить методом комплексных магнитных сопротивлений, так как эквивалентная магнитная цепь подобного двигателя ( рис. 5) проще эквивалентной электрической цепи. [8]
У асинхронных двигателей малой мощности величина Н мала и составляет примерно 0 1 сек или 5 периодов, а часто даже меньше. [9]
Для асинхронных двигателей малых мощностей исполнен. IPOO Т - ъ 15 - т - ЗО мин; для двигателей исполнения IP34 Ts 2 - - 5 ч в зависимости от мощности. [10]
Для асинхронных двигателей малых мощностей открытого типа 7 н 15 - 30 мин; для двигателей закрытого типа 7н 2 - ь5 ч в зависимости от мощности. [11]
Для асинхронных двигателей малых мощностей открытого типа Тя 15 - f - 30 мин; для двигателей закрытого типа Ти 2 - г 5 ч в зависимости от мощности. [12]
Для асинхронных двигателей малых мощностей открытого типа Тн - 15 - 30 мин; для двигателей закрытого типа Гн 2 - 5 ч в зависимости от мощности. [13]
Для асинхронных двигателей малых мощностей открытого типа Тн 15 - 30 мин; для двигателей закрытого типа Тн - 2 - 5 ч в зависимости от мощности. [14]
В асинхронных двигателях малой мощности ударные значения пусковых моментов и токов практически не зависят от момента сопротивления. С увеличением момента нагрузки возрастает лишь время пуска двигателя. Относительные значения ударных моментов и токов в микродвигателях значительно меньше, чем в машинах большой мощности, за счет большего активного сопротивления обмотки статора. Ударный момент определяется токами переходного режима и вследствие этого отличается от начального пускового момента, найденного из режима короткого замыкания двигателя. [15]
Страницы: 1 2 3 4
www.ngpedia.ru
Для некоторых механизмов необходимы двигатели малой мощности с постоянной скоростью вращения (лентопротяжные механизмы киноаппаратов, электрические часы, аппараты и т. д ). В качестве таких двигателей применяются синхронные двигатели без обмоток возбуждения. Отсутствие обмоток возбуждения упрощает конструкцию двигателей и их эксплуатацию, а также повышает надежность их работы. Во многих случаях такие двигатели являются однофазными.
Устройство статора многофазных маломощных синхронных двигателей, рассматриваемых в настоящем параграфе, ничем не отличается от устройства статора нормальных синхронных и асинхронных машин, а статоры однофазных синхронных двигателей имеют такое же устройство, как и статоры однофазных асинхронных двигателей (с рабочей и пусковой обмоткой, конденсаторные, с экранированными полюсами на статоре — см. § 30-2), и пуск однофазных синхронных и асинхронных двигателей производится одинаково (в конце пуска, синхронные двигатели втягиваются в синхронизм под действием синхронного* электромагнитного момента). Поэтому ниже рассматриваются особенности роторов синхронных двигателей без обмотки возбуждения.
Сняхронные двигатели с постоянными магнитами имеют обычно цилиндриче-* екие роторы из магнитно-твердых сплавов (алии, алнико и др.) и, кроме того» пусковую обмотку в виде беличьей клетки. Ротор из магнитно-твердого сплава изготовляется путем литья и трудно поддается механической обработке. Поэтом^ выполнение в нем литой беличьей клетки невозможно. В связи с этим ротор изго* товляется обычно составным — обычный ротор короткозамкнугого асинхронного^ двигателя посредине и дваг диска из магнитно-твердого сплава по краям. Исполц зование материалов таких двигателей получается малым, и поэтому они обычнее строятся мощностью до 30—40 вт. Генераторы с постоянными магнитами не. нуждаются в пусковой обмотке и строятся на мощность Р„= 5-«- 10 кв-а, 4-в ряде случаев до РИ= 100 кв-а. Однако ввиду дороговизны магнитно-тверды* сплавы применяются в специальных случаях, когда требуется повышенная яа' дежность в работе.
Реактивные синхронные двигатели. Явнополюсные синхронные машины без обмотки возбуждения называются реактивными. Особенности работы таких машвя, уже были рассмотрены в § 35-3.
Различные конструкции роторов синхронных реактивных двигателей изображены на рис. 41-5. Ротор, показанный на рис. 41-5, а, имеет наибольшее распространение, изготовляется из листовой электротехнической стали и снабжается пусковой обмоткой в виде беличьей клетки. Его полюсы имеют форму выступов!» Роторы, изображенные на рис. 41-5, б и в, изготовляются путем заливки сталь-* ных пакетов алюминием, причем алюминий выполняет роль'пусковой обмотки.
Реактивные двигатели имеют низкий coscp и поэтому также низкий к. п. д< (при Ря= 20 -ь 40 вт к. п. д. %= 0,3 -з- 0,4), а их вес обычно больше вееф асинхронных двигателей такой же мощности. У однофазных конденсаторный реактивных синхронных двигателей cosq> улучшается за счет конденсаторов.
Реактивные двигатели обычно строятся на мощности до 50—100 вт, нЩ когда большое значение имеет простая конструкция и повышенная надежности они строятся также и на значительно большие мощности.
Синхронные гистерезисные двигатели. Низкие энергетические и неблаго* приятные весовые показатели синхронных реактивных двигателей явились сти*
мулом для разработки и применения гистерезисных двигателей Роторы таких двигателей изготовляются из специальных магнитно-твердых сплавов, имеющих широкую петлю гистерезиса (например, сплав викаллой). При массивной конструкции ротора эти двигатели при пуске развивают также асинхронный вра-
Рис 41-5. Конструкция роторов синхронных реактивных двигателей
щающий момент. Однако этот момент значительно меньше гистерезисного момента (см. § 25-4), вследствие чего пуск, а также втягивание в синхронизм и работа происходят за счет гистерезисного момента вращения.
Разница между двигателями с постоянными магнитами и гистерезисными состоит в том, что у первых ротор подвергается специальному предварительному намагничиванию, а у вторых ротор намагничивается полем статора двигателя.
Гистерезисные двигатели имеют лучшие показатели, чем реактивные, и строятся на мощности до 300—400 em.
Реактивно-гистерезисный синхронный двигатель(рис. 41-6) с редуктором был предложен в 1916 г. Уорреном и широко применяется до настоящего времени для привода электрических часов, для протягивания ленты в самопишущих приборах и т.% Статор этого двигателя имеет экранированные П0люсы(ем. также § 30-2), а ротор состоит из шести-семи пластин толщиной 0,4 мм из закаленной маг-

Рис. 41-6. Реактивно-гистерезисный двигатель
/ — магнитопровод статора; 2 — каркас;
3 — катушка возбуждения; 4 — короткозамк-
нутые витки; 5 — ротор
нитно-твердой стали. Пластины
имеют форму колец с перемычками.
Магнитное сопротивление ротора
в направлении перемычек меньше,
и поэтому Ха ф xq. Ротор посажен
на валик с помощью прорезей в перемычках пластин и соединен с редуктором.
Ротор вместе с редуктором заключен в герметический корпус (на рис. 41-6
не показан).
Пуск двигателя происходит за счет асинхронного (вихревого) и гистерезис-нога моментов, а работа — за счет гистерезисного и реактивного моментов, причем последний в 2—3 раза больше гистерезисного. Выпускаемые в СССР реактивно-
гистерезисные двигатели на f = 50 гц типов СД-60, СД-2, СДЛ-2, СРД-2 имеют мощность на валу 12 мквт, а двигатели СД-1/300 — 0,07 мквт (цифры в обозначении типов указывают на скорость вращения выходного конца вала в об/мин). Их к. п. д. менее 1%.
§ 41-4. Тихоходные и шаговые синхронные двигатели
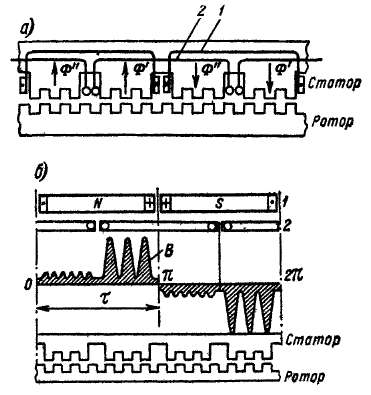
Однофазные тихоходные синхронные реактивные двигатели отличаются тем, что полюсное деление их статора кратно числу зубцовых делений ротора (рис. 41-7, а) или зубцовые деления на полюсах статора равны зубцовым делениям ротора (рис. 41-7, б)
Поток статора Ф этих двигателей пульсирует с частотой тока f. Если при Ф = 0 полюсы (рис. 41-7, а) или зубцы (рис. 41-7, б) статора смещены относительно зубцов ротора, то при возрастании Ф от нуля зубцы ротора притягиваются к полюсам или зубцам статора и ротор по инерции будет поворачиваться и тогда, когда Ф снова уменьшится до нуля. Если к этому времени зубец ротора приблизится к следующему полюсу или зубцу статора, то в течение следующего полупериода1 изменения Ф силы будут действовать на зубцы ротора в том же направлении. Таким образом, если средняя скорость ротора такова, что в течение одного полупериода тока ротор поворачивается на одно зуб-повое деление, то на него будет действовать пульсирующий вращающий момент одного знака и ротор будет вращаться со средней синхронной скоростью
n = 2/1/Za, (41-3)
где Z2 — число зубцов ротора.
Например, если h = 50 гц Рис. 41-7. Однофазные тихоходные син- и 22 = 77 то п= 1,3 об/сек = хронные реактивные двигатели с явно- = 78 об/мин. При питании обмот-выраженными полюсами на статоре (а) кичерез выпрямитель скорость и с зубчатым статором и общей обмоткой уменьшается вдвое.
возбуждения (б)для улучшения условий работы
двигателя и увеличения равномерности вращения ротор обычно выполняется с повышенной механической инерцией. С этой же целью иногда двигатели выполняются с внутренним статором и внешним ротором (например, двигатели электропроигрывателей). Если на полюсах (рис. 41-7, б) оставить только по одному зубцу, то получится двигатель, называемый колесом Ла-Кура.
При включении двигателя в неподвижном состоянии возникает явление при-липания (см. § 25-4), и двигатель необходимо пускать в ход толчком от руки или с помощью встроенного пускового асинхронного двигателя.
Синхронные безредукторные двигатели. На рис. 41-8 показано устройство безредукторного двигателя, разработанного американскими инженерами Л. Чеб-бом и Г. Уотсом. Двигатель имеет двухфазную обмотку с 2р = 2 и фазной зоной 90°. На рис. 41-8 катушки обмотки статора намотаны через спинку, но может быть применена и обмотка обычного типа. Питание обмотки производится от однофазной сети, причем одна из фаз питается через конденсаторы, благодаря чему образуется вращающееся поле. Зубчатый ротор лишен обмотки.
Разность чисел зубцов ротора и статора Z2 — Zt = 2р на рис. 41-8 равна двум. Под воздействием вращающегося поля ротор стремится занять такое поло-

жение, при котором по линии оси магнитного потока зубец ротора встанет против зубца статора (линия А на рис. 41-8). Когда ось потока повернется в положение В, зубец 2' ротора встанет против зубца 2 статора, а при повороте потока от положения А на 180° зубец 9' ротора встанет против зубца 9 статора, т. е. произойдет поворот ротора на одно его зубцовое деление. Поэтому скорость вращения ротора А В
Например, при fx= 50 гц, 2р — 2, Z2= 400 и Zy — 398 будет п= 1/4 об/сек = = 15 об /мин.
Рассматриваемый двигатель работает в сущности по принципу взаимодействия зубцовых гармоник поля, вследствие чего и получается малая скорость вращения. Такой принцип называется электрической редукцией (уменьшением) скорости. Поэтому эти двигатели не нуждаются в механических редукторах и называются безредуктор-ными.
Существуют также другие разновидности безредукторных двигателей. Эти двигатели применяются в случаях, когда необходимы пониженные скорости вращения Снапример, электрические часы и ряд устройств автоматики), а также при использовании источников с повышенной частотой питания f = 400-г- 1000 гц.
Шаговые двигатели питаются импульсами электрической энергии и под воздействием каждого импульса совершают угловое или линейное перемещение
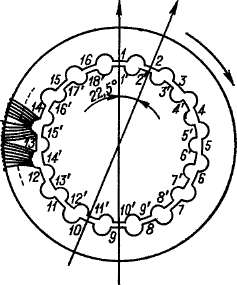
Рис. 41-8. Реактивный безредук-торный синхронный двигатель

Рис. 41-9. Принцип устройства и работы реактивного шагового двигателя
на некоторою, вполне определенную величину, называемую шагом. Эти двигатели применяются для автоматического управления и регулирования, например а металлорежущих станках с программным управлением для подачи резца и т. д. На рис. 41-9 изображен простейший шаговый двигатель с тремя парами полюсов на статоре. При питании током обмотки полюсов индуктора 1—/ четырех-полюсный ротор занимает положение, показанное на рис. 41-9, о, а при питании полюсов 1—1 и 2—2 займет положение, показанное на рис. 41,9, б, отрабогав
шаг 15°. Далее, при отключении обмотки /—/ ротор повернется против часовой стрелки еще на 15° (рис. 41-9, в) и т. д.
Уменьшение шага двигателя достигается увеличением числа полюсов или путем размещения на общем валу нескольких пар статоров и роторов, повернутых относительно друг друга на соответствующий угол. Вместо сосредоточенных обмоток (рис. 41-9) можно применять также распределенные обмотки. Существует целый ряд разновидностей шаговых двигателей вращательного (с шагом до 180°, до 1° и менее) и поступательного движения. Предельная частота следования импульсов, при которой возможен пуск и остановка двигателя без потери шага и которая называется также приемистостью, составляет от 10 до 10000 гц.
§ 41-5. Индукторные синхронные машины
В ряде установок (индукционный нагрев металлов, сварка специальных сплавов, гироскопические и радиолокационные установки- и пр ) применяется одно-или трехфазный ток повышенной частоты (400—30000 гц) Синхронные генераторы нормальной конструкции, имеющие частоту f = pn, для этого случая не подходят,

Рис. 41-10. Устройство одноименнополюсно-го (а) и разноименнополюсного (б) однофазного индукторного генератора
/ — катушка возбуждения; S — корпус; 3 — пакет статора; 4 — обмотка переменного тока; 5 — пакет ротора> 6 — втулка ротора, 7 — вал
Рис 41-11. Кривая поля в зазоре индукторных генераторов» выполненных по схеме рис. 41-10
так как увеличение скорости вращения л у них ограничено условиями механической прочности, а увеличение числа полюсов 2р ограничено минимально возмож* ной величиной полюсного деления по условиям размещения обмоток. Поэтому в этих случаях применяются генераторы особой конструкции, которые называются индукторными и основаны на действии зубцовых пульсаций магнитного потока. Роторы всех видов индукторных генераторов имеют вид зубчатых колее и не имеют обмоток, что повышает надежнбсть их работы, -а обмотки возбужде постоянного тока и якорные обмотки переменного тока располагаются на статора В некоторых случаях вместо обмоток возбуждения применяются постоянные т ниты.
В последнее время начинают находить применение также индукторные двигв* тел и, развивающие при питании током повышенной частоты умеренные скорости вращения. Их устройство аналогично устройству индукторных генераторов

Генератор, изображенный на рис. 41-10, а, имеет по два пакета статора и ротора и кольцевидную обмотку возбуждения. Он называется одноименно-полюсным, так как магнитная полярность каждого пакета вдоль всей окружности неизменна Генератор, показанный на рис. 41-10, б, является однопакет-ным и называется разноименнополюсным. В больших пазах его статора расположена обмотка возбуждения, а в малых пазах — обмотка переменного тока.
Кривая индукции магнитного поля вдоль окружности ротора для генераторов, показанных на рис. 41-10, изображена на рис. 41-11. Можно представить себе, что
Рис. 41-12. Принцип устройства (а) и кривая магнитного поля (б) однофазного индукторного генератора с гребенчатой зубцовой зоной
пульсирующая волна этого поля движется вместе с ротором, а постоянная составляющая магнитного поля неподвижна-относительно статора и э, д. с. в катушке с любым шагом от этого поля равна нулю. Поэтому эта ча,сть потока не производит полезной работы и вызывает ухудшение использования материалов машины. Зубцам ротора придают такую форму, чтобы кривая рис. 41-11 приближалась к синусоиде. Тогда пульсирующая составляющая поля с амплитудой

Шаги катушек этой обмотки должны быть такими, чтобы на рис. 41-10 одна сторона катушки находилась против зубца, а другая — против паза ротора, так как в этом случае э. д. с. переменного тока проводников катушки будут арифметически складываться. Потокосцепления обмоток возбуждения генераторов, показанных на рис. 41-10, при вращении ротора остаются постоянными, и поэтому в этих обмотках переменная э. д. с. не индуктируется, что является положительным фактором.
При / 5= 3000 гц целесообразно применять конструкцию статора, предложенную Гюи. В этой конструкции большие зубцы статора, охватываемые обмотками, имеют гребенчатую форму и зубцы соседних полюсов статора сдвинуты относительно зубцов ротора на половину зубцового деления (рис. 41-12). Благодаря этому потоки различных половинок полюсов Ф' и Ф" различны (рис. 41-12, б) и при смещении ротора на половину зубцового деления поток, сцепляющийся с катушкой
Рис. 41-13. Принцип устройства трехфазного индукторного генератора с гребенчатой зубцовой зоной
обмотки якоря 2, изменяется от значения 4- (Ф' — Ф") до значения — (Ф' — Ф") и в этой обмотке индуктируется э. д. с. частоты /, определяемой равенством (41-5). В то же время потокосцепление с обмоткой возбуждения 1 не изменяется.
Применяются и другие разновидности индукторных машин. В трехфазных машинах вместо двух больших зубцов, как на рис. 41-10, на протяжении двойного полюсного деления выполняется шесть больших зубцов и малые зубцы соседних больших зубцов статора сдвинуты относительно зубцов ротора не на половину, а на одну шестую часть малого зубцового деления (рис. 41-14). Благодаря этому потоки соседних больших зубцов статора изменяются со сдвигом по фазане на 180°, а на 60°, что используется для получения в фазах А, В, С обмотки якоря э. д. с, сдвинутых на 120°.
Вследствие повышенной частоты обмотка якоря индукторной машины имеет повышенные синхронные сопротивления х^ и xq. Поэтому для улучшения характеристик этой машины последовательно с обмоткой якоря во многих случаях включаются конденсаторы.
§ 41-6. Некоторые другие разновидности синхронных машин
Электромагнитная муфтаслужит для гибкого соединения двух вращающихся валов, например вала дизеля судовой силовой установки с валом гребного винта. В конструктивном отношении электромагнитная муфта представляет собой явно-полюсную синхронную машину, индуктор которой, возбуждаемый постоянным током, укреплен на одном валу (например, ведущем), а якорь укреплен на другом валу (например, ведомом). Обмотка якоря может быть фазной (в этом случае она соединяется с реостатом) или короткозамкнутой в виде беличьей клетки.
Если ведущий и ведомый валы вращаются со скоростями ях и п% (причем пх Ф п2), то в обмотке якоря муфты индуктируется ток частоты

и создается электромагнитный момент, под воздействием которого и совершается вращение ведомого вала. При короткозамкнутой обмотке якоря скольжение ведомого вала относительно ведущего
составляет 0,01 — 0,03. При фазной обмотке якоря скольжение s и скорость гц можно регулировать путем изменения сопротивления реостата или тока возбуждения.
Электромагнитная муфта позволяет осуществлять плавное присоединение и отключение ведомого вала при вращающемся первичном двигателе, а при фазной обмотке также регулирование скорости вращения. Кроме того, муфта защищает рабочий механизм от больших перегрузок, так как при большом тормозном моменте ведомый вал останавливается. Если пуск ведомого вала производится при вращении ведущего вала со скоростью % = па, то частота f велика и для получения достаточного пускового момента короткозамкнутую обмотку якоря нужно выполнить с использованием эффекта вытеснения тока (см. гл. 27).
Электромагнитные муфты обычно строятся мощностью до Рн = 500 кет.
Бесконтактные синхронные машины с когтеобразными полюсами. В современных промышленных и транспортных установках нередко синхронные машины по условиям надежности необходимо выполнять без скользящих контактов на роторе. В этих случаях можно применять синхронные машины без обмотки возбуждения (реактивные), а при повышенных частотах также индукторные и редуктор-ные машины. Однако можно также использовать машины с когтеобразным ротором и неподвижной обмоткой возбуждения. Такие машины строятся по такому же принципу, как и бесконтактные сельсины (см. рис. 31-9), но обычно с 2р > 2. При / = 50 гц их целесообразно строить мощностью до Рн = 20 -г- 30 кет.
Ударные синхронные генераторы применяются для испытания выключателей высокого напряжения на мощность отключения. Они строятся на базе турбогенераторов мощностью до 50—200 Мет и работают в режиме внезапного короткого замыкания. Для получения возможно большего тока короткого замыкания они изготовляются с пониженными индуктивными сопротивлениями рассеяния и с надежным креплением обмоток, в особенности их лобовых частей.
Существуют и разрабатываются также некоторые другие разновидности синхронных машин.
lektsia.com
Cтраница 2
В асинхронных двигателях малой мощности выводы от колец выполняют в виде шинок 3 ( рис. 20) прямоугольного сечения, которые припаивают к кольцам 4 твердым припоем. В некоторых случаях для размещения шинок во втулке / предусматриваются три продольных паза. Такая конструкция обеспечивает минимальный диаметр колец и возможность их использования при эксплуатации почти до полного износа. Между кольцами устанавливают изоляционные шайбы 5, которые выступают за наружную поверхность колец, надежно изолируя их друг от друга. Втулку изолируют формовочным миканитом 2 или бакелизированной бумагой. [17]
В асинхронных двигателях малой мощности выводы от колец выполняют в виде шинок 3 ( рис. 45) прямоугольного сечения, которые припаивают к кольцам 4 твердым припоем. В некоторых случаях для размещения шинок во втулке / предусматриваются три продольных паза. Такая конструкция обеспечивает минимальный диаметр колец и возможность их использования при эксплуатации почти до полного износа. Между кольцами устанавливают изоляционные шайбы 5, которые выступают за наружную поверхность колец, надежно изолируя их друг от друга. [18]
В асинхронных двигателях малой мощности и в микродвигателях часто активное сопротивление обмотки ротора ( беличьей клетки) делается значительно большим, чем в двигателях общего применения. В этом случае скольжение двигателя при нагрузке сильно возрастает и зависимость Mf ( s) имеет максимум при скольжении sKp, близком к единице. [19]
В асинхронных двигателях малой мощности в целях устранения магнитного шума можно применять также массивный ротор без обмотки, внешняя поверхность которого должна быть покрыта тонким слоем меди гальваническим путем. [20]
В асинхронных двигателях малой мощности для удобства первые катушки укладывают только в нижнюю часть пазов, а последние по ходу укладки катушки - только в верхнюю. Это создает небольшую асимметрию, но зато исключает необходимость держать верхние стороны катушек на протяжении первого шага навесу. [21]
В асинхронных двигателях малой мощности ударные значения пусковых моментов и токов практически не зависят от момента сопротивления. С увеличением момента нагрузки возрастает лишь время пуска двигателя. Относительные значения ударных моментов и токов в микродвигателях значительно меньше, чем в машинах большой мощности, за счет большего активного сопротивления обмотки статора. Ударный момент определяется токами переходного режима и вследствие этого отличается от начального пускового момента, найденного из режима короткого замыкания двигателя. [22]
Фазные роторы асинхронных двигателей малой мощности обычно имеют всытшую обмотку, которая практически не отличается от аналогичной обмотки якорей машин постоянного тока сравнимой мощности. [23]
Защитные устройства асинхронных двигателей малой мощности / / Пром. [24]
Большое количество асинхронных двигателей малой мощности, имеющих специальное конструктивное исполнение на базе двигателей серий А2, А4 и др., применяется для электрических талей и кран-балок специального исполнения. [26]
При проектировании и выполнении трехфазных и однофазных моментных асинхронных двигателей малой мощности следует стремиться к получению заданных моментов при минимальной потребляемой мощности. Эта мощность практически равна потерям в меди обмоток статора и ротора и определяет тепловой режим двигателя в заторможенном состоянии. Потери в стали этого двигателя обычно относительно малы вследствие небольших индукций в отдельных участках его магнитной системы. [27]
По конструктивному выполнению сельсины подобны асинхронным двигателям малой мощности. На рис. 17 - 9 показана фотография статора сельсина с явными полюсами, ротора, имеющего скошенные пазы, и подшипникового щита с выводами статора и ротора. [29]
Страницы: 1 2 3 4
www.ngpedia.ru









