





ОП ИСАНИЕ
ИЗОБРЕТЕН ИЯ
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ
Союз Советск ни
Социалистических
Республик
Н 02 К 19/08
Пкударстеенный комитет
СССР (23) Приоритет
Опубликовано 05.01.80, Бюллетень Рй 1
Дата опубликования описания 05.01.80
00 делам изобретений н открытий (53) УД (621.313. .323 (088.8) .
И. А. Вевюрко, И. И. Горжевский. А. С. Дорохов, И. С. Звягинцев и С. А. Стома (72) Авторы изобретения (7l) Заявитель (54) МНОГОПОЛЮСНЫЙ СИНХРОННЫЙ
ЭЛЕКТРОДВИГАТЕЛЬ
Изобретение относится к электрическим машинам, а именно к гистерезисным электродвигателям.
Известны синхронные электродвигатели, содержащие статор и ротор с постоянным магнитом (11.
Недостатком такой конструкции является отклонение положения фазы ротора относительно фазы питающего напряжения при изменении нагрузки, а также трудность получения низкой частоты вращения.
Известны также многополюсные синхронные .электродвигатели, содержащие статор с многофазной обмоткой и ротор, активная часть которого выполнена из магнитотвердого материала (2).
Недостаток этой конструкции двигателя заключается в нестабильности начальной фазы ротора при входе в синхронизм и фазы ротора относительно напряжения в синхронном режиме.
Целью изобретения является обеспечение синфаэности вращения ротора с задающим сигналом.
Это достигается тем, что электродвигатель снабжен дополнительным статором с двухполюсной однофазной обмоткой с выводами для подключения к источнику однополярных
5 импульсов, размещенным в корпусе соосно с основным, а внутри него на валу ротора установлен дзухполюсный постоянный магнит. Обмотка дополнительного статора может быть выполнена из двух частей, магнитные оси которых смещены относительно друг
10 другa по окружности
На фиг. 1 представлен предлагаемый электродвигатель; на фиг. 2 - то же, продольный разрез.
Электродвигатель содержит корпус 1 со
15 статором 2 и дополнительным статором 3, на котором установлена двухполюсная однофазная обмотка 4, подключенная к источнику однополярных импульсов (на чертеже
20 не показан). На валу 5 расположен ротор
6, активная часть 7 которого выполнена из магнитотвердого материала, и двухполюсный постоянный магнит 8, размещенный внутри дополнительного статора 3.
708471 б
4иг. f
Фиа 2
Составитель В. Трегубов
Редактор В. Фельдман Техред Л.Алферова Корректор Е. Лукач
Заказ 85 11/51 Тираж 783 Подписное
ЦНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП "Патент", г. Ужгород, ул. Проектная, 4
Принцип действия электродвигателя основан на использовании возможности синхронного вращения ротора 6 гистереэисного электродвигателя с произвольной начальной фазой, При подаче импульса тока в обмотку 4 возникает момент, который при соответствующей величине импульса превосходит момент опрокидывания гистерезисного электродвигателя. При этом гистерезисный электродвигатель переходит в синхронный режим работы (происходит изменение фазы ротора 6 гистерезисного электродвигателя) .
По окончании действия импульса ротор
6 гистереэисного электродвигателя начинает вращаться синхронно, но и новой начальной фазой. При подаче серии импульсов с переодичностью, равной частоте вращения ротора 6 гистерезисного электродвигателя, результирующая начальная фаза будет соответствовать совпадению магнитных осей обмотки 4 и постоянного магнита 8 в момент подачи импульса тока.
При наличии нескольких частей обмотки
4, магнитные оси которых смещены относительно друг друга, начальная фаза ротора 6 в процессе работы может изменяться в зависи. мости от того, на какую из частей обмотки
4 подается импульс тока.
Изобретение позволяет обеспечить однозначную установку и стабильность начальной фазы ротора гистерезисного электродвигателя, Формула изобретения
1. Многополюсный синхронный электродвигатель содержащий корпус, внутри которого установлен статор с многофазной обмоткой и ротор, активная часть которого выполнена из магнитотвердого материала, о т л ич а ю шийся тем, что, с цель о обеспечения синфазности вращения ротора с задающим сигналом, электродвигатель снабжен дополнительным статором с двухполюсной однофазной обмоткой с выводами для подключения к источнику однополярных импульсов расположенным в корпусе соосно с основным, а внутри него на валу ротора установлен двухполюсный постоянный магнит.
2, Электродвигатель по п. 1, о т л ич. а ю шийся тем, что для получения различной начальной фазы ротора в синхрон2В ном режиме двигателя обмотка дополнительного статора выполнена из двух частей, магнитные оси которых смещены относительно друг друга по окружности.
Источники информации, принятые во внимание при экспертизе
1. Юферов Ф. М. и др. Синхронные микродвигатели с постоянными магнитами М., "Энергия"; 1976, с. 65-67.
2. Мастаев Н. 3. и Орлов И. Н. Гистерезисные электродвигатели МЭИ, 1963, с. 5-15.


www.findpatent.ru
Сначало надо подобрать подходящий двигатель, который наиболее подойдёт для работы в качестве низкооборотистого генератора. Это многополюсные асинхронные двигатели, хорошо подходят 6-ти и 8-ми полюсные, низкооборотистые двигатели, с максимальными оборотами в режиме двигателя не более 1350об/м. Такие двигатели имеют наибольшее количество полюсов и зубцов на статоре.
Далее нужно разобрать двигатель и извлечь якорь-ротор, который надо сточить на станке до опредлённых размеров под наклеивание магнитов. Магниты неодимые, обычно клеят маленькие круглые магнитики. Сейчас я попробую расказать как и сколько магнитов клеить.
Для начала нужно узнать сколько у вашего мотора полюсов, но по обмотке это понять достаточно трудно без соответствующего опыта, поэтому количество полюсов лучше прочитать на маркировке двигателя, если она конечно имеется, хотя в большенстве случаев она имеется. Ниже приведён пример маркировки двигателя и расшифровка маркировки.
По марке двигателя. Для 3х фазных: Тип двигателя Мощность, кВт Напряжение, В Частота вращения, (синх.), об/мин КПД, % Масса, кг
 >
>
Например: ДАФ3 400-6-10 УХЛ1 400 6000 600 93,7 4580 Расшифровка обозначения двигателя: Д - двигатель; А - асинхронный; Ф - с фазным ротором; 3 - закрытое исполнение; 400 - мощность, кВт; б - напряжение, кВ; 10 - число полюсов; УХЛ - климатическое исполнение; 1 - категория размещения.
Бывает так, что двигатели не нашего производства как на фото выше, и маркировка непонятна, или маркировка просто не читаема. Тогда остаётся один метод, это посчитать сколько у вас зубцов на статоре и сколько зубцов занимает одна катушка. Если наприер катушка занимает 4 зубца, а их всего 24, то ваш мотор шестиполюсной.
Количество полюсов статора нужно знать для того, чтобы определиться с количеством полюсов при наклейке магнитов на ротор. Это количество обычно равное, то-есть если полюсов статора 6, то и магниты надо клееть с чередованием полюсов в количестве 6, SNSNSN.
Теперь, когда число полюсов известно надо рассчитать число магнитов для ротора. Для этого надо выссчитать длинну оружности ротора, по простой формуле 2nR где n=3,14. Тоесть 3,14 умножаем на 2 и на радис ротора, получается длинна окружности. Длее замеряем свой ротор по длинне железа, которое в алюминиевой оправке. После можно нарисовать полученную полосу с длинной и шириной, можно на компьютере и потом распечатать.
Терерь нужно определится с толщиной магнитов, она примерно равна 10-15% от диаметра ротора, например если ротор 60мм, то магниты нужны толщиной 5-7мм. Для этого магниты покупают обычно круглые. Если ротор примерно 6см вдиаметре, то магниты можно высотой 6-10 мм. Определившись какие магниты использовать, на шаблоне длинна которой равна длинне окрушности
Пример рассчёта магнитов для ротора, например диаметр ротора 60см, высчитываем длинну окружности =188см. Делим длинну на количество полюсов, в данном случае на 6, и получаем 6 секций, в каждой секции магниты вклеиваются одинаковым полюсом. Но это ещё не всё. Терепь надо высчитать сколько магнитов войдёт в один полюс, чтобы их ровно распределить по полюсу. Например ширина круглого магнита 1см,расстояние между магнитами около 2-3мм, значит 10мм +3=13мм.
Длинну окружности делим на 6 частей=31мм, это ширина одного полюса по длинне окружности ротора, а ширина полюса по железу, дапустим 60мм. Значит получается площаадь полюса 60 на 31 мм. Это получается 8 в 2 ряда магнитов на полюс с расстоянием между собой 5мм. В этом случае надо пересчитать количество магнитов, чтобы они как можно плотнее уместились на полюсе.
Сдесь пример на магнитах шириной 10мм, поэтому получается расстояние между ними 5мм. Если уменьшить диаметр магнитов например в 2 раза, то-есть 5мм, то они более плотно заполнят полюс вследствие чего увеличится магнитное поле от большего каличества общей массы магнитом . Таких магнитов(5мм) поместится уже 5 рядов , а в длинну 10, то-есть 50 магнитов на полюс, и общее количество на ротор 300шт.
Для того чтобы уменьшить залипание шаблон нужно разметить так, чтобы смещение магнитов при наклейке было на ширину одного магнита, если ширина магнита 5мм, то и смещение на 5мм.
 >
>
Теперь когда с магнитами опрделились нужно проточить ротор, чтобы поместились магниты. Если высота магнитов 6мм, то стачивается диамет на 12+1мм, 1мм это запас на кривезну рук. Магниты можно разместить на роторе двумя способами.
Первый способ это предвартельно делается оправка, в которой сврлятся отверстия под магниты по шаблону, после оправка одевается на ротор, и магниты вклеиваются в просверленые отверстия. На роторе после проточки нужно дополнительно сточить на глубину равную высоте магнитов разделительный алюминиевые полоски между железом. А полученные бороздки заполнить отожжоными опилками смешаные с эпоксидным клеем. Это значительно уведличит эффективность, опилки будут служить дополнительным магнитопроводом между железом ротора. Выборку можно сделать отрезной машинкой или на станке.
Оправка для наклейки магнитов делается так, проточеный вал оборачивают полеинтеленом, потом наматывают слой за слоем бинт, пропитанный эпоксидным клеем, после стачивают на станке под размер и снимают с ротора, наклеивают шоблон и сверлют отверстия под магниты.После девают оправку обратно на ротор и наклеивают магниты Клеют обычно на эпоксидный клей Ниже на фото два примера наклейки агнитов, первый пример на 2-х фотоэто наклейка магнитов с помощъю оправки, а второй на следующей странице прямо через шаблон.На первых двух фотографиях хорошо видно и я думаю понятно как клеются магниты.
 >
>
 >
>
На следующей странице продолжение. читать далее..,
www.otchelniki.ru
Электротехническая промышленность является ведущей отраслью народного хозяйства СССР. Ее продукция используется почти во всех промышленных установках, в сельском хозяйстве, в быту. Электрические машины в общем объеме производства электротехнической промышленности занимают основное место, их эксплуатационные свойства имеют важное значение для всей экономики в целом.
Повышение культурного уровня и благосостояния советских людей вызывает необходимость расширения производства и совершенствования бытовых приборов, облегчающих условия труда и способствующих комфортному отдыху. К таким приборам относятся, в частности, приборы микроклимата, в которых в качестве приводных двигателей используются однофазные асинхронные двигатели различных конструкций, характерной особенностью которых является большое число полюсов (2р >16) при числе пазов на полюс и фазу равном единице.
Стремление довести до минимума число передаточных звеньев между двигателем и функционально-исполнительным механизмом часто приводит к разработке двигателей специальных исполнений. Высокие темпы роста производства этих двигателей и большие объемы их выпуска делают важной задачу улучшения их качества, снижения материалоемкости, повышения энергетических показателей. Этого можно добиться применением новых, более экономичных материалов, новой прогрессив* ной технологии. Экономия материальных и энергетических ресурсов может быть достигцута и за счет расчетной оптимизации.
Однако существующие методики расчета однофазных асинхронных двигателей, разработанные применительно к машинам с небольшим числом полюсов (2р ^ 6), не дают удовлетворительных результатов при использовании их для многополюсных однофазных асинхронных двигателей. Они не учитывают конструктивно-технологических особенноетей многополюсных машин, в первую очередь малую величину полюсного деления и относительно большое раскрытие пазов. Это приводит к неточному определению индуктивных параметров обмоток машин, связанных с магнитным полем в воздушном зазоре и полями рассеяния этих двигателей.
Отсутствие достаточно точных математических моделей приводило при разработке многополюсных однофазных асинхронных двигателей к большим затратам времени и расходам на макетирование, экспериментальные исследования и доводку.
В связи с этим возникает необходимость создания уточненных математических моделей с применением новых методов исследования электромагнитных и электромеханических характеристик, адекватно отражающих реальные физические процессы в машинах.
Перед диссертантом стояла задача создания математической модели многополюсных однофазных асинхронных двигателей с сосредоточенными обмотками, учитывающей их конструктивные и технологические особенности, бесконечный спектр пространственных гармонических магнитного поля в воздушном зазоре, и разработка на ее основе новых двигателей с улучшенными технико-экономическими показателями.
Для достижения поставленной цели в диссертации решались следующие основные вопросы:
1. Исследование магнитного поля в воздушном зазоре многополюсных однофазных асинхронных двигателей с сосредоточенными обмотками.
2. Исследование магнитного поля рассеяния обмоток двигателей.
3. Уточнение индуктивных параметров двигателей.
4. Создание новой математической модели многополюсных однофазных асинхронных двигателей с сосредоточенными обмотками.
5. Создание комплекса алгоритмов и программ поверочных и оптимизационных расчетов многополюсных однофазных асинхронных двигателей.
6. Разработка многополюсных двигателей для потолочных вентиляторов с улучшенными технико-экономическими показателями.
Первая глава диссертации посвящена обзору конструкций, методов расчета и оптимального проектирования многополюсных однофазных асинхронных двигателей.
Во второй главе исследуется поле в воздушном зазоре многополюсных однофазных асинхронных двигателей с учетом их конструктивно-технологических особенностей. Проводится гармонический анализ поля.
В третьей главе результаты исследования магнитного поля в воздушном зазоре используются для определения индуктивных параметров двигателей. Записана система уравнений электрического равновесия однофазных двигателей с произвольным углом сдвига между фазами. На ее основе как частные случаи рассматриваются конденсаторные двигатели и двигатели с экранированными полюсами.
Четвертая глава посвящена определению индуктивного сопротивления пазового рассеяния короткозамкнутого витка, основанному на расчете методом конечных элементов магнитного поля тока в произвольно расположенном в пазу проводнике.
В пятой главе рассмотрены вопросы оптимизационного проектирования многополюсных однофазных асинхронных двигателей и выработаны рекомеццации по улучшению их энергетических и массо-габаритных показателей. Разработаны и внедряются в производство двигатели для потолочных вентиляторов ВПК15-"Союз", ВП9-"Зангезур" и ВП12-пЗанзе1,ури с улучшенными технико-экономическими показателями.
При исследовании многополюсных однофазных асинхронных двигателей в работе использованы аналитические, экспериментальные и численные методы, а также методы физического моделирования. Все расчеты проведены с применением ЭВМ. Программы для ЭВМ написаны на алгоритмическом языке ФОРТРАН и построены по блочному принципу.
Создание математической модели многополюсных однофазных асинхронных двигателей с сосредоточенными обмотками, опирающейся на исследование магнитного поля и теорию цепей, и на ее основе алгоритма и программ автоматизированного поиска оптимального варианта машины позволяет при разработке двигателей нового поколения обеспечить экономию энергетических и материальных ресурсов, повысить уровень качества и значительно сократить общие сроки проектирования с одновременным уменьшением объема макетных испытаний и доводочных работ.
I. ОБЗОР КОНСТРУКЦИИ МНОГОПОЛЮСНЫХ ОДНОФАЗНЫХ АСИНХРОННЫХ ДВИГАТЕЛЕЙ И ОСОБЕННОСТИ ИХ РАСЧЕТА
ОБЗОР ЛИТЕРАТУРЫ)
www.dissercat.com
Асинхронный электродвигатель имеет две основные части – статор и ротор. Статором называется неподвижная часть машины. С внутренней стороны статора сделаны пазы, куда укладывается трехфазная обмотка, питаемая трехфазным током. Вращающаяся часть машины называется ротором, в пазах его тоже уложена обмотка. Статор и ротор собираются из отдельных штампованных листов электротехнической стали толщиной 0,35-0,5 мм. Отдельные листы стали изолируются один от другого слоем лака. Воздушный зазор между статором и ротором делается как можно меньше (0,3-0,35 мм в машинах малой мощности и 1-1,5 мм в машинах большой мощности).
В зависимости от конструкции ротора асинхронные двигатели бывают с короткозамкнутым и с фазным роторами. Наибольшее распространение получили двигатели с короткозамкнутым ротором, они просты по устройству и удобны в эксплуатации.
Трехфазная обмотка статора помещается в пазы и состоит из ряда катушек, соединенных между собой. Каждая катушка сделана из одного или нескольких витков, изолированных между собой и от стенок паза.

На рис. 1, а показана обмотка статора асинхронного двигателя. У этой обмотки каждая катушка состоит из двух проводников. Обмотка, состоящая из трех катушек, создает магнитное поле с двумя полюсами. За один период трехфазного тока магнитное поле сделает один оборот. При частоте 50 Гц это будет соответствовать 50 об/сек, или 3000 об/мин.
На рис. 1, б показана обмотка, у которой каждая сторона катушки состоит из двух проводников.
Скорость вращения магнитного поля четырехполюсного статора вдвое меньше скорости вращения поля двухполюсного статора, т. е. 1500 об/мин (при 50 Гц). Обмотка четырехполюсного статора с одним проводником на полюс и фазу показана на рис. 1, в, а с двумя проводниками на полюс и фазу – на рис. 1, г. Магнитное поле шестиполюсного статора имеет втрое меньшую скорость, чем двухполюсного, т. е. 1000 об/мин (при 50 Гц). Обмотка шестиполюсного статора с одним проводником на полюс и фазу представлена на рис. 1, д. Число всех пазов на статоре равно утроенному произведению числа полюсов статора на число пазов, приходящееся на полюс и фазу.
Асинхронный двигатель с короткозамкнутым ротором является самым распространенным из электрических двигателей, применяемых в промышленности. Устройство асинхронного двигателя следующее. На неподвижной части двигателя – статоре 1 – размещается трехфазная обмотка 2 (рис. 2), питаемая трехфазным током. Начала трех фаз этой обмотки выводятся на общий щиток, укрепленный снаружи на корпусе двигателя.
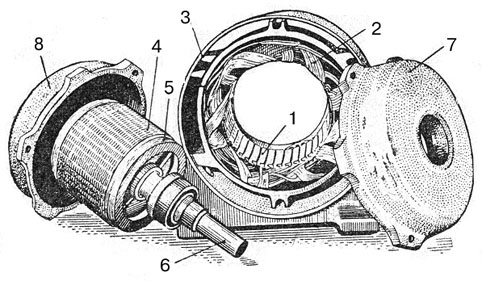 Рис. 2. Асинхронный двигатель с короткозамкнутым ротором
Рис. 2. Асинхронный двигатель с короткозамкнутым ротором Собранный сердечник статора укрепляют в чугунном корпусе 3 двигателя. Вращающуюся часть двигателя – ротор 4 – собирают также из отдельных листов стали. В пазы ротора закладывают медные стержни, которые с двух сторон припаивают к медным кольцам 5.
 Рис. 3. Короткозамкнутый ротора - ротор с короткозамкнутой обмоткой, б - "беличье колесо", в - короткозамкнутый ротор, залитый алюминием;1 - сердечник ротора, 2 - замыкающие кольца, 3 - медные стержни, 4 - вентиляционные лопатки
Рис. 3. Короткозамкнутый ротора - ротор с короткозамкнутой обмоткой, б - "беличье колесо", в - короткозамкнутый ротор, залитый алюминием;1 - сердечник ротора, 2 - замыкающие кольца, 3 - медные стержни, 4 - вентиляционные лопатки Таким образом, все стержни оказываются замкнутыми с двух сторон накоротко. Если представить себе отдельно обмотку такого ротора, то она по внешнему виду будет напоминать «беличье колесо». В настоящее время у всех двигателей мощностью до 100 кВт «беличье колесо» делается из алюминия путем заливки его под давлением в пазы ротора. Вал 6 вращается в подшипниках, закрепленных в подшипниковых щитах 7 и 8. Щиты при помощи болтов крепятся к корпусу двигателя. На один конец вала ротора насаживается шкив для передачи вращения рабочим машинам или станкам.
Устройство статора асинхронного двигателя с фазным ротором и его обмотка не отличаются от устройства статора двигателя с короткозамкнутым ротором. Различие между этими двигателями заключается в устройстве ротора.
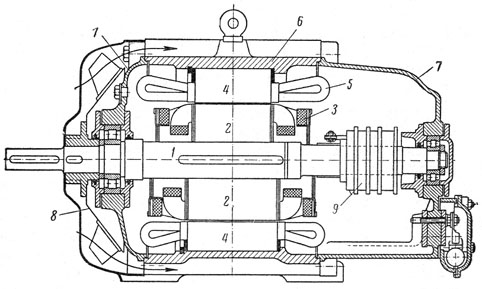 Рис. 4. Разрез асинхронного двигателя с фазным ротором1 - вал двигателя, 2 - ротор, 3 - обмотка ротора, 4 - статор, 5 - обмотка статора, 6 - корпус, 7 - подшипниковые крышки, 8 - вентилятор, 9 - контактные кольца
Рис. 4. Разрез асинхронного двигателя с фазным ротором1 - вал двигателя, 2 - ротор, 3 - обмотка ротора, 4 - статор, 5 - обмотка статора, 6 - корпус, 7 - подшипниковые крышки, 8 - вентилятор, 9 - контактные кольца Фазный ротор имеет три фазные обмотки, соединенные между собой звездой (реже треугольником). Концы фазных обмоток ротора присоединяют к трем медным кольцам, укрепленным на валу ротора и изолированным как между собой, так и от стального сердечника ротора, вследствие чего этот двигатель получил также название двигателя с контактными кольцами. Три кольца жестко насажены на вал ротора (через изоляционные прокладки). На кольца накладываются щетки, которые размещены в щеткодержателях, укрепленных на одной из подшипниковых крышек.
Щетки, скользящие по поверхности колец ротора, все время имеют с ними хороший электрический контакт и соединены, таким образом, с обмотками ротора. Щетки соединены с трехфазным реостатом.
Источник: Кузнецов М. И. Основы электротехники. Учебное пособие. Изд. 9-е, Исправленное. «Высшая школа», 1964.
izoterm.ucoz.ua
  Другие журналы |  Исследование многополюсного асинхронного тягового частотно-регулируемого двигателя. # 05, май 2014 DOI: 10.7463/0514.0709521авторы: профессор, д.т.н. Беспалов В. Я., профессор, д.т.н. Красовский А. Б., доцент к.т.н. Панихин М. В., доцент к.т.н. Фисенко В. Г.
Рассмотрены особенности применения тяговых асинхронных электродвигателей в трансмиссиях транспортных средств. Показано, что одним из важнейших этапов их проектирования является выбор числа полюсов. В тяговых электроприводах часто применяются двигатели с повышенным числом полюсов без всесторонней оценки такого решения. В статье исследованы динамические и энергетические характеристики многополюсного тягового асинхронного двигателя (ТАД), спроектированного и изготовленного для применения в индивидуальном электроприводе большегрузных колесных машин. Приведены описание основных функциональных элементов имитационной модели электропривода в среде Matlab с приложениями Simulink и SimPower Systems в структуре с векторным управлением и результаты имитационного моделирования его динамической механической характеристики. Установлено, что из-за повышенной частоты изменения токов многополюсного двигателя в области высоких скоростей происходит чрезмерное снижение момента, что снижает возможности выполнения требований заданной тяговой характеристики. Это является следствием искажения формы фазного тока двигателя в области высоких скоростей из-за неспособности источника силового питания компенсировать возрастающую по мере роста скорости ЭДС движения. Исследовано влияние повышенных частот токов на добавочные потери в двигателе. Анализ глубины проникновения электромагнитного поля в медный проводник обмотки статора на высокой частоте позволил установить значительное проявление скин – эффекта. Количественная оценка этому явлению дана по результатам численного расчета распределения электромагнитного поля в пазу статора. Установлено значительное увеличение добавочных потерь в двигателе и даны оценки степени ослабления потока из-за демпфирующего действия вихревых токов в шихтованной стали статора на повышенных частотах. Обоснован альтернативный вариант тягового асинхронного двигателя с улучшенными характеристиками. Полученные результаты могут быть использованы при проектировании тяговых электроприводов транспортных средств на базе асинхронных двигателей. Список литературы1. Златин П.А., Кеменов В.А., Ксеневич И.П. Электромобили и гибридные автомобили. М.: Агроконсалт, 2004. 416 с.2. Флоренцев С., Изосимов Д. Тяговый электропривод в гибридных транспортных средствах. Часть 1. Идеология проектирования КТЭО // Электронные компоненты. 2009. № 11. С. 13-18.3. Флоренцев С., Изосимов Д. Тяговый электропривод в гибридных транспортных средствах. Часть 2. Идеология проектирования КТЭО // Электронные компоненты. 2009. №.12. С. 65-73.4. Проектирование электрических машин: учеб. для вузов / И.П. Копылов, Б.К. Клоков, В.П. Морозкин, Б.Ф. Токарев; Под ред. И.П. Копылов а. 3-е изд., испр. и доп. М.: Высшая школа, 2002 . 757 с.5. Гольдберг О.Д., Свириденко И.С. Проектирование электрических машин. М.: Высшая школа, 2006. 430 с.6. Балагуров В. А. Проектирование специальных электрических машин переменного тока: учеб. пособие для студентов вузов. М.: Высшая школа, 1982. 272 с.7. Boldea I., Nasar S.A. The Induction Machines Design Handbook. 2nd ed. CRC Press, 2009. 845 p.8. Quang N.P., Dittrich J.-A. Vector Control of Three-Phase AC Machines. Springer Berlin Heidelberg, 2008. DOI: 10.1007/978-3-540-79029-7 9. Marino R., Tomei P., Verrelli C.M. Induction Motor Control Design. Springer London, 2010. 351 p. DOI: 10.1007/978-1-84996-284-110. Ключев В.И. Теория электропривода. М.: Энергоатомиздат, 1998. 704 с.11. Розанов Ю.К., Рябчицкий М.В., Кваснюк А.А. Силовая электроника. М.: МЭИ, 2009. 632 с.12. Герман-Галкин С.Г. Matlab & Simulink. Проектирование мехатронных систем на ПК. СПб.: КОРОНА-Век, 2008. 368 с.13. Универсальный метод расчета электромагнитных процессов в электрических машинах / А.В. Иванов-Смоленский, Ю.В. Абрамкин, А.И. Власов, В.А. Кузнецов; Под ред. А.В. Иванова-Смоленского. М.: Энергоатомиздат, 1986. 216 с. Публикации с ключевыми словами: имитационное моделирование, тяговый электропривод, многополюсный асинхронный двигатель, тяговая характеристика, скин-эффект, коэффициент увеличения добавочных потерь Публикации со словами: имитационное моделирование, тяговый электропривод, многополюсный асинхронный двигатель, тяговая характеристика, скин-эффект, коэффициент увеличения добавочных потерь Смотри также: Тематические рубрики: |
engineering-science.ru










