| Для подачи питания на обмотки ротора коллекторного двигателя постоянного тока используется встроенный коммутатор, получивший наименование коллектор. Конструктивный элемент состоит из медных пластин, изолированных друг от друга с помощью диэлектрика. По пластинам скользят графитовые щетки, попеременно подавая электрическое напряжение на разные обмотки ротора. В результате образуется переменное магнитное поле, взаимодействующее с постоянным полем статора. Так электрическая энергия преобразуется в механическую и вал двигателя начинает вращаться. На производстве и в быту применяется мотор-редуктор — система, состоящая из электродвигателя и редуктора. В качестве примера можно привести схему движения щеток лобового стекла автомобиля. Вращение ротора передается на цилиндрические колеса с косыми зубьями, которые приводят дворники в рабочее положение. Регулирование оборотов двигателя постоянного тока методом ШИМГлавные характеристики электродвигателя — мощность, скорость вращения и крутящий момент (иногда еще выделяют момент инерции ротора). От этих величин зависит, сможет ли электропривод справиться с возложенными на него задачами. В большинстве электрических сетей используется переменный ток, который перед подачей на щетки электромотора нужно сделать постоянным. Для этого используют выпрямители, в их схеме нередко предусмотрена возможность добавления дополнительных сегментов для регулировки напряжения. Основной недостаток выпрямителя заключается в том, что при его работе происходит существенная потеря мощности, а значит, снижается КПД и часть электроэнергии уходит в никуда. Для того, чтобы управление двигателем постоянного тока было эффективным, применяют широтно-импульсную модуляцию, сокращенно ШИМ. Принцип действия ШИМ можно объяснить на простом примере: если взять электрический мотор малой мощности и запитать его от батарейки, вал двигателя будет вращаться с максимальной скоростью, но если попеременно замыкать и размыкать контакты, идущие к источнику питания, частота вращения ротора изменится, какое-то время он будет двигаться по инерции. На щетки коллектора подается полное напряжение, а ШИМ позволяет установить точное время подачи. Способ дает возможность управлять вращением вала с применением цифровых микроконтроллеров. Изменение скорости вращения ротораРегулятор оборотов коллекторного двигателя подает на щетки импульсы. Например, максимальное напряжение электромотора 12 Вольт, а нам нужно, чтобы он работал в половину своей силы. Как реализовать это на практике, используя широтно-импульсную модуляцию? Для этого нужно рассмотреть понятие импульса — всплеска напряжения. Если таких всплесков в течение 1 секунды случается 10, то говорят о том, что частота импульсов составляет 10 Герц. То есть, за секунду на щетки электродвигателя 10 раз подается полное напряжение. Для начала нужно определить период следования импульсов T по формуле: T=1/F, где F — это частота. В нашем случае частота равна 10 Гц, тогда: T=1/10=0,1 с, то есть, напряжение поднимается от 0 Вольт до 12 и снова опускается до 0 за 0,1 секунды. Еще одной важной характеристикой импульса является скважность S — это отношение периода следования к продолжительности импульса, не имеющее единиц измерения. Параметр определяется по формуле: S=T/t, где t — длина импульса. В нашем случае длина импульса составит половину от периода следования импульса, ведь нам нужен мотор, работающий вполсилы. Тогда получим: S=0,1/0,05=2. Теперь вычислим, сколько процентов от максимального числа оборотов мы получим с нашими показателями, для этого найдем коэффициент заполнения D, выражаемый в процентах и вычисляемый по формуле: D=1/S, где S — полученная ранее скважность. Выполняем подсчет: D=1/2=0,5. Вычисляем проценты: 0,5*100=50%. Если в течение секунды на обмотку электродвигателя мы 10 раз подадим напряжение, которое будет длиться 0,05 секунды, то получим скорость вращения, соответствующую 6 Вольтам напряжения. В нашем случае периоды подачи и отсутствия напряжения равны, но если нужно получить повышенное количество оборотов ротора, длину импульса t нужно увеличивать. Например, необходимо получить 75% от максимальной скорости вращения вала, тогда длина импульса t должна быть равна: t=T-25%=0,1–25%=0,075 с, то есть 75% времени периода следования импульсов нужно подавать ток. Найдем скважность: S=0,1/0,075=1,33. Теперь вычислим коэффициент заполнения: D=1/1,33=0,75*100=75%. Это наглядный пример. В реальности после завершения подачи тока на щетки, вал электродвигателя продолжает двигаться по инерции, поэтому если угловая скорость ротора растет и не успевает уменьшиться в течение паузы, регулирование потеряет свою эффективность. Способы торможения двигателяЕсли используется мотор-редуктор, или электродвигатель с нагрузкой на вал, обеспечивающей быстрое торможение, то в принципиальной схеме ШИМ достаточно предусмотреть ключ и один диод. Во время работы ключ подает импульс на коллектор, отчего происходит разгон ротора, после прекращения подачи питания, вал затормаживается самостоятельно, благодаря статической нагрузке. При этом существует 2 основных режима работы:
На двигателях, которые работают без статической нагрузки, необходимо применять электрическое торможение. Для этого в принципиальную схему включают сопротивление. Во время паузы, ключ присоединяет якорь мотора к сопротивлению, для запуска процесса динамического торможения. Виды преобразователейШиротно-импульсные преобразователи, осуществляющие управление двигателем постоянного тока, состоят из силовой части, схемы управления и подразделяются на следующие виды:
Широтно-импульсный регулятор оборотов коллекторного двигателя позволяет гибко настраивать скорость вращения ротора с минимальным показателем рассеивания мощности. Так же по теме ШИМ регулирования предлагаем статью "Регулирование скорости вращения коллекторного двигателя постоянного тока" |
gearmotor.ru
Меня заинтересовали вопросы управления различными двигателями ( асинхронными, коллекторными, постоянного и переменного тока и т.д. ) и различные варианты этого управления.
Для начала я остановился на коллекторных двигателях от стиральных машин, потому что их очень много и они достаточно дёшевы. А также наличие целой серии специализированных микросхем предназначенных для этой цели.
Самая популярная из них – это микросхема TDA1085. Об этой микросхеме полно исчерпывающей информации – например здесь TDA1085. Если задать поиск “TDA1085” - то Google выдаст огромное количество информации и огромное количество практических схем. Самое подробное и полное описание регулятора на TDA1085 , о том как его изготовить и как настроить представил Александр Шенрок в своих видео.
На основе собранных данных я изготовил три разных платы на симисторах BTA41,
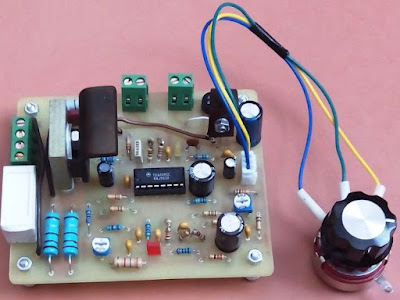
BTA24

и BTA16.

Все эти платы прошли испытания и вполне работоспособны. Свои принципиальные схемы я размещу в следующем сообщении. Купить микросхемы TDA1085 можно здесь. Купить симисторы BTA41 можно здесь.
Все нужные радиодетали можно приобрести здесьМожно скачать первые варианты самодельные - здесь ссылка на первые печатные платы, которые на фото - Первые печатки Там нет обозначений и подключение по 5 и 6 ноге надо привести в соответствие со схемами http://www.motor-r.info/p/blog-page_4.html Когда я начинал делать - схема была немного другой.
www.motor-r.info

Коллекторный электродвигатель постоянного тока довольно прост в вопросе функционирования и является достаточно универсальным в своем роде, однако, при возникновении необходимости регулировки скорости вращения вала могут возникнуть проблемы. Такие двигатели имеют три основных недостатка – довольно небольшой момент на низких скоростях вращения, высокий уровень помех и малый ресурс. Помимо скорости, есть и другие параметры требующие управления – плавный старт и остановка, реверс, работа с внешними сигналами (датчиками).
Регулировка скорости коллекторного двигателя постоянного тока
Самым распространенным решением данного вопроса является использование метода широтно-импульсной модуляции (ШИМ). Он заключается в подаче на двигатель однополярных прямоугольных импульсов. Постоянная составляющая, которая образуется в результате подачи таких сигналов, рассматривается двигателем как интегратор и соответственно, влияет на скорость. Популярность метода обусловлена достаточной простотой, тем фактом что при его использовании не обязательно «цеплять» большие радиаторы для отвода тепла, и достаточно высоким КПД.
Менее распространено изменение значения подаваемого напряжение для регулировки скорости электродвигателя. Да, этот способ наиболее логичен, однако он имеет ряд своих недостатков. Использование регулируемых стабилизаторов напряжения неизбежно влечет за собой применение радиатора для минимизирования рассеивания мощности. А согласно даже примитивным расчетам, радиатор потребуется на довольно большую рассеиваемую мощность, что является дополнительными затратами и усложнением схем.
Регулировка старта и остановки (плавный пуск и торможение двигателя)
Эта регулировка необходима для исключения негативных составляющих при возникновении ударных моментов при запуске, и, как следствие, продления срока службы электродвигателя (исключение его перегревания и, как следствие, нарушение функционирования). Для этого используется фазовый метод, который заключается в постепенном увеличении питающего напряжения до номинала. При помощи него плавно увеличивается ток в обмотках, что исключает возникновение резкого переходного процесса срезкой просадкой напряжения. Данный способ отличается своей дешевизной и надежностью.
Управление направлением вращения двигателя, реверса
Сам по себе, реверс — это изменение направления вращения без предварительной остановки двигателя, которое можно добиться несколькими путями. Одним из способов, является статический, а именно – изменение полярности на выходе преобразователя в обмотке якоря. Этот способ не всегда удобен, так как обуславливает наличие большой постоянной времени обмотки возбуждения. Векторное управление, происходит за счет применения датчика обратной связи. В двигателях постоянного тока реверсирование достигается двумя путями – изменением полярности на зажимах обмотки якоря, в результате чего наступает торможение благодаря противотоку, а затем пуск в обратную сторону – реверс. Либо используется изменение полярности напряжения на зажимах обмотки возбуждения – процесс и результат тот же что в первом случае.
Контроллер для управления коллекторным двигателем постоянного тока
Чтобы решить все задачи по управлению двигателями постоянного тока наиболее удачным решением является использование специализированного контроллера или микроконтроллера. Использование микроконтроллера — самый оптимальный вариант, в случае, если есть возможность самостоятельной доработки схемы управления. В случае же, когда требуется готовое решение для быстрого внедрения, лучше всего использовать готовый контроллер для управления двигателем. Готовый контроллер подразумевает регулирование скорости двигателя, выбор направления вращения вала или осуществление реверса. По заданным условиям реализуется плавный разгон и торможение. Наиболее востребованными опциями являются работа с внешними датчиками и потенциометрами, дистанционное управление, передача данных с использованием промышленных интерфейсов (RS-485, Etherned, Profibus и другие).
www.radioingener.ru
Двигатели постоянного тока и мотор-редукторы, созданные на их основе, нуждаются в надежной системе управления скоростью вращения вала. Простым и удобным методом решения проблемы является применение широтно-импульсной модуляции (ШИМ). Способ основан на преобразовании постоянного напряжения в импульсное. При этом управление частотой вращения осуществляют путем изменения длительности подающегося импульса.
Например, по такому же принципу используют ШИМ схему в осветительных приборах для регулировки яркости свечения светодиодных ламп. Так как у светодиода небольшое время затухания частота работы устройства регулирования имеет большое значение. Качественные приборы должны полностью исключать мерцание при пониженной яркости свечения.
Управление двигателями постоянного тока методом ШИМ стало возможным благодаря силе инерции. После прекращения подачи напряжения на обмотки вал электродвигателя останавливается не сразу, продолжая движение по инерции. Путем кратковременной подачи напряжения с определенным периодом можно добиться плавного регулирования скорости вращения вала. При этом главным регулирующим параметром является размер паузы между импульсами.
Этот метод управления двигателем постоянного тока позволяет плавно изменять скорость вращения вала в широких пределах. ШИМ делает возможным изменение параметров работы двигателя в автоматическом режиме в соответствии с установленными данными. Необходимую информацию регулятор оборотов коллекторного двигателя получает от пользователя или специального датчика, который определяет, температуру, скорость вращения или любой другой параметр. Например, в воздушных системах охлаждения регулятор оборотов изменяет скорость вращения вентилятора на основе данных, полученных от датчика температуры. Это позволяет автоматически замедлять скорость потока воздуха при низкой температуре и увеличивать при высокой.
Простую схему управления двигателем постоянного тока можно собирать из полевого транзистора. Он играет роль электронного ключа, который переключает схему питания двигателя после подачи напряжения на базу. Электронный ключ остается открытым на время, соответствующее длительности импульса.
ШИМ сигнал характеризуют коэффициентом заполнения, который равен обратной величие скважности. Коэффициент заполнения равен отношению продолжительности импульса к периоду его подачи. Скорость движения вала двигателя будет пропорциональна значению коэффициента заполнения. Поэтому, если частота ШИМ сигнала слишком низкая для обеспечения стабильной работы, то вал двигателя будет вращаться заметными рывками. Чтобы гарантировать плавное регулирование и стабильную работу частота должна превышать сотни герц.
Частота может варьироваться в широких пределах от нескольких десятков до нескольких сотен герц. Благодаря емкостной нагрузке происходит сглаживание импульсов. В итоге на двигатель подается «постоянное» напряжение средней величины в зависимости от параметров управляющей системы. Например, если двигатель получает питание от сети напряжением 10В, и к нему подключить регулятор с длительностью импульса равной половине периода подачи, то эффект будет таким же, как при подаче 5В на двигатель напрямую.
ШИМ является популярным методом регулирования аналоговым напряжением в различных схемах. При использовании этого способа регулирования пользователь может столкнуться с непредсказуемым поведением двигателя. Например, вал может начать вращение в обратную сторону. Это происходит при низких емкостных нагрузках. В коллекторных двигателях в процессе работы происходит постоянное переключение обмоток якоря. Когда подключают регулятор, начинает происходить отключение и включение питание с определенной частотой. Дополнительная коммутация в сочетании с коллекторной может привести к проблемам с эксплуатацией двигателя. Поэтому устройства управления с ШИМ регулированием двигателя должны быть тщательно продуманы и проработаны.
Также причиной нестабильной работы электродвигателя может стать факт влияния силы тока на скорость вращения ротора, которая находится в зависимости от уровня приложенного напряжения. Проблемы могут возникнуть при эксплуатации двигателей на малой скорости по отношению к номинальному значению.
Например, у пользователя есть двигатель, который при номинальном напряжение вращает ротор со скоростью 10об/сек. Чтобы понизить скорость до 1 об/сек недостаточно просто снизить напряжение до 1В. Подобрать подходящее значение подаваемого напряжения сложно и если пользователю и удастся, то при незначительном изменении условий эксплуатации скорость снова изменится.
Решением проблемы является применение системы автоматического регулирования или кратковременное включение электродвигателя на полную мощность. Движение ротора будет происходить рывками, но при правильно подобранной частоте и длительности подаваемых импульсов можно сделать вращение более стабильным. Так, добиваются устойчивого движения вала электродвигателя с любой скоростью, которая не будет меняться в зависимости от нагрузки.
Многие модели современных ПЛК контроллеров предоставляют возможность организации ШИМ. Но иногда доступных каналов оказывается недостаточно и приходится использовать программу обработки прерывай.
Алгоритм реализации ШИМ:
Длительность импульса легче отследить с определенной периодичностью или ступенями. Например, десять регулировочных ступеней соответствуют 10% от максимального значения. Прежде всего необходимо определиться с частотой импульсов и количеств ступеней регулирования. Далее, умножают полученные значения. Результат произведения даст необходимую частоту прерываний таймера.
При желании можно выбрать подходящую частоту таймера или количество ступеней регулирования и путем расчетов находят необходимую частоту импульсов.
Так же по теме регулирования скорости коллекторного двигателя предлагаем статью "Управление коллекторным двигателем постоянного тока методом ШИМ"
gearmotor.ru

1 г. назад
http://sxem.org/forum/skhemo-temy/325-tsifrovaya-skhema-regulirovki-moshchnosti-kollektornogo-dvigatelya-s-takhometrom.

1 г. назад
Электродвигатели нужны всем и мы постоянно ими пользуемся в этом видео мы рассмотрим подключение коллекто...

2 г. назад
Привет. Чтобы заказать плату переходите по ссылке http://elektroplata.ru/reguljator-oborotov-elektrodvigatelja-tda1085?tracking=1011 Вот ссылка...

3 г. назад
Управление двигателем от стиральной машины на TDA1085 Быстрое , качественное и дешёвое изготовление плат в...

2 г. назад
Управляем вращением двигателем постоянного тока в различных направления и с различной скоростью. Скетч:...

2 г. назад
Регулятор скорости коллекторного двигателя. Используется контроллер MEGA8 совместно с аппаратурой HPI-RACING TF1/RF6.

2 г. назад
В этом выпуске научимся управлять бесколлекторными (бесщёточными) моторчиками при помощи Ардуино (Arduino),...

2 г. назад
Как запустить бесколлекторный двигатель? Бк мотор. Brushless starting! Много РУ моделей, FPV, запчастей: https://goo.gl/c6e1Ys...

2 г. назад
Регулятор скорости для мелких бездатчиковых бесколлекторных двигателей (Sensorless BLDC). Идеальный привод для...
3 г. назад
Купить микроконтроллер можно тут: http://www.e-kip.ru/shop/products/index?searchword=ATmega8.
2 г. назад
Плата для Алексея. Белгородская обл., с.Хуторцы http://tda1085.mya5.ru Плата на заказ [email protected].

3 г. назад
В этом видео покажу, как регулировать скорость DC мотора при помощи широтно импульсной модуляции, изменяя...

4 мес. назад
Attiny13 имеет две ноги с аппаратным ШИМ, решил использовать их для управления коллекторным двигателем. При...

1 г. назад
Схема регулировки и стабилизации оборотов коллекторных двигателей.

2 г. назад
Опыты по регулятору оборотов с обратной связью. подробней в блоге: http://shenrok.blogspot.com/p/blog-page_37.html Ссылка на прош...

4 мес. назад
Покупал тут: http://ali.pub/267sgc С цифровым табло: http://ali.pub/25r5si Основа для циркулярки: http://ali.pub/28ehya Циркулярка+ремень+...

1 г. назад
Платы под заказ. Управление коллекторным двигателем на TDA1085 и симисторе BTA41. по возникшим вопросам обращай...
7 г. назад
Джереми рассказывает о подключении мотора через транзистор к Arduino. Затем о применении и программировании...
2 г. назад
Подробнее о схеме на сайте: http://forum.motorka.org/topic9394.html Блок управления со стабилизацией оборотов и мощности,...
inlove.kz