Если вы хотите почитать о реверсе тяги двигателя самолета, то я рекомендую обратить внимание на свежую статью на эту тему. Она написана 30.03.13 и располагается на этом сайте в той же рубрике под названием «Еще раз о реверсе тяги… Чуть подробнее… :-)», то есть здесь. А эта статья (где вы сейчас находитесь) на мой взгляд уже не отвечает взыскательным запросам, как собственно моим, так и моих читателей. На сайте, однако, она останется, так что, если хотите, можете обратить внимание и на нее… Разве что для сравнения :-)…

Работа реверса при посадке А-321.
Сегодня совсем небольшая статья о таком интересном устройстве, как реверс тяги двигателя самолета.
Проблема торможения самолета после посадки на пробеге была малозначимой наверное только на заре авиации, когда самолеты летали медленнее современных автомобилей и были значительно легче последних :-). Но в дальнейшем этот вопрос становился все более важным и для современной авиации с ее скоростями он достаточно серьезен.
Чем же можно затормозить самолет? Ну, во-первых, конечно тормозами, установленными на колесном шасси. Но дело в том, что если самолет имеет большую массу и садится с достаточно большой скоростью, то часто этих тормозов просто не хватает. Они бывают не в состоянии за короткий промежуток времени поглотить всю энергию движения многотонной махины. К тому же если условия контакта (трения) между шинами колес шасси и бетонной полосой не очень хорошие (например, если полоса мокрая во время дождя), то торможение будет еще хуже.
Однако, существуют еще два способа. Первый – это тормозной парашют. Система достаточно эффективная, но не всегда удобная в применении. Представьте себе какой нужен парашют, чтобы затормозить, например, огромный Боинг-747, и какая должна быть парашютная служба в большом аэропорту, где самолеты садятся, можно сказать, валом :-).

Работа реверса (створки) на аэробусе А-319 компании JeasyJet.
Второй способ в этом плане значительно более удобен. Это реверс тяги двигателя на самолете. Принципиально это достаточно простое устройство, которое создает обратную тягу, то есть направленную против движения самолета, и тем самым его тормозит.

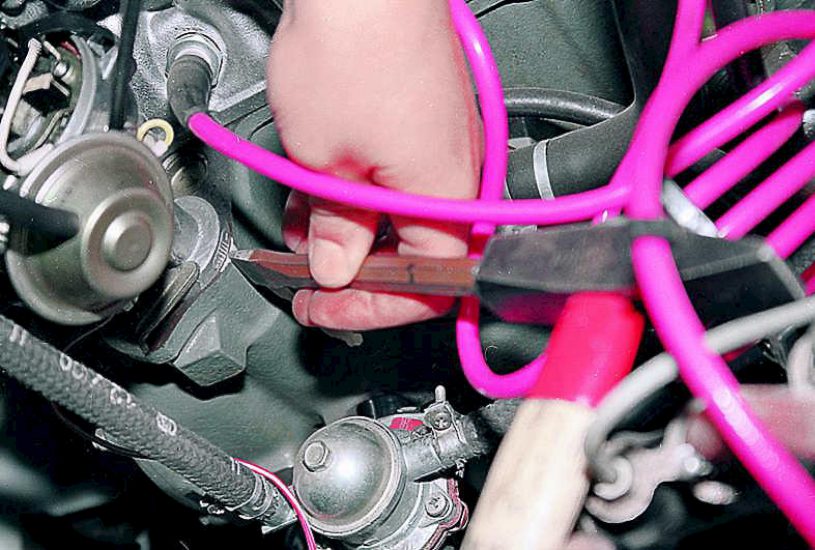
Устройство реверса на ТРД. Видны гидроцилиндры управления реверсивными створками
Реверс тяги могут создавать винтовые самолеты с винтом изменяемого шага (ВИШ). Это делается путем изменения угла установки лопастей винта в такое положение, когда винт начинает «тянуть» назад. А на реактивных двигателях это делается посредством изменения направления выходящей реактивной струи с помощью устройств реверса, чаще всего выполненных в виде створок, перенаправляющих реактивную струю. Так как нагрузки там многотонные, то створки эти управляются при помощи гидравлической системы.

Реверс на самолете Fokker F-100 компании KLM.
Основное применение реверса тяги – это торможение при пробеге. Но он может применяться и при экстренном торможении при необходимости прекращения взлета. Реже и не на всех самолетах этот режим может применяться при рулении на аэродроме для движения задним ходом, тогда отпадает необходимость в буксировщике. Очень характерен в этом плане шведский истребитель Saab-37 Viggen. Его эволюции можно посмотреть на ролике в конце статьи.

Истребитель Saab 37 Viggen.
Однако справедливости ради стоит сказать, что он чуть ли не единственный самолет, так легко разъезжающий задним ходом :-). И вообще реверс тяги на реактивных двигателях редко применяется на самолетах малого размера (истребителях). В основном он получил распространение на лайнерах коммерческой и гражданской авиации и на транспотртных самолетах.
Стоит сказать, что на некоторых самолетах предусмотрено применение реверса тяги в полете (пример тому пассажирский самолет ATR-72). Обычно это возможно для экстренного снижения. Однако на такого рода режимы наложены ограничения и в обычной летной эксплуатации они практически не применяются.

Самолет ATR-72.
Реверс тяги самолета имеет, однако, при всех своих достоинствах и недостатки. Первое – это вес самого устройства. Для авиации вес играет большую роль и часто из-за него (а также из-за габаритов) устройство реверса не применяется на военных истребителях. А второе – это то, что перенаправленная реактивная струя при попадании на взлетную полосу и окружающий грунт способна поднимать в воздух пыль и мусор, который может попасть в двигатель и повредить лопатки компрессора. Такая опасность более вероятна при малых скоростях движения самолета (примерно до 140 км/ч), при больших скоростях мусор просто не успевает долететь до воздухозаборника. Бороться с этим довольно сложно. Чистота взлетно-посадочной полосы (ВПП) и рулежных дорожек – это вообще непроходящая проблема аэродромов, и о ней я расскажу в одной из следующих статей.

Самолет ЯК-42
Стоит сказать, что существуют самолеты, которые не нуждаются в устройствах реверса тяги реактивных двигателей. Это такие, как, например, российский ЯК-42 и английский BAe 146-200. Оба имеют развитую механизацию крыла, значительно улучшающую их взлетно-посадочные характеристики. Особенно показателен в этом плане второй самолет. Он кроме механизации имеет хвостовые воздушные тормоза (щитки), позволяющие ему эффективно гасить скорость на снижении и после посадки на пробеге (вкупе с использованием интерцепторов). Надобность в реверсе отпадает, что делает этот самолет удобным к использованию в аэропортах, находящихся в черте города и поэтому чувствительных к шуму, а также имеющих крутую схему захода на посадку (например, Лондонский городской аэропорт).

Самолет BAe 146-200. Хорошо видны раскрытые тормозные щитки в хвосте.
Однако, такого рода самолетов все же не так много, а реверс тяги уже достаточно хорошо проработанная система, и без нее сегодня немыслима работа аэропортов.
В заключение предлагаю вам посмотреть ролики, в которых хорошо видна работа механизмов реверса. Видно, как реверсированная струя поднимает с бетонки воду. Ну и, конечно, «задний ход» SAABа :-). Смотреть лучше в полноэкранном варианте :-)..
Фотографии кликабельны.
No related posts.
avia-simply.ru
Изобретение относится к испытательной технике и может быть использовано для определения эффективной тяги двигателей самолета. Способ основан на измерении скоростного напора воздушного потока, включает в себя измерение угла атаки самолета и перегрузку вдоль продольной оси самолета. На основании полученных данных, учитывая константы, характеризующие конструкцию и аэродинамику испытуемого самолета, такие как эквивалентная площадь крыла самолета, угол отклонения оси двигателя от продольной оси самолета, выходной импульс двигателя, ускорение свободного падения, масса самолета, определяют эффективную тягу двигателя методом наименьших квадратов, причем для определения эффективной тяги двигателей выполняют последовательные маневры пикирования и кабрирования с постоянной тягой, во всем эксплуатационном диапазоне высот и скоростей полета. Технический результат заключается в повышении точности измерения тяги.
Изобретение относится к испытательной технике и может быть использовано для определения эффективной тяги двигателей самолета, т.е. равнодействующей сил давления и трения, приложенных ко всем поверхностям силовой установки как со стороны газового потока, протекающего внутри двигателя, так и со стороны потока воздуха, обтекающего силовую установку снаружи. Значение эффективной тяги представляет собой долю тяги изолированного двигателя, непосредственно используемую для движения ЛА. Актуальной задачей является повышение точности, достоверности и оперативности определения эффективной тяги двигателей самолетов для различных режимов полета, сокращение сроков испытаний и их стоимости.
Известен газодинамический способ определения тяги газотурбинных двигателей (ГТД), включающий измерение параметров газовой струи, площади сопла и вычисление по ним тяги двигателя. Различные модификации способа представлены в, частности, в патентах США №2524749, МПК G01L 5/133, опубликованном 10.10.1950 г., и №2981098, МПК G01L 5/13, опубликованном 25.04.1961 г.
Известны также аэродинамические методы измерения тяги реактивных двигателей, использующие датчики динамического напора выхлопной струи, позволяющие непосредственно измерять импульс реактивной струи или полный импульс в точке сечения реактивной струи. Такой способ описан, в частности, в патенте США №3543574, МПК G01L 5/13, опубликованном 01.12.1970 г., выбранном нами в качестве прототипа.
Эти способы требуют препарирования и усложнения конструкции двигателя и обладают значительной погрешностью в определении тяги. Общим недостатком указанных способов является то, что вводимые в реактивную струю зонды, датчики не дают однозначных результатов в околозвуковых и трансзвуковых диапазонах скоростей реактивной струи в связи с нелинейностью коэффициентов сопротивления, что приводит к снижению точности определения тяги.
Целью изобретения является создание способа определения эффективной тяги двигателей самолета на различных режимах эксплуатации, позволяющего повысить точность измерения тяги без усложнения конструкции и процесса эксплуатации двигателей, при уменьшении объема трудозатрат.
Поставленная цель достигается за счет того, что согласно заявленному способу определения тяги двигателей самолета, основанному на измерении скоростного напора воздушного потока, дополнительно измеряют угол атаки самолета, перегрузку вдоль продольной оси самолета и на основании полученных данных, учитывая константы, характеризующие конструкцию и аэродинамику испытуемого самолета, такие как эквивалентная площадь крыла самолета S, угол отклонения оси двигателя от продольной оси самолета φдв, выходной импульс двигателя Ρвых0, ускорение свободного падения g, масса самолета m, определяют эффективную тягу двигателя методом наименьших квадратов, причем для определения эффективной тяги двигателя выполняют последовательные маневры пикирования и кабрирования с постоянной тягой во всем эксплуатационном диапазоне высот и скоростей полета.
Предлагаемый способ предназначен для определения эффективной тяги двигателей по данным летных испытаний. Главная особенность предлагаемого подхода заключается в том, что для получения оценок тяги и сопротивления используются только измерения таких основных полетных параметров, как скоростной напор набегающего потока воздуха, продольная перегрузка и угол атаки самолета. Измерения параметров двигателя (давление, температура в заданных сечениях) не требуются, газодинамическая модель двигателя в алгоритме не используется.
Искомая величина эффективной тяги двигателей получается в результате решения задачи параметрической идентификации непосредственно в полете. Наблюдаемость обеспечивается за счет выполнения специального тестового маневра, обеспечивающего малые приращения скорости полета при постоянном режиме работы двигателя.
Суть работы способа излагается ниже.
Рассмотрим следующую модель объекта. Сила аэродинамического сопротивления направлена вдоль оси Охе
Хе=qSCxe,
где  - скоростной напор, Па;
- скоростной напор, Па;
S - эквивалентная площадь крыла, м2;
ρH - плотность воздуха на высоте полета H, кг/м3;
Vист - истинная воздушная скорость.
Аэродинамические коэффициенты в связанной системе координат определяются выражением
 ,
,
где α - угол атаки, градус.
Значения аэродинамических коэффициентов и геометрических параметров зависят от типа ЛА.
Учитывая, что входной импульс Рвх направлен вдоль связанной оси, а выходной Рвых - вдоль оси двигателя, которая отклонена относительно связанной оси на угол установки двигателя φдв, проекция аэродинамических сил, входного и выходного импульсов на продольную ось определяется выражением
XΣe=qScxe-Рвх+Рвыхcos(φдв+α)
Проекция перегрузки на ось X
 ,
,
Окончательные выражения для проекции перегрузки на продольную ось получим, подставляя разложения аэродинамических коэффициентов:

Учитывая, что cos(φдв+α)=cosφдвcosα-sinφдв-sinα и раскладывая cosα и sinα в ряд относительно α0=0, получим  ; sinα≈α. Тогда для малых углов атаки
; sinα≈α. Тогда для малых углов атаки

Последние два слагаемых целесообразно учесть в явном виде, используя априорную информацию о Рвх. Объединим составляющие тяги
Рэф=-Рвх+Рвыхcosφдв.
Тогда выражение (1) примет следующий вид:

где 
слагаемое, зависящее от априорного значения выходного импульса Рвых0.
Расчетами установлено, что если погрешность априорного значения не превышает 10%, ее влияние на погрешность остальных параметров не превышает 0,25%.
Вектор определяемых параметров содержит четыре параметра
 .
.
Идентификация выполняется по методу наименьших квадратов (МНК) на основе уравнения (2).
Учитывая, что бортовые измерения выполняются в дискретные моменты времени,

где N - число измерений на участке идентификации.
Для нахождения оценок по МНК формируем вектор Y размерности N и матрицу X размерности N×N:


Тогда вектор определяемых параметров находим в соответствии с выражением

Анализ выражений (4)-(7) показывает, что для обеспечения наблюдаемости необходимо изменять скорость полета, однако изменения относительно установившегося значения должны быть малы (точное значение зависит от типа двигателя и режима полета), чтобы выполнялось условие постоянства силы тяги двигателей на интервале обработки. Скорость изменяется при постоянном режиме работы двигателей за счет последовательного выполнения маневров пикирования и кабрирования с малыми углами наклона траектории. Изменения угла атаки при переходных процессах достаточны для обеспечения наблюдаемости всей системы.
В соответствии с общим подходом к оцениванию характеристик самолетов в летных испытаниях указанный маневр необходимо выполнить во всем эксплуатационном диапазоне высот и скоростей полета.
На высоте Н=3000 м и скорости полета, соответствующей М=0,4 (Vпр=410 км/час), необходимо сбалансировать самолет в прямолинейном горизонтальном полете (ПГП) с постоянной скоростью, запомнить при этом угол атаки α0. Выполнить движение РУС по тангажу "от себя" и "на себя" длительностью 2…2,5 с так, чтобы приращения угла атаки составили ±(1…2) градуса. Восстановить ПГП на той же высоте и с тем же числом М и углом атаки. Не изменяя режим работы двигателей, перевести самолет в пикирование с малым приращением угла тангажа так, чтобы приборная скорость полета постепенно увеличилась на 10 км/час до 420 км/час (число M увеличилось на 0,01 до М=0,41). Затем перевести самолет в режим прямолинейного набора высоты так, чтобы скорость с тем же темпом уменьшилась на 10 км/час от исходного значения, то есть до 400 км/час (число M уменьшилось на 0,01 от исходного до М=0,39). Далее снова перевести самолет в пикирование и увеличить скорость с тем же темпом до исходного значения 410 км/час (М=0,4). Восстановить ПГП с М=0,4 (Vпр=410 км/час) на исходной высоте в пределах Н0±250 м. Выполнить движение РУС по тангажу "от себя" и "на себя" длительностью 2…2,5 с так, чтобы приращения угла атаки составили ±(1…2) градуса.
При выполнении режима угол атаки выдерживать в диапазоне α0±(1…2)°, при переводах в пикирование и кабрирование допускается превышение этого ограничения.
Таким образом, требуется при постоянном режиме работы двигателя выполнить плавное колебание по приборной скорости ±10 км/час (dM=±0,01) за счет малых изменений угла наклона траектории. Повторить режим.
Выполнить аналогичный режим, создавая приращения по приборной скорости ±15 км/час (dM=±0,015). Повторить режим.
Техническим результатом является возможность определения эффективной тяги двигателей самолета, используя только измеренные значения параметров полета самолета и априорные значения констант, характеризующих параметры летательного аппарата. Заявляемый способ может быть использован на всех типах ЛА, независимо от типа используемого двигателя. Значения констант определяются при продувках планера самолета в аэродинамических трубах и путем взвешиваний и юстировки при изготовлении самолета.
Исследования методом математического моделирования показали работоспособность и высокую точность предлагаемого способа.
Способ определения тяги двигателей самолета, основанный на измерении скоростного напора воздушного потока, отличающийся тем, что дополнительно измеряют угол атаки самолета, перегрузку вдоль продольной оси самолета и на основании полученных данных, учитывая константы, характеризующие конструкцию и аэродинамику испытуемого самолета, такие как эквивалентная площадь крыла самолета S, угол отклонения оси двигателя от продольной оси самолета φдв, выходной импульс двигателя Рвых0, ускорение свободного падения g, масса самолета m, определяют эффективную тягу двигателя методом наименьших квадратов, причем для определения эффективной тяги двигателя выполняют последовательные маневры пикирования и кабрирования с постоянной тягой во всем эксплуатационном диапазоне высот и скоростей полета.
www.findpatent.ru
Силовая установка предназначена для создания силы тяги, необходимой для преодоления лобового сопротивления и обеспечения поступательного движения самолета.
Сила тяги создается установкой, состоящей из двигателя, движителя (винта, например) и систем, обеспечивающих работу двигательной установки (топливная система, система смазки, охлаждения и т.д.).
В настоящее время в транспортной и военной авиации широкое распространение получили турбореактивные и турбовинтовые двигатели. В спортивной, сельскохозяйственной и различного назначения вспомогательной авиации пока еще применяются силовые установки с поршневыми авиационными двигателями внутреннего сгорания.
На самолетах Як-52 и Як-55 силовая установка состоит из поршневого двигателя М-14П и воздушного винта изменяемого шага В530ТА-Д35. Двигатель М-14П преобразует тепловую энергию сгорающего топлива в энергию вращения воздушного винта.
Воздушный винт - лопастный агрегат, вращаемый валом двигателя, создающий тягу в воздухе, необходимую для движения самолета.
Работа воздушного винта основана на тех же принципах, что и крыло самолета.
Реактивный двигатель — двигатель создающий необходимую для движения силу тяги посредством преобразования потенциальной энергии топлива в кинетическую энергию реактивной струи рабочего тела.
Рабочее тело с большой скоростью истекает из двигателя, и, в соответствии с законом сохранения импульса, образуется реактивная сила, толкающая двигатель в противоположном направлении. Для разгона рабочего тела может использоваться как расширение газа, нагретого тем или иным способом до высокой температуры (т.н. тепловые реактивные двигатели), так и другие физические принципы, например, ускорение заряженных частиц в электростатическом поле (См. ионный двигатель).
Реактивный двигатель сочетает в себе собственно двигатель с движителем, то есть он создаёт тяговое усилие только за счёт взаимодействия с рабочим телом, без опоры или контакта с другими телами. По этой причине чаще всего он используется для приведения в движение самолётов, ракет и космических аппаратов.
Ракетный двигатель — реактивный двигатель, источник энергии и рабочее тело которого находится в самом средстве передвижения. Ракетный двигатель — единственный практически освоенный для вывода полезной нагрузки на орбиту искусственного спутника Земли и применения в условиях безвоздушного космического пространства тип двигателя. Другие типы двигателей, пригодные для применения в космосе (например, солнечный парус, космический лифт) пока еще не вышли из стадии теоретической и/или экспериментальной отработки.
Сила тяги в ракетном двигателе возникает в результате преобразования исходной энергии в кинетическую энергию реактивной струи рабочего тела. В зависимости от вида энергии, преобразующейся в кинетическую энергию реактивной струи, различают химические ракетные двигатели, ядерные ракетные двигатели и электрические ракетные двигатели.
Характеристикой эффективности ракетного двигателя является удельный импульс (в двигателестроении применяют несколько другую характеристику — удельная тяга) — отношение количества движения, получаемого ракетным двигателем, к массовому расходу рабочего тела. Удельный импульс имеет размерность м/c, то есть размерность скорости. Для идеального ракетного двигателя удельный импульс численно равен скорости истечения рабочего тела из сопла.
Наиболее распространены химические ракетные двигатели, в которых, в результате экзотермической химической реакции горючего и окислителя (вместе именуемые топливом), продукты сгорания нагреваются в камере сгорания до высоких температур, расширяясь, разгоняются в сверхзвуковом сопле и истекают из двигателя. Топливо химического ракетного двигателя является источником как тепловой энергии, так и газообразного рабочего тела, при расширении которого его внутренняя энергия преобразуется в кинетическую энергию реактивной струи.
В турбореактивном двигателе (ТРД, англ. turbojet engine) сжатие рабочего тела на входе в камеру сгорания и высокое значение расхода воздуха через двигатель достигается за счёт совместного действия встречного потока воздуха и компрессора, размещённого в тракте ТРД сразу после входного устройства, перед камерой сгорания. Компрессор приводится в движение турбиной, смонтированной на одном валу с ним, и работающей на рабочем теле, нагретом в камере сгорания, из которого образуется реактивная струя. В компрессоре осуществляется рост полного давления воздуха за счёт совершаемой компрессором механической работы. Камера сгорания большинства ТРД имеет кольцевую форму.
Из камеры сгорания нагретое рабочее тело поступает на турбину, расширяется, приводя её в движение и отдавая ей часть своей энергии, а после неё расширяется в сопле и истекает из него, создавая реактивную тягу. Благодаря компрессору ТРД может стартовать с места и работать при низких скоростях полёта, что для двигателя самолёта является необходимым условием, при этом давление в тракте двигателя и расход воздуха обеспечиваются только за счёт компрессора.
Диапазон скоростей, в котором ТРД эффективен, смещён в сторону меньших значений, по сравнению с ПВРД. Агрегат турбина-компрессор, позволяющий создавать большой расход и высокую степень сжатия рабочего тела в области низких и средних скоростей полёта, является препятствием на пути повышения эффективности двигателя в зоне высоких скоростей.
Максимальная скорость истечения реактивной струи у ТРД меньше, чем у ПВРД, что ограничивает сверху диапазон скоростей, на которых ТРД эффективен, значениями 2,5—3 Маха.
poznayka.org
Изобретение относится к испытательной технике и может быть использовано для измерения эффективной тяги двигателей самолета. Устройство содержит измеритель скоростного напора воздушного потока, датчик угла атаки, датчик перегрузки, задатчик размера матриц, три блока формирования матриц, блок вычитания матриц, блок транспонирования матрицы, блок обращения матрицы, три блока умножения матриц, соединенных между собой определенным образом. Технический результат заключается в повышении точности измерений, упрощении конструкции. 1 ил.
Изобретение относится к испытательной технике и может быть использовано для измерения эффективной тяги двигателей самолета, которая является равнодействующей сил давления и трения, приложенных ко всем поверхностям силовой установки как со стороны газового потока, протекающего внутри двигателя, так и со стороны потока воздуха, обтекающего силовую установку снаружи.
Известны способ измерения скоростного напора газового потока и устройство для измерения тяги реактивного двигателя, описанные в патенте RU 2100788, МПК G01L 5/13, G01M 15/00, опубликованном 27.12.1997 г., принятом нами за прототип.
Описанное в патенте устройство предназначено для измерения тяги реактивного двигателя путем измерения скоростного напора газового потока, который измеряют двумя зондами с различными коэффициентами аэродинамического сопротивления, размещенными в газовом потоке вблизи измеряемой зоны, и определяют параметр, характеризующий отношение измеренных зондами усилий, по которому с учетом числа Маха потока или разницы коэффициентов аэродинамического сопротивления зондов определяют скоростной напор газового потока. Каждый из зондов может быть выполнен в виде жестко закрепленного на двигателе стержня, на закрепленном конце которого размещено силоизмерительное устройство, выполненное в виде калиброванной балки с тензорезисторами.
Однако известные способ и устройство обладают рядом недостатков. Так, коэффициент сопротивления стержня на околозвуковых и трансзвуковых скоростях потока является нелинейным, неоднозначным, зависящим от числа М, что снижает точность измерения импульса тяги. Устройство является сложным, громоздким, приводит к увеличению габаритов двигателя и изменению его конструкции.
Целью изобретения является создание устройства определения эффективной тяги двигателей самолета на различных режимах эксплуатации, позволяющего повысить точность измерения тяги без усложнения конструкции и процесса эксплуатации двигателя, при уменьшении объема трудозатрат.
Поставленная цель достигается за счет того, что в устройство определения тяги двигателей самолета, содержащее измеритель скоростного напора воздушного потока, дополнительно введены датчик угла атаки, датчик перегрузки, задатчик размерности матрицы, три блока формирования матриц, блок вычитания матриц, блок транспонирования матриц, последовательно соединенные первый блок умножения матриц, блок обращения матрицы, второй блок умножения матриц и третий блок умножения матриц, причем выход измерителя скоростного напора воздушного потока подключен к первому входу первого блока формирования матрицы, первый выход которого подключен к первому входу первого блока умножения матриц, второй выход подключен к входу блока транспонирования матриц, первый и второй выходы которого подключены соответственно ко второму входу первого блока умножения матриц и к входу второго блока умножения матриц, выход датчика угла атаки подключен ко второму и первому входам первого и второго блоков формирования матриц соответственно, выход датчика перегрузки подключен к первому входу третьего блока формирования матрицы, при этом третьи и четвертые входы блоков формирования матриц являются входами для сигналов, соответствующих константам, характеризующим конструкцию и аэродинамику самолета, выход задатчика размерности матрицы подключен к пятому входу первого блока формирования матрицы и ко вторым входам второго и третьего блоков формирования матрицы, выходы которых подключены к соответствующим входам блока вычитания матриц, выход которого подключен ко второму входу третьего блока умножения, выход которого является выходом устройства.
Сущность изобретения поясняется чертежом, на котором представлена структурная схема заявляемого устройства.
Предлагаемое устройство определения эффективной тяги двигателя самолета содержит измеритель 1 скоростного напора воздушного потока, датчик 2 угла атаки, датчик 3 перегрузки, задатчик 4 размера матриц, первый, второй и третий блоки 5, 6 и 7 формирования матриц X, А и В соответственно, блок 8 вычитания матриц, блок 9 транспонирования матрицы, последовательно соединенные первый блок 10 умножения матриц, блок 11 обращения матрицы, второй и третий блоки умножения матриц 12 и 13 соответственно.
Искомое значение эффективной тяги двигателя получается в результате решения задачи параметрической идентификации. Наблюдаемость достигается за счет выполнения специального тестового маневра, обеспечивающего малые приращения скорости полета при постоянном режиме работы двигателя. При этом сила аэродинамического сопротивления пропорциональна скоростному напору, то есть квадрату скорости, тяга двигателя принимается постоянной (в силу малой величины приращений скорости). Это позволяет получить установившееся значение эффективной тяги, поскольку квадратичная функция и константа линейно независимы.
Главная особенность предлагаемого подхода заключается в том, что для получения оценок тяги и сопротивления используются только измерения основных полетных параметров, таких как продольная перегрузка, воздушная скорость, высота и угол атаки.
Рассмотрим следующую модель объекта. Сила аэродинамического сопротивления направлена вдоль оси Oxe
где q=ρHVист22 - скоростной напор, Па;
S - эквивалентная площадь крыла, м2;
ρH - плотность воздуха на высоте полета H, кг/м3;
Vист - истинная воздушная скорость.
Аэродинамические коэффициенты в связанной системе координат определяются выражением
где α - угол атаки, градус.
Значения аэродинамических коэффициентов и геометрических параметров зависят от типа самолета.
Учтем, что входной импульс Рвх направлен вдоль связанной оси, а выходной Рвых - вдоль оси двигателя, которая отклонена относительно связанной оси на угол установки двигателя φдв.
Проекция аэродинамических сил входного и выходного импульсов на продольную ось определяется выражением
Проекция перегрузки на ось X
Окончательные выражения для проекции перегрузки на продольную ось:
Учитывая, что cos(φдв+α)=cosφдвcosα-sinφдвsinα и раскладывая cosα и sinα в ряд относительно α0=0, получим cosα≈1−12α2 ; sinα≈ α. Тогда для малых углов атаки
Последние два слагаемых целесообразно учесть в явном виде, используя априорную информацию о Рвых. Объединим составляющие тяги
Тогда выражение (1) принимает вид:
слагаемое, зависящее от априорного значения выходного импульса Pвых0.
Расчетами установлено, что если погрешность априорного значения параметра не превышает 10%, ее влияние на погрешность остальных параметров не превышает 0,25%.
Вектор определяемых параметров
Идентификация выполняется по методу наименьших квадратов (МНК) на основе уравнения (2).
С учетом того, что бортовые измерения выполняются в дискретные моменты времени
где N - число измерений на участке идентификации.
Для нахождения оценок согласно МНК формируются вектор Y размерности N и матрица X размерности N×N:
Тогда вектор определяемых параметров находится следующим выражением
Анализ выражений (4)-(7) показывает, что для обеспечения наблюдаемости необходимо изменять скорость полета, однако изменения относительно установившегося значения должны быть малы (точное значение зависит от типа двигателя и режима полета), чтобы выполнялось условие постоянства силы тяги двигателей на интервале обработки. Скорость изменяется при постоянном режиме работы двигателей за счет последовательного выполнения пикирований и кабрирований с малыми углами наклона траектории. Изменения угла атаки при переходных процессах достаточны для обеспечения наблюдаемости всей системы, однако целесообразно включить дополнительно тестовые движения ручкой управления самолетом (РУС) в канале тангажа.
В соответствии с общим подходом к оцениванию характеристик самолетов в летных испытаниях указанный маневр необходимо выполнить во всем эксплуатационном диапазоне высот и скоростей полета.
На высоте Н=3000 м и скорости полета, соответствующей М=0,4 (Vпр=410 км/ч), осуществляют балансирование самолета в прямолинейном горизонтальном полете (ПГП) с постоянной скоростью, запоминают при этом угол атаки α0. Выполнить движение РУС по тангажу "от себя" и "на себя" длительностью 2…2,5 с так, чтобы приращения угла атаки составили ±(1…2) градуса. Восстановить ПГП на той же высоте и с тем же числом М и углом атаки. Не изменяя режим работы двигателей, перевести самолет в пикирование с малым приращением угла тангажа так, чтобы приборная скорость полета постепенно увеличилась на 10 км/ч до 420 км/ч (число М увеличилось на 0,01 до М=0,41). Затем перевести самолет в режиме прямолинейного набора высоты так, чтобы скорость с тем же темпом уменьшилась на 10 км/ч от исходного значения, то есть до 400 км/ч (число М уменьшилось на 0,01 от исходного до М=0,39). Далее снова перевести самолет в пикирование и увеличить скорость с тем же темпом до исходного значения 410 км/ч (М=0,4). Восстановить ПГП с М=0,4 (Vпр=410 км/ч) на исходной высоте в пределах Н0±250 м. Выполнить движение РУС по тангажу "от себя" и "на себя" длительностью 2…2,5 с так, чтобы приращения угла атаки составили ±(1…2) градуса.
При выполнении режима угол атаки выдерживать в диапазоне α0±(1…2)° при переводах в пикирование и кабрирование допускается превышение этого ограничения.
Таким образом, требуется при постоянном режиме работы двигателя выполнить плавное колебание по приборной скорости ±10 км/ч (dM=±0,01) за счет малых изменений угла наклона траектории. Повторить режим.
Выполнить аналогичный режим, создавая приращения по приборной скорости±15 км/час (dM=±0, 015). Повторить режим.
Устройство определения эффективной тяги двигателей работает следующим образом: по измеренным сигналам датчика 2 угла атаки, используя сигнал с задатчика 4 размера матрицы и константы φ и Рвых0 в блоке 6 формирования матрицы, формируется матрица А, элементы матрицы определяются согласно выражению (3).
Матрица В формируется в блоке 7 формирования матрицы по измеренным сигналам датчика 3 перегрузки, используя сигналы задатчика 4 размера матрицы, констант m и g, элементы которой определяются левой частью выражения (2). В блоке 8 вычитания матриц определяется разность матриц А и В.
Полученная в результате матрица Y является наблюдением для определения оценки эффективной тяги согласно выражению (5).
Матрица X формируется в блоке 5 формирования матрицы по измеренным сигналам датчика 2 угла атаки, используя константы S и "1", сигнал измерителя 1 скоростного напора воздушного потока q(t) и сигнал задатчика 4 размера матрицы согласно выражению (6). В первом блоке 10 умножения матриц, матрица X умножается на свое же значение, транспонированное в блоке 9 транспонирования матрицы. Полученная матрица (ХТХ) в блоке 11 обращения матрицы обращается в (ХТХ)-1 и во втором блоке 12 умножения матриц умножается на транспонированную матрицу ХT. Полученная матрица в третьем блоке 13 умножения матриц умножается на матрицу Y с выхода блока 8 вычитания матриц, согласно выражению (7).
Таким образом, на выходе устройства получаем значения вектора а, который содержит искомую величину Рэф.
Техническим результатом является возможность определения силы тяги реактивного двигателя самолетов путем использования измеренных значений параметров полета самолета и априорных значений констант, характеризующих параметры летательного аппарата, таких как эквивалентная площадь крыла самолета S, угол отклонения оси двигателя от продольной оси самолета φдв, выходной импульс двигателя Рвых0, ускорение свободного падения g, массы самолета m. Значения констант определяются при продувках полномасштабной модели воздушного судна в аэродинамических трубах и путем взвешиваний и юстировки при изготовлении самолета.
Заявляемое устройство является простым в реализации и может быть использовано на всех типах самолетов, независимо от используемого двигателя. В качестве датчиков перегрузки выбираются имеющиеся на борту акселерометры БИНС, при этом элементы операций с матрицами могут быть реализованы на стандартных элементах вычислительной техники.
Устройство определения тяги двигателей самолета, содержащее измеритель скоростного напора воздушного потока, отличающееся тем, что в него дополнительно введены датчик угла атаки, датчик перегрузки, задатчик размерности матрицы, три блока формирования матриц, блок вычитания матриц, блок транспонирования матриц, последовательно соединенные первый блок умножения матриц, блок обращения матрицы, второй блок умножения матриц и третий блок умножения матриц, причем выход измерителя скоростного напора воздушного потока подключен к первому входу первого блока формирования матрицы, первый выход которого подключен к первому входу первого блока умножения матриц, второй выход подключен к входу блока транспонирования матриц, первый и второй выходы которого подключены соответственно ко второму входу первого блока умножения матриц и к входу второго блока умножения матриц, выход датчика угла атаки подключен ко второму и первому входам первого и второго блоков формирования матриц соответственно, выход датчика перегрузки подключен к первому входу третьего блока формирования матрицы, при этом третьи и четвертые входы блоков формирования матриц являются входами для сигналов, соответствующих константам, характеризующим конструкцию и аэродинамику самолета, выход задатчика размерности матрицы подключен к пятому входу первого блока формирования матрицы и ко вторым входам второго и третьего блоков формирования матрицы, выходы которых подключены к соответствующим входам блока вычитания матриц, выход которого подключен ко второму входу третьего блока умножения, выход которого является выходом устройства.
www.findpatent.ru
Тяга – сила, выработанная двигателем. Она толкает самолет через воздушный поток. Единственное, что противостоит тяге – лобовое сопротивление. В прямолинейном горизонтально установившемся полете они относительно равны. В случае если летчик увеличивает тягу методом добавления оборотов двигателя и сохраняет постоянную высоту, тяга начинает превосходить сопротивление воздуха. Летательный аппарат (ЛА) наряду с этим ускоряется. Весьма скоро сопротивление возрастает и опять уравнивает тягу.
ЛА стабилизируется на постоянной высокой скорости. Тяга – один из самых ответственных факторов для определения скороподъемности самолета, в частности как скоро ЛА может подняться на определенную высоту. Вертикальная скорость зависит не от подъемной силы, а от запаса тяги, которым владеет самолет.
Тяга реактивного двигателя самолета
Сила тяги двигателя, либо его движущая сила, равноценна всем силам давления воздуха на внутреннюю поверхность силовой установки. Тяга некоторых видов реактивных двигателей зависит от высоты и скорости полета. Для вычисления силы тяги реактивного двигателя довольно часто приходится определять тягу на конкретной высоте, у почвы, на взлете и на протяжении какой-либо скорости.
Для ЖРД сила тяги равноценна произведению массы исходящих газов на скорость, с которой они вылетают из сопла двигателя.
")
Для ВРД (воздушно-реактивный двигатель) сила тяги измеряется как следствие массы газов на разность скоростей, в частности скорости воздушной струи, выходящей из сопла двигателя, и скорости поступающего воздуха в двигатель. Несложнее говоря, эта скорость уравнивается к скорости полета самолета с реактивным двигателем. Тяга ВРД в большинстве случаев измеряется в тоннах либо килограммах. Серьёзным качественным показателем ВРД есть его удельная тяга.
Для турбореактивного двигателя – тяга, отнесенная к конкретной единице веса воздуха, что проходит через двигатель в секунду. Данный показатель разрешает осознать, как высока эффективность эксплуатации воздуха в двигателе для образования тяги. Удельная тяга измеряется в килограммах тяги на 1 кг воздуха, расходуемого за секунду.
В некоторых случаях используется второй показатель, что кроме этого именуется удельной тягой, показывающей отношение количества горючего, которое расходуется, к силе тяги за секунду. Конечно, что чем выше показатель удельной тяги ВРД, тем меньше размеры и поперечный вес самого двигателя.
Показатель полетной либо тяговой мощности – это сила, которая задействует реактивный двигатель при конкретной скорости полета. В большинстве случаев, измеряется в лошадиных силах. Величина лобовой тяги говорит о степени конструктивного оптимума реактивного двигателя.
Лобовая тяга – это отношение громаднейшего показателя площади поперечного сечения к тяге. Лобовая тяга равна тяге, в кг поделенной на площадь в метрах квадратных.
Во всемирной авиации самый ценится тот двигатель, что владеет высокой лобовой тягой.
Чем идеальнее ВРД в конструктивном отношении, тем меньший показатель его удельного веса, в частности неспециализированный вес двигателя вместе с обслуживающими агрегатами и приборами, поделенный на величину собственной тяги.
Реактивные двигатели, как и тепловые по большому счету, отличаются друг от друга не только по мощности, весу, другим показателям и тяге. При оценивании ВРД огромную роль играются параметры, каковые зависят от собственной экономичности, в частности от КПД (коэффициент нужного действия). Среди данных показателей главным считается удаленный расход горючего на конкретную единицу тяги.
Он выражается в килограммах горючего, которое расходуется за час на образование одного килограмма тяги.
stroimsamolet.ru
Использование: при измерении тяги авиадвигателей в составе самолета в эксплуатации, в аэродромных условиях. Сущность изобретения: самолет устанавливают основными колесами на направляющую платформу, а носовое колесо - на дополнительную горизонтально-подвижную направляющую. На основной направляющей под колеса устанавливают упор, который выдвигается и задвигается в тело основной направляющей по команде оператора. Запускают один двигатель самолета (или несколько) и выводят их на заданный режим работы, проводят выдержку на заданном режиме и датчиком силы регистрируют величину A горизонтальной проекции искомого вектора тяги R на горизонтальное направление X-X, по этому же направлению основная направляющая воздействует силой A на датчик силы. При помощи приборов определяют величины Z1 и Z2 - расстояния меток от оси X-X или от поверхности аэродрома до запуска двигателей и после вывода на заданный режим определяют новое положение оси двигателей, вычисляют угол  наклона оси и вводят поправку на измерение тяги датчиком по формуле R = A/Cos a . 2 с. и 1 з.п. ф-лы, 2 ил.
наклона оси и вводят поправку на измерение тяги датчиком по формуле R = A/Cos a . 2 с. и 1 з.п. ф-лы, 2 ил.
Изобретение относится к авиации, в частности к измерению тяги авиадвигателей в составе самолета в эксплуатации, в аэродромных условиях.
Целью изобретения является повышение точности измерения путем исключения трения колес самолета о полотно-покрытие аэродрома и учета изменения пространственного положения оси двигателя. На фиг. 1 изображена схема измерения тяги двигателя в составе самолета; на фиг. 2 - горизонтально-подвижная направляющая в виде платформы, установленной, например, на станине на гибких лентах. Способ измерения силы тяги состоит в том, что самолет предварительно фиксируют на горизонтально-подвижном основании, наносят метки на поверхности корпуса, указывающие положение продольной оси двигателя, и замеряют расстояние от них до основания, производят запуск двигателя, определяют силу тяги на различных режимах, во время измерения тяги определяют изменение положения меток относительно первоначального положения, а величину тяги корректируют с учетом изменения положения оси двигателя по формуле R = A cos , где A - измеренная величина силы тяги; - угол наклона продольной оси двигателя. Устройство для измерения тяги авиационного двигателя в составе самолета содержит датчик 1 силы, установленный в станине 2, размещенной в углублении, выполненном в полотне-покрытии 3 аэродрома. На станине 2 установлены с зазором горизонтально-подвижные направляющие 4, выполненные в виде платформы, установленной на станине 2 с минимальным сопротивлением смещению в горизонтальном направлении, например, с использованием гибких лент 5. Кроме гибких лент 5 для тех же целей могут быть использованы подшипники, гидростатические или пневмостатические опоры и другие устройства, обеспечивающие минимальное сопротивление горизонтальному смещению направляющей 4 относительно станины 2. Поверхность 6 направляющей 4 параллельна и совпадает с поверхностью полотна-покрытия 3 аэродрома. Направляющая 4 может быть в зависимости от размеров самолета выполнена таких размеров, что на нее могут быть установлены все колеса: основные 7 и носовые 8 самолета 9 с двигателями 10, тягу которых необходимо определять. Учитывая значительные расстояния между колесами 7 и 8 современных самолетов, возможно выполнение дополнительной направляющей 11 под переднее колесо 8, выполненное аналогично направляющей 4, установленной на отдельной станине 12. На поверхности 6 направляющей 4 может быть установлен упор 13 для колес 7, который может быть снабжен механизмом выдвижения его и уборки в тело направляющей 4. На самолете 9 нанесены метки 14 и 15, определяющие положение оси 16 двигателей 10 и вектора тяги R, развиваемой этими двигателями. Направляющая 4 горизонтального перемещения связана толкателем-тягой 17 тягой, если она работает на растяжение, толкателем, если она работает на сжатие, с датчиком 1 измерения силы, закрепленным на станине 2. Самолет 9 устанавливают основными колесами 7 на направляющую 4 платформы, а носовое колесо 8 - на дополнительную горизонтально-подвижную направляющую 11. На основной направляющей 4 под колеса 7 устанавливают упор 13, который выдвигается и задвигается в тело направляющей 4 по команде оператора. Запускают один двигатель 10 самолета 9 (или несколько) и выводят их на заданный режим работы, проводят выдержку на заданном режиме и датчиком силы 1 регистрируют величину A горизонтальной проекции искомого вектора тяги R на горизонтальное направление Х-Х, по этому же направлению направляющая 4 воздействует силой A на датчик 1 силы. При помощи приборов определяют величины Z1 и Z2 - расстояния меток 14 и 15 от оси Х-Х или от поверхности аэродрома до запуска двигателей и после вывода на заданный режим определяют новое положение оси 16 двигателей 10, вычисляют угол наклона и вводят поправку на измерение тяги датчиком 1 по формуле R = A/cos .
cos , где A - измеренная величина силы тяги; - угол наклона продольной оси двигателя. Устройство для измерения тяги авиационного двигателя в составе самолета содержит датчик 1 силы, установленный в станине 2, размещенной в углублении, выполненном в полотне-покрытии 3 аэродрома. На станине 2 установлены с зазором горизонтально-подвижные направляющие 4, выполненные в виде платформы, установленной на станине 2 с минимальным сопротивлением смещению в горизонтальном направлении, например, с использованием гибких лент 5. Кроме гибких лент 5 для тех же целей могут быть использованы подшипники, гидростатические или пневмостатические опоры и другие устройства, обеспечивающие минимальное сопротивление горизонтальному смещению направляющей 4 относительно станины 2. Поверхность 6 направляющей 4 параллельна и совпадает с поверхностью полотна-покрытия 3 аэродрома. Направляющая 4 может быть в зависимости от размеров самолета выполнена таких размеров, что на нее могут быть установлены все колеса: основные 7 и носовые 8 самолета 9 с двигателями 10, тягу которых необходимо определять. Учитывая значительные расстояния между колесами 7 и 8 современных самолетов, возможно выполнение дополнительной направляющей 11 под переднее колесо 8, выполненное аналогично направляющей 4, установленной на отдельной станине 12. На поверхности 6 направляющей 4 может быть установлен упор 13 для колес 7, который может быть снабжен механизмом выдвижения его и уборки в тело направляющей 4. На самолете 9 нанесены метки 14 и 15, определяющие положение оси 16 двигателей 10 и вектора тяги R, развиваемой этими двигателями. Направляющая 4 горизонтального перемещения связана толкателем-тягой 17 тягой, если она работает на растяжение, толкателем, если она работает на сжатие, с датчиком 1 измерения силы, закрепленным на станине 2. Самолет 9 устанавливают основными колесами 7 на направляющую 4 платформы, а носовое колесо 8 - на дополнительную горизонтально-подвижную направляющую 11. На основной направляющей 4 под колеса 7 устанавливают упор 13, который выдвигается и задвигается в тело направляющей 4 по команде оператора. Запускают один двигатель 10 самолета 9 (или несколько) и выводят их на заданный режим работы, проводят выдержку на заданном режиме и датчиком силы 1 регистрируют величину A горизонтальной проекции искомого вектора тяги R на горизонтальное направление Х-Х, по этому же направлению направляющая 4 воздействует силой A на датчик 1 силы. При помощи приборов определяют величины Z1 и Z2 - расстояния меток 14 и 15 от оси Х-Х или от поверхности аэродрома до запуска двигателей и после вывода на заданный режим определяют новое положение оси 16 двигателей 10, вычисляют угол наклона и вводят поправку на измерение тяги датчиком 1 по формуле R = A/cos .Формула изобретения
СПОСОБ ИЗМЕРЕНИЯ СИЛЫ ТЯГИ АВИАЦИОННОГО ДВИГАТЕЛЯ В СОСТАВЕ САМОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ. 1. Способ измерения силы тяги авиационного двигателя в составе самолета, заключающийся в том, что производят запуск двигателя и определяют силу тяги на различных режимах, отличающийся тем, что, с целью повышения точности измерения путем исключения трения колес самолета о полотно-покрытие аэродрома и учета изменения пространственного положения оси двигателя, предварительно фиксируют самолет на горизонтально-подвижном основании, наносят на поверхность корпуса метки, указывающие положение продольной оси двигателя, и замеряют расстояние от них до основания, во время замера тяги определяют изменением положения меток от первоначального с последующим определением угла наклона продольной оси двигателя, а величину силы тяги с учетом измерений определяют по формуле R = A/cos , где A - измеренная величина силы тяги; - угол наклона продольной оси двигателя. 2. Устройство для измерения силы тяги авиационного двигателя в составе самолета, содержащее датчик силы, укрепленный на упоре, установленном в полотне-покрытии аэродрома, отличающееся тем, что, с целью повышения точности измерения тяги двигателя при его технической диагностике путем уменьшения трения колес самолета о полотно-покрытие аэродрома, оно снабжено станиной, в полотне-покрытии аэродрома выполнено углубление, в котором размещена станина, горизонтально-подвижными направляющими, установленными на станине с зазором относительно последней и выполненными в виде платформы, на горизонтальной поверхности которой укреплены колеса самолета, при этом датчик силы сообщен с платформой, а ось его чувствительного элемента, воспринимающего силу тяги, расположена на расстоянии не более 1,2H от продольной оси двигателя, где H - расстояние от последней до поверхности полотна-покрытия аэродрома. 3. Устройство по п.2, отличающееся тем, что, с целью повышения надежности путем исключения попадания посторонних предметов в зазор между станиной и платформой, оно снабжено уплотнителем, установленным по периметру зазора.РИСУНКИ
Рисунок 1, Рисунок 2www.findpatent.ru