Шаговый двигатель – это исполнительный привод многих современных аппаратов: станков, приворов, автоматов. Шаговый двигатель в паре со специальным блоком управления призван преобразовывать входной электрический сигнал в механическое перемещение ротора – определенный угол, назваемый также основным угловым шагом двигателя.
По принципу действия шаговый двигатель относится к двигателям синхронного типа: в нем существует связь между сигналом питания и положением ротора двигателя.
В настоящий момент распространены и повсеместно применяются гибридные шаговые двигатели, которые обладают достоинствами двигателей с постоянными магнитами и синхронных реактивных двигателей с переменным магнитным сопротивлением. Гибридные шаговые двигатели имеют вращающий момент, пропорциональный току, и характеризуются большим числом шагов на оборот.
Шаговый двигатель (ШД) может быть рассмотрен как ДПТ без коллекторного узла. Обмотки ШД являются частью статора. На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала. Все коммутации производятся внешними схемами. Обычно система мотор — контроллер разрабатывается так, чтобы была возможность вывода ротора в любую, фиксированную позицию, то есть система управляется по положению. Цикличность позиционирования ротора зависит от его геометрии.
Принято различать шаговые двигатели (Autonics, Motionking, Fulling motor) и серводвигатели (Lenze). Принцип их действия во многом похож, и многие контроллеры могут работать с обоими типами. Основное отличие заключается в шаговом (дискретном) режиме работы шагового двигателя (n шагов на один оборот ротора) и плавности вращения синхронного двигателя. Серводвигатели требуют наличия в системе управления датчика обратной связи по скорости и/или положению, в качестве которого обычно используется резольвер или sin/cos энкодер. Шаговые двигатели преимущественно используются в системах без обратных связей, требующих небольших ускорений при движении. В то время как синхронные сервомоторы обычно используются в скоростных высокодинамичных системах.
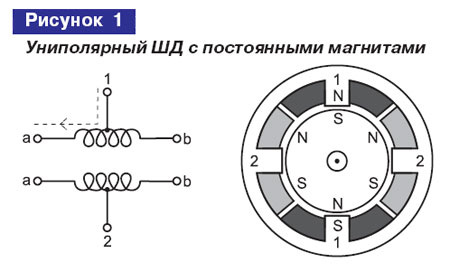
Шаговые двигатели (ШД) делятся на две разновидности: двигатели с постоянными магнитами и двигатели с переменным магнитным сопротивлением (гибридные двигатели). С точки зрения контроллера отличие между ними отсутствует. Двигатели с постоянными магнитами обычно имеют две независимые обмотки, у которых может присутствовать или отсутствовать срединный отвод (см. рис. 1).
Биполярные шаговые двигатели с постоянными магнитами и гибридные двигатели сконструированы более просто, чем униполярные двигатели, обмотки в них не имеют центрального отвода (см. рис. 2).
automationlab.ru
30.11.2017, Рубрика:Статьи
Гибридный шаговый двигатель был создан с целью объединить лучшие свойства обоих шаговых двигателей: реактивного и с постоянными магнитами, что позволило добиться меньшего угла шага. Ротор гибридного шагового двигателя представляет из себя цилиндрический постоянный магнит, намагниченный вдоль продольной оси с радиальными зубьями из магнитомягкого материала.

Конструкция гибридного шагового двигателя (осевой разрез)
Статор обычно имеет две или четыре фазы распределенные между парами явно выраженных полюсов. Обмотки статора могут иметь центральное ответвление для униполярного управления. Обмотка с центральным ответвлением выполняется с помощью бифилярной намотки.

Гибридный шаговый двигатель (радиальный разрез)
Заметьте что 48 зубьев на одной секции ротора смещены на половину зубцового деления λ относительно другой секции (рисунок ниже). Из-за этого смещения ротор фактически имеет 96 перемежающихся полюсов противоположной полярности.

Ротор гибридного шагового двигателя
Зубья на полюсах статора соответствуют зубьям ротора, исключая отсутствующие зубья в пространстве между полюсами. Таким образом один полюс ротора, скажем южный полюс, можно выровнять со статором в 48 отдельных положениях. Однако зуб южного полюса ротора смещен относительно северного зуба на половину зубцового деления. Поэтому ротор может быть выставлен со статором в 96 отдельных положениях.
Соседние фазы статора гибридного шагового двигателя смещены друг относительно друга на одну четверть зубцового деления λ. В результате ротор перемещается с шагом в четверть зубцового деления во время переменного возбуждения фаз. Другими словами для такого двигателя на один оборот приходится 2×96=192 шага.
alvse.ru
Гибридные шаговый двигатель дизайн принцип
Дизайн принцип и контроль над 3 - фазы гибридный шагая мотор драйвера. Предисловие шаговый двигатель является разомкнутой движения системы сервопривода, контролирует вывод и выводящая углового смещения. Его выдающиеся преимущества по сравнению с мотор сервопривода AC и DC мотор сервопривода, является низкая цена, а не накопление ошибок. Однако шаговый двигатель работает, есть много недостатков, такие колебания низкой частоты, шум, резолюция не высок, но также серьезно ограничивает сферу применения шагового двигателя. Шаговый мотор эксплуатационные характеристики и его привод тесно связаны, вы можете управлять усовершенствования технологии для преодоления недостатков шагового двигателя. По сравнению с другими методами, вождение, режим drive подразделение может не только уменьшить шагая мотор шаговый угол, улучшить резолюции и возможно уменьшить или устранить низкочастотной вибрации, мотор работает более плавно и равномерно. В общем управляемые подразделением управления является лучшим. Потому что часто используемые low-end шаговый мотор сервопривода системы без кодировщик обратной связи, так как Мотор скорости увеличивает его внутреннего контроля тока соответственно понизится, что приведет в потеряли шаг явление. Таким образом скорость и точность требования поля не высок, его применение весьма обширна. Потому что Шаговыи электродвигатель трехфазный гибрид имеет лучшую стабильность низкой скорости и выходной крутящий момент чем двухфазной шагового двигателя, трехфазные гибрид, шаговый двигатель имеет лучше приложений проспект чем двухфазной шагового двигателя. Традиционные трехфазные гибридный шагая мотор управления метод завершается аппаратного обеспечения компаратора. Главным образом этот документ вводит использование алгоритма векторных DSP и пространства SVPWM реализовать трехфазные гибридный шагая управления двигателем. 2. подразделение принцип шагая мотор подразделение управления является по существу через шагового электродвигателя обмотки статора, текущий элемент управления, так что шаговый двигатель в синтетических магнитного поля меняется в зависимости от определенных требований, с тем чтобы достичь шаговый мотор шаг угол разбивка. Самый лучший способ разделить это постоянный крутящий момент и угол подразделением другой шаг. При нормальных обстоятельствах синтетические магнитного поля вектора определяет масштабы крутящий момент мотора вращения, рядом два синтетических магнитного поля вектора между угол размера определяет размер шаг угла. В мотор производить рядом единый циркуляр вращающегося магнитного поля, каждой фазы обмотки синтетической магнитного поля вектора, то есть, каждой фазы обмотки текущий вектор должно быть в пространстве для постоянной амплитудой вращательного движения, которые должны Передайте в каждой фазе синусоидальный текущей. Гибрид-трехфазная шаговый двигатель работает очень похож на синхронных серводвигателя переменного тока постоянного магнита. Постоянный магнит магнит, используемые в ротор является также редкоземельных постоянных магнитов материал с высокой магнитной плотности, поэтому эффект индуцированный ток на ротор на магнитного поля ротора является незначительным. В структуре это эквивалентно многополюсные логарифмической переменного тока постоянного магнита синхронного двигателя. Поскольку ввод синусоидального тока трехфазные, циркулярно распространяется в результате магнитного поля, и крутящий момент характеристики шаговый электродвигатель трехфазный гибридные могут быть проанализированы с помощью структурной модели постоянного магнита, синхронные Мотор (рис. 1). Ради удобства анализа, могут быть сделаны следующие допущения: a. обмотки статора трехфазный мотор полностью симметрично; b. магнитного насыщения, вихревые токи и основные потери игнорируются; c. возбуждение текущего ответа динамический процесс.
Три фазы постоянного магнита синхронного двигателя простую структуру модели U, V, W статора на три катушки замотки, три обмотки обмотки оси в 120 °. Когда напряжением однофазного обмотке двигателя, установившемся крутящий момент может быть выражена как: T = f (i, тета). Где i — ток через обмотки; тета-это угол, на котором ротора двигателя отклоняется от точки отсчета. Так как магнитного насыщения эффект незначителен, и структура ротора циркуляр, угол ее момент строго синусоидального, из-за внутренней круговой вращающегося магнитного поля, мотор выходной крутящий момент является постоянным. Таким образом применяется принцип управления серво переменного тока трехфазный гибридные шагового привода системы, ввода 220V AC, исправить в DC, и через технологии модуляции ширина импульса в лестнице трехступенчатые синусоидальная волна текущего, они нажмите Исправлена сроки, соответственно, через трехходовой обмотки, каждая лестница, соответствующий шаг вращения мотора.
ru.oemotor-de.com