





Вращение – это угловое движение ротора вокруг своего геометрического центра или оси вала. Теоретически, вращение может происходить без какого-либо поперечного (бокового) движения ротора. В отсутствие каких-либо внешних сил идеально отбалансированный ротор будет вращаться на одном месте вокруг геометрического центра вала без какого-либо изменения положения (без перемещения, без вибрации) этого центра (левая сторона рис.1-7).
Прецессия – это перемещение, или вибрация, геометрического центра ротора в плоскости ХY, которая перпендикулярна оси ротора. Прецессию также называют движением по орбите. Орбита наглядно показывает боковое перемещение оси ротора. На рисунке оно показано зеленым цветом. Прецессия может иметь место даже тогда, когда ротор не вращается; она совершенно не зависит от вращения (правая сторона рис.1-7). Орбита ротора может варьироваться от точно круговой до очень сложной формы, которая будет содержать много частот вибрации.
Ротор может вращаться без вибрации, а может вибрировать без вращения. Однако обычно имеет место и вращение, и прецессия.
Вместо терминов «по часовой стрелке» и «против часовой стрелки» для обозначения направления вращения и прецессии можно употреблять словосочетания: «движение от Y к X» и «движение от X к Y» соответственно.
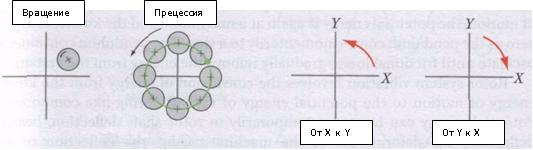
Рисунок 1-7 Вид с торца на вращение и прецессию вала. Слева – вал вращается вокруг своего геометрического центра без вибрации, пример чистого вращения. Справа – невращающийся вал движется по орбите, которая выделена зеленым цветом. Это – пример чистой прецессии. Рисунок 1-8 Варианты обозначения вращения и прецесии. Слева – угловое движенние от X к Y (против часовой стрелки). Справа – угловое движение от Y к X (по часовой стрелке).
Термины «от Х к Y» и «от Y к Х» более предпочтительны, чем термины «против часовой стрелки» и «по часовой стрелке», потому что при фиксированной системе координат угловое направление для наблюдателя неизменно. Например, если смотреть на агрегат со стороны привода, то ротор поворачивается от X к Y (против часовой стрелки), а если стать с противоположной стороны агрегата, то для наблюдателя он поворачивается уже по часовой стрелке, в то время как базовое направление «от X к Y» остается прежним.
Когда направление прецессии совпадает с направлением вращения (например, от X к Y или от Y к X для обоих), движение определяют термином «прямая прецессия». Когда направление прецессии противоположно направлению вращения, движение называют термином «обратная прецессия». Эти понятия прямой и обратной прецессии имеют широкое применение при работе с полным спектром и при диагностике определенных видов неисправностей.
Автор: Donald E. Bently "Fundamentals of Rotating Machinery Diagnostics"Перевод: Виктор и Алексей Рожковы (rotkiv)
vdiagnostike.ru
СОЮЗ СОВЕТСНИХ
СОЦИАЛИСТИЧЕСКИХ
РЕСПУБЛИН
„„SU„„1204468 А
К ABTOPCHOMY СВИДЕТЕЛЬСТВУ
ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССР
ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ (21) 3767907/27-11 (22) 16.07.84 (46) 15.01.86. Бюл. № 2 (72) С. Б. Абатуров и В. Т. Филин (53) 629.12.006.16 (088.8) (56) Благовещенский С. Н. Качка корабля.
Судпромгиз, Л.: 1954, с. 490 †4. (54) (57) УСТРОЙСТВО ДЛЯ РАСКАЧИ—
ВАНИЯ МОДЕЛИ СУДНА, содержащее основание для его крепления к модели судна, на котором размещены электрические гидромоторы и прецессионный электродвигатель, кинематически связанные между собой, отличающееся тем, что, с целью повышения точности получения гидродинамических характеристик модели судна, отраВ 63 В 9/08, G 01 М 10/00 жающих сложное движение натурного судна под воздействием нерегулярного возмущающего момента качки с заданным энергетическим спектром, оно снабжено установленным на валу прецессионного двигателя электрическим датчиком скорости, усилителем случайных электрических сигналов и электрическим задатчиком случайного стационарного закона возмущающих сил, электрически связанным с электрическим датчиком скорости прецессионного двигателя и одним из входов электрического усилителя случайных электрических сигналов, другой вход которого электрически связан с электрическим датчиком скорости прецессионного двигателя, а выход — с входом прецессионного двигателя. с
1204468
Составители lO, Серов
Редактор Ю. Середа Текред И. Версс Корректор E. Рошко
Заказ 8473, 17 Т раж 122 Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж--35, Раушская наб., д. 4/5 филиал ППП «Патент», г. Ужгород, ул Г!роектная, 4
Изобретение относится к судостроению, в частности к устройству для раскачивания модели судна.
Цель изобретения — повышение точности получения гидродинамических характеристик модели судна, отражающих сложное движение натурного судна под воздействием нерегулярного возмущающего момента качки с заданным энергетическим спектром.
На чертеже изображено предлагаемое устройство, общий вид.
Устройство состоит из двух электрических гидромоторов 1, роторы которых закреплены с помощью рамок 2 на шестернях
3, вращающихся в подшипниках 4, установленных на основании 5. Шестерни 3 связаны друг с другом и вращаются в разные стороны прецессионным двигателем 6, на валу которого установлен датчик 7 скорости, электрически соединенный с усилителем 8 и задатчиком 9 случайного стационарного процесса таким образом, что QHH образуют замкнутую систему автоматического регулирования.
При этом электрический задатчик 9 электрически связан с электрическим датчиком 7 скорости и одним из входов электрического усилителя 8, другой вход которого электрически связан с электрическим датчиком 7 скорости, а выход — с входом прецессионного двигателя 6.
Устройство работает следующим образом.
Устройство через основание 5 крепится к испытуемой модели судна и буксируется с помощью тросиков или как самоходная модель в зависимости от поставленной задачи.
Перед началом движения модели включают электрические гидромоторы 1, которым необходимо разогнаться до номинальных оборотов. Ранее на электрическом задатчике 9 в масштабе моделирования условий и параметров движения испытываемой модели задают расчетные статические характеристики. С началом движения модели включают прецессионный двигатель 6, который согласно управляющим сигналам осу1цествляет раскачивание модели по случайному стационарному закону в соответствии с заданным энергетическим спектром. Сигналы с датчиком измерения углов качки модели регистрируются осциллографом или вводятся непосредственно в ЭВМ, где проходят статическу ю обработку для получения гидродинамических коэффициентов испытываемой модели.


www.findpatent.ru
Изобретение относится к области машиностроения и может быть использовано преимущественно для уменьшения раскачивания груза на канате строительного крана. Устройство для гашения колебаний груза, подвешенного на канате строительного крана содержит корпус, внутри которого через подшипники, симметрично установленные относительно центральной вертикальной оси устройства, установлена с возможностью поворота относительно центральной поперечной горизонтальной оси устройства горизонтальная рама. На общем с горизонтальной рамой валу установлены редуктор прецессионного двигателя и тормоз. С горизонтальной рамой внутренним образом соединена вертикальная рама с возможностью поворота относительно центральной поперечной горизонтальной оси устройства. На общем с вертикальной рамой валу соосно установлены другие редуктор и тормоз, имеющие с вертикальной рамой общую ось, совпадающую с центральной продольной осью устройства. Вертикальная рама связана с асинхронным двигателем, имеющим с ней общую вертикальную ось. Внутри корпуса жестко закреплен датчик периода колебаний, а снаружи в верхней части корпуса закреплены подвеска, а в нижней - грузовой крюк. Технический результат - повышение эффективности гашения колебаний и расширение конструктивных особенностей. 1 з.п. ф-лы, 1 ил.
Изобретение относится к области машиностроения и может быть использовано преимущественно для уменьшения раскачивания груза на канате строительного крана.
Известно изобретение - аэродинамический стабилизатор-наводчик груза подъемного крана (Журнал "Строительные и дорожные машины", 1998, №1, с.17-19), содержащий многолопастную воздушную крыльчатку с быстроходным электроприводом. На корпусе стабилизатора по окружности расположены всасывающие и выхлопные отверстия. Отверстия могут перекрываться заслонками с электромагнитным приводом. Устройство содержит также датчик углового отклонения от вертикали и микропроцессорный блок управления стабилизацией и наводкой. Стабилизатор-наводчик груза имеет инфракрасные детекторы для приема управляющих сигналов, излучаемых ручным пультом управления, который находится у монтажника. Гашение свободных колебаний груза и его перемещение в горизонтальной плоскости в определенных пределах достигается периодическим изменением направления вектора тяги воздушной крыльчатки стабилизатора. Стабилизатор навешивают на крюк крана как сменное оборудование или при длительном использовании крепят непосредственно к крюковой обойме. Для навешивания грузозахватных приспособлений в нижней части стабилизатора имеется стандартный крюк.
Аэродинамический стабилизатор-наводчик груза позволяет сократить скорость и время наводки и установки монтируемого блока в проектное положение.
Недостатками данного устройства является следующее.
1. Использование стабилизатора-наводчика груза преимущественно направлено на гашение колебаний груза при строительстве высотных сооружений.
2. Следует отметить значительную дороговизну устройства (8-10% от стоимости строительного крана).
3. Сложность конструкции.
Другим известным изобретением является поворотное грузозахватное устройство, выпускаемое фирмой "Пайнер" (ФРГ), содержащее асинхронный двигатель, статорная часть которого закреплена на валу, который через подпятник опирается на подвесную скобу, навешиваемую на переходное кольцо. В свою очередь, переходное кольцо навешивается на крюк каната строительного крана. Роторная часть электродвигателя закреплена в корпусе, опирающемся на вал через подшипники качения, а выходной конец последнего, выполненный в виде замкнутой петли, используется для навески собственно грузозахватного устройства для груза. Питание роторной части электроэнергией осуществляется через гибкий кабель и кольцевые токосъемники (Вайнсон А.А., Андреев А.Ф. Крановые грузозахватные устройства: Справочник. - М.: Машиностроение, 1982. - С.40-41).
Поворотное устройство позволяет ориентировать монтируемый груз в необходимое положение.
Недостатками изобретения является следующее.
1. Невозможность стабилизировать раскачивание груза в вертикальной плоскости.
2. Отсутствие в устройстве автоматического регулирования процессом уравновешивания груза на канате строительного крана.
Наиболее близким к предлагаемому изобретению относится устройство для гашения колебаний груза, подвешенного на канате строительного крана, содержащее асинхронный двигатель, вращающийся относительно вертикальной оси, статорная часть которого жестко закреплена на валу, опирающемся через подпятник на подвесную скобу, связанную через переходное кольцо с крюком крана, а роторная часть, питание которой осуществляется через гибкий кабель и кольцевые токосъемники, закреплена в корпусе, опирающемся на вал через подшипники качения, причем выходной конец вала выполнен в виде замкнутой петли для навески груза; на валу установлен дополнительно асинхронный двигатель с возможностью вращения вала в сторону, противоположную вращению первого асинхронного двигателя, на корпусах асинхронных двигателей жестко закреплены расположенные взаимно перпендикулярно в горизонтальной плоскости две пары металлических стержней, на которых с возможностью перемещения по ним установлены грузила, при этом датчик углового отклонения груза от вертикали через микропроцессорный блок управления соединен с асинхронными двигателями (Патент РФ №2224708 от 27.02.04 г., М. кл. В 66 С 13/06).
Недостатками данного изобретения является следующее.
1. Масса подвешиваемого груза ограничивает прецессионное движение вала.
2. В устройстве отсутствует датчик периода колебаний, необходимый для управления длительностью прецессии.
3. Использование второго асинхронного двигателя влечет за собой увеличение массы конструкции устройства и его стоимость.
Задачей изобретения является повышение эффективности гашения колебаний в двух взаимно перпендикулярных вертикальных плоскостях за счет расширения его конструктивных особенностей.
Поставленная задача достигается тем, что
1. Устройство для гашения колебаний груза, подвешенного на канате строительного крана, содержащее асинхронный двигатель, вращающийся относительно вертикальной оси, и датчик углового отклонения груза от вертикали, связанный с микропроцессорным блоком управления, содержит корпус, внутри которого через подшипники, симметрично расположенные относительно центральной вертикальной оси устройства, установлена с возможностью поворота относительно центральной поперечной горизонтальной оси устройства горизонтальная рама, на общем с горизонтальной рамой валу соосно установлены редуктор прецессионного электродвигателя и тормоз, причем с горизонтальной рамой внутренним образом шарнирно соединена вертикальная рама посредством подшипников, симметрично расположенных относительно центральной поперечной горизонтальной оси, с возможностью поворота относительно центральной продольной горизонтальной оси устройства, на общем с вертикальной рамой валу соосно установлены другие редуктор прецессионного электродвигателя и тормоз, имеющие с вертикальной рамой общую ось, совпадающую с центральной продольной горизонтальной осью устройства, а также вертикальная рама связана с упомянутым асинхронным двигателем, имеющим с ней общую вертикальную ось.
2. Устройство по п.1 содержит внутри корпуса жестко закрепленый датчик периода колебаний, а снаружи корпуса в верхней его части жестко закреплены подвеска, а в нижней - грузовой крюк.
Новые существенные признаки.
1. Устройство содержит корпус.
2. Внутри корпуса установлена с возможностью поворота относительно центральной поперечной горизонтальной оси устройства горизонтальная рама.
3. Горизонтальная рама установлена через подшипники, симметрично расположенные в стенках корпуса относительно центральной вертикальной оси устройства.
4. На общем с горизонтальной рамой валу установлены редуктор прецессионного электродвигателя и тормоз.
5. Вал, редуктор, прецессионный электродвигатель и тормоз имеют с горизонтальной рамой общую ось, совпадающую с центральной поперечной горизонтальной осью устройства.
6. Вертикальная рама установлена внутри горизонтальной рамы посредством подшипников с возможностью поворота относительно центральной продольной горизонтальной оси устройства.
7. Подшипники расположены на горизонтальной раме симметрично относительно центральной поперечной горизонтальной оси устройства.
8. На общем с вертикальной рамой валу установлены другие редуктор прецессионного электродвигателя и тормоз.
9. Вал, редуктор, прецессионный двигатель и тормоз имеют с вертикальной рамой общую ось, совпадающую с центральной продольной горизонтальной осью устройства.
10. Вертикальная рама связана с асинхронным двигателем, имеющим с ней общую вертикальную ось.
11. Внутри корпуса жестко закреплен датчик периода колебаний.
12. Снаружи корпуса в верхней его части жестко закреплены подвеска, а в нижней - грузовой крюк.
Перечисленная совокупность признаков обеспечивает получение технического результата во всех случаях, на которые распространяется испрашиваемый объем правовой охраны.
Технический результат обеспечивается наличием в устройстве горизонтальной и вертикальной рам с асинхронным двигателем, установленным в последней. Величина, направление и длительность принудительной прецессии асинхронного двигателя определяется датчиками угла и периода колебаний грузового подвеса и осуществляется прецессионными электродвигателями по командам микропроцессорного блока. С помощью жестко закрепленной снаружи верхней части корпуса подвески устройство навешивается на грузозахватный орган крана, а жестко закрепленный снаружи корпуса в его нижней части грузовой крюк предназначен для навешивания перемещаемого груза.
Устройство для гашения колебаний груза, подвешенного на канате строительного крана, изображено на фиг.1 - схема общего вида устройства.
Устройство содержит корпус 1, в котором через подшипники 2, симметрично расположенные относительно центральной вертикальной оси 3 устройства, установлена с возможностью поворота относительно центральной горизонтальной оси 4 устройства горизонтальная рама 5. Снаружи корпуса 1 на общем с горизонтальной рамой 5 валу 6 соосно установлены редуктор 7 прецессионного электродвигателя 8 и тормоз 9. С горизонтальной рамой 5 внутренним образом шарнирно связана вертикальная рама 10 посредством подшипников 11, расположенных на горизонтальной раме 5 симметрично относительно центральной поперечной горизонтальной оси 4 устройства. Вертикальная рама 10 установлена с возможностью поворота относительно центральной продольной горизонтальной оси 12 устройства. На общем с вертикальной рамой 10 валу 13 соосно установлены: редуктор 14 прецессионного электродвигателя 15 и тормоз 16, имеющие с последней общую ось, совпадающую с центральной продольной горизонтальной осью 12 устройства. Вертикальная рама 10 подвижно связана через подшипники 17 с асинхронным двигателем 18, имеющим с ней общую вертикальную ось 3. Внутри корпуса 1 жестко закреплены датчик угла 19, датчик периода колебаний 20 и микропроцессорный блок 21. Снаружи корпуса 1 в верхней его части жестко закреплены подвеска 22, а в нижней - грузовой крюк 23.
Устройство работает следующим образом.
Гашение колебаний груза происходит автоматически по команде микропроцессорного блока 21, обрабатывающего сигналы датчиков угла 19 отклонения груза от вертикали и датчика периода колебаний 20. В зависимости от того, в какую сторону произошло отклонение груза от вертикали, автоматически приводятся в действие электродвигатели 8 и (или) 15 в сторону прецессии.
При отклонении грузового подвеса на угол β относительно оси 3 прецессия вертикальной рамы 10 с асинхронным двигателем 18 создается через редуктор 14 прецессионным электродвигателем 15, управляемым микропроцессорным блоком 21, обрабатывающим сигналы датчика угла 19 и датчика периода колебаний 20. Одновременно по сигналу микропроцессорного блока 21 растормаживается тормоз 16 вала 13 вертикальной рамы 10. Следствием прецессионного движения вертикальной рамы 10 с асинхронным двигателем 18 является гироскопический стабилизирующий момент.
Когда угол прецессии вертикальной рамы 10 от среднего положения достигнет предельного значения α=(30÷60)°, электродвигатель 15 отключается через микропроцессорный блок 21. Одновременно включается тормоз 16.
По окончании четверти периода колебаний датчик периода колебаний 20 сообщает сигнал на микропроцессорный блок 21, который формирует управляющие сигналы тормозу 16 и электродвигателю 15. Последний начинает вращаться в обратную сторону и по окончании полупериода колебаний приведет ось асинхронного двигателя 18 в вертикальное положение.
При отклонении грузового подвеса на угол α в плоскости осей 3 и 4 (вокруг оси 12) прецессия горизонтальной рамы 5 с асинхронным двигателем 18, закрепленным в вертикальной раме 10, создается через редуктор 7 электродвигателем 8, управляемым микропроцессорным блоком 21, обрабатывающим сигналы датчика угла 19 и периода колебаний 20. Одновременно по сигналу микропроцессорного блока 21 растормаживается тормоз 9 вала 6 вертикальной рамы 10. Следствием прецессионного движения горизонтальной рамы 5 с асинхронным двигателем 18 является гироскопический стабилизирующий момент.
Когда угол прецессии β горизонтальной рамы 5 от среднего положения достигнет предельного значения β=(30÷60)°, электродвигатель 8 отключается микропроцессорным блоком 21. Одновременно включается тормоз 9.
По окончании четверти периода колебаний датчик периода колебаний 20 дает сигнал на микропроцессорный блок 21, который формирует управляющие сигналы тормозу 9 и электродвигателю 8. Последний начинает вращаться в обратную сторону и по окончании полупериода колебаний приведет ось 3 асинхронного двигателя 18 в вертикальное положение.
Перечень позиций на чертеже к заявке
УСТРОЙСТВО ДЛЯ ГАШЕНИЯ КОЛЕБАНИЙ ГРУЗА, ПОДВЕШЕННОГО НА КАНАТЕ СТРОИТЕЛЬНОГО КРАНА
1 - корпус;
2 - подшипники;
3 - ось устройства центральная вертикальная;
4 - ось устройства центральная поперечная горизонтальная;
5 - рама горизонтальная;
6 - вал;
7 - редуктор;
8 - электродвигатель прецессионный;
9 - тормоз;
10 - рама вертикальная;
11 - подшипники;
12 - ось устройства центральная продольная горизонтальная;
13 - вал;
14 - редуктор;
15 - электродвигатель прецессионный;
16 - тормоз;
17 - подшипники;
18 - двигатель асинхронный;
19 - датчик угла;
20 - датчик периода;
21 - подвеска;
22 - крюк грузовой.
1. Устройство для гашения колебаний груза, подвешенного на канате строительного крана, содержащее асинхронный двигатель, вращающийся относительно вертикальной оси, и датчик углового отклонения груза от вертикали, связанный с микропроцессорным блоком управления, отличающееся тем, что содержит корпус, внутри которого через подшипники, симметрично расположенные относительно центральной вертикальной оси устройства, установлена с возможностью поворота относительно центральной поперечной оси устройства горизонтальная рама, на общем с горизонтальной рамой валу соосно установлены редуктор прецессионного электродвигателя и тормоз, причем с горизонтальной рамой внутренним образом шарнирно соединена вертикальная рама посредством подшипников, симметрично расположенных относительно центральной поперечной горизонтальной оси устройства, на общем с вертикальной рамой валу соосно установлены другие редуктор прецессионного электродвигателя и тормоз, имеющие с вертикальной рамой общую ось, совпадающую с центральной продольной горизонтальной осью устройства, а также вертикальная рама связана с упомянутым асинхронным двигателем, имеющим с ней общую вертикальную ось.
2. Устройство по п.1, отличающееся тем, что внутри корпуса жестко закреплен датчик периода колебаний, а снаружи корпуса в верхней его части жестко закреплены подвеска, а в нижней - грузовой крюк.
www.findpatent.ru
1. Устройство для преобразования энергии источника электрического тока в поступательное движение в пространстве механической конструктивно-замкнутой системы под действием внутренних сил, содержащее неподвижный центральный вал, две неподвижные крышки, посаженные на центральный вал, статор, закрепленный между двумя крышками, которые все вместе образуют герметичный корпус рабочего тела (отбрасываемой массы), выполненного в виде механизма, содержащего независимо вращающиеся во взаимно-противоположных направлениях грузы с индивидуальными приводами, закрепленными на упругих поводках с упорными элементами с возможностью их синхронного возвратно-поступательного перемещения вдоль центрального вала, размещенными в сквозных пазах ротора, выполненного в виде диска с поводками-направляющими, установленного на центральном валу с возможностью свободного вращения вокруг вала, и двух симметрично расположенных относительно ротора электростатических (электромагнитных) толкателей, выполненных в виде пар противолежащих пластин (катушек), закрепленных соответственно на внутренней поверхности крышек корпуса и толкателя, установленного на поводках-направляющих ротора.
2. Устройство по п.1, отличающееся тем, что вместо рабочей камеры ракетного двигателя используется пара взаимно-расположенных соответственно электростатических колец (электромагнитных катушек), преобразующих потенциальную энергию электрического (электромагнитного) поля в линейные импульсы силы.
3. Устройство по п.1, отличающееся тем, что линейный импульс силы воздействует на ось вращения грузов под прямым углом через толкатель.
4. Устройство по п.1, отличающееся тем, что вместо сопла реактивного двигателя, передающего тяговый линейный импульс силы перемещаемому устройству, использовано электростатическое кольцо (электромагнитная катушка), жестко закрепленное на крышке корпуса устройства.
5. Устройство по п.1, отличающееся тем, что пара электростатических колец дополнительно выполняет функцию упорных подшипниковых узлов.
6. Устройство по п.1, отличающееся тем, что вместо рабочего тела, покинувшего сопло реактивного двигателя, используется отбрасываемая масса, представляющая из себя часть перемещающегося устройства, состоящая из вращающегося относительно оси симметрии корпуса устройства ротора, имеющего в своем составе закрепленные к валу ротора на гибких поводках, обеспечивающих возвратно-поступательные перемещения относительно плоскости вращения ротора и входящих в контакт с толкателями через упоры грузов, имеющих возможность независимого вращения вокруг собственной оси симметрии, расположенной в плоскости вращения ротора перпендикулярно оси вращения ротора, являющегося активным элементом конструкции устройства по рекуперации энергии линейных импульсов силы, противоположно-направленных направлению перемещения устройства за счет действия внутренних сил.
7. Устройство по п.6, отличающееся тем, что в качестве грузов использованы массивные маховики.
8. Устройство по п.6, отличающееся тем, что в качестве грузов использованы 3D гироскопы.
9. Устройство по п.6, отличающееся тем, что рабочее тело содержит приводные двигатели для приведения грузов в синхронное независимое вращение.
10. Устройство по п.6, отличающееся тем, что вращающиеся грузы закреплены на упругих поводках, жестко прикрепленных к ротору.
11. Устройство по п.6, отличающееся тем, что ротор устройства способен преобразовывать энергию электрического тока во вращательный момент с одновременной передачей его грузам.
12. Устройство по п.6, отличающееся тем, что ротор устройства способен преобразовывать энергию электрического тока во вращательный момент с одновременной передачей его грузам.
13. Устройство по п.1, отличающееся тем, что пары электростатических колец (электромагнитных катушек) дополнительно выполняют функцию упорных подшипников.
14. Устройство по п.1, отличающееся тем, что реверс вектора тяги устройства обеспечивается изменением направления вращения ротора на противоположное с одновременным включением в работу соответствующей пары электростатических колец (электромагнитных катушек).
www.freepatent.ru
Принципиальная схема устройства ГМБ основывается на совместной работе двух известных схем механизмов: «силового гироскопа со смещённым центром тяжести» и «центробежного вибратора». Отличается тем, что в гироскопе на карданном подвесе действие центробежных сил и сил прецессии вызвано не вращающимся маховиком, а балансирным маятником; степени свободы 3D гироскопа согласованы как гармоники резонанса собственной частоты основного маятника; устройство действует как автоколебательная система с инициацией колебаний электромотором-наездником, вращающим дебаланс.
идея схемы С.Маринова [8] «Генератор Бюллера-Маринова» = центробежный вибратор
В этойой схеме симметрично и синхронно колеблятся массы дисбалансов, что приводит к осциллирующему движению всей системы (корпуса) в пространстве. Аналогичный эффект наблюдается и в родственных механизмах: инерциоидах Толчина и Савелькаева.
Отличие нашей схемы (Рис.4) от схемы центробежного вибратора состоит в том, что вращательное движение маховиков-дисбалансов было заменено колебательным движением балансирных маятников, тем смаым к «бесплатной» энергии инерции мы добавили плюс + «бесплатную» энергию гравитации в Физическом Эффекте «Прецессия».
Устройство ГМБ:
Кинематическая схема нашей установки ГМБ похожа на выше показанную схему Суорца (см. статью на сайте), но построена как система трёх балансирных маятников, как карданного подвеса основного маятника (4). Средний балансирный маятник — это подпружиненное плечо рычага «малая рамка» (1), закрепленной шарнирно в «большой рамке», которая, в свою очередь, колеблется на прочном основании, - стойки корпуса забетонированы в фундамент. Отбор мощности осуществляется с вала прецессии балансирного маятника «большая рамка».
Дебаланс (2) основного балансирного маятника колеблется с собственной резонансной частотой на валу отбора мощности (3). Второй балансирный маятник — подсистема, выполняющая роль груза (2) первого. На рычаге (4) маятника колеблется груз (5) 50 кг с собственной резонансной частотой, в два раза меньшей частоты первого маятника (1).
Это автоколебательная система.
Второй балансирный маятник также является автоколебательной системой. Его колебания инициирует и подпитывает (в резонансе) центробежный вибратор, представляющий собой электромотор с редуктором типа «наездник» (8 Вт., 27 В, 6000 об/мин.) (6), вращающий на своем валу рычаг (7) с грузом весом 70 гр (8) с угловой частотой около 1 Гц, равной частоте колебаний второго маятника.
При частоте вращения груза (8) равной около 1 Гц первый и второй маятники приходят в резонанс, начинают колебаться с максимальной амплитудой через 2 секунды после включения электромотора. Это движение на выходе вала качелей имеет следующую характеристику: колебание вращения на углу 7-10 градусов с частотой около 1 Гц.

В статье, в журнале (и на сайте) и здесь на схеме Не показана ещё одна степень свободы в карданном подвесе, то есть БОЛЬШАЯ РАМКА (см. фото), горизонтальная, которая уже на полуосях крепится к станине. То что показано выше (рисунок схемы), всё это размещается в МАЛОЙ РАМКЕ, вертикальной, а она, в свою очередь, размещается в горизонтальной. Здесь есть особенность гироскопа, можно «большую рамку» размещать плюс в другой плоскости.
Внизу на рисунке весь ГМБ в сборке. Обратите внимание, у каждой рамки есть своя пружина для регулировки резонанса. Таким образом, раскачиваются ТРИ маятника в резонанс, что даёт максимальную мощность. Но даже с одной малой рамки УЖЕ можно снимать с вала мощность, только она будет на 1\3 от максимальной (это интерпретация схемы Маринова. Но и это не хило! Кпд 100. Плюс большая рамка, начинается прецессия, это ещё в три раза увеличивает мощность, уже по Богомолову.

Колебания второго маятника происходят в плоскостях, расположенных ортогонально колебаниям первого, вследствие чего импульс инерционных сил, передаваемый на первый маятник, не «гасит» собственных резонансных колебаний второго. При непосредственном взаимодействии масс под прямым углом (при жестком или мягком соударении масс) обмен скоростью не происходит.
Легко доказать, что работа привода вращения не превращается
(не трансформируется) в работу перемещения тела от центра вращения вдоль
радиуса, причем буквально одной фразой, а именно: произведение векторов
окружного усилия от крутящего момента привода и перемещения (скорости), вдоль радиуса равно нулю, т.к. угол между ними равен 90 гр.
Это ещё Маринов доказал! Поясним проще. Это произведение есть работа (или мощность) по перемещению (скорости)
рабочего тела вдоль радиуса, совершаемая приводом. Следовательно, привод (электромотор)
не перемещает тело вдоль радиуса, т.к. его работа по радиусу равна нулю (90гр).
Это действие радиального перемещения совершает ТОЛЬКО новая радиальная, возникшая центробежная сила инерции (ЦБСИ). (см. статью и опыты на сайте.)
Таким образом, (отличается тем что)в нашей кинематической схеме есть характерная особенность: резонансная подпитка энергией Авто Колебательной Системы, направленная от второго к первому маятнику, происходит не непосредственно, а опосредствованно, за счет инициированных НОВЫХ, ДОПОЛНИТЕЛЬНЫХ центробежных сил инерции. Инициированных центробежных сил инерции (энергии деформированной структуры элементов субстанции среды физического вакуума ФВ, эфира).
В результате, осциллирующее движение по инерции всей системы масс в пространстве, переданное на вал прецессии качели (3), является второй причиной приращения мощности устройства. (есть и вторая и третья причина, второй и третий источники свободной энергии.)
Первый источник свободной энергииэто - работа сил упругости пружин и сил структурной целостности рычагов. Когда – то (во время образования солнечной системы) образовалось вещество химическое и кристаллическая структура вещества, которые аккумулировали энергию структуры эфира за счёт деформации этой структуры (вихри в эфире), то есть образования новой структуры «Вещество» (значит эти флуктуации эфир=вещество способны совершать работу, искривляя траекторию грузов из прямолинейной в криволинейную).
Благодаря этим внутренним силам вещества (энергии, работе структурных сил его целостности), искривляется траектория движения груза на криволинейную при его принудительном вращении, то есть, совершается работа по изменению направления вектора прежнего прямолинейного движения. Этот постулат о затрате работы на изменение вектора есть в каждом старом учебнике физики, но он ни как не объясняется.
То есть, работа структурной целостности вещества совершает работу искривления траектории груза. Силы эти, в свою очередь, также черпают энергию из среды ФВ в процессе постоянного энергообмена вещества и среды, обеспечивая постоянную структурную целостность вещества пружин и рычагов , в пределах природной меры его прочности (то есть до тех пор, пока сталь рычагов и пружин не «устанет»).
То есть, первичная причина получения нами «бесплатной» энергии кроется в тривиальной БОЛЬШЕЙ «прочности»структурывещества в конструкции аппарата ГМБ, ОТНОСИТЕЛЬНО МЕНЬШЕЙ прочности самойструктурысреды эфира (физического вакуума).
Оказывается, «прочность вещества», чтобы быть постоянно «прочной», должна совершать постоянную реальную работу противодействия силам внешнего разрушения структуры вещества (деталей конструкции) и постоянно затрачитвать свою внутреннюю потенциальную энергию на её постоянное возобновление (исправлене, восстановление) собственной целостности.
Так реализуется философский постулат «материя есть движение» в постулате новой парадигмы физики: элементы вещества есть флуктуация среды физического вакуума, которые, как вихри, постоянно обмениваются энергией (массоперенос энергии) со средой. Замкнутых систем (по старой парадигме) в природе не существует, поэтому второй постулат термодинамики это – абстракция, учебная модель, частный случай реальности.
Криволинейное движение масс грузов (благодаря Первому источнику энергии) формирует НОВУЮ, ДОПОЛНИТЕЛЬНУЮ искусственную систему СИЛ ИНЕРЦИИ в структуре субстанции среды эфира, - потенциальное поле центробежных сил инерции среды ФВ (эфира), которое и совершает новую работу радиального перемещения груза маятника в пространстве ПОД УГЛОМ 90 гр. к тангенциальному движению груза-дисбаланса.
Это вторая причина получения свободной энергии устройством ГМБ, объяснённая Богомоловым (открытие поля центробежных сил), а как физический эффект, сформулированная ещё ранее Мариновым .
Вторая причина, второй источник получения свободной энергии в кинематической (механической) схеме действия ГМБ кроется в предложенной ранее схеме Маринова, это образование дополнительной силы инерции. Она повторяется в известной всем схеме «центробежный вибратор». Благодаря применению этой схемы, мы в устройстве ГМБ получаем, как бы новый, бесплатный импульс и, дополнительную к уже существующей, новую энергию инерции для ПОСЛЕДУЮЩЕЙ реализации через неё полученной мощности уже в другом, следующем эффекте, в физическом эффекте «прецессия».
Новый радиальный импульс на маятнике устройства ГМБ, из-за дополнительно возникшей силы инерции (вторая причина), не использует образовавшуюся ранее энергию автоколебательной системы маятника (АКС).
Так же, кинетическая энергия маятника не расходуется на прецессию, третью причину получения свободной энергии устройством ГМБ..
Процесс колебания маятника только создаёт благоприятные условия для возникновения третьей искусственной системы, нового поля потенциальной энергии центробежных сил инерции в среде эфира (в ФВ, в Тонкой материи), «ПРЕЦЕССИЮ».
Источник новой мощности на валу прецессии есть гравитационная энергия смещённого центра масс в силовом гироскопе, но не есть кинетическая энергия самого маховика гироскопа.
Прецессия это – третий источник энергии, третья причина получения свободной (даровой) энергии в механическом устройстве ГМБ.Идея использовать схему Маринова «центробежного вибратора (дисбаланса вращения)» в другой форме работы этой схемы, в форме работы «колебания дисбалансов-маятников» принадлежит Богомолову.
3-net.ru
| Общие сведения Двигатели синхронные гистерезисные трехфазные типов ДСП-10, ДСП-25, ДСП-60 и ДСП-120 предназначены для привода механизмов со строго постоянной частотой вращения. Структура условного обозначения ДСП-ХХ: ДСП - двигатель синхронный прецизионный; ХХ - мощность, Вт (10, 25, 60, 120). Условия эксплуатации Температура окружающей среды при эксплуатации двигателя от минус 50 до 60°С; в течение 300 ч допускается эксплуатация двигателей при верхнем значении температуры среды 70°С. Температура окружающей среды в нерабочем состоянии двигателя от минус 60 до 120°С. Относительная влажность воздуха до 98% при температуре до 35°С. Пониженное рабочее атмосферное давление не ниже 666 Па. Синусоидальная вибрация в диапазоне частот от 5 до 300 Гц при максимальном ускорении 98,1 м·с-2. Линейное (центробежное) ускорение не более 98,1 м·с-2. Механические удары многократного действия с пиковым ударным ускорением не более 147 м·с-2 при длительности действия от 2 до 10 мс. Механический удар одиночного действия с пиковым ударным ускорением 491 м·с-2 при длительности действия от 2 до 6 мс. Двигатели стойки к специальным воздействиям, установленным для группы исполнения 2У по ГОСТ В 20.39.404-81 с характеристиками U1-U3 и С1-С3. Требования техники безопасности по ГОСТ 12.2.007.1-75. Двигатели также соответствуют требованиям "Правил технической эксплуатации электроустановок потребителей" и "Правил техники безопасности при эксплуатации электроустановок потребителей". Двигатели отвечают требованиям ГОСТ В 14000.5-78 и ОСТ 160.512.011-75. ОСТ 16.0.512.011-75 Технические характеристики Основные технические данные двигателей в нормальных условиях окружающей среды и при номинальных значениях напряжения и частоты приведены в табл. 1. Табл. 1 Параметры двигателей обеспечиваются при питании их трехфазным напряжением с коэффициентом формы не хуже 0,95 и несимметрией по фазам не более 2%. Предельные значения параметров двигателей приведены в табл. 2.Табл. 2 Значения частоты вращения при изменениях напряжения и частоты питания приведены в табл. 3.Табл. 3 Режим работы продолжительный (S1) по ГОСТ 183-74. Вращение правое или левое, если смотреть со стороны выходного конца вала. При включении двигателей по схеме (рис. 1) направление вращения правое.Рис. 1. Электрическая схема подключения электродвигателей типа ДСП-10 Исполнение по способу монтажа IМ4481 по ГОСТ 2479-79. Защита от воды отсутствует. Сопротивление изоляции обмоток относительно корпуса составляет не менее: 100 МОм - в практически холодном состоянии двигателя; 10 МОм - при повышенной рабочей температуре среды или в нормальных климатических условиях при тепловом равновесии двигателей; 1 МОм - при повышенной влажности воздуха и практически холодном состоянии двигателей. Изоляция обмоток относительно корпуса выдерживает без пробоя и перекрытия в нерабочем состоянии воздействие испытательных напряжений (действующее значение): 500 В (у двигателей типов ДСП-10 и ДСП-25), 700 В (у двигателей типов ДСП-60 и ДСП-120) - при практически холодном состоянии или при тепловом равновесии двигателей; 250 В (у двигателей типов ДСП-10 и ДСП-25), 350 В (у двигателей типов ДСП-60 и ДСП-120) - при повышенной влажности воздуха и практически холодном состоянии двигателей. Среднее квадратичное значение виброскорости 0,71 мм/с. Минимальная наработка двигателей - 3000 ч. Минимальный срок службы - 12 лет. Минимальный срок сохраняемости при хранении двигателей в отапливаемом хранилище или вмонтированными в защищенной аппаратуре - 12 лет. При хранении двигателей в неотапливаемом помещении или вмонтированными в незащищенную аппаратуру срок сохраняемости сокращается в 3 раза. Хранение под навесом и на открытой площадке не допускается. Гарантийный срок эксплуатации - 12 лет. Гарантийная наработка в пределах гарантийного срока эксплуатации - 3000 ч. Гарантийный срок хранения - 12 лет. Электродвигатель представляет собой синхронную машину, на статоре которой расположена трехфазная обмотка. При подключении обмотки к сети в воздушном зазоре машины возникает вращающееся магнитное поле, которое перемагничивает активную часть неподвижного ротора. Вследствие явления магнитного запаздывания (гистерезиса) возникает электромагнитный момент, который увлекает ротор в сторону вращения поля. В тонкостенный стальной кожух завальцованы два стальных щита, между которыми установлен статор. Статор представляет собой пакет, набранный из листов электротехнической стали, в закрытые пазы которого уложена обмотка. Выводные концы обмотки припаяны к контактным клеммам. Ротор представляет собой вал с напрессованной на него немагнитной втулкой, на которую набран пакет из колец магнитотвердого сплава. Ротор динамически сбалансирован с помощью напрессованных на вал двух балансировочных колец; вращается в подшипниках. Электродвигатель с двух сторон закрыт фланцами с кольцевыми лабиринтовыми канавками, заполненными смазочным материалом. Габаритные, установочные и присоединительные размеры двигателей представлены на рис. 2.Рис. 2. Габаритные, установочные и присоединительные размеры синхронных гистерезисных электродвигателей типов ДСП-10, ДСП-25, ДСП-60, ДСП-120Табл. к рис. 2 В комплект поставки входят: двигатель и паспорт. Техническое описание и инструкция по эксплуатации поставляются в 2 экз. каждому заказчику с первой партией двигателей. Допускается оформление группового паспорта в соответствии с требованиями ГОСТ В 14000.0-78.Центр комплектации «СпецТехноРесурс»Все права защищены. |
laborant.ru
Изобретение относится к области машиностроения и может быть использовано преимущественно для уменьшения раскачивания груза на канате строительного крана. Устройство для гашения колебаний груза, подвешенного на канате строительного крана содержит корпус, внутри которого через подшипники, симметрично установленные относительно центральной вертикальной оси устройства, установлена с возможностью поворота относительно центральной поперечной горизонтальной оси устройства горизонтальная рама. На общем с горизонтальной рамой валу установлены редуктор прецессионного двигателя и тормоз. С горизонтальной рамой внутренним образом соединена вертикальная рама с возможностью поворота относительно центральной поперечной горизонтальной оси устройства. На общем с вертикальной рамой валу соосно установлены другие редуктор и тормоз, имеющие с вертикальной рамой общую ось, совпадающую с центральной продольной осью устройства. Вертикальная рама связана с асинхронным двигателем, имеющим с ней общую вертикальную ось. Внутри корпуса жестко закреплен датчик периода колебаний, а снаружи в верхней части корпуса закреплены подвеска, а в нижней - грузовой крюк. Технический результат - повышение эффективности гашения колебаний и расширение конструктивных особенностей. 1 з.п. ф-лы, 1 ил. 

Изобретение относится к области машиностроения и может быть использовано преимущественно для уменьшения раскачивания груза на канате строительного крана.
Известно изобретение - аэродинамический стабилизатор-наводчик груза подъемного крана (Журнал "Строительные и дорожные машины", 1998, №1, с.17-19), содержащий многолопастную воздушную крыльчатку с быстроходным электроприводом. На корпусе стабилизатора по окружности расположены всасывающие и выхлопные отверстия. Отверстия могут перекрываться заслонками с электромагнитным приводом. Устройство содержит также датчик углового отклонения от вертикали и микропроцессорный блок управления стабилизацией и наводкой. Стабилизатор-наводчик груза имеет инфракрасные детекторы для приема управляющих сигналов, излучаемых ручным пультом управления, который находится у монтажника. Гашение свободных колебаний груза и его перемещение в горизонтальной плоскости в определенных пределах достигается периодическим изменением направления вектора тяги воздушной крыльчатки стабилизатора. Стабилизатор навешивают на крюк крана как сменное оборудование или при длительном использовании крепят непосредственно к крюковой обойме. Для навешивания грузозахватных приспособлений в нижней части стабилизатора имеется стандартный крюк.
Аэродинамический стабилизатор-наводчик груза позволяет сократить скорость и время наводки и установки монтируемого блока в проектное положение.
Недостатками данного устройства является следующее.
1. Использование стабилизатора-наводчика груза преимущественно направлено на гашение колебаний груза при строительстве высотных сооружений.
2. Следует отметить значительную дороговизну устройства (8-10% от стоимости строительного крана).
3. Сложность конструкции.
Другим известным изобретением является поворотное грузозахватное устройство, выпускаемое фирмой "Пайнер" (ФРГ), содержащее асинхронный двигатель, статорная часть которого закреплена на валу, который через подпятник опирается на подвесную скобу, навешиваемую на переходное кольцо. В свою очередь, переходное кольцо навешивается на крюк каната строительного крана. Роторная часть электродвигателя закреплена в корпусе, опирающемся на вал через подшипники качения, а выходной конец последнего, выполненный в виде замкнутой петли, используется для навески собственно грузозахватного устройства для груза. Питание роторной части электроэнергией осуществляется через гибкий кабель и кольцевые токосъемники (Вайнсон А.А., Андреев А.Ф. Крановые грузозахватные устройства: Справочник. - М.: Машиностроение, 1982. - С.40-41).
Поворотное устройство позволяет ориентировать монтируемый груз в необходимое положение.
Недостатками изобретения является следующее.
1. Невозможность стабилизировать раскачивание груза в вертикальной плоскости.
2. Отсутствие в устройстве автоматического регулирования процессом уравновешивания груза на канате строительного крана.
Наиболее близким к предлагаемому изобретению относится устройство для гашения колебаний груза, подвешенного на канате строительного крана, содержащее асинхронный двигатель, вращающийся относительно вертикальной оси, статорная часть которого жестко закреплена на валу, опирающемся через подпятник на подвесную скобу, связанную через переходное кольцо с крюком крана, а роторная часть, питание которой осуществляется через гибкий кабель и кольцевые токосъемники, закреплена в корпусе, опирающемся на вал через подшипники качения, причем выходной конец вала выполнен в виде замкнутой петли для навески груза; на валу установлен дополнительно асинхронный двигатель с возможностью вращения вала в сторону, противоположную вращению первого асинхронного двигателя, на корпусах асинхронных двигателей жестко закреплены расположенные взаимно перпендикулярно в горизонтальной плоскости две пары металлических стержней, на которых с возможностью перемещения по ним установлены грузила, при этом датчик углового отклонения груза от вертикали через микропроцессорный блок управления соединен с асинхронными двигателями (Патент РФ №2224708 от 27.02.04 г., М. кл. В 66 С 13/06).
Недостатками данного изобретения является следующее.
1. Масса подвешиваемого груза ограничивает прецессионное движение вала.
2. В устройстве отсутствует датчик периода колебаний, необходимый для управления длительностью прецессии.
3. Использование второго асинхронного двигателя влечет за собой увеличение массы конструкции устройства и его стоимость.
Задачей изобретения является повышение эффективности гашения колебаний в двух взаимно перпендикулярных вертикальных плоскостях за счет расширения его конструктивных особенностей.
Поставленная задача достигается тем, что
1. Устройство для гашения колебаний груза, подвешенного на канате строительного крана, содержащее асинхронный двигатель, вращающийся относительно вертикальной оси, и датчик углового отклонения груза от вертикали, связанный с микропроцессорным блоком управления, содержит корпус, внутри которого через подшипники, симметрично расположенные относительно центральной вертикальной оси устройства, установлена с возможностью поворота относительно центральной поперечной горизонтальной оси устройства горизонтальная рама, на общем с горизонтальной рамой валу соосно установлены редуктор прецессионного электродвигателя и тормоз, причем с горизонтальной рамой внутренним образом шарнирно соединена вертикальная рама посредством подшипников, симметрично расположенных относительно центральной поперечной горизонтальной оси, с возможностью поворота относительно центральной продольной горизонтальной оси устройства, на общем с вертикальной рамой валу соосно установлены другие редуктор прецессионного электродвигателя и тормоз, имеющие с вертикальной рамой общую ось, совпадающую с центральной продольной горизонтальной осью устройства, а также вертикальная рама связана с упомянутым асинхронным двигателем, имеющим с ней общую вертикальную ось.
2. Устройство по п.1 содержит внутри корпуса жестко закрепленый датчик периода колебаний, а снаружи корпуса в верхней его части жестко закреплены подвеска, а в нижней - грузовой крюк.
Новые существенные признаки.
1. Устройство содержит корпус.
2. Внутри корпуса установлена с возможностью поворота относительно центральной поперечной горизонтальной оси устройства горизонтальная рама.
3. Горизонтальная рама установлена через подшипники, симметрично расположенные в стенках корпуса относительно центральной вертикальной оси устройства.
4. На общем с горизонтальной рамой валу установлены редуктор прецессионного электродвигателя и тормоз.
5. Вал, редуктор, прецессионный электродвигатель и тормоз имеют с горизонтальной рамой общую ось, совпадающую с центральной поперечной горизонтальной осью устройства.
6. Вертикальная рама установлена внутри горизонтальной рамы посредством подшипников с возможностью поворота относительно центральной продольной горизонтальной оси устройства.
7. Подшипники расположены на горизонтальной раме симметрично относительно центральной поперечной горизонтальной оси устройства.
8. На общем с вертикальной рамой валу установлены другие редуктор прецессионного электродвигателя и тормоз.
9. Вал, редуктор, прецессионный двигатель и тормоз имеют с вертикальной рамой общую ось, совпадающую с центральной продольной горизонтальной осью устройства.
10. Вертикальная рама связана с асинхронным двигателем, имеющим с ней общую вертикальную ось.
11. Внутри корпуса жестко закреплен датчик периода колебаний.
12. Снаружи корпуса в верхней его части жестко закреплены подвеска, а в нижней - грузовой крюк.
Перечисленная совокупность признаков обеспечивает получение технического результата во всех случаях, на которые распространяется испрашиваемый объем правовой охраны.
Технический результат обеспечивается наличием в устройстве горизонтальной и вертикальной рам с асинхронным двигателем, установленным в последней. Величина, направление и длительность принудительной прецессии асинхронного двигателя определяется датчиками угла и периода колебаний грузового подвеса и осуществляется прецессионными электродвигателями по командам микропроцессорного блока. С помощью жестко закрепленной снаружи верхней части корпуса подвески устройство навешивается на грузозахватный орган крана, а жестко закрепленный снаружи корпуса в его нижней части грузовой крюк предназначен для навешивания перемещаемого груза.
Устройство для гашения колебаний груза, подвешенного на канате строительного крана, изображено на фиг.1 - схема общего вида устройства.
Устройство содержит корпус 1, в котором через подшипники 2, симметрично расположенные относительно центральной вертикальной оси 3 устройства, установлена с возможностью поворота относительно центральной горизонтальной оси 4 устройства горизонтальная рама 5. Снаружи корпуса 1 на общем с горизонтальной рамой 5 валу 6 соосно установлены редуктор 7 прецессионного электродвигателя 8 и тормоз 9. С горизонтальной рамой 5 внутренним образом шарнирно связана вертикальная рама 10 посредством подшипников 11, расположенных на горизонтальной раме 5 симметрично относительно центральной поперечной горизонтальной оси 4 устройства. Вертикальная рама 10 установлена с возможностью поворота относительно центральной продольной горизонтальной оси 12 устройства. На общем с вертикальной рамой 10 валу 13 соосно установлены: редуктор 14 прецессионного электродвигателя 15 и тормоз 16, имеющие с последней общую ось, совпадающую с центральной продольной горизонтальной осью 12 устройства. Вертикальная рама 10 подвижно связана через подшипники 17 с асинхронным двигателем 18, имеющим с ней общую вертикальную ось 3. Внутри корпуса 1 жестко закреплены датчик угла 19, датчик периода колебаний 20 и микропроцессорный блок 21. Снаружи корпуса 1 в верхней его части жестко закреплены подвеска 22, а в нижней - грузовой крюк 23.
Устройство работает следующим образом.
Гашение колебаний груза происходит автоматически по команде микропроцессорного блока 21, обрабатывающего сигналы датчиков угла 19 отклонения груза от вертикали и датчика периода колебаний 20. В зависимости от того, в какую сторону произошло отклонение груза от вертикали, автоматически приводятся в действие электродвигатели 8 и (или) 15 в сторону прецессии.
При отклонении грузового подвеса на угол  относительно оси 3 прецессия вертикальной рамы 10 с асинхронным двигателем 18 создается через редуктор 14 прецессионным электродвигателем 15, управляемым микропроцессорным блоком 21, обрабатывающим сигналы датчика угла 19 и датчика периода колебаний 20. Одновременно по сигналу микропроцессорного блока 21 растормаживается тормоз 16 вала 13 вертикальной рамы 10. Следствием прецессионного движения вертикальной рамы 10 с асинхронным двигателем 18 является гироскопический стабилизирующий момент.
относительно оси 3 прецессия вертикальной рамы 10 с асинхронным двигателем 18 создается через редуктор 14 прецессионным электродвигателем 15, управляемым микропроцессорным блоком 21, обрабатывающим сигналы датчика угла 19 и датчика периода колебаний 20. Одновременно по сигналу микропроцессорного блока 21 растормаживается тормоз 16 вала 13 вертикальной рамы 10. Следствием прецессионного движения вертикальной рамы 10 с асинхронным двигателем 18 является гироскопический стабилизирующий момент.
Когда угол прецессии вертикальной рамы 10 от среднего положения достигнет предельного значения  =(30÷60)°, электродвигатель 15 отключается через микропроцессорный блок 21. Одновременно включается тормоз 16.
=(30÷60)°, электродвигатель 15 отключается через микропроцессорный блок 21. Одновременно включается тормоз 16.
По окончании четверти периода колебаний датчик периода колебаний 20 сообщает сигнал на микропроцессорный блок 21, который формирует управляющие сигналы тормозу 16 и электродвигателю 15. Последний начинает вращаться в обратную сторону и по окончании полупериода колебаний приведет ось асинхронного двигателя 18 в вертикальное положение.
При отклонении грузового подвеса на угол в плоскости осей 3 и 4 (вокруг оси 12) прецессия горизонтальной рамы 5 с асинхронным двигателем 18, закрепленным в вертикальной раме 10, создается через редуктор 7 электродвигателем 8, управляемым микропроцессорным блоком 21, обрабатывающим сигналы датчика угла 19 и периода колебаний 20. Одновременно по сигналу микропроцессорного блока 21 растормаживается тормоз 9 вала 6 вертикальной рамы 10. Следствием прецессионного движения горизонтальной рамы 5 с асинхронным двигателем 18 является гироскопический стабилизирующий момент.
Когда угол прецессии горизонтальной рамы 5 от среднего положения достигнет предельного значения =(30÷60)°, электродвигатель 8 отключается микропроцессорным блоком 21. Одновременно включается тормоз 9.
По окончании четверти периода колебаний датчик периода колебаний 20 дает сигнал на микропроцессорный блок 21, который формирует управляющие сигналы тормозу 9 и электродвигателю 8. Последний начинает вращаться в обратную сторону и по окончании полупериода колебаний приведет ось 3 асинхронного двигателя 18 в вертикальное положение.
Перечень позиций на чертеже к заявке
УСТРОЙСТВО ДЛЯ ГАШЕНИЯ КОЛЕБАНИЙ ГРУЗА, ПОДВЕШЕННОГО НА КАНАТЕ СТРОИТЕЛЬНОГО КРАНА
1 - корпус;
2 - подшипники;
3 - ось устройства центральная вертикальная;
4 - ось устройства центральная поперечная горизонтальная;
5 - рама горизонтальная;
6 - вал;
7 - редуктор;
8 - электродвигатель прецессионный;
9 - тормоз;
10 - рама вертикальная;
11 - подшипники;
12 - ось устройства центральная продольная горизонтальная;
13 - вал;
14 - редуктор;
15 - электродвигатель прецессионный;
16 - тормоз;
17 - подшипники;
18 - двигатель асинхронный;
19 - датчик угла;
20 - датчик периода;
21 - подвеска;
22 - крюк грузовой.
1. Устройство для гашения колебаний груза, подвешенного на канате строительного крана, содержащее асинхронный двигатель, вращающийся относительно вертикальной оси, и датчик углового отклонения груза от вертикали, связанный с микропроцессорным блоком управления, отличающееся тем, что содержит корпус, внутри которого через подшипники, симметрично расположенные относительно центральной вертикальной оси устройства, установлена с возможностью поворота относительно центральной поперечной оси устройства горизонтальная рама, на общем с горизонтальной рамой валу соосно установлены редуктор прецессионного электродвигателя и тормоз, причем с горизонтальной рамой внутренним образом шарнирно соединена вертикальная рама посредством подшипников, симметрично расположенных относительно центральной поперечной горизонтальной оси устройства, на общем с вертикальной рамой валу соосно установлены другие редуктор прецессионного электродвигателя и тормоз, имеющие с вертикальной рамой общую ось, совпадающую с центральной продольной горизонтальной осью устройства, а также вертикальная рама связана с упомянутым асинхронным двигателем, имеющим с ней общую вертикальную ось.
2. Устройство по п.1, отличающееся тем, что внутри корпуса жестко закреплен датчик периода колебаний, а снаружи корпуса в верхней его части жестко закреплены подвеска, а в нижней - грузовой крюк.
www.freepatent.ru










