





Рассмотрим, как производится установка моторов и регуляторов (ESC) на раму, а также подключение их к контроллеру APM. Операция простая и интересная. Приступим!
Первым делом нам надо подумать, как будем подключать моторы к регуляторам. Я использую разъемы Bullet Banana Connector 3.5mm, типа таких:

Bullet Banana Connector 3.5mm
По одним данным допускают ток до 50А, по другим 80А. Штекер «папа» я паяю со стороны моторов, гнездо «мама» со стороны регуляторов. Если используете разъемы, то их необходимо подобрать по параметрам. Слабое звено в применении этих разъемов — это две дополнительные точки пайки, где появляется дополнительная вероятность отказа. Поэтому имеется много рекомендаций не использовать разъемы от регуляторов до моторов.
Далее установим моторы на раму. В моем случае используется пластиковая рама, клон DJI F450. Места под крепление моторов уже имеются. Моторы крепятся четырьмя винтами, входящими в комплект. Дальше крепим регуляторы кому как удобно (сверху рамы, снизу рамы, внутри между пластинами и т.д.). Мне удобно крепить регуляторы снизу лучей рамы на нейлоновых стяжках.
Далее необходимо разобраться, как осуществляется выбор направления вращения мотора. Можно все три провода подключить «один к одному» и задать направление настройкой в регуляторе, а можно воспользоваться способом смены мест двух проводов (любых), идущих на мотор. Этот способ более быстрый и простой и не требует выполнения дополнительной процедуры настройки регулятора (либо сигналами, либо картой программирования).
Регуляторы лучше использовать с адаптированной прошивкой под мультикоптеры, которые при ее применении обычно не требуют дополнительной настройки. Мною используются регуляторы RCTimer SK-30A с прошивкой SimonK. Для прошивки потребуется следующий материал:
Для других прошивок придется воспользоваться поиском, чтобы найти инструкции или обсуждения.
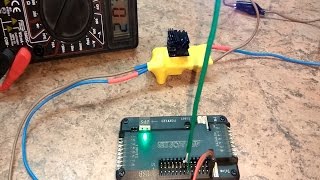
Проверим направление вращения. Самый простой способ можно организовать, собрав «стенд», состоящий из приемника, мотора, регулятора и аккумулятора. Разъем с управляющим сигналом подключаем к 3 каналу приемника, питание приемника осуществляется от регулятора, питание регулятора от аккумулятора. Важно соблюдать полярность. Проверка проводится со СНЯТЫМИ пропеллерами. Подаем немного «газа» и смотрим, куда начинает вращаться мотор. Помечаем или запоминаем. Остальные моторы подключаем и аналогично проверяем направление вращения.
Далее необходимо правильно учесть направление вращения моторов для конкретного типа рамы. Рассмотрим подключение моторов и регуляторов к контроллеру APM для квадрокоптера и гексакоптера (IMHO самые распространенные).

Подключение для квадрокоптера + или X конфигурации

Подключение для гексакоптера + или X конфигурации
Информацию по подключению для других типов рам можно посмотреть на официальной WiKi Arducopter.
Производим необходимые подключения проводов от регуляторов к каналам контроллера. Важно учесть необходимость (или ее отсутствие) использования плюсового (+5V, центральный) провода от регулятора. Об этом описано в статье «Идеальное питание для APM». Если питание берем от одного регулятора, то необходимо плюсовой провод оставить только от одного регулятора, а остальные извлечь из колодки BLS и изолировать, а так же необходимо установить перемычку JP1. Если используется Power Module или питание берется от отдельного BEC (Battery Eliminator Circuit) и подается со стороны Inputs, то тогда необходимо использовать только сигнальные провода (с колодок регуляторов извлечь все плюсовые и минусовые провода) и не использовать перемычку JP1 (для уточнения см. статью о питании). Если применяются регуляторы OPTO, то минусовые провода необходимы.
Далее располагаем и закрепляем провода удобным способом. Если решили использовать разъемы, то необходимо обеспечить хорошую изоляцию. Я использую для этих целей термоусадочную трубку (ТУТ) подходящего диаметра. Также креплю разъемы со смещением относительно друг друга.
Берем в руки пропеллеры, разбираемся какой из них «левый», а какой «правый». Устанавливать на моторы их пока не нужно.

Направление вращения пропеллеров
После всех этих операций должно получиться приблизительно как на фото:

Вращение по часовой стрелке

Вращение против часовой стрелки
Монтаж и подключение моторов с регуляторами выполнили. Пока что запускать моторы с использованием контроллера APM нельзя, потомучто еще необходимо выполнить ряд настроек и проверок. Если пропеллеры поставили, то далее их необходимо СНЯТЬ! Теперь можно переходить к калибровке регуляторов.
Если вы нашли ошибку на странице, то нажмите Shift + Enter или нажмите здесь, чтобы уведомить нас.
apmcopter.ru
Подключите сигнальные контакты радиоприемника "S" (сигнал) c контактыми "S" на входы APM, используя для этого специальный кабель. Если у Вас имеется трехжильный кабель, то первый канал приемника и APM необходимо подключить именно им, это даст возможность запитать радиоприемник, а остальные канали можно подключить только контактом "S", это даст небольшое преимущество компактности и веса. ссылка на подробности Power и важных предупреждений.

Если вы желаете использовать PPM сигнал , то вам необходимо перемычкой замкнуть 2 и 3 сигнальные каналы на APM и по первому каналу подать PPM сигнал из радиоприемника.


Если у вас имеется распределительная плата питания PDB , то можно подключить питание и сигнальные кабели через неё.
 Конфигурация квадрокоптер H рама
Конфигурация квадрокоптер H рама  Конфигурация трикоптер
Конфигурация трикоптер  Конфигурация гексакоптер и октакоптер
Конфигурация гексакоптер и октакоптер  Конфигурация трикоптер Y6
Конфигурация трикоптер Y6  Конфигурация квадрокоптер X8
Конфигурация квадрокоптер X8 
Совершенно очевидно , как показано ниже на картинке определить направление пропеллера для правильного соединения его к правильному двигателю. Задача состоит в том, что бы воздушный поток позволял квадрокоптеру отталкиваться от земли.

Если вы завершили калибровку Радиоаппаратуры и регуляторов ESC , то вы можете проверить, что ваши моторы вращаются в правильном направлении: Примечание: Направление моторов устанавливается просто перестановкой двух из трех проводов от регулятора ESC.
Альтернативный способ проверить, что двигатели были правильно подключили заключается в использовании команды "Motors" в CLI Mission Planner. Примечание: Направление моторов устанавливается просто перестановкой двух из трех проводов от регулятора ESC.
Теперь Двигатели будут вращаться в последовательности, каждый двигатель будет вращаться в течение 1 секунды при очень низкой скорости, а затем остановится. Вращение следующего двигателя начнется после 2 или 3 секундной задержки. Пожалуйста, соблюдайте направление вращения для каждого двигателя, а также, что двигатели вращаются один за другим.
Первый вращающийся двигатель будет тот , который расположен впереди в случае конфигурации +, или первым двигателем справа спереди в случае конфигурации X. Тест двигателей будет идти по часовой стрелке.
В случае конфигурации типа X8, квадрокоптер будет вращать сначало верхний передний правый двигател, затем нижний передний правый, и далее вокруг по часовой стрелке, по схеме.
После завершения теста вращения будет 4 или 5 секундная пауза до повтора.
Когда вы убедитесь , что тест проходит правильно:
видео по настройке
ardupilot-mega.ru

Как правильно подключить двигатели к полетному контроллеру. Продолжение проекта Чужой. Провода - https://goo.gl/FH...

How to connect motors and ESC to APM ? 0:03 - connecting ESC to APM 0:40 - stretch the wires to the...

Комплект для сборки квадрокоптера: Квадрокоптер на раме S500: https://goo.gl/TiaM5U Квадрокоптер на раме F450:...

Как настроить FlySky FS-i6 / Turnigy TGY-i6 с прошивкой 10ch Mod для контроллера APM 2.6 / 2.8 Настройка полётных режимов и Radio...

Комплект для сборки квадрокоптера: Квадрокоптер на раме S500: https://goo.gl/TiaM5U Квадрокоптер на раме F450:...

Обычное питание 5V от регуляторов частоты вращения двигателей подвело, ставим отдельный DC-DC стабилизатор...

APM- модуль подготовки воздуха. Используется на грузовых автомобилях Renault и Volvo. В данном видео мы будем прово...

Как и чем запитать полетный контроллер квадрокоптера, чтобы работал стабильно и надежно. Модуль питания...

Группа Вконтакте: https://vk.com/club73909783 Подключение,прошивка и настройка полетного контроллера APM 2.6. Ссылка на...

Балансировать моторы и пропеллеры имеет смысл на всех моделях. Но наиболее чувствительны к дисбалансу...

Полезный сайт по APM http://ardupilot-mega.ru/ Ссылка на Mission Planner http://goo.gl/uciqZh Комплект для сборки квадрокоптера http://fas.st/Dk...

How to install the motors that have different nut thread? RadioLink AT9 Mode 2 http://goo.gl/5Sh6pA...

Подробности в статье: http://www.parkflyer.ru/71910/blogs/view_entry/3127/

Группа ВК:https://vk.com/generalgarlic Поддержка развития канала: карта приват банка 5168 7554 2348 4159 Кошелек webMoney U085780550087.
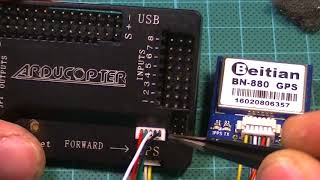
Настройка касательно версии 2,8 так как в версии 2,5 или 2,6 расположение контактов GPS модуля и подключения...

Сборка квадрокоптера своими руками на раме F450 из китайских комплектующих и первые полёты. ➥ Бюджетный...

Продолжение: https://youtu.be/z7ntLTxSKJU Ссылки на комплектующие: Рама S500: https://goo.gl/bLLwCg Полётный контроллер...
Устанавливаем и настраиваем apm 2.6 под летающее крыло. Электроника ЛК(НАЖМИ ЕЩЕ): Контроллер apm - http://ali.pub/6r5hk...

5% скидка на покупку чего угодно в томтоп - VE5OFF MicroOSD - https://goo.gl/AbvmQK 1045 Carbon - https://goo.gl/vSSVW8 FPV Mount ...
Комплект для сборки квадрокоптера: Квадрокоптер на раме S500: https://goo.gl/TiaM5U Квадрокоптер на раме F450:...

Продолжаем сборку нашего квадрокоптера. А часть первая тут:https://www.youtube.com/watch?v=YpjNDHv0ipI Это видео - подробное...

Комплект для сборки квадрокоптера: Квадрокоптер на раме S500: https://goo.gl/TiaM5U Квадрокоптер на раме F450:...
![Квадрокоптер своими руками [Часть 1 - сборка и подключение]](/800/600/https/i.ytimg.com/vi/oYB5XStjWKs/mqdefault.jpg)
В этом выпуске покажу вам как сделать квадрокоптер своими руками. Будем собирать готовый китайский кит...

Может быть у кого то и не было столько проблем как у меня с APM, хочу вас поздравить! У меня же были пролемы...

Комплект для сборки квадрокоптера: Квадрокоптер на раме S500: https://goo.gl/TiaM5U Квадрокоптер на раме F450:...

подключение безколлекторного двигателя - теперь это стало очень просто - инструкция достаточно подробная.

030 Сборка и подключение Поворотная платформа FPV + серво двигатели SG90 FPV dedicated nylon PTZ + 2pcs 9G servos SG90 Разверни опис...

Всем привет, в этом видео мы рассмотрим и подключим подвес Storm 32 - покупал подвес здесь https://goo.gl/AGn0D9 - моя каме...

Проверяем двигатели на вибрацию, подключаем и правильно устанавливаем на раму. подключаем полетный контро...

Квадрокоптер -http://ali.pub/29s9dh Пропелеры-http://ali.pub/29s9jp Пищялка-http://ali.pub/29s9ns Держатель для камеры -http://ali.pub/29s9r3...

Покупал ЗДЕСЬ: . AliExpress Магазин:Ready to sky http://ali.pub/8sl1k 2212 920KV http://ali.pub/ar2hu 10x4.5 CW/CCW http://ali.pub/i7bud Углеродного ...

В этом ролики я расскажу про идеальнейшее питание для мозгов квадрокоптера. Линейный стабилизатор заказыв...

Комплект для сборки квадрокоптера http://fas.st/Dk4uq Простенький пульт управления http://fas.st/2rOOI Маленький и легкий...

Контроллер можно заказать по ссылке: http://megapilot.ru/index.php/katalog/ap/apm-2-5m3-classic Монитор: ...

Сборка квадрокоптера. В данном видео показано подключение регуляторов ESC к двигателям, установка платы...
КВАДРОКОПТЕР СВОИМИ РУКАМИ #3 #1 распаковка нужного - https://youtu.be/tqp_Hl4-4w0 #2 сборка рамы S500 - https://youtu.be/1gLRcPKp3Ok #4...
![Квадрокоптер своими руками [Часть 3 - балансировка и полёты]](/800/600/https/i.ytimg.com/vi/2VXztUspdzQ/mqdefault.jpg)
Продолжаем тему сборки квадрокоптера своими руками! В этом выпуске вас ждёт: ✓ Балансировка пропеллеров...
Промо ролик поверхностных моноблочных насосов Акварио (Aquario) серии APM.

Сборка квадрокоптера на раме X500. В данном видео показано как загрузить прошивку на плату APM 2.6, провести...

Комплектующие для квадрокоптера на APM. Сборка и полет =)Покупал все на flymod.net Я во ВКонтакте - https://vk.com/xp_re Груп...
pou mod reggae minecraft 1.9 pirata patch bmpes pes 2016 minecraft 1.9 download pirata pacote office download crackeado brasfoot 2016 ligas hard reset lg e415f serial idm 6.25 pokemon glazed detonado o origin nao esta sendo executado no momento the sims 4
debojj.net
Как правильно подключить двигатели к полетному контроллеру. Продолжение проекта Чужой. Провода - https://goo.gl/FH...

КВАДРОКОПТЕР СВОИМИ РУКАМИ #4 Необходимые файлы - https://yadi.sk/d/CnC_UsTIqj7iU #1 распаковка нужного - https://youtu.be/tqp_Hl4-4w0...
Полезные ссылки: Ardupilot APM 2.8 - http://ali.ski/kqwaX Ardupilot APM 2.6 - http://ali.ski/UETw4o Виброразвязка оба варианта - http://ali.ski/DMkQS6...
Настройка касательно версии 2,8 так как в версии 2,5 или 2,6 расположение контактов GPS модуля и подключения...
Сборка квадрокоптера своими руками на раме F450 из китайских комплектующих и первые полёты. ➥ Бюджетный...
Группа Вконтакте: https://vk.com/club73909783 Подключение,прошивка и настройка полетного контроллера APM 2.6. Ссылка на...
Подробная инструкция по сборке стабилизатора напряжения для питания APM (ArduPilot Mega) и Pixhawk. Идея взята из...

Я в ВК-----https://vk.com/ya_dom_2 Сборка квадрокоптера на раме F450. Ч.3 Установка APM 2.8 ...
Может быть у кого то и не было столько проблем как у меня с APM, хочу вас поздравить! У меня же были пролемы...
Обычное питание 5V от регуляторов частоты вращения двигателей подвело, ставим отдельный DC-DC стабилизатор...

GPS Ublox NEO-M8N + APM 2.6 ✈️Buy✈ Ublox NEO-M8N https://goo.gl/uHqRsq ...
Полезный сайт по APM http://ardupilot-mega.ru/ Ссылка на Mission Planner http://goo.gl/uciqZh Комплект для сборки квадрокоптера http://fas.st/Dk...

In this video, I show you how to connect the receiver RadioLink AT9-R9D to a controller APM. RadioLink...

Устанавливаем и настраиваем apm 2.6 под летающее крыло. Электроника ЛК(НАЖМИ ЕЩЕ): Контроллер apm - http://ali.pub/6r5hk...

APM 2.6 3DR Радио телеметрия 915MHz модуль для APM APM2, просто подключение и проверка на работоспособность. Обновил...
How to connect motors and ESC to APM ? 0:03 - connecting ESC to APM 0:40 - stretch the wires to the...
Продолжаем разбираться с китайским КИТом квадрокоптера на контроллере APM (Arducopter), в прошлом выпуске я показ...

Ссылка на ВЕC ...

Comprar apm aquí: https://chollo.info/2HfNECd Lista de piezas para montar drone barato en la descripción del video. Montando la placa Ardupilot APM 2.8 y el ...


Connection RadioLink AT9 Mode 2 http://goo.gl/5Sh6pA RadioLink AT9 Mode 1 http://goo.gl/TGHq7H...

Consider supporting the channel by visiting www.patreon.com/painless360 See my playlist for all the videos in the series ...
Как и чем запитать полетный контроллер квадрокоптера, чтобы работал стабильно и надежно. Модуль питания...

В этом видео я рааскажу как установить новый контроллер apm и радио телеметрию на квадрокоптер cheerson cx-20. квад...
5% скидка на покупку чего угодно в томтоп - VE5OFF MicroOSD - https://goo.gl/AbvmQK 1045 Carbon - https://goo.gl/vSSVW8 FPV Mount ...

Испытание авто миссии APM, полностью автоматический взлет, проход по маршруту, и посадка.

Reviewing wiring schematic and hook up wires for the Ardupilot Mega 2.6 to the EZUHF Receiver. We connect the cables for the 3DR Telemetry Radio and ...
Как настроить FlySky FS-i6 / Turnigy TGY-i6 с прошивкой 10ch Mod для контроллера APM 2.6 / 2.8 Настройка полётных режимов и Radio...
Hello everyone welcome in Ocean Of Tech and Im shahzeb khan today In this video I explained about configuring the APM with mission planner software.

Для перепрошивки PPM энкодера есть хорошая инструкция: http://apmcopter.ru/apm/apm-setup/proshivaem-ppm-encoder.html Прошивка SBUS режима:...

Connecting 2-axis gimbal to flight controller APM RadioLink AT9 Mode 2 http://goo.gl/5Sh6pA RadioLin...

APM 2.6 прошивка ArduCopter v3.2.1 Quad, калибровка Параметр: ahrs gps gain 1-0 http://apmcopter.ru/apm/apm-help/bug/padenie-na-proshivke-3-1-2.html ...


Комплект телеметрии для Cheerson CX20 и APM контроллеров. ▻ 3DR Radio Telemetry Kit http://bit.ly/1MLTaDd ▻CNDirect Homepage ...

In this video we go through the process of getting the flight battery voltage to display on the OSD. The parameters are configured in the Ardupilot Mega 2.6 to ...
Easy!

Video describing how to configure the hardware side of the external compass setup. Hope this helps. If you have any more questions about the board please ...

Шаг 2 в настройке контроллера APM 2.6 - загрузка файла конфигурации в GPS U-BLOX NEO-6M Всё ПО на: https://yadi.sk/d/4ZyJyCmeeduTY...

Learn More: http://www.mygeekshow.com/beginnertoexpert/topics/tutorials/How_to_Connect_RC_Equipment_to_your_APM.html On this video I'll demonstrate ...
how to pronounce cirno adios mi general lyrics ??? ???? ????? scp vs motioninjoy how to get simcity 5 for free ndev gms trainer sky factory clay minecraft low spec shaders ftb infinity evolved nuclear reactor rope constraint roblox
debojj.net
Подключите сигнальные контакты радиоприемника "S" (сигнал) c контактыми "S" на входы APM, используя для этого специальный кабель. Если у Вас имеется трехжильный кабель, то первый канал приемника и APM необходимо подключить именно им, это даст возможность запитать радиоприемник, а остальные канали можно подключить только контактом "S", это даст небольшое преимущество компактности и веса. ссылка на подробности Power и важных предупреждений.
Если вы желаете использовать PPM сигнал , то вам необходимо перемычкой замкнуть 2 и 3 сигнальные каналы на APM и по первому каналу подать PPM сигнал из радиоприемника.
Если у вас имеется распределительная плата питания PDB , то можно подключить питание и сигнальные кабели через неё.
Конфигурация квадрокоптер H рама Конфигурация трикоптер Конфигурация гексакоптер и октакоптер Конфигурация трикоптер Y6 Конфигурация квадрокоптер X8 Совершенно очевидно , как показано ниже на картинке определить направление пропеллера для правильного соединения его к правильному двигателю. Задача состоит в том, что бы воздушный поток позволял квадрокоптеру отталкиваться от земли.
Если вы завершили калибровку Радиоаппаратуры и регуляторов ESC , то вы можете проверить, что ваши моторы вращаются в правильном направлении: Примечание: Направление моторов устанавливается просто перестановкой двух из трех проводов от регулятора ESC.
Альтернативный способ проверить, что двигатели были правильно подключили заключается в использовании команды "Motors" в CLI Mission Planner. Примечание: Направление моторов устанавливается просто перестановкой двух из трех проводов от регулятора ESC.
Теперь Двигатели будут вращаться в последовательности, каждый двигатель будет вращаться в течение 1 секунды при очень низкой скорости, а затем остановится. Вращение следующего двигателя начнется после 2 или 3 секундной задержки. Пожалуйста, соблюдайте направление вращения для каждого двигателя, а также, что двигатели вращаются один за другим.
Первый вращающийся двигатель будет тот , который расположен впереди в случае конфигурации +, или первым двигателем справа спереди в случае конфигурации X. Тест двигателей будет идти по часовой стрелке.
В случае конфигурации типа X8, квадрокоптер будет вращать сначало верхний передний правый двигател, затем нижний передний правый, и далее вокруг по часовой стрелке, по схеме.
После завершения теста вращения будет 4 или 5 секундная пауза до повтора.
Когда вы убедитесь , что тест проходит правильно:
видео по настройке
ardupilot-mega.ru
Питание от одного источника
| Power Options | Номинальное напряжение | Макс напряжение | JP1 есть/нет |
|
Питание от BEC на выходах (output) |
5.37V +-0.5 | 6V | JP1 есть |
Питание от двух источников
| Power Options | Номинальное напряжение | Макс напряжение | JP1 есть/нет |
| Питание от BEC на выходах (output) | 5.00V +-0.5 | 6V | JP1 нет |
| Питание на входы (input) | 5.00V +-0.25 | 5.5V | JP1 нет |
Питание от модуля питания
Размыкаем JP1 и подключаем модуль питания (6ти пиновый провод)
К сведению: Если перемычки JP1 нет (разомкнут), требуется раздельное питание на входе и выходе APM, т.е. на выходах обычно на 3м ставится регулятор с UBEC который дает питание сервомеханизмам, а на входе BEC будет питать саму плату.
Внимание: Не превышайте максимальное напряжение!!! Превышение влечет повреждение APM.
Внимание: Подключая USB кабель к APM с подключенной батареей питания к BEC, регулятору с UBEC опасайтесь всплеска/увеличения напряжения, которое сможет привысить максимальный допустимый предел и вызвать повреждения платы Просто отключите любое питание от APM при подключении к USB.
Подсказка 1: если используете питание от Power Module, JP1 оставляйте разомкнутым воизбежании превышения максимального напряжения питания платы при подсоединении USB кабеля
Подсказка: APM2 с подключенным приемником, если замкнуть JP1, отключить любое питание от платы (модуль питания, BEC) и подключить с помощью USB провода к ПК, то работать будет и приемник. Т.е. включив пульт передатчика Вы сможете видеть движение стиков в Mission planner в разделе Radio calibtarion.
ВНИМАНИЕ: Читайте внимательнее, задавайте вопросы с комментариях. ПОМНИТЕ что плата ардупилота ВАША и Вы ответственны за то, чтоб ее не сжечь.
www.hellhog.ru










