ЭЛЕКТРИЧЕСКИЙ ПРИВОД
После вхождения синхронного двигателя в синхронизм его скорость при изменениях момента нагрузки на валу до некоторого максимального значения Мтах остается постоянной и равной синхронной скорости
Так как изменение числа пар полюсов zp у серийно выпускаемых
двигателей не применяется, то частотное регулирование является практически единственным способом регулирования угловой скорости синхронных двигателей. Оно характеризуется в основном такими же показателями, что и частотное регулирование скорости асинхронных двигателей с короткозамкнутым ротором. Это регулирование плавное, двухзонное. Диапазон регулирования вверх от номинальной синхронной скорости ограничивается механической прочностью ротора, его балансировкой и качеством подшипников. Диапазон регулирования вниз от номинальной синхронной скорости может достигать значений D = 1: (50 - т-100) и более с учетом абсолютной жесткости механических характеристик двигателя и обеспечения синусоидальности напряжения питания. Стабильность скорости высокая. Допустимая нагрузка при постоянном возбуждении и независимой вентиляции соответствует номинальному моменту.
Использование полупроводниковых преобразователей частоты открывает большие возможности в отношении формирования требуемых статических и переходных процессов частотно-регулируемых синхронных электроприводов.
В отличие от асинхронного короткозамкнутого двигателя при частотном регулировании скорости синхронный двигатель обладает тремя каналами управления моментом: изменением тока возбуждения /в, изменением напряжения обмоток статора Uj и изменением частоты f j
напряжения обмоток статора.
Механические характеристики производственных механизмов и электроприводов преобразователь частоты - синхронный двигатель для законов регулирования класса Uj jfj = const приведены на рис. 5.56.
| Рис. 5.56. Механические характеристики производственных механизмов и электроприводов преобразователь частоты - синхронный двигатель |
Рассмотренные законы управления при частотном регулировании скорости синхронного двигателя справедливы только в первом приближении, особенно для явнополюсного синхронного двигателя, так как неучет реактивного электромагнитного момента приводит к значительным (до 20 %) погрешностям механических свойств двигателя.
Синхронный двигатель обладает очень важным свойством - при подаче на статорные обмотки постоянного напряжения (/^ = 0) он создает тормозной момент при неподвижном роторе, обеспечивая механическую фиксацию ротора в заданном положении.
В частотно-регулируемых асинхронных электроприводах векторное управление связано как с изменением частоты и текущих значений переменных (напряжения, тока статора, потокосцепления), так и со взаимной ориентацией их векторов в декартовой системе координат. …
Сигналом тока можно воздействовать как на канал напряжения, так и на канал частоты. Функциональная схема электропривода с положительными обратными связями по току в канале регулирования напряжения и частоты приведена на …
Если вектор напряжения Uj формируется векторным сложением напряжения задания U з, и сигнала / • /^ • ккм, вводимого с целью компенсации падения напряжения в фазах А, В и С …
msd.com.ua
Типы приводов. Приводом компрессорной установки называется двигатель, который приводит в движение компрессор. В качестве двигателей компрессоров используются асинхронные и синхронные электродвигатели, двигатели внутреннего сгорания, паровые машины, газовые и паровые турбины, гидравлические машины. [c.31]
Наиболее часто приводом компрессорной установки являются электродвигатели. Синхронные электродвигатели имеют абсолютно жесткую характеристику и не допускают изменения частоты вращения ротора. Асинхронные двигатели с короткозамкнутым ротором, которые наиболее часто применяются для небольших компрессоров из-за своей дешевизны, также имеют жесткую характеристику. Изменение частоты вращения их роторов соответствует величине скольжения (2%), а это ничтожно мало. Асинхронные двигатели с фазным ротором при включении сопротивлений в цепь статора допускают в ограниченном диапазоне изменение частоты вращения, но работают на этих режимах неэкономично. Только электродвигатели постоянного тока имеют мягкую характеристику. На промышленных предприятиях, как правило, нет постоянного тока, а двигатели, питаемые от выпрямителей, сложны в эксплуатации, имеют большие энергетические потери и дороги. Все эти причины не позволяют широко использовать плавное изменение частоты вращения вала для изменения производительности компрессора. [c.293]
| Рис. 61. Схема агрегатной установки вальцов с приводом от тихоходного синхронного электродвигателя | 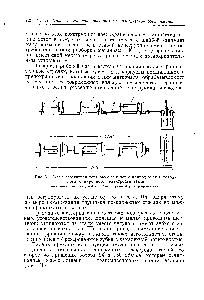 |
При установке синхронных электродвигателей во взрывоопасных помещениях генераторы тока возбужде- ния должны быть вынесены в специальное помещение. [c.138]
УСТАНОВКА СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ [c.75]
Привод предусматривает установку синхронного электродвигателя типа СДС-12-46-8, мощностью 300 квт и числом оборотов в минуту 750. [c.282]
В компрессорных и насосных установках наиболее широко применяются асинхронные с короткозамкнутыми роторами и синхронные электродвигатели. [c.74]
Условия работы токоприемников на технологических установках благоприятствуют высокому os ф, так как электродвигатели нагружены постоянно и равномерно. Данные обследований и проверок показывают, что средневзвешенное значение os ф технологических установок 0,8—0,9, т. е. в ряде случаев достигает нормативной величины, лежащей в пределах 0,9—0,92. Установки же, где os ф ниже 0,9, снижают величину его по предприятию в целом, что обусловливает оплату электроэнергии с надбавкой к основному тарифу. Поэтому возникает необходимость повышения среднего значения os ф, как минимум, до нормы. Это достигается применением статических конденсаторов и синхронных компенсаторов (синхронных электродвигателей), а также синхронных электродвигателей как приводов рабочих машин, параллельно со своей основной функцией повышающих os ф. [c.125]В компрессорных и насосных установках наиболее широко применяются асинхронные с короткозамкнутыми роторами и синхронные электродвигатели. Соединены эти двигатели с установками с помощью муфт, редукторов и клиноременной передачи. [c.232]
Принципиальная схема этих машин заключается в том, что многоколенчатый коренной вал укладывается на коренные подшипники оппозитной рамы, по обеим сторонам которой крепятся цилиндры. Таким образом, при вращении вала поршни либо движутся навстречу друг другу, либо в противоположные стороны (расходятся друг от друга), в результате чего возникающие инерционные силы почти полностью уравновешиваются. Хорошая уравновешенность оппозитных компрессоров позволяет увеличить скорость вращения вала в 2- -2,5 раза по сравнению со скоростью вращения горизонтальных машин. При этом масса электродвигателей для привода компрессоров, самих компрессоров и их размеры становятся значительно меньше. Кроме того, для установки оппозитных компрессоров требуется меньшая площадь машинного зала и небольшие фундаменты. Высокая частота вращения вала позволяет иметь небольшую маховую массу, которую можно разместить в роторе электродвигателя без дополнительного маховика. Для привода оппозитных компрессоров разработан ряд синхронных электродвигателей мощностью от 320 до 6300 кВт. [c.174]
На рис. 27, в показана схема коленчатого вала горизонтального компрессора. В средней части вала находится ротор синхронного электродвигателя. Оси всех подшипников вала должны быть расположены на горизонтальной прямой, в противном случае неизбежно расстройство подшипников и поломка вала. Необходимая в таких случаях точность установки достигается [c.52]
Горизонтальные компрессоры приводятся в движение чаще всего от синхронных электродвигателей, ротор которых установлен непосредственно на вал компрессора и выполняет роль маховика. В случае установки асинхронных электродвигателей применяют ременную передачу. [c.105]
Улучшение коэффициента мощности может быть достигнуто изъятием избыточной мощности и увеличением загрузки асинхронных электродвигателей и трансформаторов, являющихся главными потребителями реактивной мощности. Однако основным мероприятием по повышению коэффициента мощности является использование синхронных электродвигателей и установка статических конденсаторов. [c.190]
До включения синхронного электродвигателя нагрузка установки определялась мощностями Pi, Qi и Si. После включения синхронного электродвигателя активная мощность стала больше на величину Рсд, потребляемую при работе синхронного двигателя [c.300]
Реактивная мощность установки уменьшилась на величину Q d благодаря реактивной мощности, вырабатываемой синхронным электродвигателем [c.300]
Синхронные электродвигатели сложны в конструктивном отношении и в обслуживании, но экономичны в эксплуатации. В вентиляторных установках применять их целесообразно только в отдельных случаях (например, при наличии крупных осевых вентиляторов). [c.155]
Чем больше угловая скорость (меньше пар полюсов), тем компактнее, дешевле и экономичнее электродвигатель. Отсюда следует, что предпочтительнее выбирать электродвигатели с наибольшей угловой скоростью. Наибольшей синхронной угловой скоростью у электродвигателей переменного тока является 3000 об]мин, что соответствует одной паре полюсов. При повышении частоты тока угловая скорость также повысится. Чаще всего в вентиляторных установках используются электродвигатели с двумя парами полюсов (1500 об мин, т. е. 150 paд eк). [c.157]
В качестве двигателей вентиляторов можно рекомендовать синхронные электродвигатели, которые могут применяться как синхронные компенсаторы для улучшения os со в сети собственных нужд предприятии. При длительной работе мощной вентиляторной установки с постоянной нагрузкой установка хотя бы одного агрегата с синхронным двигателем даст возможность значительно сократить потери в электросети. Запуск современных синхронных двигателей осуществляется очень просто, так как они имеют дополнительную обмотку для асинхронного запуска. [c.58]
Во избежание опасности взрыва щетки крупных синхронных электродвигателей обдувают специальные вентиляторы, забирающие воздух вне помещения аммиачной холодильной установки. [c.36]
При установке крупного синхронного электродвигателя необходимо [c.75]
В главном приводе машины предусматривается установка синхронного электродвигателя 9 мощностью 295 кет. Для изоляции от внешней среды он изготовляется в закрытом исполнении и имеет воздушное циркулирующее охлаждение. Охлаждение воздуха в электродвигателях зарубежных фирм производится трубчатым водяным холодильником, являющимся принадлежностью электродвигателя. Электродвигатель рассчитан на напряжение тока в сети 6000 в. Средний расход охлаждающей воды, имеющей температуру 22—24 °С и давление 4 ат, составляет 7,5 м 1ч. Возбуждение электродвигателя производится от генератора 10, смонтированного на одном валу с электродвигателем. Вал электродвигателя главного привода соединен с валом редуктора посредством специальной гидравлической муфты 8 типа Вулкан Синклер 5СР4 . [c.99]
Каждый цех с нагрузкой свыше 500 кВ должен имггь при цеховую электрическую подстанцию. При установке синхронных электродвигателей во взрывоопасных помещениях генераторы тока возбуждения [c.211]
На рис. 6.38 приведена схема вискозиметра [67], относящегося к приборам с механической передачей. Исследуемая среда подается в корпус 8, в котором помещен вращающийся цилиндр 6 и измерительный цилиндр 7, который крепится в опорах 1 ж 3. Рама 4 связана с валом измерительного цилиндра 7. Стороны рамы выведены через корпус 8 с помощью сильфонов 5 и 9, которые обеспечивают уплотнение при работе в условиях вакуума или Давления. К раме 4 жестко прикреплен рычаг 2, один конец которого связан С устройством 10 пневмосиловой или электросиловой компенсации, а другой — с устройством 11 начальной установки нуля. Вискозиметр присоединяется к магистрали с исследуемой средой при помощи фланцев и терыостатируется. вращающийся цилиндр 6 приводится во вращение синхронным электродвигателем (на схеме не показан). [c.177]
Замена в моторге-нераторах синхронных электродвигателей на ТВУ. Отключение зимой вентиляторов и регулирование углов атаки роторов аппаратов воздушного охлаждения. Установка компен- [c.122]
Реогониометр, принципиальная схема которого показана на рис. VI.5, представляет собой установку для комплексного исследования полимерных материалов. Рабочий узел выполнен в виде сочетания конуса и ПЛОСКОСТИ, между которыми помещается образец. Возможны и другие варианты установки образца. Привод осуществляется с ПОМОЩЬЮ двух независимых систем, одна из которых создает вращение с постоянной скоростью, а другая — гармониче-ческие колебания. Обе системы включают в себя синхронный электродвигатель (частота вращения 1500 или 3000 об/мин) и 60-ступен-чатую коробку передач с передаточным отношением каждой ступени 10 (т. е. в 1,26 раз), так что в пределах каждого десятичного шорядка может выбираться 10 фиксированных скоростей (частот колебаний), В сумме скорость (частота) может изменяться в 10 раз. Далее движение через червячный редуктор (с передаточным отношением 4 1) передается нижней плоскости рабочего органа прибора. Преобразование вращения в колебания с помощью генератора колебаний (см. ниже) позволяет реализовать частоты примерно от 2,5-10 до 25 Гц. По требованию заказчика прибар уком- [c.130]
Фундаментная плита 7 смесителя (см. рис. 7) пред( гавляет собой мощное чугунное основание, рассчитанное на установку в ее проеме 8 транспортера для передачи выгружаемых смесей на листовальные вальцы. Привод расположен с одной стороны смесителя (см, рис. 9). На шейке переднего ротора 1 смонтированы две шестерни. Большая приводная шестерня 4 находится в зацеплении с малой приводной шестерней 8 приводного вала 7 передаточная шестерня 3 находится в зацеплении с передаточной шестерней 9, сидящей на шейке заднего ротора 10. Приводной вал соединяется непосредственно с ротором тихоходного синхронного электродвигателя, вращающегося со скоростью 94 или 150 об1мин, или — через редуктор 6 — с быстроходным асинхронным или синхронным электродвигателем 5. Выпускаются преимущественно агрегатные установки смесителей с одним приводом на два смесителя. Мощность электродвигателя на один смеситель 221 кет (300 л. с.). Общий вес [c.48]
Выполнение последней команды на градации времени 30 жым и последующая установка прибора в нулевое положение происходят в следующем порядке. Синхронный электродвигатель зацепляющей цапфой циферблата, установленной на градации времени 30 мин, отключает оператор включения С. При этом происходит включение микропереключателя С и его НО контакт образует цепь клемма 5, НЗ контакт микропереключателя Д, тумблер Т, НО контакт микропереключателя С, электродвигатель 2АСМ-100, ПР — клемма 10, — включение асинхронного электродвигателя. С включением асинхронного электродвигателя ступенной вал длинными цапфами, установленными на щестом делении ступенных [c.237]
В практике проектирования мелиоративных насосных станций придерживаются примерно следующих условий при выборе типа двигателя для главных насосов. При мощности до 300 кВт устанавливают асинхронные короткозамкнутые двигатели низкого напряжения (380 В) для мощностей до 100 кВт, а при большей мощности высоковольтные (6300 В). При мощности более 300 кВт устанавливают синхронные двигатели высокого напряжения (6300 и 10 000 В). Но могут быть и отклонения от указанных условий. Так, при значительных мощностях питающего энергией источника есть примеры установки асинхронных короткозамкнутых двигателей мощностью 1700 кВт (осевой насос ОПВ2-145, двигатель ВДД-213/54-16, Л =1700 кВт, и=6 кВ). Частота вращения вала синхронного электродвигателя в минуту (при частоте 50) определяют по формуле [c.186]
Микроэлектроды вращающийся платиновый электрод. Во многих случаях амперометрическоэ титрование удобно выполнять с применением капающего ртутного электрода. Для реакций с участием веществ, агрессивно во.здействующих на ртуть [бром, ионы серебра, железо(II) и др.], предпочтителен вращающийся платиновый электрод. Он представляет собой короткую платиновую проволочку, впаянную в стенку стеклянной трубки. Для обеспечения контакта проволоки с соединительным проводом от поляро-графа внутрь трубки наливают ртуть. Трубку закрепляют в пустотелой. муфте синхронного электродвигателя, вращающего ее с постоянной скоростью >600 об/мин. Имеются вращающиеся электроды промышленного изготовления. Типичная установка показана на рис. 21-11. [c.80]
Работа регулируемых тиристорных преобразователей в условиях резкопеременной нагрузки, каким является главный привод блюминга, сопровождается значительными бросками реактивной мощности, что вызывает колебания напряжения на сборных шинах подстанции 10 кВ, питающей установку и отрицательно сказывается на работе друтих потребителей. Применение в этом случае тиристорных преобразователей возможно, но для устранения колебаний напряжения в сети потребуется установка дополнительных дорогостоящих устройств. Питание электродвигателей главного привода от генераторов постоянного тока для блюминга 1500 оказывается наиболее целесообразным, ввиду возможности компенсации реактивной мощности остальных тиристорных электроприводов стана опережающей реактивной мощностью, генерируемой мощным синхронным электродвигателем преобразовательного агрегата главного привода. Этот агрегат состоит из двух генераторов постоянного тока типа ГП8500-375 с параметрами 8500 кВт, 900 В, 375 об/мин и приводного синхронного электродвигателя типа ДС32121-16 с параметрами 20 000 кВ-А, 10 кВ, 375 об/мин (рис. VI.17). Электродвигатели М1, М2 верхнего и нижнего валков клети питаются соответственно от генераторов Г1, Г2, приводимых во вращение от синхронного электродвигателя СД, питающегося через масляный выключатель В от шин подстанции 10 кВ. Для изменения направления вращения электродвигателей М1, М2 необходимо реверсировать напряжение на зажимах генераторов Г1, Г2. Полярность напряжения на зажимах генераторов для направления прокатки вперед , а в скобках — для прокатки [c.151]
Возбуждение взрывозашишенных синхронных электродвигателей производится от возбудительных агрегатов (двигатель — генератор постоянного тока), устанавливаемых в помещении компрессорной или выносимых в отдельное невзрывоопасное помещение. При установке возбудительного агрегата в помещении компрессорной обе машины (двигатель и генератор) [c.108]
Завод Большевик выпускает установки, состоящие из двух и трех вальцов с бочкой длиной 2130 мм с групповым приводом от синхронного электродвигателя через редуктор. Максимальное число машин в таких серийных установках в настоящее время не превышает трех при использовании вальцов длиной 2130 мм и двух при применении вальцов меньших размеров. Тормозное устройство на муфте электродвигателя отсутствует, так как при групповом приводе от синхронного, электродвигателя осуществляется электродинамическое торможение, обеспечивающее после нансатия на аварийный выключатель останов незагруженных вальцов с поворотом валка в пределах до /4 оборота. [c.101]
Для современных конструкций компрессоров в большинстве случаев применяют клиновидные ремни, так как они почти не дают скольжения и позволяют устанавливать двигатель очень близко к компрессору, что делает установку более компактной. Для привода крупных компрессоров применяют также специальные тихоходные, так называемые синхронные электродвигатели. Ротор такого двигателя насаживается непосредствешю на коленчатый вал компрессора и одновременно является маховиколк Такой двигатель имеет, наиример, воздушный компрессор марки 5Э-14/220. В некоторых компрессорах двигатель соединяется с валом при помощи муфты через зубчатую передачу (редуктор), понижающую число оборотов до требуемой величины. Приводы этих типов более удобны в эксплуатации, чем ременные передачи, так как отпадает необходимость переклейки и смены ремней. [c.131]
Центробежный компрессор завода ЧКД, работающий на фреоне-12 (рис. 127), предназначен для холодильной установки с двумя температурами кипения. Холодопроизводительность первой ступени 2500 кет (2,14-10 ккал1ч) при температуре кипения —40°С, холодопроизводительность второй ступени 1750 кет (1,5-10 ккал1ч) при температуре кипения —6°С. Скорость вращения вала компрессора 5000 об/мин компрессор приводится от четырехиолюсного синхронного электродвигателя. мощностью 2200 кет через редуктор. Компрессор снабжен герметичными уплотнениями, работающими при эксплуатации ма-шины, а также уплотнениями, обеспечивающими герметичность [c.151]
Установка состояла из одноцилиндрового двигателя с диаметром цилиндра 82,6 мм, ходом поршня 114,3 мм. Степень сжатия изменялась в пределах от 4 до 10. Двигатель работал при постоянном числе оборотов (600 об1мин), которое поддерживалось при помощи синхронного электродвигателя при постоянной температуре охлаждающей жидкости (100°) и переменном угле опережения зажигания, который изменялся автоматически при изменении степени сжатия (22,5° до в. м. т. при степени сжатия 5,0). [c.52]
Секция прибора, производящая коммутацию внешних исполнительных цепей, включает микропереключатели 11 и золотники пневмоколодок 10 путем включения и отключения операторов 9. Установка операторов включения в одной из крайних положений (замкнутое или разомкнутое) производится длинными и короткими цапфами ступенных дисков 6, расположенных на валу 5 . Привод вала 5 осуществляется через редуктор 7 асинхронным двигателем 8. Работа прибора происходит в следующем порядке вращение синхронного электродвигателя 12 через редуктор 3 передается циферблату 4, который своими зацепляющими цапфами воздействует на оператор включения 19, расположенный на стойке 16 и предназначенный для включения микропереключателя 20 (С). [c.231]
chem21.info
Использование: в электроприводе. Сущность: в способе взаимной установки n синхронных двигателей, роторы которых подсоединены к общему валу нагрузки, после разворота статоров синхронных двигателей подают переменное напряжение на первую фазную обмотку первого синхронного двигателя, измеряют напряжение на его второй фазной обмотке, поворачивают общей вал нагрузки до тех пор, пока измеряемое напряжение не станет равным нулю, жестко закрепляют вал нагрузки и последовательно подают переменное напряжение на первую фазную обмотку каждого из (n-1) синхронных двигателей. Измеряют напряжение на второй фазной обмотке в каждом двигателе, разворачивая его статор до тех пор, пока измеряемое напряжение не станет равным нулю. После разворота статора последнего двигателя отключают переменное напряжение от первых и фазных обмоток n синхронных двигателей. В результате повышается точность установки и упрощается техническая реализация способа.
Изобретение относится к электротехнике и может быть использовано в электроприводах промышленных роботов.
В тех случаях, когда момент сопротивления на валу нагрузки превышает полезный момент одного синхронного двигателя, в исполнительном элементе привода на валу нагрузки размещают n синхронных двигателей. Для управления несколькими синхронными двигателями, питаемыми от одного силового преобразователя энергии, необходимо произвести их начальную взаимную установку, поэтому в конструкции исполнительного элемента электропривода предусматривается возможность механического поворота статоров /роторов/ этих двигателей. Известен способ взаимной начальной установки двух двигателей, предусматривающий измерение взаимного углового положения двигателей с помощью сельсинной пары с последующей корректировкой этого взаимного положения по результатам измерения (л. 1). Недостатком этого способа установки двигателей является сложность технической реализации способа из-за необходимости размещения в исполнительном элементе не менее двух сельсинов, что усложняет конструкцию исполнительного элемента. Известно устройство для определения углового положения вала синхронного двигателя (л. 2). Это устройство построено в соответствии со способом, согласно которому измеряют фазные токи, напряжения и ЭДС синхронного двигателя и формируют напряжения, изменяющиеся по законам синуса и косинуса двойного угла поворота ротора двигателя. Получая названные напряжения для каждого синхронного двигателя и сравнивая их фазовые углы, можно произвести взаимную установку двигателей. Недостатком данного способа взаимной выставки синхронных двигателей является сложность технической реализации, для которой требуется применение точных датчиков тока, напряжения и ЭДС. Ближайшим аналогом является способ взаимной установки n синхронных двигателей, роторы которых подсоединены к общему валу нагрузки, при котором поочередно подают постоянное напряжение на первые фазные обмотки синхронных двигателей, измеряют угловые положения статоров синхронных двигателей относительно вала нагрузки и поворачивают статор каждого из (n 1) синхронных двигателей относительно статора первого двигателя в соответствии с результатами упомянутых измерений (л.3). Недостатком этого способа является малая точность взаимной установки, так как начальное положение ротора вала (нагрузки) относительно статора каждого из двигателей определяется путем подачи постоянного напряжения в обмотку статора, т.е.путем самосинхронизации, которая не может быть высокой точности при значительном трении в исполнительном элементе привода. Целью изобретения является повышение точности взаимной установки синхронных двигателей. Указанная цель достигается тем, что после указанного разворота статоров синхронных двигателей подают попеременное напряжение на первую фазную обмотку первого синхронного двигателя, измеряют напряжение на его второй фазной обмотке, поворачивают общий вал нагрузки до тех пор, пока измеряемое напряжение на второй обмотке не станет равным нулю, жестко закрепляют общий вал нагрузки и последовательно поочередно подают на первую фазную обмотку каждого из (n-1) синхронных двигателей упомянутое переменное напряжение, измеряют напряжение на его второй фазной обмотке и разворачивают статор каждого из (n 1) синхронных двигателей до тех пор, пока напряжение на его второй фазной обмотке не станет равным нулю, после чего отключают переменное напряжение от первых фазных обмоток синхронных двигателей. Изобретение поясняется следующим образом. Как и в известном способе, сначала измеряют угловые положения вала нагрузки, получаемые при самосинхронизации каждого из n синхронных двигателей (СД), осуществляемый путем подачи постоянного напряжения в одну из его статорных обмоток. По результатам измерения поворачивают статоры (n 1) синхронного двигателя до тех пор, пока угловые положения вала нагрузки после самосинхронизации каждого из (n 1) двигателей не станут равными угловому положению вала нагрузки, получаемому после самосихронизации первого синхронного двигателя. Так из-за трения в исполнительном механизме самосинхронизация синхронных двигателей не может обеспечить требуемой точности совпадения осей полей статора и ротора, то согласно изобретению начинают подавать поочередно переменные напряжения на первую обмотку n синхронных двигателей. Благодаря наличию коэффициента взаимодействия индукции, например, в двухфазных синхронных двигателях с возбуждением от магнитов, располагаемых на роторе, на вторых обмотках двигателей имеется напряжение, изменяемое по закону синуса двойного угла поворота ротора (вала нагрузки). После подачи переменного напряжения на первую обмотку первого СД поворачивают общий вал нагрузки до тех пор, пока на вторичной фазной обмотке первого СД не будет получено нулевое или минимально возможное напряжение. Закрепляют (затормаживают) вал нагрузки. В этом положении коэффициент взаимоиндукции фазных обмоток статора первого СД равен нулю и ось магнита ротора точно совпадает с осью его первой фазной обмотки. При этом трение в исполнительном механизме (в подшипниках нагрузки) преодолевается настройщиком и не связано со свойством самосинхронизации СД, что и обеспечивает высокую точность выставки осей полей статора и ротора. Затем подают переменное напряжение на первую фазную обмотку статора второго СД, поворачивая его статор, добиваются минимума напряжения на его второй фазной обмотке статора. Закрепляют статор СД и далее повторяют упомянутые операции со всеми другими СД, расположенными на общем валу нагрузки. В соответствии с описанным способом были произведены взаимные установки синхронных двигателей ДБМ-120 в исполнительных механизмах мотор-звездочек самоходных шасси промышленных роботов. Точность выставки была не хуже одного электрического градуса, в то время как при известном способе выставки погрешность могла достигать 30 электрических градусов.Формула изобретения
Способ взаимной установки n синхронных двигателей, роторы которых подсоединены к общему валу нагрузки, при котором поочередно подают постоянное напряжение на первые фазные обмотки синхронных двигателей относительно вала нагрузки и поворачивают статор каждого из n 1 синхронных двигателей относительно статора первого двигателя в соответствии с результатами упомянутых измерений, отличающийся тем, что после указанного разворота статоров синхронных двигателей подают переменное напряжение на первую фазную обмотку первого синхронного двигателя, измеряют напряжение на его второй фазной обмотке, поворачивают общий вал нагрузки до тех пор, пока напряжение на его второй фазной обмотке не станет равным нулю, жестко закрепляют вал нагрузки и последовательно подают указанное переменное напряжение на первую фазную обмотку каждого из n 1 синхронных двигателей, измеряют напряжение на его второй фазной обмотке, а разворачивают статор каждого из n 1 синхронных двигателей до тех пор, пока напряжение на его второй фазной обмотке не станет равным нулю, после чего отключают переменное напряжение от первых фазных обмоток синхронных двигателей.Похожие патенты:

Изобретение относится к области электротехники, в частности к управляемым электродвигателям индукторного типа, и может быть использовано в бытовой технике для привода многоскоростных стиральных машин

Изобретение относится к электротехнике, а точнее к электрическим машинам для бытовой техники, например, для стиральных машин и компрессоров холодильников

Изобретение относится к области электротехники, в частности, к электродвигателям с встроенным датчиком углового положения и может быть использовано, например, в вентильных электроприводах в качестве исполнительного элемента, а также в устройствах автоматики

Изобретение относится к электротехнике, а именно к вентильным электродвигателям с бесконтактной коммутацией, осуществляемой полупроводниковыми приборами, и может найти применение в автоматизированных электроприводах в качестве управляемого исполнительного двигателя, например в медицине для аппаратов искусственного дыхания


Изобретение относится к электротехнике и может быть использовано в электроприводах с вентильными электродвигателями

Изобретение относится к электротехнике, а именно к управлению электродвигателями, и может найти применение в устройстве, где необходимы двигатели высокой надежности с большим моментом на валу в пазовом и беспазовом вариантах исполнения статора

Изобретение относится к электротехнике и может быть использовано для управления электродвигателями переменного тока

Изобретение относится к электротехнике и может быть использовано в приборных электроприводах, например, в гироскопических электромеханических устройствах, в электроприводах винчестерских дисков ЭВМ, а также в электроприводах бытовых устройств


Изобретение относится к области электротехники, в частности к электродвигателям с встроенным датчиком положения и скорости, и может быть использовано, например, в вентильных электроприводах в качестве исполнительного элемента, в устройствах автоматики

Изобретение относится к управляемым электроприводам

Изобретение относится к магнитному вращающемуся устройству и, в частности, к магнитному вращающемуся устройству, которое использует многократно пульсирующие силы, возникающие между постоянным магнитом и электромагнитом

Изобретение относится к области электротехники, в частности к электрическим машинам с бесконтактной коммутацией секций обмоток статора в зависимости от положения ротора с помощью преобразователя частоты, т


Изобретение относится к электротехнике, в частности к конструкциям магнитоэлектрических генераторов тока торцевого типа, приводимых во вращение, например, ветровым лопастным колесом



Изобретение относится к области электротехники, в частности к вентильным электроприводам
Изобретение относится к электротехнике и может быть использовано в электроприводах промышленных роботов
www.findpatent.ru
Принцип действия синхронного двигателя выглядит практически так же, как и асинхронного. Однако у этого типа силовых установок имеются существенные отличия и особенности. И хоть доля асинхронных агрегатов в промышленности составляет 96% от общего количества электродвигателей, другие варианты, включая синхронный, тоже нашли своих потребителей.
В основном синхронные и асинхронные двигатели мало чем отличаются друг от друга. Ключевым отличием первых моделей является то, что вращение якоря осуществляется с такой же скоростью, как и вращение магнитного потока. При этом внутри установки встроена проволочная обмотка, передающая переменное напряжение, а не короткозамкнутый ротор, как у асинхронных устройств. Также отдельные конструкции оборудованы постоянными магнитами, но они существенно повышают стоимость двигателя.
При увеличении нагрузки скорость вращения ротора остается прежней. Именно такая особенность характеризует эту разновидность силовых установок. Ключевое требование к таким машинам выглядит следующим образом: количество полюсов у движущегося магнитного поля должно соответствовать числу полюсов электромагнита на роторе.
Принцип работы и устройство синхронных машин остаются понятными даже для неопытных потребителей. К ключевым составляющим системы относят следующие узлы:
Между зафиксированной и подвижной частью системы находится небольшая воздушная прослойка, гарантирующая сбалансированную работу мотора и беспрепятственное воздействие магнитного поля на ключевые составляющие агрегата. Также в двигателе установлены подшипники, необходимые для вращения ротора, и клеммная коробка. Последняя находится в верхней части механизма.
Изучая принцип работы синхронного двигателя, важно понимать, что, как и остальные разновидности силовых установок, они преобразуют один тип энергии в другой. Простыми словами, встроенные механизмы делают из электрической энергии механическую, а вся работа происходит по такому алгоритму:
Зная, как устроен и работает синхронный двигатель, остается правильно распределить его энергию и использовать в нужных целях. Однако производительность и КПД системы будут максимальными только в том случае, если удастся вывести ее в нормальный режим работы.
Существует обратный вариант синхронных двигателей — синхронные генераторы. Они работают немного иначе:
Но в любом случае необходимо осуществить стабилизацию напряжения на выходе генератора. Это делается соединением роторной обмотки с источником напряжения.
В зависимости от конструктивных особенностей ротор может быть оборудован постоянными или электрическими магнитами или так называемыми полюсами. Что касается индукторов, то в синхронных установках они бывают:
Отличаются эти типы друг от друга только взаимным расположением полюсов. Чтобы снизить сопротивление магнитного поля и улучшить проникновение тока, механизм оснащают сердечниками, которые выполнены из ферромагнетиков. Сердечники находятся и в роторе, и в статоре, а для их изготовления задействуется исключительно электротехническая сталь. Дело в том, что этот материал содержит в себе большое количество кремния, существенно снижающего вихревые токи и улучшающего электрическое сопротивление сердечника.
При использовании синхронных двигателей возникает масса трудностей на этапе их запуска. Из-за этого они не пользуются особой популярностью и уступают асинхронным вариантам.
С момента появления на рынке работа синхронных агрегатов обеспечивалась специальным асинхронником, который механически соединялся с остальными узлами. По сути, ротор разгонялся до нужной частоты с помощью второго типа моторов. Современные асинхронники не нуждаются в подключении дополнительных механизмов, и все, что требуется для их работы, — соответствующее напряжение для статорной обмотки.
Как только система обеспечит нужную скорость вращения, разгонный двигатель будет отключен. При этом магнитные поля из электрического мотора выведут его на работу в синхронном режиме. Чтобы разогнать установку, придется задействовать еще один мотор мощностью 10% от мощности синхронного двигателя. При разгоне электродвигателя на 1 кВт используют разгонную систему мощностью 100 Вт. Как утверждают специалисты, таких показателей вполне хватает для сбалансированной работы машины в холостом режиме или с небольшой нагрузкой.
Синхронный электродвигатель представляет собой важное изобретение для различных направлений промышленности. Но из-за сложной конструкции и высокой стоимости оборудования его используют в редких случаях.
Сферы применения электрических моторов синхронного типа очень ограничены. В большинстве случаев установку применяют для повышения показателей мощности в энергосистеме, что обусловлено их способностью функционировать при любых коэффициентах мощности и отличной экономичностью.
Устройства востребованы для тех условий, где скорость вращения едва достигает 500 оборотов в минуту и появляется необходимость поднять мощность. В настоящее время их активно внедряют в поршневые насосы, компрессорные установки, прокатные станки и другие системы.
220v.guru