В системах управления, регулирования и контроля широко применяются управляемые электродвигатели небольшой мощности. С помощью этих двигателей осуществляется
Рис. 17.7. Схема включения
асинхронного исполнительного двигателя
преобразование электрического сигнала в механическое перемещение — вращение вала. Такие электродвигатели называют исполнительными (ИД).
Характер требований, предъявляемых к исполнительным двигателям, определяется спецификой их работы: частые пуски, реверсы, постоянно изменяющаяся частота вращения. Основные требования - отсутствие самохода, т. е. самоторможение при снятии сигнала управления; широкий диапазон регулирования частоты вращения; линейность характеристик; большой пусковой момент; малая мощность управления; быстродействие (малоинерционность).
На статоре асинхронного исполнительного двигателя расположена двухфазная обмотка (см. § 16.2). Одна из фазных обмоток — обмотка возбуждения (ОВ) - постоянно включена в сеть с напряжением U1, а на другую - обмотку управления (ОУ) — напряжение (сигнал управления) Uc подается лишь при необходимости включения двигателя (рис. 17.7).
Для работы двухфазного ИД необходимо вращающееся магнитное поле, непременным условием возникновения которого является наличие пространственного и временного сдвигов между МДС фазных обмоток статора. Пространственный сдвиг указанных МДС обеспечивается конструкцией обмотки статора, при ко торой оси фазных обмоток сдвинуты в пространстве относительно друг друга обычно на угол 90 эл. град. Временной (фазный) сдвиг МДС создается либо питанием обмотки статора двухфазной сие темой напряжений (см. § 16.2), либо включением в цепь ОУ фазовращателя — устройства, позволяющего получать различные фазовые сдвиги напряжения на его выходе относительно напряжения на входе, т. е. относительно напряжения на обмотке возбуждения, либо включением последовательно в цепь ОВ емкости ( (рис. 17.7).
Последний способ включения ИД применяют наиболее часто Обычно значение емкости С выбирают из условия получения кругового поля при пуске двигателя. По окончании пускового периода двигатель работает с эллиптическим вращающимся полем.
В процессе управления двигателем изменяют сигнал Uс на ОУ при этом меняется как значение (амплитуда) МДС этой обмотки, так и ее фазовый сдвиг относительно МДС обмотки возбуждения. Поэтому рассматриваемый способ управления ИД называют амплитудно-фазовым.
Одно из основных требований к ИД — отсутствие самохода. Известно, что обычные асинхронные двигатели имеют небольшое активное сопротивление обмотки ротора и работают с малым критическим скольжением (см. § 13.3). Такие двигатели непригодны в качестве исполнительных, так как они обладают самоходом, т. е. при снятии сигнала управления двигатель будет продолжать работать как однофазный. Это иллюстрирует рис. 17.8, а, на котором точка А определяет режим работы двигателя с нагрузочным моментом Миом при наличии сигнала управления. При снятии сигнала управления поле статора становится пульсирующим (обмотка возбужения постоянно включена в сеть) и режим
Рис. 17.8. Устранение самохода в асинхронном
исполнительном двигателе
работы двигателя "определяется точкой В на характеристике однофазного двигателя. При этом электромагнитный момент двигателя останется положительным. Если же увеличить активное сопротивление ротора, то форма кривых прямого Мпр, обратного Мобр и результирующего М = Мпр + Мобр моментов изменится (рис. 17.8, б): максимумы моментов Мпр и Мобр сместятся в область больших скольжений (sкр > 1 ). Теперь после прекращения сигнала управления, т. е. при переходе двигателя в однофазный режим, электромагнитный момент становится отрицательным Мт (точка В) и оказывает на ротор тормозящее действие, не допуская самохода.
К исполнительным двигателям предъявляется также требования малоинерционности (быстродействия), т. е. при подаче сигнала управления ротор двигателя должен очень быстро достигать установившейся частоты вращения. Выполнению этого требования
способствуют увеличение пускового момента, уменьшение синхронной частоты вращения поля статора и снижение момента инерции ротора. При повышенных частотах питающего напряжения (больших синхронных частотах вращения) ИД с ротором обычной (короткозамкнутой) конструкции из-за значительного момента инерции последнего не обладают требуемым быстродействием. В этом случае применяют асинхронные
исполнительные двигатели с полым немагнитным ротором (рис. 17.9). Полый немагнитный ротор представляет собой тонкостенный алюминиевый стакан 2, что, с одной стороны, обеспечивает ротору повышенное активное сопротивление, а с другой — весьма небольшой момент инерции.
Двигатель имеет два статора: внешний 1 с обмоткой и внутренний 3 без обмотки, входящий внутрь полого стакана ротора Внутренний статор необходим для уменьшения магнитного сопро тивления основному магнитному потоку.
По сравнению с исполни тельными двигателями обычно и конструкции двигатели с полым немагнитным ротором имею! повышенные габариты и невысокий КПД. Это объясняется повышенным зазором между наружным и внутренним статорами, который складывает ся из толщины стенки стакана ротора и двух воздушных зазо ров. Как известно, увеличение воздушного зазора способствуем росту намагничивающего тока двигателя и снижению его КПД.
Рис. 17.9. Асинхронный двигатель
с полым немагнитным ротором:
1 — внешний статор; 2 — стакан ротора; 3 — внутренний статор; 4— обмотка статора; 5 — вал; 6 — втулка крепления стакана ротора
studfiles.net
Асинхронные исполнительные двигатели [7-11, 60, 61] широко применяются в системах автоматического управления. Они представляют собой асинхронные двигатели небольшой мощности (0,1—300 вт) с двухфазной обмоткой статора и короткозамкнутым ротором (рис. 31-1). Одна из обмоток статора называется обмоткой возбуждения (В) и находится под постоянным напряжением £/в, а вторая называется обмоткой управления (У) и питается напряжением Uv, величина
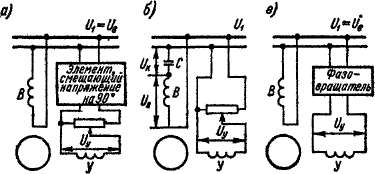
Рис. 31-1. Схемы включения асинхронных исполнительных двигателей
(рис. 31-1, а я б) или фаза (рис. 31-1, в) которого изменяются под воздействием управляющего сигнала. В первом случае управление называется а м плп л т у д -н ы м, а во втором — фазовым. В обоих случаях напряжения UBи Uyсдвинуты по фазе, в результате чего двигатель способен развивать вращающий момент.
Обычно к исполнительным двигателям предъявляются следующие требования: 1) отсутствие самохода, т. е. необходимость самоторможения и остановки двигателя при снятии 'напряжения управления Uy; 2) устойчивая работа во всем диапазоне скоростей вращения; 3) изменение скорости вращения в широком диапазоне при изменении величины или фазы напряжения управления; 4) близкие к линейным механические {М = / (п) при J/y — const) и регулировочные (п — f {Uy) при М = const) характеристики; 5) большая величина пускового момента; 6) малая мощность управления; 7) быстродействие; 8) надежность в работе; 9) малые габариты и вес.
Исполнительные двигатели строятся с таким расчетом, что круговое вращающееся поле в них возникает только при пуске. Это способствует получению большого пускового момента. Отсутствие самохода, устойчивая работа и линейность характеристик достигаются выбором активного сопротивления ротора настолько большим, что критическое скольжение sm= 3 ■*• 4. При этих условиях кривые моментов прямой последовательности Мги обратной последовательности Маимеют вид, изображенный на рис. 31-2. Из рисунка видно, что при
снятии напряжения управления, когда токи прямой и обратной последовательности равны (см. § 30-1), результирующий момент М = Мх+ М2 в рабочем диапазоне скольжений (0 < s < 1) становится отрицательным, и поэтому при £/у= 0
ротор исполнительного двигателя, в отличие от нормального двигателя при работе в однофазном режиме (см. § 30-1), останавливается. Вместе с тем, увеличение сопротивления ротора исполнительного двигателя приводит к снижению
его номинальной мощности при
тех же габаритах в два-три раза. Вид механических и регулировочных характеристик асинхронных исполнительных двигателей при амплитудном управлении показан на рис. 31-3.
Асинхронные исполнительные двигатели имеют следующие разновидности конструкции ротора: 1) с обмоткой в виде беличьей клетки, 2) полый немагнитный ротор и 3) полый ферромагнитный ротор. Двигатель с полым немагнитным ротором (рис. 31-4) имеет внешний и внутренний статоры из листовой электротехнической стали, между которыми вращается тонкостенный (0,2—1,0 мм) ротор из алюминиевого сплава, имеющий форму стаканчика. Двухфазная обмотка обычно располагается на внешнем статоре. Двигатель с полым ферромагнитным ротором не имеет внутреннего статора, так как роль магнитопровода выполняет сам ротор. Для улучшения технических показателей двигателя иногда внешнюю цилиндрическую поверхность ферромагнитного ротора или его днища (торцевые пробки) покрывают медью.
Двигатели с полым немагнитным ротором имеют малую механическую инерцию и поэтому обладают большим быстродействием. Однако величина немагнит-
Рис. 31-4. Устройство асинхронного исполнительного двигателя с полым немагнитным ротором
/ — внешний статор; 2 — внутренний статор;
3 — обмотка; 4 — подшипниковые щиты; 5 — вал;
6 — корпус; 7 — полый ротор


ного зазора магнитной цепи, между внешним и внутренним статорами, у них получается большой (0,5—1,5 мм), что приводит к уменьшению к. п. д. и коэффициента мощности и к увеличению габаритов и веса. Из-за последних двух факторов в ряде случаев преимущество этих двигателей в быстродействии теряется. Эти двигатели также менее надежны в работе, чем двигатели с беличьей клеткой.
Двигатели с полым ферромагнитным ротором имеют весьма большое активное сопротивление ротора, и поэтому их к. п. д. еще ниже, чем- у двигателей с полым немагнитным ротором.
Наиболее часто применяются двигатели с беличьей клеткой и полым немагнитным ротором. Исполнительные двигатели изготовляются на номинальные частоты 50—1000 гц.
В некоторых системах автоматического управления используются управляемые двигатели, роторы которых не вращаются, а лишь поворачиваются в пределах некоторого небольшого угла. Воздействие этих двигателей на управляемый
Рис. 31-5. Схема (а) асинхронного тахогенератора и распределение в роторе токов трансформации (б) и вращения (в)
объект зависит от величины развиваемого ими вращающего момента, и такие двигатели называются моментными. Величина их момента также зависит от напряжения обмотки управления.
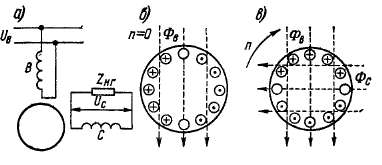
Асинхронные тахогенераторы. Тахогенераторы переменного тока можно выполнить в виде небольших синхронных генераторов, величина э. д. с. которых при постоянном потоке возбуждения попорциональна скорости вращения. Однако такие тахогенераторы имеют переменную частоту, что является их существенным недостатком. В связи с этим применяются асинхронные тахогенераторы (рис. 31-5), устройство которых вполне аналогично устройству исполнительного двигателя с полым ротором.
Обмотка возбуждения В тахогенератора питается от сети переменного тока с / = const и создает пульсирующий поток Фв. При неподвижном роторе (рис. 31-5, б) этот поток индуктирует в роторе э. д. с. трансформации, в результате чего в роторе возникают токи, которые создают магнитный поток, действующий по оси обмотки возбуждения. Этот поток с сигнальной обмоткой С не сцепляется, так как эта обмотка сдвинута относительно обмотки В на 90°. Поэтому при л = 0 напряжение сигнальной обмотки Uc = 0. При вращении ротора в нем индуктируется также э. д. с. вращения, в результате чего в роторе возникает также Другая система токов (рис. 31-5, в), которая создает поток Фс, сцепляющийся с сигнальной обмоткой. Этот поток пульсирует с частотой тока возбуждения, величина его пропорциональна и, и в обмотке С индуктируется э. д. с. Ес~ я. К этой обмотке присоединяется нагрузка в виде измерительного прибора или элемента системы автоматического регулирования.
§ 31-2. Вращающиеся трансформаторы
Вращающиеся, или поворотные, трансформаторы [7—11] применяются в автоматических и счетно-решающих устройствах для получения напряжений переменного тока, пропорциональных синусу и косинусу угла поворота а ротора трансформатора или пропорциональных самому углу поворота.
По своей конструкции вращающийся трансформатор подобен асинхронному двигателю с фазным ротором и имеет на статоре и роторе симметричные двухфазные обмотки со сдвигом в пространстве на 90° эл. (рис. 31-6). Концы обмотки ротора выводятся наружу с помощью щеток или при ограниченном угле поворота также с помощью гибких проводников.
Вследствие сдвига обмотки на 90° эл. взаимная индуктивность между фазами обмотки статора, как и между фазами обмотки ротора, равна нулю. В то же время
взаимная индуктивность между фазами обмоток статора и ротора должна с возможно большей точностью меняться в зависимости от угла а по синусоидальному закону. Для этого стремятся
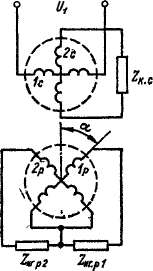
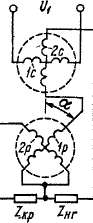
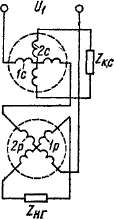
Рис. 31-6." Схема соединений синусно-коси-нусного вращающегося трансформатора
Рис. 31-7. Схемы соединений линейного вращающегося трансформатора
к тому, чтобы- формы кривых магнитных полей обмоток были по возможности ближе к синусоидальной и э. д. с, индуктируемые высшими пространственными гармониками поля, были минимальны. Жесткие требования предъявляются к точности изготовления и качеству магнитопровода. Нередко применяются синусные обмотки (см. § 22-4). В ряде случаев максимальная погрешность воспроизведения функций sin os и cos а не превышает 0,02—0,03%
Обмотка статора 1с (рис. 31-6) является обмоткой возбуждения и приключается к сети переменного тока со стабилизированным напряжением. Поток возбуждения, создаваемый этой обмоткой, индуктирует в обмотке ротора 1р э. д. с, пропорциональную sin a, a в обмотке 2р — э. д. с, пропорциональную cos а. При подключении к одной или обеим обмоткам ротора нагрузки в них возникают токи, создающие в машине вторичное магнитное поле. Индуктируемые этим полем э. д. с. могут исказить синусную и косинусную зависимости вторичных напряжений от угла поворота. Во избежание этого необходимо иметь в цепях вторичных обмоток равные сопротивления нагрузки ZHr.p2=%нт.р1 либо замкнуть вторичную обмотку статора 2с на сопротивление ZK. c, величина которого равна внутреннему сопротивлению источника питания обмотки 1с. В обмотке
2с при этом индуктируется ток, который компенсирует вторичный магнитный поток, действующий перпендикулярно оси обмотки возбуждения. Указанные мероприятия называются соответственно вторичным и первичным симметрированием вращающегося трансформатора.
Схемы для получения на сопротивлении нагрузки Zmнапряжения, изме,-няющегося линейно в функции угла поворота ротора, изображены на рис. 31-7. При соответствующем подборе величин сопротивлений ZK.C или ZK.p линейная зависимость этого напряжения достигается в пределах 0 < а < 60°.
Вращающиеся трансформаторы применяются также для определения (по величинам напряжений вторичных обмоток) гипотенузы прямоугольного треугольника по заданным его катетам или для определения одного катета по заданным гипотенузе и другому катету. Аналогично находится также величина некоторого вектора по его составляющим и наоборот. Выходные напряжения трансформатора подаются на входные элементы системы автоматического регулирования.
В последнее время изготовляются также вращающиеся трансформаторы с печатными обмотками, расположенными на дискообразных или цилиндрических поверхностях статора или ротора. Такие обмотки, выполняемые подобно печатным радиомонтажным схемам, позволяют избежать погрешностей, связанных с зубчатым строением статора и ротора обычного вращающегося трансформатора и пр.
§ 31-3. Однофазные сельсины
Сельсины (сокращение, происшедшее от английского слова selfsynchroni-zing — самосинхронизирующийся) применяются чаще всего- для синхронного поворота или вращения двух или нескольких осей, не связанных друг с другом .механически, а также для некоторых дру-~ гих целей.
Однофазные сельсины чаще всего имеют следующее устройство (рис. 31-8). На явно-выраженных полюсах статора расположена сосредоточенная обмотка возбуждения В, а в пазах цилиндрического ротора — три распределенные обмотки синхронизации С, которые сдвинуты относительно друг друга в пространстве на 120° эл. и вполне аналогичны трехфазной обмотке нормальной машины переменного тока. Обмотки ротора соединяются с внешними цепями с помощью контактных колец и щеток. Сердечники статора и ротора собраны из листовой электротехнической стали.
Рассмотрим работу однофазных сельсинов.
В-индикаторном режиме работы (рис. 31-8) один сельсин-датчик Д управляет работой одного или нескольких сельсинов-приемников П. Обмотки возбуждения В этих сельсинов включаются в общую сеть, а обмотки синхронизации С соединяются друг с другом, как показано на рис. 31-8. Пульсирующее поле возбуждения индуктирует э. Д. с. в «фазах» обмоток синхронизации. Если углы поворота соответствующих фаз датчика р"д и приемника р"п пвотношению к осям полюсов одинаковы (р"д = р\,), то э. Д. с. соединенных друг с другом «фаз» обмоток синхронизации также одинаковы:
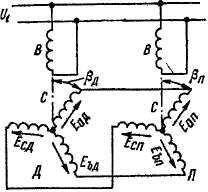
Рис. 31-8. Схемы включения однофазных сельсинов при индикаторном режиме работы

и направлены встречно. При этом в обмотках синхронизации не возникает никаких токов и электромагнитные моменты сельсинов равны нулю. Если же роторы сельсинов будут занимать неодинаковое положение и поэтому так называемый угол рассогласования
будет не равен нулю, то указанные выше равенства э. д. с. нарушатся, в обмотках синхронизации возникнут токи и на роторы сельсинов будут действовать электромагнитные моменты Мяи Мп. Более подробный анализ этого вопроса показывает, что моменты датчика и приемника имеют разные знаки и оба действуют в направлении уменьшения угла рассогласования Др. Если бы момент сопротивления на валу сельсина-приемника был равен нулю, то ДР = 0 и ротор

Рис. 31-9. Устройство бесконтактного сельсина
этого сельсина в точности воспроизводил бы движения ротора сельсина-датчика, притом не^только в режиме медленного поворота ротора, но и при его вращении с определенной скоростью. В действительности на ротор сельсина-приемника действуют определенные, хотя и небольшие тормозные моменты. Это моменты от трения в подшипниках, на контактных кольцах и о воздух в сельсине, а также небольшой момент сопротивления механизма, соединенного с валом сельсина-приемника (стрелка или шкала указательного прибора — индикатора, движок небольшого реостата и др.). Поэтому всегда существует небольшая ошибка ДР в передаче угла. Некоторая ошибка возникает также в результате различных неточностей в изготовлении сельсинов, зубчатого строения их ротора и т. д. Сельсины различных классов точности имеют максимально допустимые значения углов рассогласования (ошибок) в пределах 0,25—2,5°. Максимальный момент сельсинов-приемников обычно находится в пределах 200—2000 гс-см.
Используются также другие схемы включения и режимы работы сельсинов [7-11,62].Н
Бесконтактные сельсины (рис. 31-9), предложенные А. Г. Иосифьяном и А. Б. Свечарником в 1938 г., имеют то преимущество, что отсутствие скользящих щеточных контактов увеличивает надежность работы сельсинов и уменьшает их погрешности в#мду уменьшения потерь на трение. В таких сельсинах обе обмотки размещаются на статоре /, а ротор 3 не имеет обмоток. Обмотки синхронизации 5 этого сельсина располагаются на статоре, который по своей конструкции аналогичен статору асинхронного двигателя. Обмотка возбуждения 2 имеет вид кольцевых коаксиальных катушек, охватывающих ротор. Особенностью уст-
ройства ротора является то, что он имеет немагнитную часть 4, благодаря чему полюсы ротора в магнитном отношении разделены и поток Ф направляется из одного полюса ротора через неподвижный внешний магнитопровод 6 в другой полюс ротора ичерез ротор в статор. В результате этого при неподвижной обмотке возбуждения удается получить в воздушном зазоре между ротором и статором магнитное поле такого же вида, как и в обычном сельсине.
Бесконтактные сельсины получили значительное распространение, однако их недостатками являются: 1) усложнение конструкции, 2) удвоенная величина воздушных зазоров в магнитной цепи, 3) повышенные размеры и вес.
Сельсины также изготовляются для работы при / = 50 -5- 1000 гц.
lektsia.com
В системах управления, регулирования и контроля широко применяются управляемые электродвигатели небольшой мощности. С помощью этих двигателей осуществляется
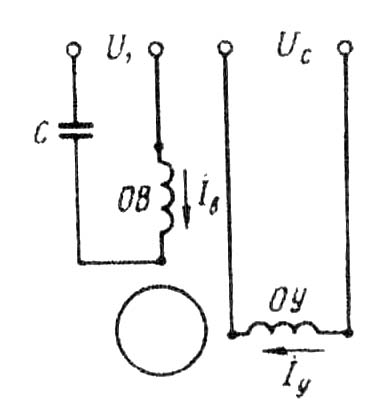
Рис. 17.7. Схема включения
асинхронного исполнительного двигателя
преобразование электрического сигнала в механическое перемещение — вращение вала. Такие электродвигатели называют исполнительными (ИД).
Характер требований, предъявляемых к исполнительным двигателям, определяется спецификой их работы: частые пуски, реверсы, постоянно изменяющаяся частота вращения. Основные требования - отсутствие самохода, т. е. самоторможение при снятии сигнала управления; широкий диапазон регулирования частоты вращения; линейность характеристик; большой пусковой момент; малая мощность управления; быстродействие (малоинерционность).
На статоре асинхронного исполнительного двигателя расположена двухфазная обмотка (см. § 16.2). Одна из фазных обмоток — обмотка возбуждения (ОВ) - постоянно включена в сеть с напряжением U1, а на другую - обмотку управления (ОУ) — напряжение (сигнал управления) Uc подается лишь при необходимости включения двигателя (рис. 17.7).
Для работы двухфазного ИД необходимо вращающееся магнитное поле, непременным условием возникновения которого является наличие пространственного и временного сдвигов между МДС фазных обмоток статора. Пространственный сдвиг указанных МДС обеспечивается конструкцией обмотки статора, при ко торой оси фазных обмоток сдвинуты в пространстве относительно друг друга обычно на угол 90 эл. град. Временной (фазный) сдвиг МДС создается либо питанием обмотки статора двухфазной сие темой напряжений (см. § 16.2), либо включением в цепь ОУ фазовращателя — устройства, позволяющего получать различные фазовые сдвиги напряжения на его выходе относительно напряжения на входе, т. е. относительно напряжения на обмотке возбуждения, либо включением последовательно в цепь ОВ емкости ( (рис. 17.7).
Последний способ включения ИД применяют наиболее часто Обычно значение емкости С выбирают из условия получения кругового поля при пуске двигателя. По окончании пускового периода двигатель работает с эллиптическим вращающимся полем.
В процессе управления двигателем изменяют сигнал Uс на ОУ при этом меняется как значение (амплитуда) МДС этой обмотки, так и ее фазовый сдвиг относительно МДС обмотки возбуждения. Поэтому рассматриваемый способ управления ИД называют амплитудно-фазовым.
Одно из основных требований к ИД — отсутствие самохода. Известно, что обычные асинхронные двигатели имеют небольшое активное сопротивление обмотки ротора и работают с малым критическим скольжением (см. § 13.3). Такие двигатели непригодны в качестве исполнительных, так как они обладают самоходом, т. е. при снятии сигнала управления двигатель будет продолжать работать как однофазный. Это иллюстрирует рис. 17.8, а, на котором точка А определяет режим работы двигателя с нагрузочным моментом Миом при наличии сигнала управления. При снятии сигнала управления поле статора становится пульсирующим (обмотка возбужения постоянно включена в сеть) и режим

Рис. 17.8. Устранение самохода в асинхронном
исполнительном двигателе
работы двигателя "определяется точкой В на характеристике однофазного двигателя. При этом электромагнитный момент двигателя останется положительным. Если же увеличить активное сопротивление ротора, то форма кривых прямого Мпр, обратного Мобр и результирующего М = Мпр + Мобр моментов изменится (рис. 17.8, б): максимумы моментов Мпр и Мобр сместятся в область больших скольжений (sкр > 1 ). Теперь после прекращения сигнала управления, т. е. при переходе двигателя в однофазный режим, электромагнитный момент становится отрицательным Мт (точка В) и оказывает на ротор тормозящее действие, не допуская самохода.
К исполнительным двигателям предъявляется также требования малоинерционности (быстродействия), т. е. при подаче сигнала управления ротор двигателя должен очень быстро достигать установившейся частоты вращения. Выполнению этого требования
способствуют увеличение пускового момента, уменьшение синхронной частоты вращения поля статора и снижение момента инерции ротора. При повышенных частотах питающего напряжения (больших синхронных частотах вращения) ИД с ротором обычной (короткозамкнутой) конструкции из-за значительного момента инерции последнего не обладают требуемым быстродействием. В этом случае применяют асинхронные
исполнительные двигатели с полым немагнитным ротором (рис. 17.9). Полый немагнитный ротор представляет собой тонкостенный алюминиевый стакан 2, что, с одной стороны, обеспечивает ротору повышенное активное сопротивление, а с другой — весьма небольшой момент инерции.
Двигатель имеет два статора: внешний 1 с обмоткой и внутренний 3 без обмотки, входящий внутрь полого стакана ротора Внутренний статор необходим для уменьшения магнитного сопро тивления основному магнитному потоку.
По сравнению с исполни тельными двигателями обычно и конструкции двигатели с полым немагнитным ротором имею! повышенные габариты и невысокий КПД. Это объясняется повышенным зазором между наружным и внутренним статорами, который складывает ся из толщины стенки стакана ротора и двух воздушных зазо ров. Как известно, увеличение воздушного зазора способствуем росту намагничивающего тока двигателя и снижению его КПД.
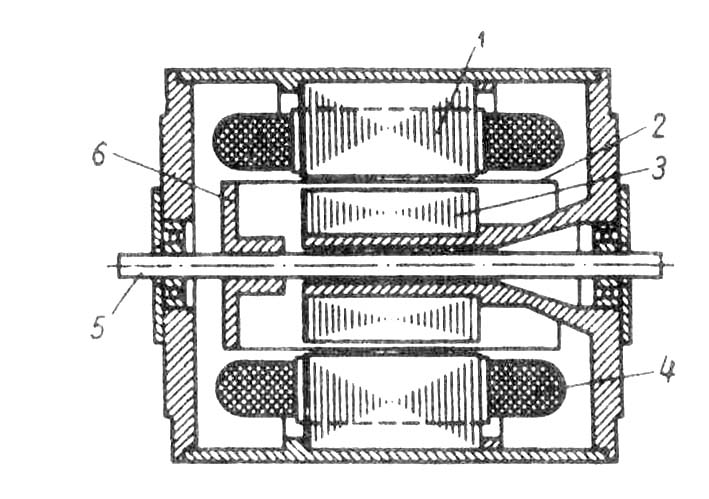
Рис. 17.9. Асинхронный двигатель
с полым немагнитным ротором:
1 — внешний статор; 2 — стакан ротора; 3 — внутренний статор; 4— обмотка статора; 5 — вал; 6 — втулка крепления стакана ротора
Читайте также:
lektsia.com
Для его реализации в пазах полюсных наконечников ротора располагают стержни пусковой короткозамкнутой обмотки. Обычно стержни этой обмотки делают из латуни или меди и замыкают с двух сторон медными кольцами. Для пуска синхронного двигателя обмотку возбуждения замыкают на резистор с активным сопротивлением, примерно в 10 раз превышающим активное сопротивление обмотки возбуждения. Вращающееся поле статора наводит в пусковой обмотке ЭДС, которая создает в стержнях обмотки токи. В результате взаимодействия этих токов с вращающимся полем статора на каждый стержень ротора действует электромагнитная сила FЭм. Совокупность таких сил создает асинхронный электромагнитный момент Ма, под действием которого ротор начинает вращаться в ту же сторону, что и поле статора. После разгона ротора до частоты вращения, близкой к синхронной (), обмотку возбуждения подключают к источнику постоянного тока. При этом полюса ротора намагничиваются, создается синхронный электромагнитный момент М, и двигатель втягивается в синхронизм.
Переход ротора от частоты вращения n2<n1 к синхронной происходит скачком. Не допускается пуск синхронною двигателя с подключенном к источнику постоянного тока обмоткой возбуждения, так как магнитный поток будет наводить в обмотке статора дополнительную ЭДС, а это приведет к возникновению тормозящего момента. Если оставить обмотку возбуждения разомкнутой, то вращающееся поле статора, обгоняя ротор с большой скоростью, наведет в его обмотке значительную ЭДС, способную вызвать пробой межвитковой изоляции обмотки возбуждения.
№ 19
Если принять U неизменным, то ток якоря Ia зависит от проводимости противоЭДС (С*wp*Ф), причем при пуске двигателя, т.е. ток Ia достигает максимального значения, следовательно, при непосредственном подключении двигателя к сети в обмотке эго якоря возникает пусковой ток Iп. Обычно Iп достигает недопустимо больших значений. Это опасно для ИДПТ, т.к.:
- этот ток может вызвать круговой огонь;
- развивается слишком большой пусковой момент, который оказывает ударное действие на вращающиеся части двигателя;
- ток вызывает резкое падение напряжение в сети.
Поэтому пуск ИДПТ непосредственным подключением в сеть (безреостатный пуск) обычно применяют для ИДПТ мощности не более 0,7 – 1 КВт.
При пуске ИДПТ большой мощности для ограничения пускового тока используют пусковые реостаты, включаемые последовательно в цепь якоря (реостатный пуск).
Пусковой ток якоря при полном сопротивлении пускового реостата:
Последовательно рычаг реостата переводят с одного контакта на другой, уменьшая подключаемое сопротивление rр.
При возрастании частоты вращения якоря уменьшается противоЭДС, следовательно, уменьшается пусковой ток Iп. rр выбирают таким образом, чтобы ток Iп max превышал IH в два, три раза.
В ИДПТ большой мощности применяют безреостатный пуск двигателя путем понижения напряжения.
№ 20
Механическая характеристика асинхронного двигателя
Это зависимость вращающегося момента АИД от скольжения, показывающая устойчивость АИД.
Полезный вращающий момент на валу двигателя М2 меньше электромагнитного момента М на величину: , которая соответствует механическим и добавочным потерям, покрываемым за счет механической мощности Рмх на роторе. Поэтому:
Механическая характеристика (рис.1.9) двигателя представляет собой зависимость скорости вращения п от развиваемого момента на валу М2 при U1 = const и f1 = const: n=f(M2) или, наоборот, М2= f(n).
Так как при нагрузке момент Мо мал по сравнению с М и М2, то можно положить или включить М0 в величину статического тормозящего момента Мст, который развивается рабочей машиной или механизмом, приводимым во вращение асинхронным двигателем Поэтому ниже в качестве механической характеристики двигателя будем рассматривать зависимость между n (или s) и электромагнитным моментом:
.
№ 21
studfiles.net

 |
Рис. 5.19. Двухфазный двигатель: а) схема включения;
б) механические характеристики
Исполнительные двигатели отличаются от обычных двухфазных. К исполнительным Д предъявляют следующие требования:
1) отсутствие самохода при отсутствии сигнала в обмотке управления;
2) линейность механических и регулировочных характеристик;
3) малая инерционность;
4) минимальное напряжение троганья;
5) надежность и экономичность способов управления;
6) возможность работы на упор.
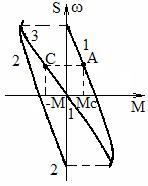
Рис. 5.20. Механические характеристики двухфазного
исполнительного двигателя
Обычный двухфазный Д имеет нелинейный рабочий участок и работает при малых скольжениях (точка  ) (рис. 5.19). При отключении обмотки управления Д переходит в точку
) (рис. 5.19). При отключении обмотки управления Д переходит в точку  характеристики 3 и продолжает вращаться (то есть имеется самоход, что недопустимо). Для исключения самохода исполнительные Д имеют большое сопротивление ротора, что обуславливает большое критическое скольжение (
характеристики 3 и продолжает вращаться (то есть имеется самоход, что недопустимо). Для исключения самохода исполнительные Д имеют большое сопротивление ротора, что обуславливает большое критическое скольжение (  ), то есть характеристика будет выглядеть как на рис. 5.20.
), то есть характеристика будет выглядеть как на рис. 5.20.
При отключении обмотки управления Д переходит в точку  характеристики 3 и мгновенно останавливается. Самоход отсутствует, за счет большого сопротивления характеристика почти линейна.
характеристики 3 и мгновенно останавливается. Самоход отсутствует, за счет большого сопротивления характеристика почти линейна.
Увеличение сопротивления ротора снижает КПД двигателя и пусковой момент, уменьшается пусковой ток. Уменьшение пускового тока является положительным фактором, так как допускает эксплуатацию двигателя при неподвижном роторе, т. е. в режиме короткого замыкания (ток короткого замыкания не превышает номинального).
Управление таким двигателем может осуществляться тремя способами: амплитудным; фазовым; амплитудно-фазовым (самое распространенное).
Важную роль у исполнительных двигателей играет инерционность. Она пропорциональна квадрату диаметра ротора  . Поэтому диаметр ротора стараются уменьшить, а чтобы сохранить мощность, увеличивают его длину, так для исполнительных двигателей
. Поэтому диаметр ротора стараются уменьшить, а чтобы сохранить мощность, увеличивают его длину, так для исполнительных двигателей  , а для двигателей сквозной конструкции
, а для двигателей сквозной конструкции  .
.
Для повышения энергетических показателей двигателя (  и
и  ) уменьшают воздушный зазор (до 0,3-0,5 мм), но при этом увеличиваются силы притяжения между статором и ротором. При малейшей неравномерности зазора увеличивается напряжение троганья. Для того, чтобы исключить перекосы или биения в таких двигателях, их выполняют по сквозной технологии (сквозной конструкции). В этом случае статор двигателя и корпуса подшипников протачиваются за один проход.
) уменьшают воздушный зазор (до 0,3-0,5 мм), но при этом увеличиваются силы притяжения между статором и ротором. При малейшей неравномерности зазора увеличивается напряжение троганья. Для того, чтобы исключить перекосы или биения в таких двигателях, их выполняют по сквозной технологии (сквозной конструкции). В этом случае статор двигателя и корпуса подшипников протачиваются за один проход.
Для повышения быстродействия используют двигатели с полым немагнитным ротором [12].
poznayka.org
|
|
| Рис. 9.5. Векторная диаграмма конденсаторного асинхронного двигателя при круговом поле |
Из векторной диаграммы определим емкость конденсатора Cpнеобходимую для создания кругового вращающегося поля. Для этого из выражения

где xc— реактивное сопротивление конденсатора, найдем

Коэффициент трансформации согласно рис. 9.5
При изменении нагрузки двигателя токи IА, IБи углы φА,φБ изменяются, вращающееся поле становится эллиптическим. Таким образом, с помощью конденсатора Ср в таком двигателе можно получить круговое вращающееся поле только для одного вполне определенного режима.Выбирая конденсатор, следует иметь в виду, что напряжение на нем может быть выше напряжения сети U.
может быть выше напряжения сети U.
При пуске двигателя с включенным конденсатором Ср поле принимает эллиптическую форму и пусковой момент составляет до 30% от МHOM. Для улучшения пусковых характеристик конденсаторного двигателя параллельно с конденсатором Ср в цепь конденсаторной фазы на период пуска включают пусковой конденсатор Сп(см. рис. 9.4). Емкость этого конденсатора рассчитывают, исходя из условия получения достаточного пускового момента По окончании пуска двигателя конденсатор Спотключают и двигатель работает только с конденсатором Ср.
По окончании пуска двигателя конденсатор Спотключают и двигатель работает только с конденсатором Ср.
Конденсаторные двигатели с пусковым и рабочим конденсаторами применяют для приводов с тяжелыми условиями пуска, т. е. с частыми включениями под нагрузкой. Их недостаток - повышенная стоимость из-за наличия конденсаторных батарей. Характеристики конденсаторного двигателя лучше, чем однофазного. Коэффициент мощности cosφ = =0,8 ÷ 0,95, КПД
Заметим, что маломощные трехфазные асинхронные двигатели могут работать от однофазной сети. Схемы их включения приведены на рис. 9.6. На рис. 9.6, а две фазы обмотки статора соединены последовательно и образуют главную обмотку А, а третья Б является пусковой (вспомогательной) и после пуска двигателя отключается вместе с конденсатором Сп. Мощность двигателя в однофазном режиме при этом не превышает 60% от номинальной мощности трехфазного режима.
Если после пуска двигателя конденсатор Сп отключить, оставив включенным лишь конденсатор Ср в цепи обмотки Б (рис. 9.6,6), то двигатель будет работать как конденсаторный, развивая мощность, равную 75-80% от номинальной мощности трехфазного режима

Рис. 9.6. Схемы включения трехфазных асинхронных двигателей в однофазную сеть
На рис. 9.6, в, г приведены другие варианты схем питания трехфазных двигателей от однофазной сети.
Универсальные трехфазные двигатели серии УАД, которые могут работать как от трехфазной, так и однофазной сети, применяют в автоматических устройствах. В этих двигателях на щиток выводятся начала и концы трех фаз обмотки статора.
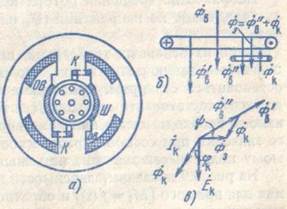
Для привода вентиляторов, электропроигрывателей, магнитофонов применяют однофазные двигатели с экранированными (расщепленными) полюсами (рис. 9.7, а).
На явно выраженных полюсах статора намотаны катушки однофазной обмотки возбуждения ОВ. Каждый полюс статора разделен на две неравные части аксиальным пазом. Меньшую часть полюса охватывает короткозамкнутый виток К. Ротор двигателя - короткозамкнутый.
Вращающееся поле в этом двигателе получают следующим образом. ТокIБ , протекающий по обмотке возбуждения, создает пульсирующий магнитный поток  , (рис. 9.7,б). Одна часть его
, (рис. 9.7,б). Одна часть его  проходит по неэкранированной, а другая
проходит по неэкранированной, а другая  , — по экранированной части полюса. Поток
, — по экранированной части полюса. Поток  создает, как и в трансформаторе, поток
создает, как и в трансформаторе, поток  , короткозамкнутого витка. Поэтому в экранированной части полюса действует результирующий поток
, короткозамкнутого витка. Поэтому в экранированной части полюса действует результирующий поток наводящий ЭДС
наводящий ЭДС  в короткозамкнутом витке (рис. 9.7, в), под действием которой возникает ток
в короткозамкнутом витке (рис. 9.7, в), под действием которой возникает ток  , отстающий от
, отстающий от  по фазе на угол φk, из-за индуктивности витка. Ток
по фазе на угол φk, из-за индуктивности витка. Ток  и создает поток
и создает поток  , совпадающий с ним по фазе (если пренебречь потерями в стали)..
, совпадающий с ним по фазе (если пренебречь потерями в стали)..
|
|
| Рис. 9.7. К объяснению принципа действия однофазного двигателя с экранированными полюсами |
Таким образом, в двигателе потоки экранированной ( ) и неэкранированной (
) и неэкранированной ( ) частей полюса сдвинуты во времени на некоторый угол ψ (рис. 9.7,в). Кроме того, экранированная и неэкранированная части полюса сдвинуты и в пространстве. Вследствие недостаточного сдвига потоков
) частей полюса сдвинуты во времени на некоторый угол ψ (рис. 9.7,в). Кроме того, экранированная и неэкранированная части полюса сдвинуты и в пространстве. Вследствие недостаточного сдвига потоков  и
и  во времени и в пространстве и их неравенства результирующее поле двигателя будет эллиптическим, но этого достаточно, чтобы двигатель создавал пусковой момент, составляющий 20 - 40% Mном.
во времени и в пространстве и их неравенства результирующее поле двигателя будет эллиптическим, но этого достаточно, чтобы двигатель создавал пусковой момент, составляющий 20 - 40% Mном.
Для некоторого выравнивания потоков  и
и  между наконечниками полюсов помещают магнитные шунты Ш в виде стальных пластин (рис. 9.7, а).
между наконечниками полюсов помещают магнитные шунты Ш в виде стальных пластин (рис. 9.7, а).
Двигатели с экранированными полюсами изготовляют мощностью от долей ватта до 300 Вт при напряжениях 115, 127 и 220 В. Для таких двигателей опасны частые пуски. Недостатки их - отсутствие реверса, низкие КПД (до 20-40%) и соs φ = 0,4 + 0,6
§ 9.3. Исполнительные асинхронные двигатели
В зависимости от конструкции ротора различают следующие виды асинхронных исполнительных двигателей: 1) с полым немагнитным ротором; 2) с короткозамкнутым ротором; 3) с полым ферромагнитным ротором; 4) с массивным ферромагнитным ротором.
vunivere.ru
 Асинхронные исполнительные двигатели
Асинхронные исполнительные двигатели просмотров - 441
В системах управления, регулирования и контроля широко применяются управляемые электродвигатели небольшой мощности. С помощью этих двигателей осуществляется
Рис. 17.7. Схема включения
асинхронного исполнительного двигателя
преобразование электрического сигнала в механическое перемещение — вращение вала. Такие электродвигатели называют исполнительными (ИД).
Характер требований, предъявляемых к исполнительным двигателям, определяется спецификой их работы: частые пуски, реверсы, постоянно изменяющаяся частота вращения. Основные требования - отсутствие самохода, т. е. самоторможение при снятии сигнала управления; широкий диапазон регулирования частоты вращения; линейность характеристик; большой пусковой момент; малая мощность управления; быстродействие (малоинерционность).
На статоре асинхронного исполнительного двигателя расположена двухфазная обмотка (см. § 16.2). Одна из фазных обмоток — обмотка возбуждения (ОВ) - постоянно включена в сеть с напряжением U1, а на другую - обмотку управления (ОУ) — напряжение (сигнал управления) Uc подается лишь при крайне важности включения двигателя (рис. 17.7).
Для работы двухфазного ИД крайне важно вращающееся магнитное поле, непременным условием возникновения которого является наличие пространственного и временного сдвигов между МДС фазных обмоток статора. Пространственный сдвиг указанных МДС обеспечивается конструкцией обмотки статора, при ко торой оси фазных обмоток сдвинуты в пространстве относительно друг друга обычно на угол 90 эл. град. Временной (фазный) сдвиг МДС создается либо питанием обмотки статора двухфазной сие темой напряжений (см. § 16.2), либо включением в цепь ОУ фазовращателя — устройства, позволяющего получать различные фазовые сдвиги напряжения на его выходе относительно напряжения на входе, т. е. относительно напряжения на обмотке возбуждения, либо включением последовательно в цепь ОВ емкости ( (рис. 17.7).
Последний способ включения ИД применяют наиболее часто Обычно значение емкости С выбирают из условия получения кругового поля при пуске двигателя. По окончании пускового периода двигатель работает с эллиптическим вращающимся полем.
В процессе управления двигателем изменяют сигнал Uс на ОУ при этом меняется как значение (амплитуда) МДС этой обмотки, так и ее фазовый сдвиг относительно МДС обмотки возбуждения. По этой причине рассматриваемый способ управления ИД называют амплитудно-фазовым.
Одно из базовых требований к ИД — отсутствие самохода. Известно, что обычные асинхронные двигатели имеют небольшое активное сопротивление обмотки ротора и работают с малым критическим скольжением (см. § 13.3). Такие двигатели непригодны в качестве исполнительных, так как они обладают самоходом, т. е. при снятии сигнала управления двигатель будет продолжать работать как однофазный. Это иллюстрирует рис. 17.8, а, на котором точка А определяет режим работы двигателя с нагрузочным моментом Миом при наличии сигнала управления. При снятии сигнала управления поле статора становится пульсирующим (обмотка возбужения постоянно включена в сеть) и режим
Рис. 17.8. Устранение самохода в асинхронном
исполнительном двигателе
работы двигателя "определяется точкой В на характеристике однофазного двигателя. При этом электромагнитный момент двигателя останется положительным. В случае если же увеличить активное сопротивление ротора, то форма кривых прямого Мпр, обратного Мобр и результирующего М = Мпр + Мобр моментов изменится (рис. 17.8, б): максимумы моментов Мпр и Мобр сместятся в область больших скольжений (sкр > 1 ). Теперь после прекращения сигнала управления, т. е. при переходе двигателя в однофазный режим, электромагнитный момент становится отрицательным Мт (точка В) и оказывает на ротор тормозящее действие, не допуская самохода.
К исполнительным двигателям предъявляется также требования малоинерционности (быстродействия), т. е. при подаче сигнала управления ротор двигателя должен очень быстро достигать установившейся частоты вращения. Выполнению этого требования
способствуют увеличение пускового момента͵ уменьшение синхронной частоты вращения поля статора и снижение момента инерции ротора. При повышенных частотах питающего напряжения (больших синхронных частотах вращения) ИД с ротором обычной (короткозамкнутой) конструкции из-за значительного момента инерции последнего не обладают требуемым быстродействием. В этом случае применяют асинхронные
исполнительные двигатели с полым немагнитным ротором (рис. 17.9). Полый немагнитный ротор представляет собой тонкостенный алюминиевый стакан 2, что, с одной стороны, обеспечивает ротору повышенное активное сопротивление, а с другой — весьма небольшой момент инерции.
Двигатель имеет два статора: внешний 1 с обмоткой и внутренний 3 без обмотки, входящий внутрь полого стакана ротора Внутренний статор необходим для уменьшения магнитного сопро тивления основному магнитному потоку.
По сравнению с исполни тельными двигателями обычно и конструкции двигатели с полым немагнитным ротором имею! повышенные габариты и невысокий КПД. Это объясняется повышенным зазором между наружным и внутренним статорами, который складывает ся из толщины стенки стакана ротора и двух воздушных зазо ров. Как известно, увеличение воздушного зазора способствуем росту намагничивающего тока двигателя и снижению его КПД.
Рис. 17.9. Асинхронный двигатель
с полым немагнитным ротором:
1 — внешний статор; 2 — стакан ротора; 3 — внутренний статор; 4— обмотка статора; 5 — вал; 6 — втулка крепления стакана ротора
По конструктивному исполнению АИД с ротором в виде беличьей клетки аналогичны обычным АД. В отличии от последних, в целях увеличения активного сопротивления стержни ротора АИД выполняются из материала с повышенным удельным активным сопротивлением (латуни, фосфористой... [читать подробенее]
б) а) В качестве исполнительных АД часто используются двухфазные АД. Двухфазный АД имеет две обмотки: обмотку возбуждения (ОВ) и обмотку управления (ОУ) (рис. 5.19) Обмотка возбуждения постоянно включена в сеть. На обмотку управления подается управляющий... [читать подробенее]
В системах управления, регулирования и контроля широко применяются управляемые электродвигатели небольшой мощности. С помощью этих двигателей осуществляется Рис. 17.7. Схема включения асинхронного исполнительного двигателя преобразование электрического сигнала... [читать подробенее]
oplib.ru